Моделирование некомпланарного межпланетного перелета космического аппарата с солнечным парусом с учетом особенностей движения относительно центра масс

Автор: Р.М. Хабибуллин, О.Л. Старинова
Журнал: Космические аппараты и технологии.
Рубрика: Ракетно-космическая техника
Статья в выпуске: 3, 2020 года.
Бесплатный доступ
Работа посвящена некомпланарному межпланетному перелету Земля–Венера космического аппарата, оснащенного неидеально отражающим солнечным парусом, величина и направление ускорения от которого рассчитываются с учетом зеркального и диффузного отражений, поглощения и пропускания фотонов поверхностью солнечного паруса. Целью гелиоцентрического движения является попадание космического аппарата с солнечным парусом в сферу Хилла Венеры – области пространства, в которой могут двигаться тела, оставаясь спутником планеты. Особенностью работы является исследование движения космического аппарата с неидеально отражающим солнечным парусом с учетом движения относительно центра масс. Для этого задача разбивается на три этапа. На первом этапе формируется номинальная программа управления движением центра масс космического аппарата. На втором этапе определяются достаточные угловые скорости для обеспечения полученной программы номинального управления и рассчитываются параметры органов управления космического аппарата – тонкопленочных элементов управления, расположенных по периметру солнечного паруса. Принцип работы органов управления довольно прост. При изменении напряжения, подающегося на тонкопленочный элемент управления, он становится прозрачным или непрозрачным, возникает разница нормальных составляющих сил светового давления, обеспечивающая создание управляющего момента для изменения ориентации космического аппарата в пространстве. На третьем этапе проводится моделирование совместного движения центра масс и относительно центра масс космического аппарата для демонстрации реализуемости полученной программы управления. В результате проводится сравнение некомпланарных межпланетных перелетов Земля–Венера с учетом и без учета тонкопленочных элементов управления.
Неидеально отражающий солнечный парус, программа номинального управления, некомпланарный межпланетный перелет, тонкопленочный элемент управления
Короткий адрес: https://sciup.org/14117446
IDR: 14117446 | УДК: 629.78 | DOI: 10.26732/j.st.2020.3.02
Non-coplanar interplanetary flight simulation considering motion relative to the center of mass peculiarities of solar sail spacecraft
The paper is devoted to the non-coplanar interplanetary Earth–Venus flight of a spacecraft equipped with a non-perfectly reflecting solar sail, the magnitude and direction of acceleration from which is calculated taking into account specular and diffuse reflections, absorption and transmission of photons by the surface of the solar sail. The goal of the heliocentric motion is to transfer the solar sail spacecraft into the Hill sphere of Venus with zero hyperbolic excess of speed. A feature of the paper is the study of the motion of a non-perfectly reflecting solar sail spacecraft taking into account the motion relative to the center of mass. The problem is divided into three stages. At the first stage, a nominal program for controlling the motion of the spacecraft center of mass is formed. At the second stage, sufficient angular velocities are determined to ensure the obtained nominal control program and the parameters of the spacecraft controls – thin-film controls located along the perimeter of the solar sail – are calculated. The operating principle of the thin-film controls is quite simple. When the voltage applied to the thin-film controls changes, they become transparent or opaque, there is a difference in the normal components of the light pressure forces, which provides a control torque for changing the orientation of the spacecraft in space. At the third stage, the joint motion of the center of mass and relative to the center of mass of the spacecraft is simulated to demonstrate the feasibility of the obtained control program. As a result, a comparison is made of non-coplanar interplanetary Earth–Venus flights with and without thin-film control elements.
Текст статьи Моделирование некомпланарного межпланетного перелета космического аппарата с солнечным парусом с учетом особенностей движения относительно центра масс
Согласно Федеральной космической программе России на 2016–2025 годы, утвержденной постановлением Правительства РФ от 23 марта 2016 года № 230, одной из основных задач является выполнение международных обязательств «по участию не менее чем в двух миссиях в рамках международной кооперации по исследованию Марса, Венеры, Меркурия и Солнца, в осуществлении полетов автоматических космических ап-
паратов (КА) к планетам и телам земной группы». Исследование планет и околосолнечного пространства предоставляет возможность найти ответы на многие фундаментальные вопросы формирования Солнечной системы, возникновения и развития жизни на Земле. Перспективным путем снижения стоимости подобных миссий является использование физических принципов, не связанных с затратами рабочего тела, для формирования заданных гелиоцентрических траекторий, например, движение с помощью солнечного паруса (СП). СП – это приспособление, использующее давление солнечного света на отражающую поверхность для приведения в движение КА [1]. Значительное

К1ЛЕ АППАРАТЫ Ш
Том 4
преимущество использования СП состоит в том, что он способен заменить двигательную установку на борту малого КА. Отсутствие рабочего тела позволяет существенно уменьшить массу всего КА и продлить срок его активного существования.
Недостаточно изучен вопрос движения относительно центра масс (ЦМ) КА с СП каркасного типа, который необходимо учитывать при формировании программ номинального управления КА. В работах [2-5] описаны способы управления ориентацией СП роторного типа с помощью тонкопленочных элементов управления (ТЭУ), 142 не требующих применения механических воздействий. ТЭУ располагаются в дискретных областях на поверхности СП и способны изменять отражательную способность. При изменении напряжения, подающегося на ТЭУ, он становится прозрач- ным или непрозрачным, возникает разница нормальных составляющих сил светового давления, обеспечивающая создание управляющего момента для изменения ориентации КА в пространстве.
Работы, посвященные анализу этой перспективной возможности управления ориентацией КА с СП каркасного типа в пространстве с помощью ТЭУ при совершении некомпланарных межпланетных перелетов, отсутствуют. Следовательно, обоснование успешного применения программы управления гелиоцентрическим перелетом с заданными проектными параметрами КА с СП является актуальной научной проблемой.
1. Постановка задачи
Рассматривается межпланетный некомпланарный перелет КА с неидеально отражающим СП с гелиоцентрической орбиты Земли к Венере. Неидеально отражающий СП – это СП, величина и направление ускорения от которого рассчитываются с учетом зеркального и диффузного отражений, поглощения и пропускания фотонов поверхностью СП. Предполагается, что КА выведен из сферы действия Земли с помощью разгонного блока. Цель перелета – попадание в сферу Хилла планеты – области пространства, в которой могут двигаться тела, оставаясь спутником планеты. Для выполнения поставленной цели достаточно чтобы расстояние между КА и планетой Dist было меньше радиуса Хилла планеты R Хилла при значении интеграла энергии КА h меньше нуля.
Введем систему координат OPNS, связанную с СП (рис. 1). Точка O является центром системы координат и совпадает с ЦМ КА с СП. Ось OP направлена по вектору р, лежащему в плоскости СП и совпадающему с проекцией на поверхность СП радиус-вектора r. Ось ON направлена по вектору нормали СП n в сторону от источника света. Ось OS лежит в плоскости СП и дополняет систему координат до правой. Угол X между век- тором нормали n и радиус-вектором r будем называть углом установки СП или управляющим углом.
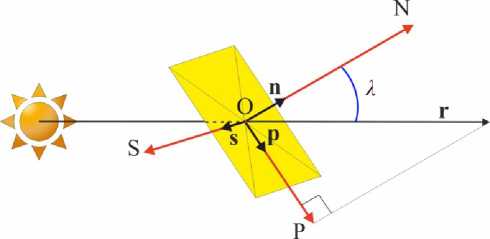
Рис. 1. Система координат OPNS, связанная с СП
Введем вектор фазовых координат X , описывающий движение ЦМ и движение относительно ЦМ КА в комбинированной системе координат [6]:
X = (r, u, Vr, Vu, Q, i, 0 p, 0 n, 0,, ю p, ю n, ю, )Т, где r – гелиоцентрическое расстояние КА с СП; и - аргумент широты; Vr, Vu - радиальная и трансверсальная скорости; Ω – долгота восходящего узла орбиты; i - наклонение орбиты; 9p, 9n, 9s - углы поворота СП относительно осей OP, ON, OS; ωp, ωn, ωs – соответствующие угловые скорости.
Поскольку в работе рассматривается КА каркасного типа, то нет необходимости управлять собственным вращением СП относительно оси ON. Для описания номинального управления движением КА вводится вектор U [6]:
U = {8 p (t), 8, (t)}", где 8p(t), 5s(t) - функции номинального управления, определяющие вращение СП относительно осей OP и OS соответственно. Функции δp(t) и δs(t) принимают значение «+1» при увеличении угла установки СП X, «-1» - при уменьшении угла установки СП X, «0» - при неизменности ориентации СП. Собственное вращение СП относительно оси ON не учитывается. В работе рассматривается последовательное управление, что исключает возможность вращения относительно двух осей одновременно. Данное допущение должно быть обусловлено неравенством:
18 p ( t )| + |8 , ( t ) < 1.
Фиксированный вектор проектных параметров prm КА с СП описывается следующим образом [6]:
prm = {m, m m, 5, р, р r ,р d, а, т, h тэу }г, где m - масса КА с СП; mСП - масса СП; S - площадь СП; р - коэффициент отражения поверхности СП; ρr – коэффициент зеркального отражения поверхности СП; ρd – коэффициент диффузного отражения поверхности СП; а - коэффициент по- глощения фотонов поверхностью СП; τ – коэффициент пропускания; hТЭУ – ширина ТЭУ.
Параметры вектора фазовых координат X и вектора управления U должны удовлетворять следующим ограничениям:
ωдост ≤ ω < ωпред , где ωдост – достаточная угловая скорость, необходимая для выполнения программного разворота; ω – вектор угловой скорости КА; ωпред – предельная угловая скорость, при которой КА будет испытывать критические нагрузки.
Граничные условия гелиоцентрического перелета обеспечивают попадание КА с СП в сферу Хилла планеты и записываются следующим образом [6]:
X ( t 0 ) = X o , X ( t k ) = X k .
В качестве основного критерия оптимальности выбрано минимальное время перелета tk → min:
U opt ( t ) =
= arg min t k ( U |prm e P , X( t о ) = Xo , X( t k ) = X k ) .
u ( t )
Предлагается следующая процедура решения данной задачи:
-
• получение номинальной программы управления движением ЦМ КА;
-
• определение достаточных угловых скоростей для обеспечения полученной программы номинального управления, расчет параметров органов управления ТЭУ;
-
• моделирование совместного движения ЦМ и относительно ЦМ для демонстрации реализуемости полученной программы управления.
-
2. Математическая модель движения
В рамках данной работы рассматривается модель плоского неидеально отражающего СП со следующими допущениями [6]:
-
• ρ = const ≠ 0, α = const ≠ 0, τ = const ≠ 0;
-
• рассеивание диффузно отраженных фотонов происходит равномерно во всех направлени-
- ях в полуплоскости, соответственно, направление результирующего вектора силы от рассеянных фотонов совпадает с направлением нормали к СП;
-
• излучение на поверхности СП от нагрева поглощенных фотонов происходит равномерно по всем направлениям в полуплоскости, т. е. результирующий вектор силы тяги от поглощенных фотонов совпадает с направлением падения фотонов.
Принятые допущения позволяют сформировать новую модель неидеально отражающего СП. Введем подвижную объектоцентрическую систему координат ORUZ (рис. 2), которая используется при моделировании гелиоцентриче- 143
ского движения КА с СП. Точка O – центр системы координат, совпадающая с ЦМ КА. Ось OR направлена по радиус-вектору r в сторону от источника света. Ось OU лежит в плоскости орбиты и направлена по движению КА. Ось OZ перпендикулярна плоскости орбиты и дополняет систему координат до правой. Положение плоскости орбиты определяется долготой восходящего узла Ω и наклонением i .
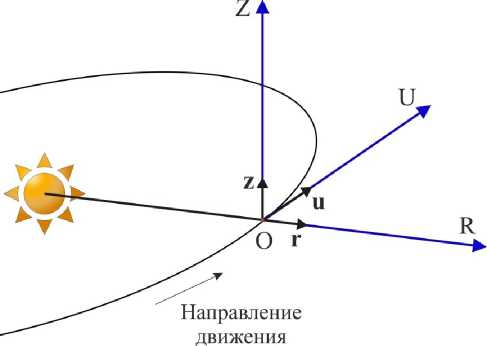
Рис. 2. Подвижная объектоцентрическая система координат ORUZ
Вектор полного ускорения a в системе координат ORUZ с учетом особенностей отражательной способности поверхности СП записывается следующим образом:
a
p
sin Xj
cos 2 X2 +
a
r
к
Г
sin X2 I . . .
-----1 I + sin X2 cosXj к sin X, J
sin 2 X —
2 1 sin X2 I к J
+ a „ cos X2 cos Xj
a = a u
az
a p
sin X 1 sin X 2
sin X2 —
к
2 sinkl I к sin X[ J
—
cos 2 X 2 +
sin X2 I .
-----1 I cosX , к sin Xj J
+ a n cosX 2 sin X 1
;
sin X2 I . .
ap cosX2
sin 2 X —
. л2 I — a n sin X 2 к sin X, J
(оСМИЧЕскиЕ
АППАРАТЫ И
Том 4
a p = P 3
R о Y
f
r J m
— cos X 1 cos X 2 1 — p + a
8 f B f
—
8 6B?
к
8 f +8 b
■ sin 2 X 1 cos 2 X 2 + sin 2 X 2;
J
а -Р I R0 I an = РЗI I
S
r ) m
S
— cos X 1 cos X 2 1 + p + a
8 J Bf
—
8 b B b )
.
к
8 f + 8 b )
Здесь PЗ - давление отвесно падающего солнечного света на полностью поглощающую поверхность «абсолютно черного» тела на орбите Земли, PЗ = 4,55И0"6 Н^м-2; R0 - среднее расстояние между 144 ЦМ Солнца и Земли, R0= 1 а.е.; еf, еb - коэффициен ты излучения освещенной и теневой стороны СП; Bf, Bb – коэффициенты эмиссионной диффузии освещенной и теневой стороны СП соответственно; Х1 - угол между радиус-вектором и проекцией нормали СП на плоскость орбиты; λ2 – угол между нормалью СП и ее проекцией на плоскость орбиты.
В табл. 1 приведены оптические характеристики поверхности неидеально отражающей модели СП.
Таблица 1
Оптические характеристики поверхности СП
|
Модель |
Оптические коэффициенты поверхности СП |
||||||||
|
ρ |
ρ r |
ρ d |
α |
ε f |
ε b |
B f |
B b |
τ |
|
|
Неидеально отражающий СП [7] |
0,87 |
0,94 |
0,06 |
0,12 |
0,05 |
0,55 |
0,79 |
0,55 |
0,01 |
Сформирована математическая модель гелиоцентрического движения ЦМ КА, которая описывается традиционной системой дифференциальных уравнений в комбинированной системе координат с учетом гравитации Земли и Венеры [8].
Движение относительно ЦМ КА осуществляется за счет изменения отражательных свойств ТЭУ (рис. 3). Пусть фотоны падают на поверхность СП по направлению нормали n к СП. С одной стороны СП ТЭУ отключены от подачи тока, поэтому на эту сторону СП от падающих и отраженных фотонов будет действовать сила F 1 . На ТЭУ с другой стороны СП подано напряжение, в результате чего на эту сторону СП от падающих и поглощенных фотонов будет действовать сила F 2.
Очевидно, что F 1 > F 2. За счет разницы нормальных составляющих сил светового давления A F = F 1 - F 2, действующих на ТЭУ, создается внешний момент, влияющий на ориентацию СП. Подобное управление было успешно испытано на КА с СП IKAROS [9]. ТЭУ, меняющие свои отражательные свойства, позволяют управлять пространственной ориентацией СП без использования гироскопов, корректирующих двигателей и других устройств, что, в результате, уменьшает массу всей конструкции КА с СП.
Математическая модель движения относительно ЦМ с учетом особенностей отражательной способности поверхности СП и ТЭУ, а также размеров ТЭУ описывается следующим образом:
О p = ю p
0 n = ю n
*
О 5
= d 5
12 Р з
cosX 1 cos X2 х
к
Ю Р
Х
к
cosX 1 cosX2 р r р + а к
8 f B f
- 8 b B b ^
8 f +8 b J
+ (1 -р r ) р B f ( ^S + h ТЭУ ) + d n ю 5
_ m СП S
d) n = 0
ю
Х
к
(
12 P З
cosX 1 cosX2 х
( cosX1 cosX2 рrр + а к
8 f B f
-8 b B b )
8 f +8 b J
+ (1 -р r ) р B f ^И+^ ТЭУ^ + d p to n
_ m СП S
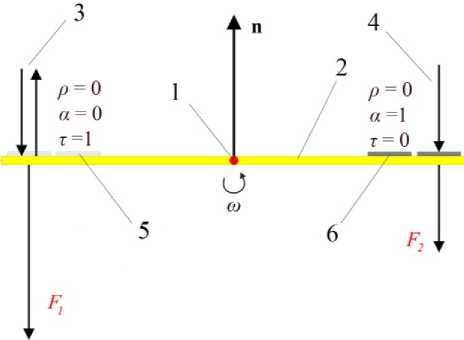
Рис. 3. Принцип работы ТЭУ ориентацией СП (1 – ЦМ КА; 2 – СП; 3 – падающие и отраженные фотоны; 4 – падающие фотоны; 5 – ТЭУ, питание выключено; 6 – ТЭУ, питание включено)
ЦМ КА рассматривается как точка сосредоточенной массы, разворот осуществляет только СП, обладающий массой mСП. Разработанная математическая модель движения КА с неидеально отражающим СП позволяет анализировать воз можность управления крупногабаритной тонкопленочной конструкцией для реализации перелетов между некомпланарными гелиоцентрическими орбитами.
-
3. Результаты моделирования некомпланарного перелета Земля–Венера с учетом движения относительно центра масс
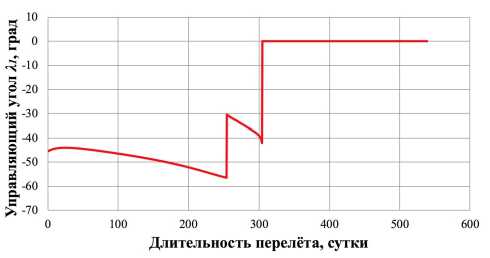
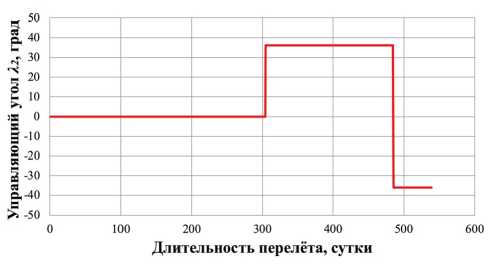
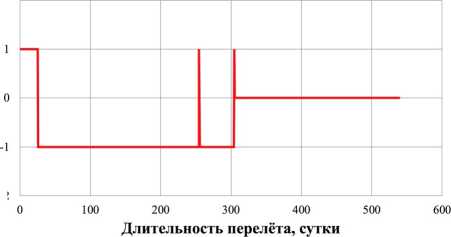
В соответствии с процедурой решения поставленной задачи было проведено моделирование движения ЦМ КА массой 39,8 кг с неидеально отражающим СП площадью 500 м 2 и получено номинальное управление движения для осуществления перелета Земля-Венера (рис. 4 и 5). Управляющие углы X j и X 2 и функции управления 5 p и 5 ^ описывают номинальную программу управления движением КА с СП. Процедура формирования номинальных программ управления движения КА с СП, основанная на базе использования законов локально-оптимального управления (ЗЛОУ), рассмотрена в [10].
аб
Рис. 4. Зависимости управляющих углов во времени: а ) угол X j ; б) угол X 2
а

б
Рис. 5. Зависимости функции управления во времени: а ) функция управления δ p ; б ) функция управления δ s
По результатам проведения моделирования движения ЦМ КА с неидеально отражающим СП выявлено, что для реализации гелиоцентрического некомпланарного перелета ЦМ КА с неидеаль- но отражающим СП с орбиты Земли к Венере на расстояние 579 226 км потребовалось 539 суток. Интеграл энергии достиг значения -0,140 км2·с-2, что ниже нуля. Полученные значения расстояния
KI/IEАППАРАТЫ 1/1
Том 4
до Венеры и интеграла энергии демонстрируют возможность КА двигаться внутри сферы Хилла, оставаясь спутником планеты. Из этого следует, что полученная программа номинального управления позволяет выполнить поставленную задачу.
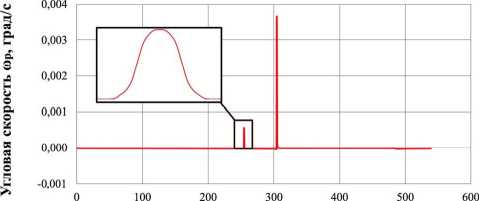
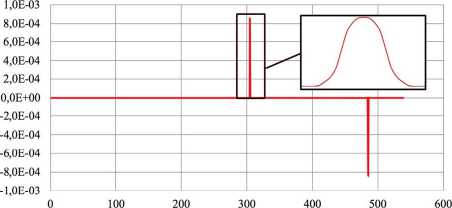
Далее, в соответствии с процедурой решения поставленной задачи, определены максимальная достаточная угловая скорость ωдост и ширина ТЭУ h ТЭУ для реализации найденной программы номинального управления. Графики изменения угловых скоростей ω p и ω s относительно осей OP и OS приведены на рис. 6.
Длительность перелёта, сутки
а
На рис. 7 представлен модуль вектора угловой скорости |ю|, с помощью которого и определены достаточные угловые скорости и необходимые габариты ТЭУ По рис. 7 видно, что весь перелет можно условно разделить на 7 участков – 3 с резким изменением угла управления (участки 2, 4, 6) и 4 с плавным изменением ориентации СП (участки 1, 3, 5, 7). Для каждого участка определена максимальная достаточная угловая скорость и габариты ТЭУ в зависимости от расстояния от источника света и управляющего угла. Результаты расчета представлены в табл. 2.
Длительность перелёта, сутки
б
Рис. 6. Зависимости угловой скорости во времени:

Рис. 7. Зависимости модуля вектора угловой скорости во времени
Таблица 2
К определению максимальной достаточной угловой скорости и габаритов ТЭУ
|
№ участка |
Временной период, сут. |
Расстояние до источника света, a.e. |
|λ|max, град |
|ω дост |, град/с |
h ТЭУ , м |
S ТЭУ , м2 |
% от S , % |
|
|
Начало |
Завершение |
|||||||
|
1 |
0 |
254 |
1,02 |
-56,44 |
2,53∙10-5 |
0,235 |
20,780 |
4,156 |
|
2 |
254 |
255 |
0,75 |
-30,48 |
5,59∙10-4 |
0,123 |
10,940 |
2,188 |
|
3 |
255 |
304 |
0,75 |
-41,97 |
3,84∙10-5 |
0,011 |
1,000 |
0,200 |
|
4 |
304 |
305 |
0,72 |
36,10 |
4,61∙10 -3 |
1,062 |
90,487 |
18,097 |
|
5 |
305 |
485 |
0,77 |
36,10 |
2,72∙10-5 |
0,007 |
0,650 |
0,130 |
|
6 |
485 |
486 |
0,75 |
-36,10 |
8,37∙10-4 |
0,201 |
17,838 |
3,568 |
|
7 |
486 |
1000 |
0,75 |
-36,10 |
3,67∙10-5 |
0,009 |
0,800 |
0,160 |
Из табл. 2 видно, что для реализации программы номинального управления движением КА необходимо установить на СП ТЭУ шириной 1,062 м. Площадь ТЭУ SТЭУ равна 90,487 м2, что составляет около 18 % от общей площади СП. Именно такие габариты ТЭУ обеспечивают достаточную угловую скорость ωдост, равную 4,61∙10-3 град/с, на 304 день перелета на расстоянии 0,72 а.е. от источника света.
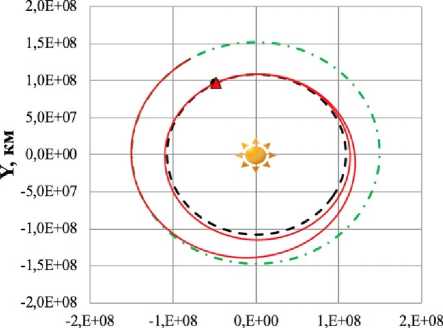
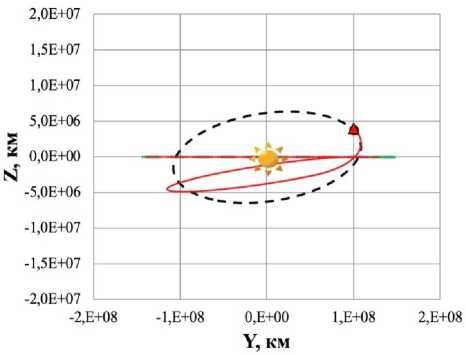
Далее проведено совместное моделирование движения ЦМ и относительно ЦМ с исполь- зованием программы номинального управления с учетом ТЭУ Получена траектория некомпланарного перелета Земля-Венера КА с неидеально отражающим СП с учетом движения относительно ЦМ КА (рис. 8).
По результатам совместного моделирования выявлено, что расстояние между КА и Венерой
Dist * достигло 205 943 км, а интеграл энергии h * равен -2,885 км2/с2, что удовлетворяет условиям моделирования. В табл. 3 приведено сравнение алгоритмов использования ЗЛОУ без учета и с учетом ТЭУ, а в табл. 4 – сравнение перелетов КА с СП с орбиты Земли к Венере без учета и с учетом ТЭУ.
X, км
б
Рис. 8. Траектория перелета КА с СП:
а ) плоскость XOY; б) плоскость YOZ (▲ — КА; • — Венера; ♦ — Солнце; – · – орбита Земли; – – орбита Венеры; –– траектория КА)
Таблица 3
Сравнение алгоритмов использования ЗЛОУ без учета и с учетом ТЭУ
|
№ п/п |
ЗЛОУ |
Длительность, сут. |
|
|
без учета ТЭУ |
с учетом ТЭУ |
||
|
1 |
наискорейшее уменьшение радиуса перигелия, ↓ rπ |
254 |
254 |
|
2 |
наискорейшее уменьшение радиуса афелия, ↓ rα |
50 |
49 |
|
3 |
наискорейшее увеличение долготы восходящего узла, ↑ Ω |
181 |
185 |
|
4 |
наискорейшее увеличение наклонения, ↑ i |
55 |
58 |
Таблица 4
Сравнение перелетов КА с СП с орбиты Земли к Венере без учета и с учетом ТЭУ
|
№ п/п |
Наименование |
Размерность |
Значение |
|
|
без учета ТЭУ |
с учетом ТЭУ |
|||
|
1 |
Ширина ТЭУ, h ТЭУ |
м |
0 |
1,062 |
|
2 |
Площадь ТЭУ, S ТЭУ |
м2 |
0 |
90,487 |
|
3 |
Дата старта, D 0 |
дд.мм.гггг |
29.07.2026 |
28.07.2026 |
|
4 |
Дата завершения перелета, Dк |
дд.мм.гггг |
19.01.2028 |
25.01.2028 |
|
5 |
Длительность перелета |
сут. |
540 |
546 |
|
6 |
Расстояние до цели, Dist |
км |
579 590 |
205 943 |
|
7 |
Интеграл энергии, h |
км2/с2 |
-1,035 |
-2,885 |
По результатам совместного моделирования движения ЦМ и относительно ЦМ КА с учетом ТЭУ выявлено, что гелиоцентрический некомпланарный перелет Земля-Венера реализуем для КА с СП с заданными проектными харак- теристиками. Найденная программа управления движением КА с неидеально отражающим СП обеспечивает выполнение всех необходимых и достаточных условий перелета, описанных в постановке задачи.
(оСМИЧЕскиЕ
АППАРАТЫ И
Заключение
Рассмотрен некомпланарный межпланетный перелет Земля-Венера КА массой 39,8 кг с неидеально отражающим СП площадью 500 м2 с учетом особенностей движения относительно ЦМ. Для проведения моделирования данного перелета сформирована математическая модель движения, состоящая из двух систем дифференциальных уравнений, описывающих движение ЦМ и относительно ЦМ. Проведено моделирование движения ЦМ КА, в результате которого 148 была получена программа номинального управле ния движением, позволяющая совершить перелет КА с СП с орбиты Земли к Венере на расстояние
Том 4
579 226 км за 539 суток. Поскольку основной задачей было провести моделирование движения с учетом особенностей движения относительно ЦМ, было установлено, что для совершения перелета Земля-Венера на СП необходимо установить ТЭУ площадью 90,487 м2, что составило около 18 % от общей площади СП. По результатам совместного моделирования движения ЦМ и относительно ЦМ выявлено, что длительность перелета увеличилась и составила 546 суток, а расстояние между КА и Венерой, наоборот, сократилось и достигло 205 943 км. Таким образом, гелиоцентрический некомпланарный перелет Земля-Венера реализуем для КА с СП с заданными проектными характеристиками.
Список литературы Моделирование некомпланарного межпланетного перелета космического аппарата с солнечным парусом с учетом особенностей движения относительно центра масс
- Поляхова Е. Н. Космический полет с солнечным парусом. М. : Книжный дом «ЛИБРОКОМ», 2011. 320 с.
- Макаренкова Н. А. Управление пространственным положением солнечного паруса // Труды МАИ. 2017. № 94. С. 1–21.
- Макаренкова Н. А. Управление кинетическим моментом солнечного паруса путем изменения отражательной способности его поверхности // Труды МАИ. 2018. № 98. С. 1–25.
- Borggrafe A., Heiligers J., Ceriotti M., McInnes C.R. Optical Control of Solar Sails using Distributed Reflectivity // Proceedings of AIAA SciTech 2014. 2014. pp. 1–14.
- Borggrafe A., Heiligers J., Ceriotti M. Inverse problem for shape control of flexible space reflectors using distributed solar pressure // Smart Materials and Structures. 2014. vol. 23. no. 7. pp. 1–18.
- Хабибуллин Р. М. Программа управления для некомпланарного гелиоцентрического перелета к Венере космического аппарата с неидеально отражающим солнечным парусом // Вестник Самарского университета. Аэрокосмическая техника, технологии и машиностроение. 2019. Т. 18. № 4. С. 117–128. doi: 10.18287/2541- 7533-2019-18-4-117-128.
- McInnes C. R. Solar sailing: technology, dynamics and mission applications // Springer Science & Business Media. 2013. 296 p.
- Khabibullin R. M. Set of controlled motion models for a spacecraft equipped with an non-perfectly reflecting frame type solar sail for heliocentric flight // AIP Conf. Proc. 2019. vol. 2171. no. 1. pp. 050005-1–050005-9. doi: 10.1063/1.5133197.
- Mori O., Sawada H., Funase R., Morimoto M., Endo T., Yamamoto T., Tsyda Y., Kawakatsu Y., Kawaguchi J. First Solar Power Sail Demonstration by IKAROS // Transactions of the Japan Society for Aeronautical and Space Sciences, Aerospace Technology. 2010. pp. 1–6.
- Хабибуллин Р. М., Старинова О. Л. Алгоритм управления пространственным движением космического аппарата с неидеально отражающим солнечным парусом на базе законов локально-оптимального управления для совершения гелиоцентрического перелета Земля - Марс // Инженерный журнал: наука и инновации. 2020. № 8 (104). doi: 10.18698/2308-6033-2020-8-2006.
