Моделирование нестационарного контакта в подшипнике качения

Автор: Иванов В.А., Еркаев
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Математика, механика, информатика
Статья в выпуске: 3 т.16, 2015 года.
Бесплатный доступ
Рассмотрена задача нестационарного гидродинамического контакта ролика с упругим слоем с учетом прогиба поверхности, а также влияния давления на коэффициент вязкости. Зависимость вязкости от давления задана экспоненциальной функцией. В работе использовался итерационный метод численного решения уравнения Рейнольдса совместно с интегральным уравнением связи прогиба поверхности с давлением в смазочном слое. Показано, что вертикальное перемещение ролика вызывает дополнительное существенное возрастание давления в смазочном слое, пропорциональное вертикальной скорости. Коэффициент линейной зависимости несущей способности от вертикальной скорости назван коэффициентом демпфирования. В результате расчетов получены зависимости несущей способности и коэффициента демпфирования смазочного слоя от величины минимального зазора между роликом и пластиной. С использованием найденных функций изучен переходный процесс установления стационарного режима при резком изменении внешней нагрузки. Найдено характерное время установления и определены временные вариации пиковых значений давления. Исследовано влияние пьезокоэффициента вязкости на максимальные значения давления, достигаемые в процессе установления. Найдено критическое значение пьезокоэффициента, при котором эффект возрастания давления, обусловленный увеличением вязкости, компенсируется влиянием деформации упругой поверхности.
Нестационарный режим, контактное взаимодействие, смазочный слой
Короткий адрес: https://sciup.org/148177456
IDR: 148177456 | УДК: 628.822
Simulation of non-steady contact in rolling bearings
This article deals with the problem of non-steady hydrodynamic contact of a roller with finite size elastic plate. The lubricant viscosity coefficient is assumed to be exponential function of the pressure. For this problem, an iterative numerical method was elaborated to solve the 2-D Reynolds’ equation consistently with the integral equation of relationship between the surface deflection and pressure distribution in the lubrication layer. A normal motion of the roller causes additional pressure enhancement in the lubrication layer, which is proportional to the normal velocity. Coefficient of proportionality is called as damping coefficient. Carrying capacity and damping coefficient are determined from numerical solution as functions of minimal distance between the roller and plate. The obtained functions were used for modeling of the roller oscillations due to sudden variations of the external loading. Characteristic relaxation time and temporal variations of the pressure maximum are determined. Dependence of the pressure maximum on a special piezo-coefficient was investigated, which is a parameter of the exponential function approximating relationship between viscosity and pressure. Higher values of the piezo-coefficient yield larger values of the pressure maximum in the lubrication layer during the relaxation period. However, deflection of the body surfaces makes an opposite effect on the pressure. Therefore behavior of the pressure maximum is determined by two opposite factors related to the viscosity piezo-effect and surface deformations. From numerical simulations, a critical value of the piezo-coefficient is found when the influence of the piezo-coefficient is compensated by that of deformation of the elastic plate.
Текст научной статьи Моделирование нестационарного контакта в подшипнике качения
Введение. Расчет упруго-гидродинамического контакта ролика с деформируемой поверхностью является довольно сложной задачей, так как требует совместного решения уравнений гидродинамики в смазочном слое и уравнений упругости в деформируемом теле [1–10]. Эта задача связана с проблемой моделирования подшипников качения, которые широко используются в авиационных и ракетных двигателях. При работе подшипниковых узлов часто возникают вибрации, связанные с резкими изменениями нагрузки. Это особенно заметно в моменты запуска и остановки механизма, а также при воздействии переменной внешней силы. Эти вибрации существенно влияют на работу подшипника, увеличивая его износ и сокращая срок службы. Поэтому моделирование нестационарного режима работы подшипникового узла является важной задачей. Целью данной работы является анализ нестационарных режимов работы роликового подшипника качения в случае переменной внешней нагрузки.
Описание метода расчета. Рассмотрим контактное взаимодействие цилиндрического ролика с движущейся пластиной, покрытой слоем смазочного материала (рис. 1). Так как радиус ролика очень мал по сравнению с радиусом кольца, по которому он катится, то можно приближенно принять внешнее кольцо подшипника плоской пластиной [7].
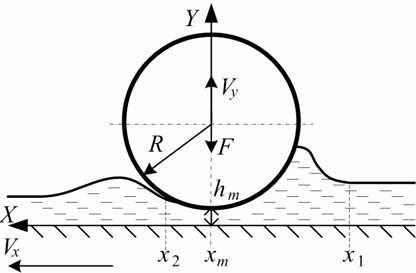
Рис. 1. Схема расположения ролика, пластины и слоя жидкого смазочного материала
Распределение давления в смазочном слое определяется из решения уравнения Рейнольдса:
af,з ap) fah 2 ah h exp(-a P) = 6цпV + axl axJ 0 lax vat где P – давление в смазочном слое; V – скорость движения пластины; ц0 - динамическая вязкость масла при нормальном давлении; ah / at - вертикальная скорость ролика; а - пьезокоэффициент давления [11–13]. Ось x ориентирована в направлении движения пластины. Данное решение было подробно рассмотрено ранее в [14], поэтому для сравнения рассмотрим случай контакта бесконечно жесткого ролика с упругой пластиной без учета изменения вязкости в смазочном слое. В этом случае уравнение Рейнольдса имеет вид
= 6 ц V
a h 2 ah)
---1---I . ax v at)
В предположении, что площадка контакта цилиндра и плоскости мала по сравнению с радиусом кривизны R , имеем следующее выражение для толщины слоя смазочного материала [2]:
h = h m + ( x - x m ) 2 / ( 2 R ) , (3)
где h m – минимальная толщина смазочного слоя; x m – координата точки минимального зазора.
Граничные условия в рассматриваемом случае имеют следующий вид [1; 2]:
P ( x 1 ) = P ( x 2 ) = Ц ( x 2 ) = 0,
где x 1 и x 2 – входная и выходная границы смазочного слоя.
Для удобства решения задачи вводим безразмерные переменные:
x = ( x - x m )/\h mR ,
q = Ph m .5 / ( 6 ц V^ ) ,
t = tV / 4Rh m ,
V y hR
£ = ,
V h
m
преобразуем исходное уравнение Рейнольдса (2) к более простому виду:
H5 1 + 2 s , a x
где H ( x ) = 1 + 5c 2 /2.
Положения входной и выходной границ будем характеризовать безразмерными параметрами a и c . Значение параметра a зависит от количества смазки. В случае обильной смазки полагаем a = -« [2-4].
Интегрируя уравнение (6) и используя нулевое граничное условие (5) для производной функции давления при x = c, получаем дифференциальное урав- нение первого порядка:
a q = H ( 5с ) - H ( c ) 2 e ( xc - c ) a xx H ( xc ) 3 H ( x ) 3 = ( 5c - c ) /2 2 s ( 5c - c )
( 1 + x 2 /2 ) 3 ( 1 + x 2 /2 ) 3
Решение уравнения (7) зависит от безразмерного параметра s , который связан с нормальной скоростью перемещения ролика. Интегрируя уравнение (7) для различных значений ε, находим распределение давления в смазочном слое, соответствующее различным нормальным скоростям ролика.
По найденному распределению давления определяем безразмерную несущую способность, являющуюся функцией параметра ε:
W '( s ) = j q ( x , s ) dx . (8)
a
Расчеты показывают, что зависимость несущей способности от ε очень близка к линейной (рис. 2), и ее можно записать в следующем виде:
W ' = W o + A s , (9)
где постоянные коэффициенты W 0 ' и A равны 0,401 и 1,125 соответственно.
График зависимости несущей способности W' от нормальной скорости ε в безразмерных единицах представлен на рис. 2.
С учетом соотношений (5) преобразуем выражение (8) к размерному виду:
Принимая h 0 в качестве базового зазора, вводим безразмерные переменные:
h m = h ' h 0 , t = t ' т ,
A Rh 0
T= ,
VW 0'
W = w '6 ^ VR е + a 6 ^ 2 v .
3/2 y m hm
Здесь первое слагаемое выражает зависимость стационарной несущей способности от зазора при нулевой нормальной скорости
Используя нормировки (15), приводим уравнение динамики к безразмерному виду:
d 2 h '1 dh '1
m --T +--w—- 77 = -1, dt'2 h '3/2dt'h'
mV 2 ( W 0' ) 2
m =----=------ .
A 2 FR
W 0
=. V 0 hm
а второе слагаемое учитывает влияние нормальной скорости. Коэффициент перед скоростью будем называть коэффициентом демпфирования X :
X = A
6 ц R 3/2
h
3/2 m
Движение ролика по нормали определяется уравнением динамики md^hm + X(hm) dh' - Wo(hm) = - F,(13)
dt2
где m – масса ролика; F – внешняя нагрузка.
С учетом зависимостей (11), (12) уравнение (13) принимает следующий вид:
+ A 6 ^ - W= - F.(14)
dt 2 hm 3/2 dt 0 hm
Полагая равными нулю производные по времени, определяем равновесное значение зазора:
6 ц VRW 0 F
Уравнение (16) определяет зависимость зазора от времени в процессе установления стационарного режима. Характерное время переходного процесса характеризуется параметром т .
Анализ влияния деформаций и зависимости вязкости от давления. Далее переходим к более реалистичной задаче с учетом прогиба поверхности и переменности вязкости, зависящей от давления в смазочном слое. Для расчетов используем следующие числовые параметры: hm = 0,00000035 м, ц = 0,024 Па^с, α = 0,75∙10–8 1/Па – пьезокоэффициент вязкости, V = 7 м/с, R = 0,005 м (за основу взят подшипник 32114 серии [15]). Для моделирования примем, что материал пластины имеет следующие механические свойства: E = 2,1∙1011 Па – модуль упругости (сталь), m = 0,3 – коэффициент Пуассона.
Решая уравнение (7) при ε = 0, получаем распределение давления в смазочном слое (рис. 3), которое далее используем для определения прогиба упругой поверхности.
При проведении итерационного расчета прогиба поверхности применяем найденную ранее функцию податливости пластины [14]. График этой функции показан на рис. 4. Значения функции нормированы к её максимальному значению: K max = 3,267·10–15 Па–1.
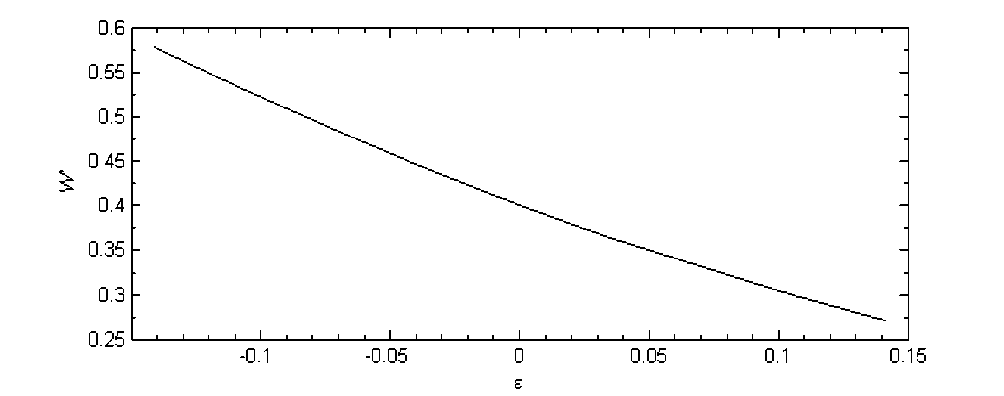
Рис. 2. Зависимость несущей способности от вертикальной скорости в безразмерных единицах
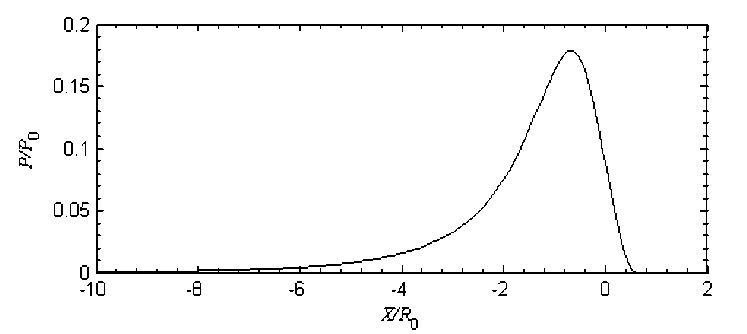
Рис. 3. Распределение давления в смазочном слое
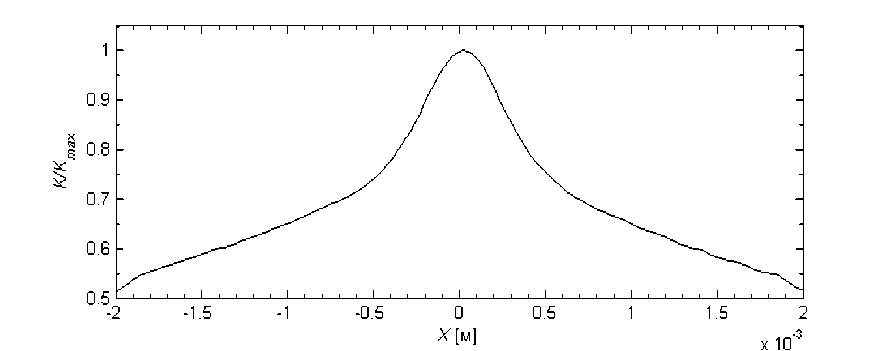
Рис. 4. График функции податливости
Исследуем влияние прогиба поверхности и пьезокоэффициента вязкости на максимум давления в смазочном слое. Данные расчетов, в которых пьезокоэффициент был фиксирован и изменялась лишь величина зазора, приведены в табл. 1. Данные показывают, что пьезокоэффициент вязкости начинает значительно влиять на пик давления только при очень малых зазорах ( h < 3∙10–7). Влияние деформации упругой поверхности также становится выраженным лишь при малых зазорах.
Также рассмотрим влияние пьезоэффекта на пик давления в смазочном слое при фиксированном зазоре. Для этого выполним серию расчетов с разными значениями пьезокоэффициента. Согласно результатам расчетов, представленным в табл. 2, при значении α = 1,1∙10–8 1/Па влияние пьезокоэффициента на рост пика давления полностью компенсируется прогибом поверхности.
Далее проводим еще одну серию вычислительных экспериментов для нахождения коэффициента демпфирования λ с учетом влияния прогиба поверхности. Для этого рассчитаем величину несущей способности W для различных значений минимального зазора с учетом как положительных, так и отрицательных значений вертикальной скорости. При этом в каждом расчете используем итерационный метод. Зависимость несущей способности W от вертикальной скорости Vy показана на рис. 5. Зависимость контактной нагрузки от минимально зазора при нулевой вертикальной скорости показана на рис. 6.
Коэффициент демпфирования λ для различных значений минимального зазора определяется как тангенс угла наклона касательной к кривой, выражающей зависимость несущей способности W от нормальной скорости (рис. 5). Используя рассчитанный для различных значений h m массив значений λ и применяя сплайновую интерполяцию, определяем функцию λ( h m ), показанную на рис. 7. Также на рис. 7 показано изменение коэффициента демпфирования для аналитического решения (без учета деформаций и пьезоэффекта).
Найденные функции демпфирования и несущей способности подставляем в уравнение (13), выполняем численное интегрирование и получаем зависимость зазора от времени, а также из уравнения (7) находим соответствующие распределения давления в смазочном слое в различные моменты времени. На рис. 8 показан график изменения максимума давления с учетом коэффициента демпфирования и прогиба поверхности. На этом же рисунке для сравнения представлен аналогичный график максимума давления, полученный без учета пьезокоэффициента давления и прогиба поверхности. Расчет был выполнен для базового зазора 0,00000035 м.
Таблица 1
|
Минимальный зазор в смазочном слое hm , м |
Максимальные P давление в смазочном слое |
||
|
Без учета пьезоэффекта и прогиба, 107 Па |
Только с учетом пьезоэффекта, 107 Па |
С учетом прогиба и пьезоэффекта, 107 Па |
|
|
0,000001 |
1,26 |
1,33 |
1,23 |
|
0,0000005 |
3,59 |
4,18 |
3,48 |
|
0,00000035 |
6,13 |
8,2 |
5,6 |
|
0,00000025 |
10,02 |
19,1 |
8,37 |
Таблица 2
|
Пьезокоэффициент α, 10–8 1/Па |
Максимальные P давление в смазочном слое |
||
|
Без учета пьезоэффекта и прогиба, 107 Па |
Только с учетом пьезоэффекта, 107 Па |
С учетом прогиба и пьезоэффекта, 107 Па |
|
|
2,3 |
6,13 |
Нет решения |
10,2 |
|
1,6 |
24,5 |
7,54 |
|
|
1,4 |
13,24 |
6,89 |
|
|
1,1 |
10,6 |
6,18 |
|
|
0,75 |
8,2 |
5,6 |
|
|
0,35 |
6,89 |
5,08 |
|
Максимальные давления в разных вариантах расчета (α = 0,75∙10–8 1/Па, Vy = 0)
Влияние пьезокоэффициента на давление в смазочном слое ( h = 0,00000035 м, Vy = 0)
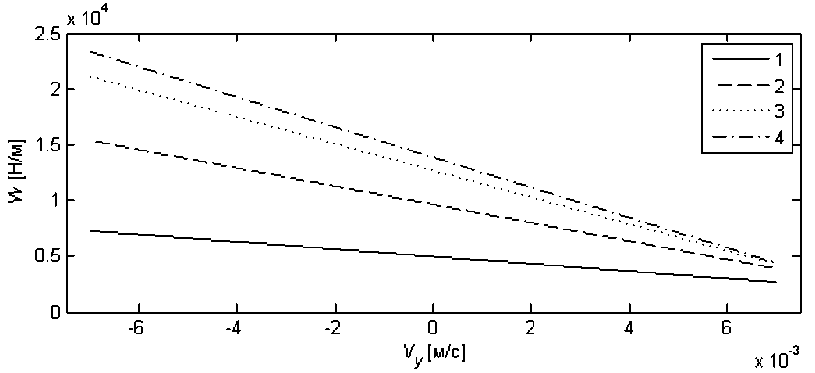
Рис. 5. Зависимость контактной нагрузки W от вертикальной скорости Vy :
1 – h = 0,000001 м; 2 – h = 0,0000005 м; 3 – h = 0,00000035 м; 4 – h = 0,00000025 м
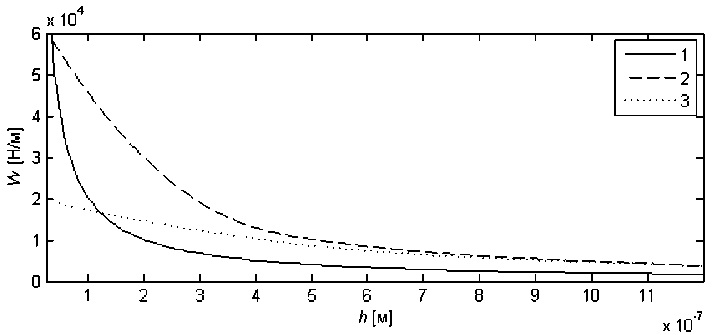
Рис. 6. Зависимость контактной нагрузки W от минимального зазора в смазочном слое hm :
1 – аналитическое решение; 2 – с учетом только пьезоэффекта;
3 – с учетом прогиба поверхности и пьезоэффекта
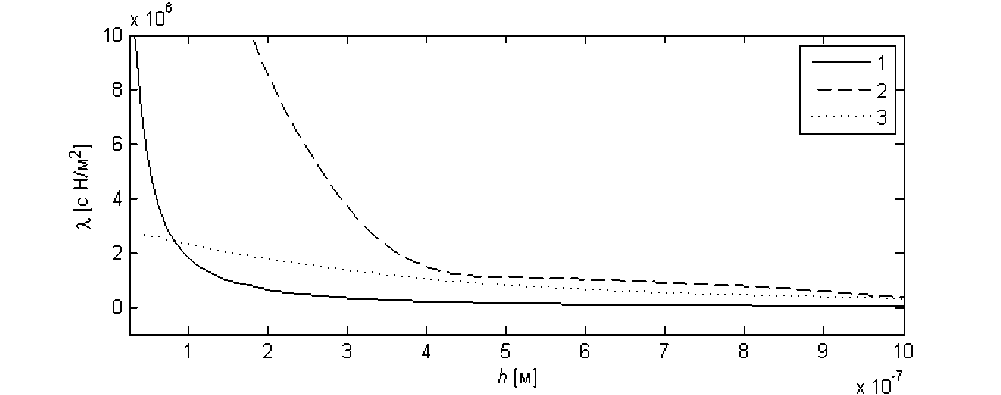
Рис. 7. Зависимость коэффициента демпфирования λ от минимального зазора hm :
1 – аналитическое решение; 2 – с учетом только пьезоэффекта; 3 – с учетом прогиба поверхности и пьезоэффекта
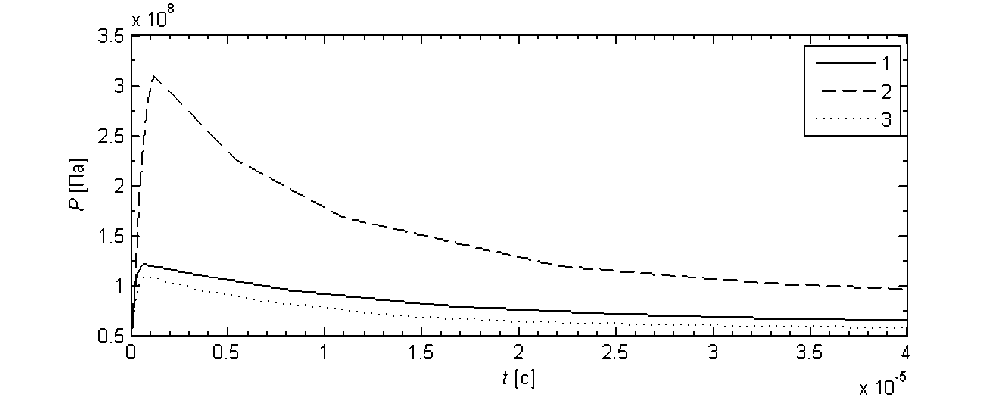
Рис. 8. Изменение пика давления в течение времени:
1 – аналитическое решение; 2 – с учетом только пьезоэффекта;
3 – с учетом прогиба поверхности и пьезоэффекта
Заключение. Решена задача нестационарного упруго-гидродинамического контакта ролика с пластиной с учетом прогиба поверхности, а также влияния давления на коэффициент вязкости. Для этого использовался разработанный ранее итерационный метод численного решения уравнения Рейнольдса совместно с интегральным уравнением связи прогиба поверхности с давлением в смазочном слое. В результате расчетов получены зависимости несущей способности и коэффициента демпфирования смазочного слоя от величины минимального зазора между роликом и пластиной. С использованием найденных функций изучен переходный процесс установления стационарного режима. Исследовано влияние пьезокоэффициента вязкости на пик давления, достигаемый в процессе установления. Найдено критическое значение пьезокоэффициента, при котором эффект возрастания давления, обусловленный увеличением вязкости, компенсируется влиянием деформации упругой поверхности.
Acknowledgements. The work was supported by grant of Russian Foundation for Basic Research 15-0508879.
Список литературы Моделирование нестационарного контакта в подшипнике качения
- Kodnir D. S. Kontaktnaya gidrodinamika smazki detaley mashin . Moscow, Mashinostroenie Publ., 1976, 304 p.
- Galakhov M. A., Usov P. P. Differentsial’nye i integral’nye uravneniya matematicheskoy modeli teorii treniya . Moscow, Nauka. Fiz.-Mat. Lit. Publ., 1990, 280 p.
- Galakhov M. A., Gusaytnikov P. B., Novikov A. P. Matematicheskie modeli kontaktnoy gidrodinamiki . Moscow, Nauka Publ., 1985, 294 p.
- Terent’ev V. F., Erkaev N. V., Dokshanin S. G. Tribonadezhnost’ podshipnikovykh uzlov v prisutstvii modifitsirovannykh smazochnykh kompozitsiy . Novosibirsk, Nauka Publ., 2003, 142 p.
- Venner C. H., Lubrecht A. A. MultiLevel methods in lubrication. Amsterdam, Elsevier Publ., 2000, 400 p.
- Venner C. H. Multilevel solution of the EHL line and point contact problems. PhD thesis, University of Twente. Endschende. 1991, 318 p.
- Venner C. H., Lubrecht A. A. Numerical simulation of a transverse ridge in a circular EHL contact under rolling sliding. Trans. ASME J. Tribol 1994, P. 751-761.
- Anuradha P., Kumar P. EHL line contact central and minimum film thickness equations for lubricants with linear piezoviscous behavior. Tribol, 2011, Int. 44,P. 1257-1260.
- Besportochnyy A. I. . Trudy MFTI. 2013, Vol. 5, No. 2, P. 4-12 (In Russ.).
- Besportochnyy A. I. . Nauchnyy vestnik MGTU GA. 2011, No. 163,
- P. 138-143 (In Russ.).
- D’AgostinoV., Petrone V., Senatore A. Effects of the lubricant piezo-viscous properties on EHL line and point contact problems, Tribol Lett 2013, Int 49, P. 385-396. DOI 10.1007/s11249-012-0079-5.
- Moes H., Lubrication and beyond. Twentte Universiti Press. Enschede. The Netherlands. 2000, 366 p.
- Lubrecht A. A. The numerical solution of the elasto-hydrodynamicallylubricated line-and point contact problem, using multigrid techniques. PhD Dissertation. Twente University. Netherlands. 1987, 219 p.
- Ivanov V. A., Erkaev N. V. . Vestnik SibGAU. 2014, No. 4(56), P. 48-54 (In Russ.).
- Naryshkin V. N., Korostashevskiy R. V. Podshipniki Podshipniki kacheniya. Spravochnik-katalog. . Moscow, Mashinostroenie Publ., 1984, 280 p.
