Моделирование нагрузки ленточного конвейера роторного экскаватора большой единичной мощности

Автор: Минеев А.В., Милосердов Е.Е.
Журнал: Журнал Сибирского федерального университета. Серия: Техника и технологии @technologies-sfu
Статья в выпуске: 3 т.2, 2009 года.
Бесплатный доступ
На нагрузку ленточного конвейера роторного экскаватора большой единичной мощности влияет большое количество различных факторов. При моделировании нагрузок следует учитывать все эти факторы с целью добиться наиболее близкой к действительности картины нагружения конвейера. Получены формулы, наиболее точно описывающие механизм нагружений и факторов, которые влияют на нагрузку, действующую на конвейер роторного экскаватора, что позволяет моделировать влияние нагрузки на конвейер максимально, приближенной к реальности.
Конвейер, экскаватор, моделирование, нагрузка
Короткий адрес: https://sciup.org/146114508
IDR: 146114508 | УДК: 658.386.3.633.33
Modeling of loading of the tape conveyor of rotor dredge of the big individual capacity
Loading of the tape conveyor of rotor dredge of the big individual capacity is influenced by a considerable quantity of various factors. At modeling of loadings it is necessary to consider all these factors on purpose to achieve the picture most close to the truth loading of the conveyor. Formulas most precisely describing the mechanism loads and factors influencing loading operating on the conveyor of rotor dredge that allows to model influence of loading on the conveyor as much as possible approached to a reality are received.
Текст научной статьи Моделирование нагрузки ленточного конвейера роторного экскаватора большой единичной мощности
При моделировании нагрузки конвейерной техники непрерывного действия следует учитывать большое количество различных факторов.
Распределенная нагрузка перемещаемой конвейером горной массы, а также вес самой ленты создают нагрузку на опорные ролики, определяющие возрастание усилия в ленте пропорционально длине нагруженного участка [1]. В данной статье рассматриваются факторы, влияющие на нагружение ленточного конвейера, и формулы, позволяющие моделировать эти факторы на этапе проектирования данной системы.
Математическое моделирование нагрузки конвейера роторного экскаватора
Следует учитывать, что если конвейер работает в наклонном положении, возникает составляющая силы веса, воспринимаемая лентой на данном участке конвейера. В этом случае удельное усилие в ленте на загруженном участке, связанное с действием весовой нагрузки (рис. 1), определяется следующим образом:
Fg( l ) = (g + g 0 ) (K оп ⋅ cos β KJI + sin β KJI ), (1)
где g – вес породы на 1 м ленты;
g0 – вес 1 м ленты;
K оп – коэффициент удельного сопротивления опорных устройств.
Величину g определяем из следующего соотношения:
g = Q T ⋅ ρ /3600V К ⋅ K p ,
где Q T – текущее значение производительности экскаватора;
VK – скорость движения ленты конвейера;
K p – коэффициент разрыхления горной массы.
Сопротивление, создаваемое очистительными устройствами, которые удаляют прилипшую на конвейере породу, определяем следующим образом:
F04 = q04 ⋅ β. (3)
Усилие, необходимое для перегиба ленты и преодоления трения в подшипниках барабана, получаем из следующего соотношения:
F = K из ⋅ β,
где Kиз – коэффициент, зависящий от ширины барабана.
Величину мощности для сообщения поступающей горной массе дополнительной кинетической энергии получим из выражения
V Э – скорость экскавации.
Определяем количество движения (импульс тела):
FСБ – сила скольжения барабана;
а Б - диаметр барабана.
Величину суммарной расчетной мощности двигателей конвейера получим по формуле м, • W.
Р дкл = К 3 —-~
. п р
Угловая скорость барабана конвейерной линии и линейная скорость конвейерной ленты связаны соотношением
W S K КЛ
= 2 V K
а Б
В данном случае коэффициент запаса К3 вводится для учета неравномерности распределения нагрузки между двигателями.
Угловые скорости приводных двигателей и барабана конвейера связаны между собой выражением
W5 Kкл = W8 кл • i , (10)
где i – передаточное отношение привода барабана.
Для моделирования срабатывания упругих муфт выполняется анализ
” 5 . кл — ''л . ллм"
Кроме того, в моменте сопротивления движению ленты необходимо учитывать момент от электромагнитных тормозов на быстроходных валах передач.
Приводы поворота и конвейерной линии разгрузочной консоли роторного экскаватора
В этом случае при работе механизмов поворота стрелы ротора и разгрузочной консоли при моделировании сил, моментов и скоростей описываются теми же уравнениями. Эти же соображения позволяют использовать для моделирования работы конвейерной линии разгрузочной консоли уравнения (1-10), записанные для ленточного конвейера ротора.
Механизмы привода хода экскаватора
Статическая нагрузка привода шагающе-рельсового хода при перемещении экскаватора определяется следующими имеющимися факторами: трением качения ходовых колес; трением в подшипниках ходовых колес; преодолением скатывающей силы при негоризонтальном положении (установке) лыжи; действием ветрового напора; сопротивлением горной массы при врезке роторного колеса подачей на забой [2].
Схема усилий механизма хода приведена на рис. 2 (одна из имеющихся четырех лыж роторного экскаватора).
В этом случае составляющая натяжения тягового каната от сил трения при допущении о равномерном распределении нагрузки на ходовые тележки из учета К П Д полиспаста определяется следующим образом:
G cos р 2 ц+ац • f к
,
1 Т • К • ТР . . п ТР-ГР jr • in Dk где jT – число ходовых тележек;
-
in – кратность полиспаста;
-
f к , μ – соответственно, коэффициенты трения качения и трения скольжения;
-
αЦ – диаметр цапфы подшипника;
Dk – диаметр ходового колеса.
Выводы
Уравнения, представленные в данной статье, позволяют моделировать факторы и нагрузки, влияющие на работу не только ленточного конвейера роторного экскаватора, но и разгру- – 339 –
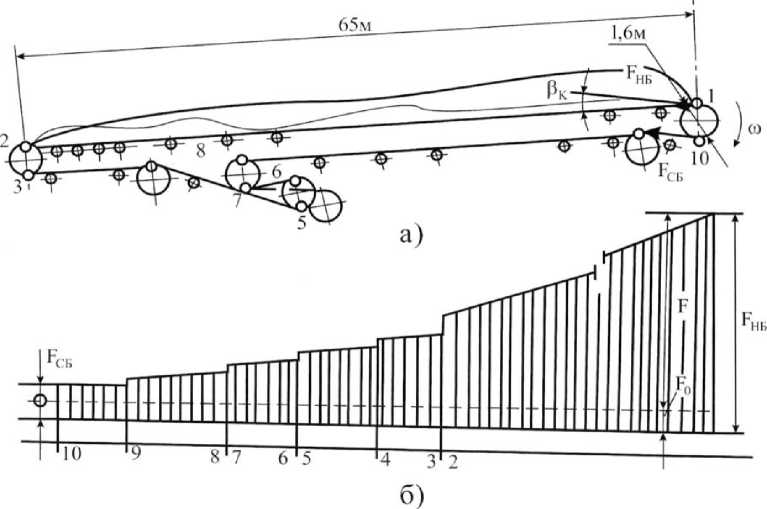
Рис. 1. Схема конвейера стрелы ротора
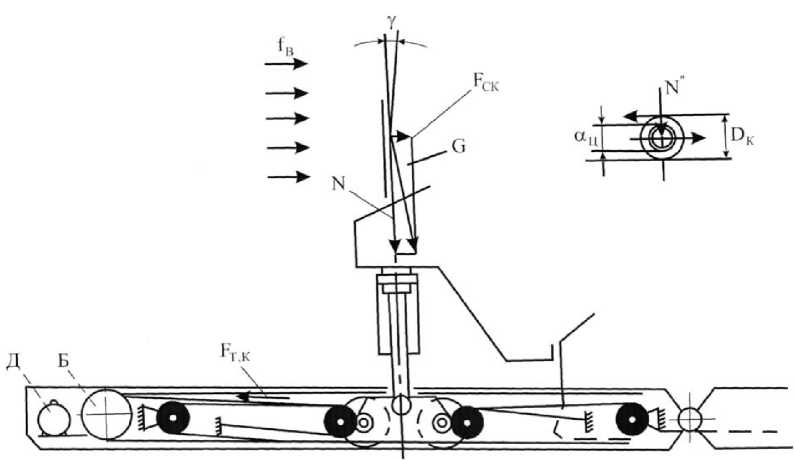
Рис. 2. Схема усилий механизма хода зочной консоли и поворота стрелы ротора, что, несомненно, упрощает процесс моделирования и проектирования систем роторных экскаваторов.
