Моделирование перелёта межорбитального буксира с солнечной электроракетной двигательной установкой

Автор: Горшков Лев Капитонович, Мосин Дмитрий Александрович, Синявский Виктор Васильевич, Уртминцев Игорь Александрович
Журнал: Космическая техника и технологии @ktt-energia
Рубрика: Динамика, баллистика, управление движением летательных аппаратов
Статья в выпуске: 1 (40), 2023 года.
Бесплатный доступ
В статье представлены результаты работы по определению технических характеристик межорбитального космического буксира, оснащённого электро-ракетными двигателями и солнечной энергоустановкой. Рассмотрен конструкционный облик космического буксира с электроракетной двигательной установкой мощностью до 200 кВт и возможные варианты энергетической системы на основе солнечной и аккумуляторной батарей. Приведены результаты расчётов параметров четырёх вариантов транспортной операции для обеспечения грузопотока на орбиты высотой ~20 000 км с возвращением космического буксира на опорную орбиту. Показано, что наиболее рациональной является конструкция буксира, не имеющая аккумуляторной батареи для работы электроракетной двигательной установки на теневых участках траектории. При этом транспортную операцию целесообразно выполнять по траектории с минимальной длительностью теневых участков.
Межорбитальный космический буксир, солнечная энергоустановка, электроракетный двигатель, электроракетная двигательная установка, межорбитальная транспортная операция
Короткий адрес: https://sciup.org/143179911
IDR: 143179911 | УДК: 629.78.064.56.01
Simulating transfer of a solar-powered electrically propelled orbital transfer vehicle
The paper presents results of the work to define technical characteristics of a solar-powered electrically-propelled orbital transfer vehicle. It discusses an orbital transfer vehicle concept which includes an up to 200 kW electrical propulsion system and power system options based on solar arrays and storage batteries. It provides results of parameter calculations for four options of a transfer operation supporting cargo traffic to ~20 000 km orbits with return of the transfer vehicle to its parking orbit. It is shown that the optimal vehicle design is the one that does not have a storage battery to support the operation of the electrical propulsion system during eclipsed portions of its trajectory. However, it is desirable to perform the transfer operation using a trajectory with minimal duration of eclipsed portions.
Текст научной статьи Моделирование перелёта межорбитального буксира с солнечной электроракетной двигательной установкой
Задача создания эффективных космических транспортных систем является одним из приоритетных направлений реализации проектов по исследованию и освоению околоземного космического пространства и Солнечной системы, включая выведение телекоммуникационных и навигационных систем на высокие околоземные орбиты [1–3].
Возможным направлением решения этой задачи является создание эффективных космических буксиров с энергодвигательными установками на основе электроракетных двигателей (ЭРД), обеспечивающих реализацию транспортных операций с минимальными затратами рабочего тела (РТ). Использование маршевой электроракетной двигательной установки (ЭРДУ) благодаря значительно большему удельному импульсу позволяет существенно уменьшить массовые затраты на межорбитальные перелёты и добиться увеличения доли полезной нагрузки в стартовой массе космических аппаратов (КА). В настоящее время рассматриваются варианты транспортных систем с ЭРДУ, использующими для своего электроснабжения солнечные (СЭУ) [1–6] и ядерные энергоустановки (ЯЭУ) [7]. Однако основное направление этих исследований касается, главным образом, разработки конструкционного облика аппаратов, а также выбора и оптимизации траекторий для полёта на геостационарную орбиту, к Луне и для межпланетных полётов.
В данной работе рассмотрена простейшая транспортная задача доставки полезной нагрузки с помощью межорбитального буксира (МБ), оснащённого солнечной электроракетной двигательной установкой (СЭРДУ), с опорной орбиты (ОО) высотой 300 км на компланарную рабочую орбиту (РО) высотой 20 000 км. Основное внимание уделено влиянию различного состава энергосистемы буксира и режимов её работы на параметры перелётов. Рассмотрены варианты комплектации энергосистемы из солнечных батарей (СБ), работающих совместно с аккумуляторными (АБ) для электропитания ЭРДУ на теневых участках траектории полёта, и без АБ.
В первом разделе статьи выполняются приближённые оценки энергозатрат на перелёт с учётом указанных параметров, и на их основе определяются близкие к оптимальным проектные параметры буксира. Далее на основе численного интегрирования уравнений движения МБ подробно исследуется баллистика перелёта, включая возвращение на ОО.
Моделируется режим двухстепенной ориентации СБ в направлении на Солнце и учитывается температура панелей СБ на основе уравнений теплового баланса при определении аэродинамического сопротивления. Для упрощения задачи принимается простейшая конструкция буксира, включающая только основные элементы энергодвигательной системы.
общая характеристика задачи полёта МБ с СЭрду
Полёт МБ с СЭРДУ имеет несколько отличительных признаков, отражающих специфику двигательной установки такого типа [8–11]. Особенно следует отметить важные, но малоизученные факторы, сопровождающие полёт в ближнем космосе:
-
• необходимость учёта реального поля тяготения Земли, вызывающего долгопериодические возмущения траектории полёта КА;
-
• аэродинамическое сопротивление верхней атмосферы Земли (выше 120 км), особенно значимое для КА, оснащённых СЭУ для электропитания ЭРДУ.
Как известно [12], значение оптимального удельного импульса ЭРДУ существенно зависит от характеристической скорости транспортной операции Vх . Основной причиной возникающей трудности является сложность простого учёта сил аэродинамического сопротивления и влияние нецентральности гравитационного поля.
В общем случае межорбитальный перелёт может подразумевать изменение высоты и наклонения орбиты КА. Изменение наклонения орбиты требует формирования компоненты вектора тяги перпендикулярно мгновенной плоскости траектории в направлении изменения плоскости орбиты (нормальная компонента тяги). В этом общем случае задача расчёта транспортной операции ещё более усложняется в связи с необходимостью выбора оптимальной программы управления полётом КА. Поэтому далее рассматривается межорбитальный перелёт с постоянным направлением вектора тяги ЭРДУ по вектору скорости КА. Такой перелёт близок к компланарному и наиболее прост в моделировании.
Решение задачи перелёта межорбитального буксира с СЭРДУ включает в себя:
-
• моделирование конструкции буксира;
-
• построение баллистической модели полёта буксира с СЭРДУ.
расчётная модель буксира с солнечной энергоустановкой
Режимы работы энергосистемы МБ с СЭРДУ. Для поддержания непрерывного энергоснабжения бортовых потребителей на теневой стороне, в т. ч. и для электропитания ЭРДУ, в состав энергосистемы буксира можно включить АБ. В наиболее простом случае энергосистема буксира, оснащённого СЭУ и АБ, функционирует в следующих режимах:
а. Буксир освещается Солнцем:
а1. Энергия от СБ расходуется на электропитание ЭРДУ мощностью Р ЭРДУ .
а2. Энергия от СБ расходуется на электропитание технических систем буксира мощностью Р ТС .
а3. Энергия от СБ расходуется на зарядку АБ мощностью Р ЭРДУ для электропитания ЭРДУ на теневом участке.
а4. Энергия от СБ расходуется на зарядку АБ мощностью Р ТС для электропитания технических систем буксира на теневом участке.
После достижения заданного уровня энергетической ёмкости АБ Е АБ0 зарядка отключается.
Б. Буксир в тени Земли:
Б1. Энергия от АБ расходуется на электропитание технических систем буксира Р ТС .
Б2. Энергия от АБ расходуется на электропитание ЭРДУ мощностью Р ЭРДУ .
При отсутствии АБ для энергоснабжения ЭРДУ пункты а3 и Б2 исключаются. На теневом участке орбиты работа ЭРДУ прекращается, и буксир совершает инерциальный полёт по оскулирующей орбите, рассчитанной по фазовым координатам точки останова работы ЭРДУ, до выхода на освещённый участок.
Энергетическая модель МБ с СЭРДУ. Основным потребителем электроэнергии, вырабатываемой СЭУ, является ЭРДУ, включающая n ЭРД двигателей с заданными тягово-энергетическими характеристиками: тягой F ЭРД , удельным импульсом I ЭРД и КПД η ЭРД . Соответственно, электрическая мощность ЭРД составит
ЭРД ЭРД . ЭРД
,
Э РД m ЭРД
ηЭРД ηЭРД где m. ЭРД — массовый расход РТ ЭРД.
В качестве РТ ЭРД далее рассматривается ксенон (Хе). Полная мощность ЭРДУ составит
Р = п Р
ЭРДУ n ЭРД ЭРД
РТ ЭРД
Т ДУ 2 η ЭРД
где M РТ — запас массы РТ для работы ЭРДУ в течение времени работы двигательной установки Т ДУ при выполнении транспортной операции.
Наличие теневого участка траектории полёта буксира с СЭРДУ существенно усложняет расчётную модель буксира. Наибольшая продолжительность полёта в тени будет на участке, когда направление Земля – Солнце лежит в плоскости траектории или близкой к ней. В этом случае предельные оценки энергопотребления при полёте буксира на теневом участке можно определить из следующих соображений:
-
• угол теневой части орбиты (траектории) буксира
R З
ϕ т = 2 arcsin R , (3)
п где RЗ — радиус Земли; Rп — радиус перигея;
-
• время полёта буксира в тени Земли
Т = т
ϕ т R п
, V
п
где V п — скорость буксира в перигее;
-
• энергозатраты на работу ЭРДУ в тени Земли на начальных витках
полёта и электропитание бортовых систем буксира, определяющие ёмкость АБ, равны
Е АБ0 = ( Р ЭРДУ + Р ТС ) Т т =
М СБ = ρ СБ S СБ = Р СБ
η СБ Е С
= n ЭРД P ЭРД Т т + P ТС Т т ; (5)
-
• часть мощности, генерируемой СБ, отводимая на зарядку АБ:
Е
АБ0 , (6)
АБ Т – Т орб т где Торб — период орбиты МБ;
-
• проектная мощность СБ с учётом выражения (5)
Р СБ = Р ЭРДУ + Р АБ + Р ТС =
=(1 + τ т )( Р ЭРДУ + Р ТС ) =
= (1 + τ т ) n ЭРД P ЭРД + (1 + τ т ) Р ТС , (7)
где τ т = Т т /( Т орб – Т т ).
При выполнении расчёта по формулам (3)–(7) возникает существенная неопределённость в оценках требуемой мощности СБ, обусловленная незнанием действительного положения теневых участков траектории полёта КА. Длительность этих участков в большой степени зависит от выбранной траектории, времени выполнения транспортной операции, параметров энергетической установки и двигательной системы.
Массовая модель МБ. Расчёт массы МБ выполняется от значения конечной массы МБ М КА р , доставляемой на РО, которую можно определить следующим выражением
М КА р = М ПН + М СБ + М АБ +
+ М СЭС + М ЭРДУ + М СХП + М к , (8) где М ПН — масса полезной нагрузки; М СБ — масса СБ; М АБ — масса АБ; М СЭС — масса системы электроснабжения (СЭС), включающая систему преобразования тока [13]; М ЭРДУ — масса ЭРДУ; М СХП — масса системы хранения и подачи РТ (без РТ); М к — масса конструкции МБ.
Масса СБ связана с её площадью S СБ и КПД η СБ :
S СБ
р
СБ
η СБ Е С
1 + τ 1 + τ т т, nЭРД ЭРД ТС
η СБ Е С η СБ С
1 + τ т
= ρ СБ n
η СБ Е С
1 + τ т , ЭРД ЭРД ρ СБ ТС
η СБ Е С
где ρ СБ — удельная масса СБ, кг/м2.
Значение удельной массы СБ включает в себя соответствующую характеристику собственно фотоэлектронного преобразователя (ФЭП), защитного стекла, обычно изготовляемого из плавленого кварца, клеевого слоя и подложки [14–16]. В качестве подложки для СБ большой мощности целесообразно применять сотовые панели, придающие повышенную жёсткость батарее и обладающие приемлемой удельной массой. Перелёт межорбитального КА с низкой ОО на РО высотой несколько тысяч километров и более связан с длительным нахождением в радиационных поясах, вызывающих деградацию ФЭП. Для компенсации негативного влияния радиационных поясов рекомендуется увеличивать толщину защитного стекла, наклеиваемого на освещаемую поверхность ФЭП, а для защиты тыльной стороны ФЭП — увеличивать толщину сотовой панели. Анализ результатов, представленных в работах [14–16], и выполненные оценки дают основание определить величину ρ СБ в диапазоне 3,5…4,5 кг/м2.
Масса АБ зависит от её ёмкости
АБ0 т
М = = ( Р + Р ) =
АБ ЭРДУ ТС
АБ w АБ
1 + τ 1 + τ
= Т т n P + Т т P , (11)
т ЭРД ЭРД т ТС wАБ wАБ где wАБ — удельная энергоёмкость АБ, Дж/кг (принято для литий-ионных аккумуляторов с kАБ = 5,544·105 Дж/кг [15]);
Массу СЭС целесообразно соотнести с проектной мощностью СБ по формуле
M СЭС = μ СЭС Р СБ = μ СЭС (1 + τ т ) ×
× n ЭРД P ЭРД + μ СЭС (1 + τ т ) Р ТС , (12)
где μ СЭС — коэффициент массы СЭС.
Массу ЭРДУ можно определить соотношением, связывающим количество ЭРД с их массой, функционально связанной с мощностью одного двигателя:
где Е С = 1 380 Вт/м2 — Солнечная постоянная;
χ
ЭРДУ nЭРД μЭРД Э РД, где μЭРД — коэффициент массы ЭРД; χ — показатель влияния мощности ЭРД на массу двигателя. Так, например, по данным источника [17] можно принять следующие оценки коэффициентов в этой формуле: μЭРД = 1,9 кг/(кВт)χ; χ = 0,75.
Для дальнейшего применения эту формулу целесообразно преобразовать, заменив количество двигателей отношением полного расхода РТ к расходу через один ЭРД m . ЭРД :
M
РТ χ
ЭРДУ µ ЭРД . ЭРД
ДУ m ЭРД
|
M РТ 1 |
1 + χ ЭРД |
(13) |
|
= µ ЭРД T ДУ (2 η ЭРД ) χ |
1 – χ ЭРД |
Определим массу энергодвигательной системы (ЭДС) МБ:
M ЭДС = M СБ + M АБ + M СЭС + M ЭРДУ =
= ( μ ЭДС Р
ЭРД
χ
μ ЭРД ЭРД n ЭРД μ ЭДС ТС,
где
1 + τ т 1 + τ т
µ = ρ + T + µ (1 + τ ) =
ЭДС СБ η Е т w СЭС т
СБ С АБ
ρ СБ η СБ Е С
+
T
т
w АБ
+ µ СЭС
(1 + τ т ),
слагаемые
которой непосредственно зависят от мощности ЭРД.
В данной работе принята газобаллонная система хранения и подачи рабочего тела (СХП) на основе унифицированных сферических баллонов высокого давления (БВД) комбинированной конструкции с композитной оболочкой
и металлическим лейнером производства ЗАКБ «САФИТ», лицензированных для авиационной и космической отрасли [18]. На основе этих данных в расчёты заложен сферический БВД объёмом V БВД = 25 дм3, массой M БВД = 6,2 кг с давлением РТ p РТ ≤ 340 атм.
Масса РТ, содержащаяся в одном баллоне, по уравнению состояния идеального газа выражается формулой:
µ p
MРТ 1 = РТ Р Т V БВД, (15) РТ где μРТ — молекулярная масса РТ; pРТ, TРТ — давление и температура РТ соответственно; R — универсальная газовая постоянная.
В частности, масса ксенона в одном БВД при p РТ = 340 атм и T РТ = 300 К равна M РТ 1 = 44,6 кг. Фактически расчёт запаса РТ на транспортную операцию сводится к определению количества БВД в СХП n БВД . Масса всей СХП с учётом запаса РТ, пускорегулирующей арматуры и элементов пневмоавтоматики составит
M СХП = (1 + k СХП ) n БВД (1 + k БВД ) M РТ 1 =
= (1 + k СХП ) (1 + k БВД ) M РТ = μ СХП M РТ , (16) где k СХП — коэффициент увеличения массы СХП за счёт пускорегулирующей арматуры и элементов пневмоавтоматики; k БВД = M БВД / M РТ 1 ≈ 0,138; μ СХП = (1 + k СХП ) (1 + k БВД ).
Начальная масса МБ с учётом выражений (14), (16) и массы полезной нагрузки составит
М КА0 =(1 + k КА ) ( М ПН + М ЭДС + М СХП ) =(1 + k КА ) [ М ПН + μ ЭДС Р ТС + ( μ ЭДС Р ЭРД + μ ЭРД Р χ ЭРД ) n ЭРД + μ СХП M РТ ], (17)
где k КА — коэффициент массы конструкционных элементов КА (корпуса, ферм крепления полезной нагрузки (ПН), бортового оборудования и т. п.),
М
КА0 χ
– М ПН – µ ЭДС Р ТС = ( µ ЭДС Р ЭРД + µ ЭРД Р ЭРД )
1 + k КА
определяющих массу конструкции МБ М к , входящую в формулу (8).
Перепишем выражение (17) в следующем виде:
М РТ
.
m ЭРД ДУ
+ µ СХП М РТ
χ µ ЭДС ЭРД µ ЭРД ЭРД
.
m ЭРД ДУ
Если пренебречь массой ЭРД, то это уравнение можно записать так:
М
КА0
ПН µ ЭДС ТС
1 + k КА
µ ЭДС 2
ЭРД µ СХП
2 η ЭРД Т ДУ
М РТ.
М РТ.
С учётом массы ЭРД в общем виде имеем:
М КА0
1 + k КА
– М ПН – µ ЭДС Р ТС
µ ЭДС I ЭРД 2 η ЭРД
+ µ ЭРД .1– χ m ЭРД
ЭРД
2 η ЭРД
М РТ
×
2 η ЭРД Т ДУ
µ ЭДС I ЭРД
µ ЭДС I ЭРД + µ ЭРД
.
η ЭРД ДУ m ЭРД ДУ
χ
+ µ
М РТ
СХП
Т ДУ
I 2
= µ ЭДС I ЭРД
+ µ ЭРД (2 η ЭРД ) – χ
1– χ ЭРД
. 2χ mЭРД ЭРД
2 η ЭРД
+ µ СХП
+ µ ЭРД (2 η ЭРД ) 1– χ
.1– χ m ЭРД
2 χ 1– χ
ЭРД ЭРД µ СХП η ЭРД ДУ
В основу расчёта запаса массы РТ на транспортную операцию МБ положено допущение о соответствии энергетического эквивалента перелёта, определяемого значением массы РТ, значению характеристической скорости операции V х (формула Циолковского). Характеристическая скорость межорбитального перелёта V х (без учёта энергозатрат на преодоление сопротивления атмосферы) определяется разностью орбитальных скоростей МБ на опорной V о и на конечной (рабочей) V р орбитах:
∆ V х = | V о – V р |.
Следует отметить, что эта формула применима для круговых орбит. Вследствие влияния сопротивления атмосферы, несферичности Земли и возможного отключения электроракетной двигательной установки на теневых участках, форма спиральных витков траектории может значительно отклониться от круговой. Поэтому величина V х применима только для оценки энергозатрат на перелёт.
На основе формулы Циолковского с использованием величин ∆ V х и I ЭРД
М РТ
2 χ
ЭРД µ СХП η ЭРД ДУ
М РТ
2 η ЭРД Т ДУ
.
×
можно оценить массу РТ на перелёт в направлении с ОО на РО:
M РТ = М КА0 [1–exp(– ∆ V х / I ЭРД )] ≈
≈ М КА0 ∆ V х / I ЭРД , (20)
где учтены два первых слагаемых в разложении экспоненты, так как при полётах в ближнем космосе I ЭРД >> ∆ V х .
Подставляя в выражение (18) значение М РТ из формулы (20), получим
М КА0 1 + k КА
= ∆ V х
М ПН – µ ЭДС Р ТС
µ ЭДС
2 η ЭРД Т ДУ
I ЭРД
+ µ СХП I ЭРД
м
КА0.
Дифференцируя по I ЭРД , получим следующее выражение для оптимального
удельного импульса:
опт
ЭРД
µ СХП
ЭРД T ДУ .
µ ЭДС
Подставляя в уравнение (19) зна-
чение М РТ из формулы (20), получим
|
М КА0 |
µ ЭДС Р ТС = ∆ V x |
µ ЭРД(2 η ЭРД) – χ I Э χ РД µ ЭДС I ЭРД + 1 – χ F ЭРД |
+ 2 µ СХП η ЭРД Т ДУ |
КА0 |
|
|
1 + k КА |
ПН |
I ЭРД |
2 η ЭРД Т ДУ |
Дифференцируя по I ЭРД , получим
µ ЭРД(2 η ЭРД) – χ I Э χ Р – Д 2 µ СХП η ЭРД Т ДУ
Ц ЭДС + Х------------------------
ЭРД ЭРД
= 0;
µ ЭДС +
χµ ЭРД
2 η ЭРД
1– χ
F ЭРД I ЭРД
I ЭРД – 2 µ СХП η ЭРД Т ДУ
= 0.
При χ = 1 формула для оптимального удельного импульса приобретает следующий вид:
опт µ СХП
I ЭРД 2 η ЭРД µ ЭДС + µ ЭРД T ДУ .
При χ ≠ 1 формулу для I Э оп Р т Д можно записать в следующем виде:
опт I ЭРД
µ СХП T ДУ
η ЭРД 2 η ЭРД 1– χ
µ ЭДС µ ЭРД χ
F ЭРД I ЭРД
Выражение (23) не содержит характеристической скорости операции ∆ V х вследствие принятого в уравнении (20) допущения. Кроме того, при условии пропорциональности массы ЭРД его мощности χ = 1, параметры, содержащие χ в показателях степени, становятся равными 1, и формула заметно упрощается. В тех случаях, когда χ ≠ 1 I Э оп Р т Д можно рассчитать методом последовательных приближений, положив на первом шаге χ = 1.
В расчётах принимались значения параметров при перелёте с ОО высотой 300 км на РО высотой 20 000 км, изложенные в табл. 1.
Таблица 1
Параметры перелёта с опорной орбиты на рабочую
|
№ п.п. |
Параметр |
Значение |
|
|
Символ |
Наименование, размерность |
||
|
1 |
ТС |
Мощность технических систем МБ, Вт |
3 000 |
|
2 |
ЭРД |
Сила тяги модуля ЭРД, Н |
1 |
|
3 |
n ЭРД |
Количество ЭРД в составе ЭРДУ, шт. |
4 |
|
4 |
η ЭРД |
КПД ЭРД |
0,5 |
|
5 |
χ |
Показатель степени в формуле (12) |
0,75 |
|
6 |
μ ЭРД |
Удельная масса ЭРД в формуле (12), кг/Вт |
1,9·10–3 χ |
|
7 |
ρСБ |
Удельная масса СБ, кг/м2 |
1,6 |
|
8 |
ηСБ |
КПД СБ |
0,228 |
|
9 |
w АБ |
Удельная энергоёмкость АБ, Дж/кг |
5,544·105 |
|
10 |
БВД |
Относительная масса баллонов высокого давления, кг БВД/кг РТ |
0,138 |
|
11 |
СХП |
Коэффициент массы СХП, кг СХП/кг РТ |
0,2 |
|
12 |
μ СЭС |
Коэффициент массы СЭС, кг/кВт |
0,15 |
|
13 |
ъ k КА |
Коэффициент массы конструкции МБ |
0,125 |
При принятых исходных данных получим следующие значения основных проектных параметров:
I опт = 56 179 м/с; Р = 262,2 кВт;
ЭРД СБ
М CЭС = М СБ + М АБ = 2 693,7 кг;
М РТ = 502,4 кг; n БВД = 12; М СЭС = 115 кг;
М АБ = 1 371 кг; S СБ = 826 м2;
М СБ = 1 321 кг; М КА0 = 7 100 кг.
При конструкционной проработке МБ с СЭРДУ следует более детально рассматривать компоненты конструкции, их энергопотребление и массу с целью уточнения энергомассовой модели буксира.
Тепловой режим работы солнечной батареи
Дифференциальное уравнение энергобаланса СБ, позволяющее рассчитать её температуру T СБ , имеет следующий вид [19]:
dT СБ
С ρ S = Q cos θ + Q + СБ СБ dt Sun Phon
+ QRSun
Rad – P ЭРДУ – K АБ P АБ,
где C — удельная теплоёмкость СБ; t — текущее время; QSun — мощность теплового солнечного излучения; θ — угол между нормалью к СБ и направлением на Солнце в системе координат СБ; QPhon — мощность теплового излучения от подстилающей поверхности Земли; QRSun — мощность теплового cолнечного излучения, отражённого от подстилающей поверхности Земли; QRad = ( ε с + ε об ) σ Т 4 СБ S СБ — мощность радиационного излучения СБ на обе стороны, здесь ε с и ε об — коэффициенты теплового излучения поверхности солнечной и обратной сторон СБ соответственно; σ — постоянная Стефана–Больцмана; P ЭРДУ — мощность электропитания ЭРДУ; K АБ = 1 — идёт зарядка АБ; K АБ = 0 — АБ заряжена до энергии расчётной величины.
При нахождении КА в тени Земли уравнение энергобаланса СБ упрощается:
С ρ S dT СБ = Q – Q . (25) СБ СБ Phon Rad
В процессе решения задачи полёта МБ с СЭРДУ уравнения (24), (25) приводятся к конечно-разностной форме и решаются численно в итерационном процессе, позволяя определить температуру СБ.
На рисунке представлена модель МБ с СЭРДУ. При её разработке ставилась задача отображения специфических компонентов, присущих именно КА с СЭУ и нашедших отражение в расчётной модели [12, 20]. Масштабирование элементов конструкции в формате изображения не проводилось.
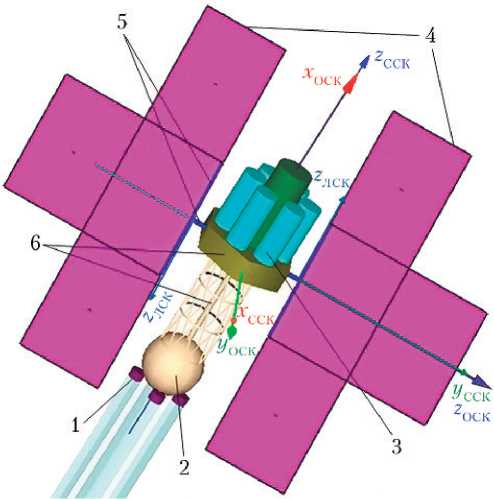
Расчётная модель межорбитального буксира (МБ) с солнечной электроракетной двигательной установкой: 1 — модуль электроракетного двигателя; 2 — система хранения и подачи рабочего тела; 3 — модуль полезной нагрузки; 4 — панели солнечных батарей (СБ); 5 — штанги поворота панелей СБ; 6 — элементы силовой конструкции МБ (ОСК — орбитальная система координат; ССК — строительная система координат МБ; ЛСК — локальная система координат СБ) (рисунок создан авторами)
Конструкция разработана в среде OpenGL и является элементом визуализации рабочей программы графического отображения полёта КА, входящего в состав программного комплекса моделирования межорбитальных перелётов КА с ЭРДУ.
уравнения движения МБ с малой тягой
Полёт МБ с ЭРДУ происходит в течение достаточно продолжительного времени и не сопровождается интенсивными манёврами вокруг центра масс (ЦМ) аппарата. Поэтому динамика полёта МБ может быть описана векторными дифференциальными уравнениями движения материальной точки в поле тяготения Земли, имеющими следующий вид в векторной форме:
→→ d\L
КА _ ЭРДУ ^ ^
dM^ A t) - а а - g З ;
dt VКА где V→КА — вектор скорости МБ; R→ — радиус-вектор текущего положения МБ; F→ЭРДУ — вектор силы тяги ЭРДУ; →аа — вектор ускорения (точнее, замедления)
от силы аэродинамического сопротивления верхней атмосферы; М КА ( t ) — текущая масса МБ; → g З — вектор ускорения МБ в поле тяготения Земли.
Полагается, что тяга маршевой ЭРДУ, работающей на изменение высоты полёта МБ, приложена по направлению его вектора скорости V → КА . Для увеличения высоты полёта вектор силы тяги должен быть приложен по вектору скорости, а для снижения КА — в противоположном направлении.
При полёте МБ его масса уменьшается вследствие расхода РТ на работу ЭРДУ в течение времени
M КА ( t ) = M КА (0) – m ЭРДУ t , (27)
где m . ЭРДУ — массовый расход РТ.
Гравитационное поле Земли рассчитывается по модели нормального поля тяготения, учитывающего вторую и четвёртую зональные гармоники [21] с потенциалом вида
µ З µ 20 µ 4 0
U н = r + r 3 P 2 0 (sin ϕ ) + r 5 P 40 (sin ϕ ) , (28)
где μ З = 3,986·1014 м3/с2;
μ 20 = –1,7555·1025км5/с2;
μ 40 = 1,563955·1036 км7/с2 — константы в разложении гравитационного поля Земли по полиномам Лежандра, определяющим широтную зависимость поля тяготения Земли; P 20 (sin ϕ ) = 0,5(3sin2 ϕ – 1); P 40 (sin ϕ ) = 0,125(35sin4 ϕ – 30sin2 ϕ + 3).
Вектор → а а в уравнениях (26) определяет ускорение от силы аэродинамического сопротивления атмосферы Земли:
→ а а = С х ρ
V → 2 атм
2 M КА ( t )
S , мид
где С х — коэффициент аэродинамического сопротивления МБ; ρ — плотность атмосферы в месте нахождения МБ; S мид — площадь миделевого сечения МБ в набегающем потоке; V → атм — скорость МБ с учётом вращения атмосферы вместе с Землей
→→ →
V атм = V АГСК + →Ω З × R , (30)
здесь V → АГСК — вектор скорости МБ в абсолютной геоцентрической системе координат (АГСК); →Ω З — вектор угловой скорости вращения Земли; R → — вектор текущего положения МБ.
В ГОСТ Р 25645.166–2004 [22] приведена методика расчёта коэффициента аэродинамического сопротивления КА С х при полёте в верхней атмосфере в диапазоне 120…1 500 км. Соотношения модели позволяют вычислить нормальную и касательную компоненты силы аэродинамического сопротивления корпуса КА. При расчёте полёта МБ с СЭРДУ принята плоская панельная конструкция батарей. Поэтому площадь миделевого сечения СБ определена на основании следующего выражения:
S мид СБ = cos ψ S СБ , где ψ — угол между вектором скорости и нормалью к поверхности СБ.
Вклад в силу аэродинамического сопротивления корпуса МБ учитывается только для торцевой площади шестиугольной платформы (рис. 1), расположенной по нормали к вектору его скорости.
Здесь также следует иметь в виду, что для корректного расчёта сил аэродинамического сопротивления необходимо знание температуры поверхности наружных элементов конструкции МБ, главным образом, СБ Т СБ [см. уравнения (24), (25)].
Несмотря на малое значение силы сопротивления верхней атмосферы, она может существенно повлиять на изменение параметров орбиты (высоты, эксцентриситета, аргумента перигея) за продолжительный интервал времени полёта, особенно на высотах ниже 800 км. Поэтому для модели КА с СБ эти факторы последовательно учитываются в баллистических расчётах.
Расчёт параметров верхней атмосферы в процессе полёта МБ с СЭРДУ выполнялся с использованием формул, приведённых в Модели стандартной атмосферы [23], применимых в диапазоне высот 120…1 200 км.
Для решения поставленной задачи межорбитального перелёта необходимо выбрать систему координат. Длительность перелётов МБ с СЭРДУ может составлять от нескольких суток до нескольких месяцев. За это время Земля не только совершит множество оборотов вокруг своей оси, но и существенно продвинется в своём движении вокруг Солнца. Поэтому представляется наиболее целесообразным использовать АГСК, в которой ось x АГСК направлена из центра Земли в точку весеннего равноденствия ϒ , ось z АГСК совпадает с осью вращения Земли, а ось y АГСК дополняет систему координат до правой.
В пользу выбора АГСК говорит и то обстоятельство, что начальную и конечную орбиты МБ, как и систему координат АГСК, можно считать неподвижными относительно звёзд, что существенно упрощает расчётный алгоритм. Тем не менее, следует иметь в виду, что наблюдение за полётом МБ ведётся из наземного центра управления. Поэтому необходимо знать положение МБ и в относительной геоцентрической системе координат (ОГСК), связанной с вращающейся Землей, причём оси z обеих систем координат совпадают, а ось x ОГСК направлена на Гринвичский меридиан.
Пересчёт компонент радиус-вектора положения МБ из АГСК в ОГСК выполняется по векторной формуле →→
R АГСК = Mtz ( γ ) R ОГСК , (31)
где Mtz ( γ ) — матрица вращения вокруг оси z — имеет следующий вид:
Вычисление звёздного времени S выполняется по специальной математической процедуре, тесно связанной с расчётом эфемериды Солнца и текущего положения радиус-вектора Земля – Солнце относительно направления в точке весеннего равноденствия [24]. Знание положения Солнца особенно необходимо при расчёте полёта МБ с СЭРДУ.
Система уравнений (24)–(32) должна быть дополнена граничными условиями (параметрами начальной и конечной орбит) и начальными условиями (координатами точки старта КА на начальной орбите R → КА0 и компонентами скорости в этой точке V → КА0 в момент времени старта t = 0).
основные соотношения процессов управления ориентацией СБ
При выполнении целевой программы полёта МБ, оснащённого СБ, актуальной становится задача определения оптимальной ориентации СБ, обеспечивающей максимальную плотность потока излучения Солнца на её поверхность.
Решение задачи управления ориентацией СБ предполагает известными в расчётный момент времени:
-
• положение центра масс (ЦМ) МБ на орбите и, соответственно, его текущей орбитальной системы координат (ОСК);
-
• ориентацию МБ в ОСК, т. е. положение его строительной системы координат (ССК) в ОСК;
-
• направление на Солнце из ЦМ МБ в абсолютной или относительной геоцентрической системе координат, определённое единичным вектором S → АГСК или S ОГСК ;
-
• ориентацию СБ в ССК МБ, характеризуемую положением ССК СБ в ССК МБ.
Вариант оптимальной ориентации СБ на Солнце, имеющей две управляемых степени свободы [первую — относительно оси у ССК (поворот всей СБ на 360 ° ), а вторую — вокруг оси локальной строительной системы координат (ЛСК) z ЛСК (синхронные повороты правой и левой панелей СБ в диапазоне ±90 ° )], рассмотрим на конкретном примере МБ, образ которого показан на рис. 1.
Считаются известными: положение ССК МБ, определённой в его ОСК единичным в → ектором (1-вектор) с компонентами A = ( А , А , А );
ССК xССК, yССК, zССК направление 1-вектора ориентации СБ в ССК МБ B→ = (B , B , B );
ССК xССК, yССК, zССК направление 1-вектора ориентации Солн-→ ца в ССК МБ SССК = (SxССК, SyССК, SzССК). Здесь полагаем, что узел крепления СБ совпадает с ЦМ МБ.
Поскольку ось поворота СБ жёстко связана с корпусом МБ через подшипниковые узлы, то поворот возможен только вокруг оси у сск на угол ± Р к оси x CСК . После поворота батареи формула ориентации 1-вектора СБ может быть конкретизирована в виде
В ССК = (cos p , 0, sin p ). (33)
Угол а между 1-вектором направления на Солнце и 1-вектором ориентации СБ можно определить через скалярное произведение этих векторов:
cos a = S x ССК cos p + S z ССК sin p . (34)
Очевидно, что максимальная освещённость СБ Солнцем будет достигнута при минимальном ^ значении угла а между 1-вектором S ССК и осью x ССК , соответствующем максимальному значению cos a . Для нахождения угла Р *, определяющего конечное положение панелей СБ и, соответственно, экстремальную освещённость её поверхности, следует продифференцировать эту формулу по Р и приравнять результат нулю. Выполнив эту процедуру, найдём
-
- S x ССК sin p * + S z ССК cos P * = 0;
S
-
р * = arctg . S x ССК
Таким образом, угол Р * определяет проекцию направления Солнца на плоскость ( xz ) ССК МБ. Подставляя значение угла Р * в уравнение (34), найдем угол а *, на который следует довернуть СБ вокруг оси y ССК МБ. Здесь, однако, возникает определённая сложность, связанная с тем, что формула (35) определяет величину угла Р * в диапазоне ±90 ° с точностью до 180 ° . То есть этому значению может отвечать как максимальная, так и минимальная освещённость панелей. Для получения максимального результата следует обратиться к анализу второй производной от выражения (34).
Как известно, максимуму функции соответствует отрицательное значение её второй производной. Поэтому условие максимума имеет вид
D ( a)
d \V
= — S x сск cos P * —
— S z ССК sin e * < 0.
Если ^ угол в * и оба компонента вектора S ССК положительны, то условие максимума (36) выполняется автоматически. При отрицательных значениях следует выполнить дополнительное исследование выражения (35) с анализом знаков и значений компонент вектора направления на Солнце. Так, если угол в * отрицательный, то его следует переопределить по формуле в * ' = 180 ° + в *-
Если панели СБ обладают второй степенью свободы, т. е. могут вращаться вокруг штанг крепления, ориентированных вдоль осей z ЛСК , то панели можно довернуть на угол у для улучшения энергетических показателей СБ. Принцип расчёта в этом случае аналогичен рассмотренному выше, однако следует перейти в ЛСК СБ, повёрнутой вокруг оси y ССК , и учесть ограничение на углы поворота панелей батарей вокруг штанг крепления.
Из приведённых выражений видно, что направление и величина угла поворота СБ зависят от текущих значений компонент 1-вектора ориентации Солнца в ССК МБ. Таким образом, отслеживая положение Солнца в процессе полёта МБ по орбите и поворачивая СБ на углы а * и у , получим наилучшую реализацию подсветки СБ излучением Солнца.
Межорбитальный перелёт МБ с СЭрду
В качестве примера практического применения описанных выше моделей рассмотрим межорбитальный перелёт МБ с СЭРДУ, выполняющего задачу доставки полезного груза массой 2 000 кг с ОО высотой 300 км на орбиту высотой ≈20 000 км. Полагалось, что ЭРДУ включает четыре модуля с ЭРД с удельным импульсом 40 000 м/с, тягой модуля по 1 Н и КПД = 0,5; рабочее тело ЭРД — ксенон.
Расчётная мощность электропитания ЭРДУ Р ЭРДУ = 160,0 кВт.
Были приняты следующие характеристики элементов конструкции МБ: удельная мощность СЭУ 315 Вт/м2, что соответствует КПД СБ 23%; удельная масса СЭУ 1,6 кг/м2; удельная масса аккумуляторной литий-ионной батареи 5,544·105 Дж/кг [15]; теплоёмкость СБ 600 Дж/(кг·К). В результате расчёта получены следующие энергомассовые параметры СЭУ: мощность 185 кВт (с учётом 15% на электропитание бортовых потребителей и резерв); площадь 587 м2; масса 940 кг.
Траектория полёта МБ с ЭРДУ имеет вид раскручивающейся спирали, содержащей сотни витков. Поэтому при решении задач предполагалось сохранение результатов с заданным шагом по высоте (~500 км), соотнесённых с моментами времени пересечения плоскости экватора и перехода траектории из Южной полусферы мира в Северную. Расчёты выполнялись в специализированном программном комплексе, позволяющем варьировать в широком диапазоне как траекторные параметры полёта МБ, так и их конструктивные характеристики.
Рассматривались четыре варианта решения задачи перелёта:
Вариант 1. В составе бортового оборудования МБ имеется АБ ёмкостью, достаточной для обеспечения непрерывной работы ЭРДУ в течение всей продолжительности начального витка траектории. В этом варианте ЭРДУ работает на всей траектории перелёта.
Вариант 2. В составе бортового оборудования МБ имеется АБ ёмкостью, достаточной для обеспечения непрерывной работы ЭРДУ в течение всей продолжительности конечного витка траектории. ЭРДУ отключается на теневых участках при израсходовании энергетического запаса в АБ.
Вариант 3. В составе бортового оборудования МБ отсутствует АБ для энергообеспечения ЭРДУ.
Вариант 4. В составе бортового оборудования МБ отсутствует АБ для энергообеспечения ЭРДУ. Время старта выбирается с учётом минимальной продолжительности полёта в тени Земли.
В вариантах 1–3 КА стартует из точки перигея ОО 20.04.2020 г. в 15:00:00.
В варианте 4 КА стартует из точки перигея ОО 20.04.2020 г. в 7:00:00. После достижения заданной высоты на РО от МБ отделяется полезная нагрузка, он разворачивается на 180 ° и возвращается на исходную высоту ОО.
Расчётные баллистические характеристики вариантов перелёта показаны в табл. 1. Здесь следует отметить, что сразу рассчитать массу РТ на всю операцию для любого варианта не представляется возможным. Поэтому была реализована итерационная процедура последовательного уменьшения начальной массы РТ и, соответственно, массы системы его хранения и подачи в ЭРД. Именно эти данные и представлены в табл. 2.
Анализ траектории полёта МБ с СЭРДУ показывает существенное влияние АБ на результаты операции. Её масса и соответствующее утяжеление конструкции приводит к увеличению длительности перелёта на 20 сут и более, значительному увеличению массы СБ и РТ и в целом стартовой массы КА ( варианты 1 , 2 ).
Другим специфическим фактором является увеличение эксцентриситета витков траектории, особенно проявляющееся на траектории, содержащей длительные участки полёта на теневой стороне с неработающими ЭРД ( варианты 2 , 3 ). В этих вариантах реализуется наибольший эксцентриситет. В свою очередь, в варианте 1 ЭРДУ работает непрерывно на всей траектории, включая теневые участки, а в варианте 4 выбрано время запуска, обеспечивающее лишь кратковременные теневые участки, а более 90% времени полёт выполняется на освещённой Солнцем траектории, т. е. при непрерывной работе ЭРДУ. Именно непрерывный или близкий к нему режим работы ЭРДУ обеспечивает наименьший эксцентриситет витков траектории полёта МБ. Тем не менее, как показывает детальный анализ результатов расчёта, наличие СБ большой площади оказывает существенное влияние на формирование траектории полёта КА на высотах до 400 км при его движении в зонах выхода из тени и захода в тень, где влияние парусности батарей наиболее заметно.
Таблица 2
расчёт вариантов транспортной операции для МБ с СЭрду
|
Параметры |
Варианты |
|||
|
1 |
2 |
3 |
4 |
|
|
Время полёта на теневом участке первого витка, с |
2 192 |
3 312 |
2 192 |
2 505 |
|
Энергозатраты ЭРДУ на работу на теневом участке, запасаемые в АБ, МДж |
403, 3 |
609,4 |
0 |
0 |
|
Масса АБ, кг |
727,4 |
1 099 |
0 |
0 |
|
Мощность СБ, отводимая на зарядку АБ, кВт |
125 |
15,5 |
0 |
0 |
|
Расчётная мощность СБ, кВт |
309 |
200 |
184 |
184 |
|
Площадь СБ, м2 |
981 |
633,4 |
585 |
585 |
|
Масса СБ, кг |
1 569 |
1 013 |
935 |
935 |
|
Начальная масса рабочего тела при старте с ОО, кг |
873 |
756 |
463 |
504 |
|
Продолжительность прямого перелёта, сут |
65,1 |
66,8 |
47,9 |
44,9 |
|
Апогей РО, км |
20 149 |
20 159 |
20 322 |
20 279 |
|
Перигей РО, км |
19 328 |
14 813 |
12 560 |
18 340 |
|
Количество витков при прямом перелёте |
493 |
551 |
401 |
368 |
|
Продолжительность обратного перелёта, сут |
37,2 |
34,8 |
19,125 |
17,9 |
|
Апогей ОО при возвращении, км |
421,8 |
968 |
863 |
1 241 |
|
Перигей ОО при возвращении, км |
293 |
296 |
300 |
287 |
|
Количество витков при возвращении на ОО |
272 |
265 |
152 |
134 |
|
Масса рабочего тела при возвращении на ОО, кг |
3,5 |
0,2 |
1,2 |
1,34 |
|
Начальная масса МБ, кг |
6 061 |
5 690 |
3 952 |
4 010 |
|
Очевидно, что вариант 4 является наиболее приемлемым по энергомассовым показателям и продолжительности перелёта. Результаты расчёта перелёта МБ с ОО на РО по варианту 4 показаны в табл. 3. Строки № 1–7 показывают динамику формирования витков с возрастанием эллиптической составляющей. Баллистические характеристики межорбитального пе в направлении опорная орбита ^ рабочая орбита (ва] |
Этот процесс продолжается до 195-го витка, где эксцентриситет достигает значения ~0,0702. На этом участке траектории ещё есть теневые участки, где ЭРДУ не работает, но их длительность уменьшается, а начиная с 220-го витка полёт межорбитального буксира происходит по траектории, полностью освещённой Солнцем. Таблица 3 релёта МБ с СЭрду иант 4) |
|||||||||||
|
№ п/п |
Дата и время |
№ витка |
М РТ , кг |
H КА , км |
V КА ,км/с |
H а , км |
H п , км |
Ш „ , ° |
П ° |
э , ° |
Т орб , мин |
Р з . ° |
|
1 |
20.04.2020 07:00:15 |
1 |
503,3 |
299,3 |
7,730 |
299,9 |
299,1 |
–44 |
59,9 |
45 |
90,36 |
0 |
|
2 |
20.04.2020 08:30:30 |
2 |
502,9 |
303 |
7,729 |
307,7 |
302,3 |
–138,6 |
–142,1 |
317,8 |
90,48 |
0 |
|
3 |
20.04.2020 10:00:45 |
3 |
502,6 |
306,8 |
7,728 |
315,8 |
305,1 |
–133,9 |
–165,6 |
313,6 |
90,59 |
0,1 |
|
4 |
20.04.2020 13:02:00 |
5 |
501,9 |
314,6 |
7,726 |
332,5 |
310,8 |
–131,6 |
148,9 |
310,9 |
90,82 |
0,2 |
|
5 |
20.04.2020 16:03:30 |
7 |
501,2 |
322,7 |
7,723 |
349,3 |
316,9 |
–129,9 |
102,4 |
309,6 |
91,05 |
0,4 |
|
6 |
20.04.2020 19:05:30 |
9 |
500,5 |
331,2 |
7,720 |
366,4 |
323,1 |
–128,6 |
50, 6 |
308,6 |
91,29 |
0,5 |
|
7 |
21.04.2020 16:34:00 |
23 |
495,5 |
395,8 |
7,695 |
491,6 |
371,0 |
–126,2 |
89,9 |
305,6 |
93,6 |
1,4 |
|
8 |
23.04.2020 00:00:15 |
43 |
488,0 |
505,5 |
7,648 |
684,6 |
451,8 |
–122,7 |
–27,7 |
301,8 |
95,88 |
2,7 |
|
9 |
26.04.2020 23:34:00 |
100 |
462,8 |
954,8 |
7,427 |
1 334,0 |
781,6 |
–109,9 |
–39,1 |
289,9 |
106,2 |
6,6 |
|
10 |
02.05.2020 09:46:15 |
168 |
423,9 |
1 838,2 |
7,007 |
2 383,4 |
1 479 |
–99,3 |
149,6 |
278,9 |
125,4 |
11,9 |
|
11 |
10.05.2020 16:53:45 |
250 |
355,0 |
3 875,1 |
6,253 |
4 497,1 |
3 359 |
–92,2 |
22,3 |
272,2 |
173,3 |
20,1 |
|
12 |
15.05.2020 08:44:30 |
285 |
314,7 |
5 422,8 |
5,825 |
6 075,2 |
4 861 |
–91,4 |
136,6 |
271,4 |
213,6 |
24,7 |
|
13 |
20.05.2020 08:54:45 |
315 |
271,4 |
7 526,9 |
5,363 |
8 221,7 |
6 914 |
–91,1 |
127,0 |
270,9 |
272,9 |
29,6 |
|
14 |
25.05.2020 13:49:15 |
339 |
226,5 |
10 407 |
4,879 |
11 151 |
9 734 |
–90,6 |
46,9 |
270,5 |
361,6 |
34,8 |
|
15 |
30.05.2020 03:50:00 |
357 |
181,0 |
14 379 |
4,386 |
15 178 |
13 644 |
–90,3 |
–52,2 |
270,3 |
496,9 |
40,0 |
|
16 |
01.06.2020 06:44:30 |
361 |
168,5 |
15 729 |
4,250 |
16 544 |
14 979 |
–90,4 |
145,7 |
270,3 |
546,1 |
41,4 |
|
17 |
02.06.2020 21:08:30 |
365 |
154,7 |
17 389 |
4,099 |
18 220 |
16 622 |
–90,4 |
71,9 |
270,3 |
608,6 |
43,0 |
|
18 |
03.06.2020 18:03:00 |
367 |
147,2 |
18 376 |
4,016 |
19 214 |
17 600 |
–90,3 |
–26,5 |
270,3 |
646,9 |
43,8 |
|
19 |
04.06.2020 12:01:45 |
368 |
140,7 |
20 001 |
3,835 |
20 279 |
18 340 |
–85,7 |
–53,0 |
317,0 |
682,6 |
44,6 |
Примечание. М РТ — масса топлива; H КА, V КА — контрольная высота и скорость полёта МБ; H а, H п — высота апогея и перигея витка соответственно; ю п — аргумент перигея; П — долгота восходящего узла; Э — истинная аномалия; Т о рб — период орбиты; Р З — угол поворота Земли вокруг Солнца.
Здесь ЭРДУ работает непрерывно, эксцентриситет витков уменьшается и на последнем витке равен 0,0377.
Аналогичные тенденции проявляются и в вариантах 1–3 . В варианте 1 результирующий эксцентриситет РО наименьший, так как ЭРДУ работает непрерывно на всей траектории. Однако высокая стоимость этого варианта исключает его реализацию. Также следует отметить, что во всех вариантах перигейные участки витков смещаются к освещённой части траектории, а апогейные — к теневой. Причиной такой ситуации является значительная площадь СБ, приводящая к торможению МБ на низких участках траектории и частичной работе ЭРДУ на её теневых участках.
В процессе расчётов также вычислялись участки приложения силы тяги ЭРДУ на освещённой и теневой сторонах траектории, значения температуры СБ на различных этапах полёта и силы аэродинамического сопротивления КА вследствие влияния верхней атмосферы Земли. Фрагменты соответствующих расчётных данных показаны в табл 4.
Таблица состоит из двух частей: левая часть — результаты расчёта полёта МБ на первых двух витках; правая часть — на последнем витке. В расчётах использовалась простая модель радиационного нагрева/охлаждения плоской тонкой панели, имеющей рассчитанную массу и заданную теплоёмкость. Учитывались энергетические потоки от Солнца на освещённой стороне и тепловой поток от Земли на всей траектории. Согласно расчётным данным, температура СБ вполне коррелирует с положением МБ на освещённой и теневой сторонах траектории полёта, колеблясь от 350 до 180 К. Анализ результатов расчётов подтверждает, что наибольшее аэродинамическое торможение МБ испытывает, когда СБ перпендикулярны вектору скорости в областях выхода из тени Земли или входа в неё.
Учёт сопротивления атмосферы выполнялся до высоты 1 200 км, хотя реально её влияние можно было ограничить высотой ~900 км. Как следует из результатов расчёта, сила аэродинамического сопротивления МБ, обусловленная в общем случае переменной ориентацией СБ относительно направления полёта, может заметно меняться в течение полёта на каждом витке. Анализ зависимости этой силы от параметров перелёта представляет отдельный интерес, например, в упрощённых оценках времени перелёта МБ.
Таблица 4
результаты расчёта параметров Ка на начальном (слева) и конечном участках траектории, вариант 4
|
№ витка |
t , с |
H KA , км |
у , ° |
F атм , Н |
T СБ , K |
№ витка |
t , с |
H KA , км |
т . к СБ, |
|
1С |
15 |
299,3 |
125,1 |
0,2017 |
304,7 |
368 С |
3 894 000 |
18 376 |
310,1 |
|
1С |
1 005 |
295,1 |
63,7 |
0,1543 |
337,1 |
368 С |
3 895 005 |
18 477 |
310,3 |
|
1С |
2 010 |
292,6 |
20,2 |
0,1908 |
322,7 |
368 С |
3 896 010 |
18 596 |
310,3 |
|
1Т |
3 000 |
295,1 |
71,8 |
0,0857 |
208,7 |
368 С |
3 897 000 |
18 726 |
310,2 |
|
1Т |
4 005 |
298,2 |
133,8 |
0,2402 |
197,7 |
368 С |
3 898 005 |
18 869 |
310,0 |
|
1С |
5 010 |
302,9 |
149,4 |
0,2035 |
320,6 |
368 С |
3 899 010 |
19 019 |
309,8 |
|
2С |
6 000 |
300,4 |
90,2 |
0,0008 |
336,1 |
368 С |
3 900 000 |
19 171 |
309,6 |
|
2С |
7 005 |
296,5 |
30,3 |
0,2326 |
329,8 |
368 С |
3 901 005 |
19 325 |
309,3 |
|
2Т |
8 010 |
300,9 |
46,6 |
0,2270 |
255,2 |
368 С |
3 902 010 |
19 477 |
309,1 |
|
2Т |
9 000 |
304,7 |
107,8 |
0,0664 |
197,4 |
368 С |
3 903 000 |
19 620 |
308,8 |
|
2С |
10 005 |
307,5 |
160,0 |
0,1342 |
259,8 |
368 С |
3 904 005 |
19 756 |
308,6 |
|
2С |
11 010 |
305,9 |
116,1 |
0,1208 |
330,2 |
368 С |
3 905 010 |
19 881 |
308,4 |
Примечание. С и Т — солнечная и теневая части траектории соответственно; t — текущее время полёта; H KA — высота КА; у — угол между вектором скорости и нормалью к СБ; F ат м — сила аэродинамического сопротивления; T СБ — температура СБ.
обратный перелёт МБ с СЭрду с рабочей орбиты на опорную
В табл. 5 представлены результаты баллистического расчёта обратного перелёта КА с РО на ОО по варианту 4 . Предполагается, что на РО была отделена полезная нагрузка и выполнен разворот МБ на 180 ° так, что ЭРДУ будет тормозить движение.
Как видно из табл. 5, продолжительность обратного перелёта оказывается в два раза короче прямого, а количество витков снижения почти в три раза меньше прямого перелёта, главным образом за счёт отсоединения полезной нагрузки и израсходования значительной массы РТ. При этом наибольшая скорость снижения реализуется на высотах ниже 900 км.
Данные табл. 5 также свидетельствуют о значительном эксцентриситете (~0,067) конечной орбиты МБ. Эксцентриситет спиральных витков начинает увеличиваться при появлении участков тени Земли на траектории полёта снижающегося МБ. Причины этого явления подобны рассмотренным — отключение ЭРДУ в тени и неравномерное аэродинамическое сопротивление верхней атмосферы.
Конечно, эксцентриситеты рабочей и конечной орбит при возвращении могут быть скорректированы организацией работы ЭРДУ по специальной программе. Но на эту работу потребуется дополнительное время и запас РТ.
заключение
Рассмотрены модели МБ с СЭРДУ, учитывающие только наиболее значимые конструкционные факторы при наличии и отсутствии бортовой аккумуляторной батареи для питания ЭРДУ на теневых участках, и модель компланарного полёта на рабочую орбиту с возвращением к Земле. Анализ результатов моделирования позволяет сделать следующие выводы:
-
1. При конструировании космических аппаратов с ЭРДУ и СЭУ необходимо подбирать траекторию полёта, содержащую теневые участки минимальной длительности, выбором времени начала операции.
-
2. Большая площадь поверхности солнечных батарей и наличие теневых участков с неработающей ЭРДУ приводят к заметному эксцентриситету конечных орбит при полётах в обоих направлениях.
Таблица 5
Баллистические характеристики межорбитального перелёта МБ с СЭрду в направлении рабочая орбита ^ опорная орбита (вариант 4)
№ п/п
Дата и время
№ витка
М РТ , кг
H КА , км
V КА ,км/с
H а , км
H п , км
Ш п , °
О °
9 , °
Т орб, мин
Р з - °
1
04.06.2020 16:19:15
1
139,2
19 013
3,950
20 156
17 534
–100,3
118
280,3
664
44,7
2
08.06.2020 04:25:15
11
108,9
11 672
4,682
12 545
10 521
–101,1
–66
281,1
397
48,2
3
12.06.2020 00:28:15
29
75,8
6 695
5,499
7 412
5 756
–101,7
–12
281,3
244
52,0
4
16.06.2020 01:55:45
59
43,6
3 437
6,379
3 948
3 953
–91,6
–40
271,3
161
56,0
5
20.06.2020 01:25:00
101
16,8
1 335
7,311
1 887
1 316
–158,1
–43
338,1
118
59,9
6
21.06.2020 00:13:00
113
10,8
926
7,553
1 604
625
–176,3
–29
356,0
110
60,8
7
22.06.2020 01:07:30
127
4,6
510
7,827
1 359
506
–7,7
133
8,6
103
61,9
8
22.06.2020 14:33:00
134
1,3
299
7,978
1 240
286
–140,1
109
346,2
99
62,4
Примечание. М РТ — масса топлива; H КА, V КА — контрольная высота и скорость полёта МБ соответственно; H а, H п — высота апогея и перигея витка соответственно; го п — аргумент перигея; О — долгота восходящего узла; 9 — истинная аномалия; Т о рб — период орбиты; Р З — угол поворота Земли вокруг Солнца.
-
3. В ряде случаев целесообразно отказаться от применения АБ для энергообеспечения ЭРДУ на теневых участках траектории полёта.
-
4. Окончательное решение по составу бортового оборудования может быть принято на основе комплексного подхода к оценке результатов функционирования вариантов реализации состава оборудования МБ с учётом безотказности работы системы электроснабжения МБ и ЭРДУ в течение всего срока активного существования.
Список литературы Моделирование перелёта межорбитального буксира с солнечной электроракетной двигательной установкой
- Хамиц И.И., Филиппов И.М., Буры-лов Л.С., Тененбаум С.М., Перфильев А.В., Гусак Д.И. Концепция космической транспортно-энергетической системы на основе солнечного межорбитального электроракетного буксира // Космическая техника и технологии. 2017. № 1(16). С. 32-40.
- Гусев Ю.Г., Пильников А.В., Суворов С.Е. Сравнительный анализ выбора ЭРДУ большой мощности на основе отечественных ЭРД и перспективы их применения в системах межорбитальной транспортировки и для исследования дальнего космоса // Космическая техника и технологии. 2019. № 4(27). С. 45-55.
- Салмин В.В., Старинова О.Л., Четвериков А.С., Брюханов Н.А., Хамиц И.И., Филиппов И.М., Лобыкин А.А., Бурылов Л.С. Проектно-баллистический анализ транспортных операций космического буксира с электроракетными двигателями при перелётах на геостационарную орбиту, орбиту спутника Луны и в точки либрации системы Земля - Луна // Космическая техника и технологии. 2018. № 1(20). С. 82-97.
- Ловцов А.С., Селиванов М.Ю., Томилин Д. А., Шагайда А. А., Шаш-ков А.С. Основные результаты разработок Центра Келдыша в области ЭРДУ // Известия РАН. Энергетика. 2020. № 2. С. 3-15.
- Захаренков Л.Э., Семёнкин А.В., Солодухин А.Е. Экспериментальное исследование многодвигательной системы на базе нескольких одновременно работающих электроракетных двигателей с анодным слоем // Космическая техника и технологии. 2016. № 1(12). С. 39-56.
- Грибков A.C., Евдокимов P.A., Легостаев В.П., Лопота В.А., Максимов В.А., Островский В.Г., Синявский В.В., Тугаенко В.Ю. Электроракетный транспортный аппарат для обеспечения больших грузопотоков в космосе // Известия РАН. Энергетика. 2009. № 2. С. 101-111.
- Легостаев В.П., Лопота В.А., Синявский В.В. Перспективы и эффективность применения ядерно-энергетических космических установок и ядерных электроракетных двигательных установок // Космическая техника и технологии. 2013. № 1. С. 4-15.
- Морозов А.И. Физические основы космических электрореактивных двигателей. М.: Атомиздат, 1978. Т. 1. Элементы динамики потоков в ЭРД. 328 с.
- Горшков О.А., Муравлёв В.А., Шагайда А.А. Холловские и ионные плазменные двигатели для космических аппаратов. М.: Машиностроение, 2008. 280 с.
- Островский В.Г., Смоленцев А.А., Соколов Б.А., Черашев Д.В. Электроракетная двигательная установка на основе двигателей с замкнутым дрейфом электронов на иоде // Космическая техника и технологии. 2013. № 2. С. 42-52.
- Салмин В.В. Оптимизация космических перелётов с малой тягой: Проблемы совместимости управления траекторией и угловым движением. М.: Машиностроение, 1987. 208 с.
- Гришин С.Д., Захаров Ю.А., Оде-левский В.К. Проектирование космических аппаратов с двигателями малой тяги. М: Машиностроение, 1990. 223 с.
- Онуфриева Е.В., Онуфриев В.В., Ивашкин А.Б. Физические основы построения и проектирования высокотемпературных систем преобразования тока космических энергодвигательных установок. М.: Изд-во МГТУ им. Н.Э. Баумана, 2021. 167 с.
- Раушенбах Г. Справочник по проектированию солнечных батарей: Пер. с англ. М.: Энергоатомиздат,1983. 360 с.
- АО «Сатурн». Разработка солнечных, аккумуляторных батарей и оборудования для космических аппаратов: сайт. Режим доступа: http://www. saturn-kuban.ru (дата обращения 18.11.2022).
- Ахмедов М.Р. Анализ деградации фотоэлектрических преобразователей солнечного электроракетного межорбитального буксира от ионизирующего излучения радиационных поясов Земли // Известия РАН. Энергетика. 2018. № 2. С. 109-123.
- Продукция. Стационарные плазменные двигатели // Роскосмос. АО «ОКБ "Факел"»: сайт. Режим доступа: https://fakel-russia.com/produkciya (дата обращения 18.11.2022).
- Номенклатура металлокомпо-зитных баллонов высокого давления // ЗАКБ «САФИТ»: сайт. Режим доступа: http://www.safit.info (дата обращения 18.11.2022).
- Горшков Л.К., Мосин Д.А., Тютю-кин А.Е., Уртминцев И.А. Математическое моделирование теплообмена основных элементов энергетического оборудования космических аппаратов // Информация и космос. 2017. № 2(6). С. 160-167. ЕБЫ: YZGJRX
- Горшков Л.К., Мосин Д.А., Тютю-кин А.Е., Уртминцев И.А. Моделирование конструкции космических аппаратов // Информация и космос. 2017. № 3(7). С. 147-155.
- Параметры Земли 1990 года (ПЗ-90.11): Справочный документ. Изд-во ВТУ ГШ ВС РФ, 2014. 64 с.
- ГОСТ Р 25645.166-2004. Атмосфера Земли верхняя. Модель плотности для баллистического обеспечения полётов искусственных спутников Земли. М.: ИПК Издательство стандартов, 2004. 28 с.
- ГОСТ 4401-81. Межгосударственный стандарт. Атмосфера стандартная. Параметры. М.: ИПК Издательство стандартов, 2004. 165 с.
- Монтенбрук О., Пфлегер Т. Астрономия с персональным компьютером / Пер. с нем. М.: Мир, 1993. 279 с.
