Моделирование окружающей среды в системе поддержки принятия решений по управлению транспортными потоками на автомобильных дорогах

Автор: Кудрявцева Екатерина Юрьевна, Солодовников Андрей Дмитриевич
Журнал: Горные науки и технологии @gornye-nauki-tekhnologii
Статья в выпуске: 7, 2010 года.
Бесплатный доступ
Рассматривается целесообразность разработки системы поддержки принятия решений по управлению транспортными потоками, позволяющей пользователю моделировать и анализировать транспортное движение. Особое внимание уделяется моделированию окружающей среды, как фактору влияющему на транспортное движение.
Система поддержки принятия решений, моделирование, окружающая среда, транспортные потоки, автомобильные дороги
Короткий адрес: https://sciup.org/140215178
IDR: 140215178
Текст научной статьи Моделирование окружающей среды в системе поддержки принятия решений по управлению транспортными потоками на автомобильных дорогах
Бурный процесс развития автомобильного транспорта с каждым годом охватывает все большее число стран, постоянно увеличивается автомобильный парк и объёмы перевозок, количество участников дорожного движения. Параллельно с ростом количества транспортных средств увеличиваются количество и масштабы проблем, связанных с транспортными потоками на дорожных сетях (перегруженность дорог, неравномерное распределение потоков во времени, нехватка парковочных мест, проблемы регулирования движения, состояние дорожного полотна, неэффективная конструкция дорожных сетей, небезопасность движения и т.д.). Для решения этих вопросов необходим комплексный анализ данной области, учет всех факторов, влияющих на транспортное движение, таких как конструкция дороги, система регулирования транспортного движения, концентрация автомобилей, факторы окружающей среды и т.д. Комплексный анализ такого большого количества факторов практически невозможен без применения современных технологий, поэтому возникает необходимость в разработке компьютерных систем, осуществляющих моделирование и анализ транспортных потоков.
Задача моделирования объектов из различных предметных областей в настоящее время является приоритетной в большинстве практических направлений использования информационных технологий. Большой интерес представляет создание систем поддержки принятия решений. Для анализа дорожного движения на автомобильных дорогах и решения проблем, связанных с ним, необходима система поддержки принятия решений по управлению транспортными потоками на автомобильных дорогах.
Главной особенностью технологии систем поддержки принятия решений (СППР) является качественно новый метод организации взаимодействия человека и компьютера. Выработка решения, что является основной целью этой технологии, происходит в результате некоторого процесса, в котором участвуют СППР в роли вычислительного звена и объекта управления и человек – лицо, принимающее решение (ЛПР), задающее входные данные и оценивающее полученный результат вычислений на компьютере [2]. Также можно указать ряд отличительных характеристик технологии СППР:
-
• ориентация на слабо структурированные (формализованные) задачи (большое количество факторов взаимосвязанных по различным критериям, влияющих на движение);
-
• направленность на непрофессионального пользователя компьютера (за счет интуитивно понятного графического интерфейса, осуществляющего связь между ЛПР и системой);
-
• сочетание традиционных методов обработки компьютерных данных с возможностями математических и графических моделей и методами решения задач на их основе (3D моделирование движения, дороги и окружения и математические расчеты параметров, характеризующих движение);
-
• высокая адаптивность, обеспечивающая возможность приспосабливаться к различным требованиям пользователя (широкий спектр различных параметров, определяемых пользователем).
СППР по управлению транспортными потоками на автомобильных дорогах представляет собой систему, целью которой является моделирование транспортного движения и анализ факторов влияющих на него, одним из них является фактор окружающей среды. Окружающая среда включает в себя рельеф, погодные условия, растительность и сооружения, и все это непосредственно влияет как на автомобилиста, так и на характер его управления транспортным средством и на все транспортное движение в целом, поэтому эти внешние факторы должны учитываться в СППР.
Рассмотрим внешние факторы:
-
• рельеф – влияет на геометрию дороги (кривизна, подъёмы, спуски, протяженность, радиусы кривизны поворотов и т.д.), на видимость и соответственно на характер передвижения;
-
• строения и растительность – оказывают влияние на видимость;
-
• погодные и временные факторы – включают в себя такие характеристики, как время года, суток, недели, температура, освещенность, влажность, осадки, туман и т.д., влияющие на видимость, на распределение потоков машин, на безопасность передвижения и т.д.
Доказать влияние факторов окружающей среды можно при помощи статистических данных ДТП.
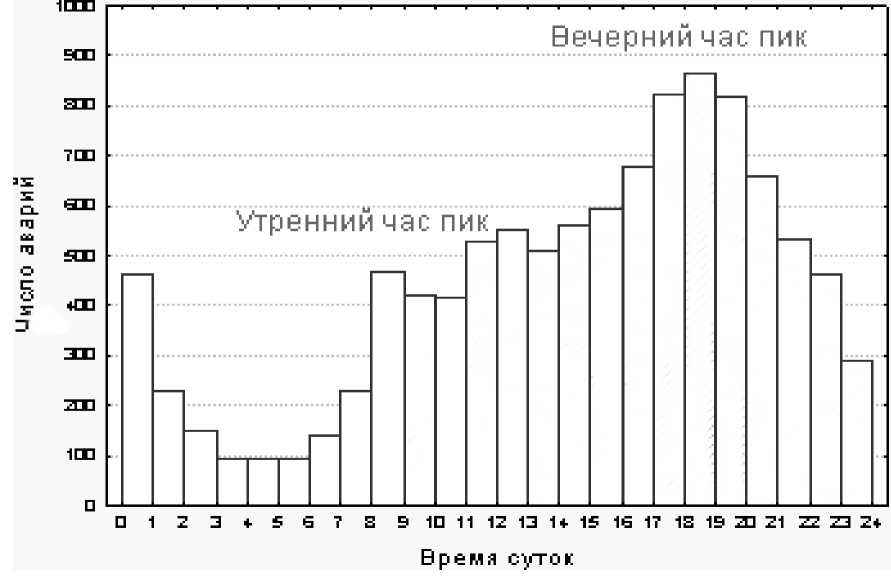
Рис. 1 Гистограмма зависимости количества аварий от времени суток
На рис.1 показана гистограмма зависимости количества ДТП от времени суток, как мы видим наименьшее количество аварий ночью в промежутке времени с 3:00 до 4:00 часов, наибольшее во время вечернего час пика с 17:00 до 20:00. Это влияние временных условий. Для характеристики влияния рельефа приведем данные исследований, проведённых в Норвегии: было выяснено, что подъёмы более безопасны, с точки зрения ДТП, чем спуски. На подъёмах количество ДТП примерно на 7% ниже, чем на соответствующем спуске[1].
При разработке СППР важную роль играет исследование предметной области, а именно основных процессов, происходящих при исследовании дорожного движения. При помощи CASE- средств была проанализирована предметная область, выявлены основные этапы функционирования системы. Построена модель IDEF0, которая отражает основные процессы в системе, входные и выходные потоки, управляющие факторы и устройства. На рис.2. показан уровень декомпозиции процесса «Моделировать окружение».
Система моделирования окружающей среды – это лишь отдельный модуль общей системы СППР по управлению транспортными потоками. Система представляет собой комплекс программных модулей, выполняющих функции моделирования транспортного движения на мосту, на перекрестке, на парковке и т.п., причём все параметры, характеризующие эти компоненты, должны определяться ЛПР.
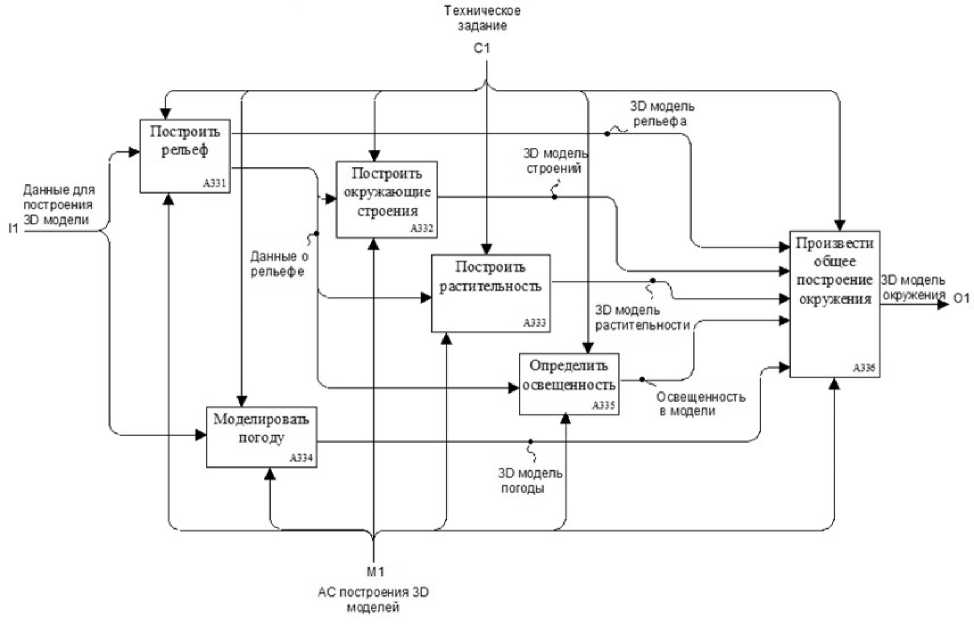
Рис. 2. Диаграмма IDEF0
В систему должна входить общая база данных, содержащая все объекты моделируемой системы, как определенные ЛПР, так системные. Преимущество 3D моделирования окружающей среды да и всей системы поддержки принятия решения заключается в том, что пользователю демонстрируется транспортное движение в моделях приближенных к реальным объектам, что существенно облегчает восприятие и последующий анализ.
Список литературы Моделирование окружающей среды в системе поддержки принятия решений по управлению транспортными потоками на автомобильных дорогах
- Интенет-источник: http://www.madi.ru/spravochnik/part3_1_13.html
- Интенет-источник: http://www.masters.donntu.edu.ua/2002/foreign/mamoun/index.htm
