Моделирование посадки на воду возвращаемого аппарата с работающей двигательной установкой в условиях волнения

Автор: Аксенов Андрей Александрович, Дядькин Анатолий Александрович, Жаркова Валерия Владимировна, Павлов Александр Олегович, Симакова Татьяна Владимировна, Щеляев Александр Евгеньевич
Журнал: Космическая техника и технологии @ktt-energia
Рубрика: Аэродинамика и процессы теплообмена летательных аппаратов
Статья в выпуске: 3 (26), 2019 года.
Бесплатный доступ
Возвращаемый аппарат, входящий в состав разрабатываемого РКК «Энергия» пилотируемого корабля «Федерация», в штатной ситуации совершает посадку на специально подготовленные грунтовые площадки с использованием парашютно-реактивной системы. В нештатных ситуациях возвращаемый аппарат имеет возможность совершать посадку на воду. В этом случае для корректного учета нагрузок и проведения прочностных расчетов необходимо знание уровней гидродинамических воздействий на корпус аппарата и динамики его поведения в водной среде с учетом всех возможных погодных условий в районе посадки и всех возможных режимов работы парашютно-реактивной системы в нештатных ситуациях. В данной публикации представлены результаты численного моделирования посадки возвращаемого аппарата, входящего в состав пилотируемого транспортного корабля «Федерация», в условиях морского волнения. Рассмотрены случаи посадки как с работающей, так и с выключенной двигательной установкой. Приведены данные по изменению кинематических характеристик возвращаемого аппарата, действующих на него сил и моментов, а также по испытываемым им перегрузкам. Полученные данные требуются для дальнейшего анализа нагружения и прочностных расчетов конструкции корпуса аппарата.
Численное моделирование, приводнение, возвращаемый аппарат, аэродинамические характеристики, морское волнение
Короткий адрес: https://sciup.org/143172140
IDR: 143172140 | УДК: 629.788.015.087.4:532.5 | DOI: 10.33950/spacetech-2308-7625-2019-3-30-38
Simulating splashdown of a re-entry vehicle with operating propulsion system on rough water
The re-entry vehicle included into the manned spacecraft Federatsiya that is being developed by RSC Energia, nominally lands on specially prepared solid ground landing sites using a parachute-jet system. In off-nominal situations the re-entry vehicle is capable of performing a splashdown. In that case, in order to properly take into account the loads and do strength analysis, one needs to know the levels of hydrodynamic loads on the spacecraft body and its dynamic behavior in water, factoring in all the possible weather conditions at the landing site and all possible operational modes of parachute-jet system in off-nominal situations. This paper presents the results of numerical simulation of a splashdown on rough water of the re-entry vehicle included in the crew transportation spacecraft Federatsiya. It discusses both the cases where the propulsion system is firing and where it is not. It provides data on changes in kinematic properties of the re-entry vehicle, in forces and torques it is subjected to, as well as g-loads it experiences. The obtained data are required for further loading and strength analyses of the spacecraft structure.
Текст научной статьи Моделирование посадки на воду возвращаемого аппарата с работающей двигательной установкой в условиях волнения
Одним из важных вопросов, возникающих при разработке многоразовых пилотируемых кораблей, является вопрос возвращения на Землю и обеспечения мягкой посадки.
Возвращаемый аппарат (ВА), входящий в состав разрабатываемого РКК «Энергия» пилотируемого транспортного корабля нового поколения «Федерация», оснащен парашютно-реактивной системой посадки, включающей в себя двигательную установку (ДУ) [1]. Он может совершать посадку как на подготовленные и неподготовленные грунтовые площадки, так и на воду.
Исследование гидродинамических воздействий на ВА и динамики движения аппарата в процессе приводнения ведется с использованием компьютерного моделирования. Для этих целей выбран программный комплекс FlowVision [2] разработки компании ТЕСИС, который хорошо себя зарекомендовал при промышленном решении задач внешнего обтекания тел различной конфигурации, включая ВА, потоком вязкой жидкости [3]. Программный комплекс адаптирован к решению данной задачи [4] и позволяет проводить исследования аэродинамических характеристик ВА и воздействий на него в условиях перехода из воздушной среды в водную [5].
Данная статья является продолжением предыдущей [5]. Представлены новые результаты расчетов посадки на воду с работающей и неработающей ДУ в условиях морского волнения.
расчетная область и начальные параметры движения ва
Расчетная область представляет собой прямоугольный параллелепипед размерами 30×90×40 м в задаче посадки на воду с выключенной ДУ и 30×90×20 м — с работающей ДУ. В начальный момент времени верхняя треть области заполнена воздухом, а оставшаяся часть — водой (рис. 1). Продольный размер области обусловлен необходимостью уменьшить влияние граничных эффектов отражения движущихся волн на поведение ВА после приводнения на протяжении всего процесса моделирования. Высота области, заполненной в начальный момент водой, в два раза превышает расстояние между гребнями моделируемых волн, что позволяет использовать для моделирования теорию линейных волн [6]. Для ускорения расчета приводнения ВА с работающей ДУ моделирование проведено в половинной постановке, движение аппарата в поперечном направлении не учитывалось.
В расчете аппарат движется под действием аэродинамических сил, силы тяжести, а также (в случае посадки с работающей ДУ) — силы тяги двигателей, и совершает посадку на сгенерированные волны. В качестве ДУ ВА рассмотрена посадочная твердотопливная двигательная установка. Всего моделируется 15 секунд процесса посадки.
Характеристики веществ, используемые в расчете, соответствуют воде, воздуху и продуктам сгорания ДУ в случае посадки на воду ВА с работающей ДУ. Моделирование двухфазных течений (жидкость – газовые компоненты) в FlowVision осуществляется с помощью метода Volume of Fluid ( VOF ).
Возвращаемый аппарат с помощью модификатора «Подвижное тело» размещается в расчетной области в начальном положении на высоте 6 м над границей водораздела. Задается начальная вертикальная скорость аппарата V в, а также массово-центровочные характеристики. В расчетах с неработающей ДУ V в = 5,9 м/с, при этом на момент касания поверхности водораздела скорость снижения ВА приблизительно равна 8 м/с, что соответствует скорости парашютирования. В расчетах с работающей ДУ начальная вертикальная скорость аппарата до включения ДУ V в = 8 м/с, в процессе работы двигателей скорость уменьшается.
Системы координат
В программном комплексе FlowVision используется два вида систем координат: глобальная и локальная (рис. 1).
Локальная система координат связана с подвижным телом, относительно нее определяются массово-инерционные характеристики, а также аэродинамические силы и моменты, действующие на тело. В соответствии с ГОСТ 20058-2001, продольная аэродинамическая сила считается положительной, если она направлена против положительного направления оси OX системы координат, связанной с ВА.
Глобальная система координат (ГСК) неподвижна и расположена на границе водораздела вблизи центра расчетной области, относительно нее определяются поступательное движение и вращение подвижного тела, а также физические переменные.
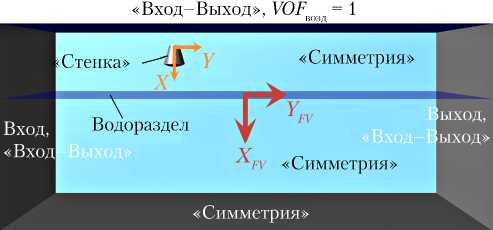
Рис. 1. Расчетная область, граничные условия и системы координат: ■ — глобальная система координат; ■ — локальная (связанная) система координат
граничные условия
Граничные условия (ГУ) представляют собой условия на физические переменные на границах расчетной области.
На нижней и боковых границах по длинной стороне расчетной области установлено ГУ «Симметрия». На верхней и оставшихся двух боковых границах установлено ГУ «Вход–Выход» с значением переменной VOF соответствующих фаз, равным единице (рис. 1).
На поверхности аппарата ставится граничное условие «Стенка». В расчете посадки на воду ВА с работающей ДУ на входных сечениях внутри камеры каждого из сопел задается ГУ «Вход– Выход». Давление и температура внутри камеры соответствуют параметрам моделируемой ДУ.
Моделирование гидростатики осуществляется явным заданием полного давления для воды на боковых границах по формуле p = ρ H2O gx + ρ возд gh возд, где ρ H2O = 1 000 кг/м3 — плотность H2O; h возд = 11 м — высота столба воздуха; g — ускорение свободного падения; x — координата точки жидкости в ГСК.
расчетная сетка
Начальная сетка — неравномерная, со сгущением вблизи поверхности водораздела. Размерность сетки составляет 1,3 млн ячеек.
По поверхности аппарата, а также в объеме расчетной области в районе приводнения проводится локальная адаптация (сгущение) сетки. Приповерхностная адаптация размерностью 500 000 ячеек включается после начала движения ВА и перестраивается на каждом этапе расчета согласованно с его перемещением. Адаптация в районе приводнения повышает размерность сетки на 2,5 млн ячеек и включается в момент касания аппаратом поверхности водораздела.
В расчетах посадки на воду ВА с работающей ДУ производится дополнительная адаптация расчетной сетки в области движения продуктов сгорания и в камере сопла. Поскольку введение этих адаптаций значительно повышает размерность сетки (до 6 млн ячеек), расчет посадки на воду ВА с работающей ДУ производился в половинной постановке (плоскость симметрии OXFVYFV ).
теория линейных волн
Для моделирования морского волнения используется теория линейных волн Эйри для глубокой воды [6], согласно которой поля скоростей и давлений — решения уравнений Навье–Стокса для невязкой несжимаемой жидкости со свободной поверхностью в канале постоянной глубины — выглядят следующим образом:
H u = 2 σ
cosh k ( h – x ) sinh kh
cos( ky – σ t),
H sinh k ( h – x )
w = 2 σ sinh k h sin( ky – σ t),
H cosh k ( h – x )
p = Р„ O gx + р g у a cosh kh cos( ky - a t ).
Здесь {u, v} — компоненты вектора скорости в направлении {OX, OY} ГСК; k = 2π/λ — волновое число; λ = 10 м — длина волны (расстояние между «гребнями»); H = 3 м — высота волны; h = 21,5 м — глубина канала жидкости; ρH2O = 1 000 кг/м3 — плотность воды; g — ускорение свободного падения; x, y — координаты точки жидкости в ГСК.
Круговая частота σ связана с волновым числом K законом дисперсии для линейных волн:
σ 2 = gk tanh kh .
Скорость волны определяется ее длиной σg v = k ≈ k и равна 4 м/с при расстоянии между «гребнями» волны 10 м.
Амплитуда волны, соответствующая заданной скорости, берется из статистических данных по волнению в районах посадки. Среднегодовая высота волн в акваториях посадки (районы Охотского моря и Атлантического океана) не превышает 1 м, а максимальная может достигать 20 м. Выбранная для моделирования высота волны 3 м соответствует шести баллам по шкале Бофорта.
Величина воздействий на аппарат может оказаться различной в зависимости от фазы волны в месте приводнения. В данной работе представлены результаты моделирования посадки ВА как на гребень, так и во впадину волны.
генерация волн в расчете
Генерация волн осуществляется путем задания модификатора переменной «скорость» через формулы поля скоростей вблизи границы расчетной области в объеме параллелепипеда толщиной не более одной ячейки расчетной сетки, расположенного на входе в расчетную область. Задается только компонента скорости u в направлении оси OY ГСК.
Для обеспечения согласованности движения фаз вблизи поверхности водораздела в начальный момент времени также задается скорость движения воздуха в направлении оси OY , равная 4 м/с.
прочие ограничения расчета
Конструкция аппарата предполагается абсолютно жесткой (недеформируемой), вследствие чего оценочные значения перегрузок, получаемых в процессе расчета, могут оказаться заниженными [7].
При моделировании не учитываются фазовые переходы: предполагается, что при взаимодействии с высокотемпературными продуктами сгорания ДУ вода не испаряется и не закипает.
Шаг по времени
Шаг по времени в расчете неравномерный и задается числами Куранта– Фридрихса–Леви (КФЛ) [2]. Конвективное число КФЛконв отвечает за скорость решения уравнений переноса фаз и равно 3. Поверхностное число КФЛпов отвечает за скорость решения уравнения свободной поверхности и равно 1.
расчетные ресурсы
Для расчета используется кластер. Для моделирования первых 15 с процесса посадки ВА с неработающей ДУ (формирование волн) использовано шесть процессоров, средняя величина шага по времени при этом равна 0,015 с, а длительность расчета одного шага — 50 с. Для моделирования второй половины расчета (движение ВА) использовано восемь процессоров, средняя величина шага по времени при этом составляет 0,001 с, а длительность расчета одного шага — 54 с.
Моделирование 30 с посадки занимает 240 ч реального времени.
анализ результатов
Характеристики записаны на каждом расчетном шаге, при этом шаг по времени меняется неравномерно. Данные по силам (рис. 2), моментам (рис. 3), кинематическим характеристикам (рис. 4) и перегрузкам (рис. 5) представлены в усредненном виде с шагом по времени 0,002 с (характерная продолжительность ударного процесса) с целью исключить всплески, вызванные ошибкой численных методов.
Отмечается, что случай посадки с неработающей ДУ во впадину волны менее благоприятен, чем случай посадки на гребень, поскольку в последнем случае силы и моменты, действующие на ВА со стороны среды, в два раза ниже в сравнении с первым случаем.
На рис. 6, 7 представлены кинограммы процесса посадки ВА на воду в случае с неработающей ДУ. При заданных массово-инерционных характеристиках ВА сохраняет устойчивое положение после посадки в условиях морского волнения.
При посадке ВА на воду с работающей ДУ наблюдается значительный (в 1,5–3 раза и больше) рост пиковых значений таких характеристик, как давление, сила и моменты, действующие на ВА со стороны среды, в сравнении с приводнением с выключенной ДУ. Возможной причиной может быть характер движения жидкости после взаимодействия со сверхзвуковыми струями продуктов сгорания: потоки газа, исходящие из посадочной твердотопливной ДУ под значительным углом к оси ВА, формируют в воде каверны, которые затем схлопываются с образованием в центре протуберанца, движущегося навстречу ВА (рис. 8).
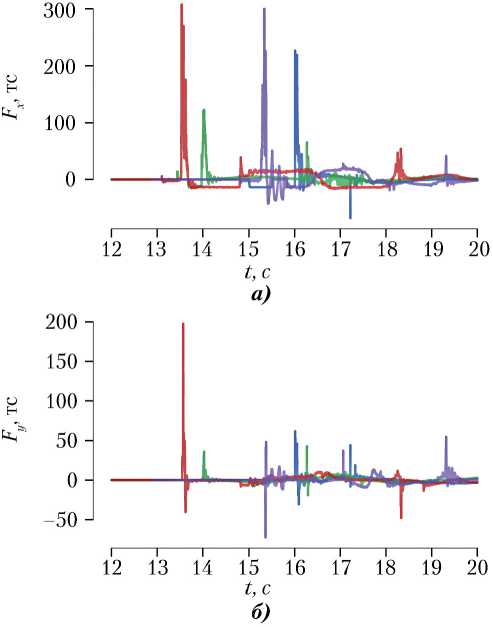
Рис. 2. Продольная (а) и нормальная (б) силы, действующие на возвращаемый аппарат со стороны среды при посадке на волны: ■ — двигательная установка (ДУ) работает, посадка на гребень волны; ■ — ДУ работает, посадка во впадину волны; ■ — ДУ не работает, посадка на гребень волны; ■ — ДУ не работает, посадка во впадину волны
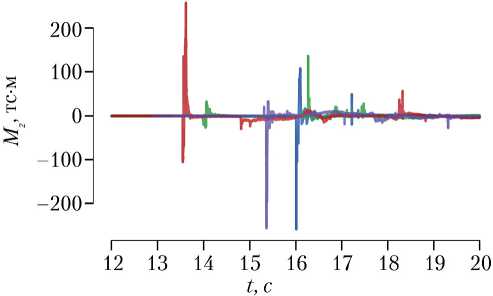
Рис. 3. Момент тангажа, действующий на возвращаемый аппарат со стороны среды при посадке на волны: ■ — двигательная установка (ДУ) работает, посадка на гребень волны; ■ — ДУ работает, посадка во впадину волны; ■ — ДУ не работает, посадка на гребень волны; ■ — ДУ не работает, посадка во впадину волны
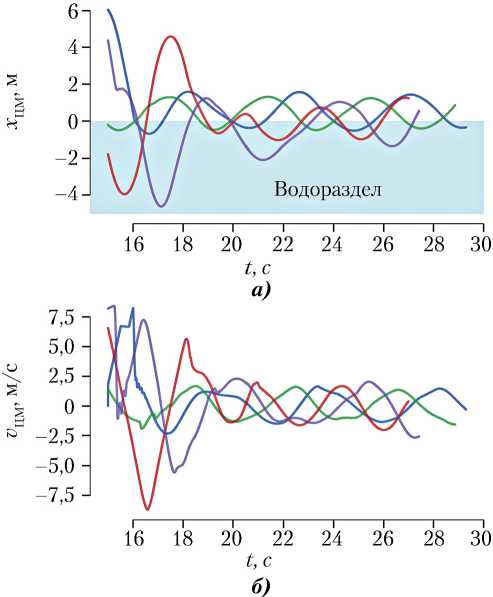
Рис. 4. Координата (а) и скорость центра масс (б) возвращаемого аппарата при посадке на волны: ■ — двигательная установка (ДУ) работает, посадка на гребень волны; ■ — ДУ работает, посадка во впадину волны; ■ — ДУ не работает, посадка на гребень волны; ■ — ДУ не работает, посадка во впадину волны
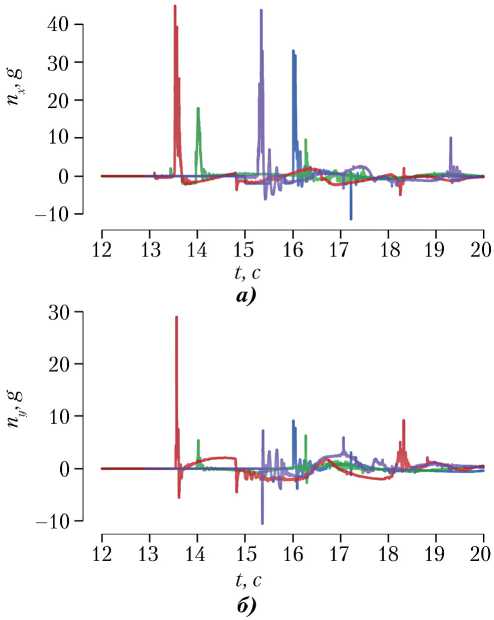
Рис. 5. Продольная (а) и нормальная (б) перегрузки, испытываемые возвращаемым аппаратом при посадке на волны: ■ — двигательная установка (ДУ) работает, посадка на гребень волны; ■ — ДУ работает, посадка во впадину волны; ■ — ДУ не работает, посадка на гребень волны; ■ — ДУ не работает, посадка во впадину волны
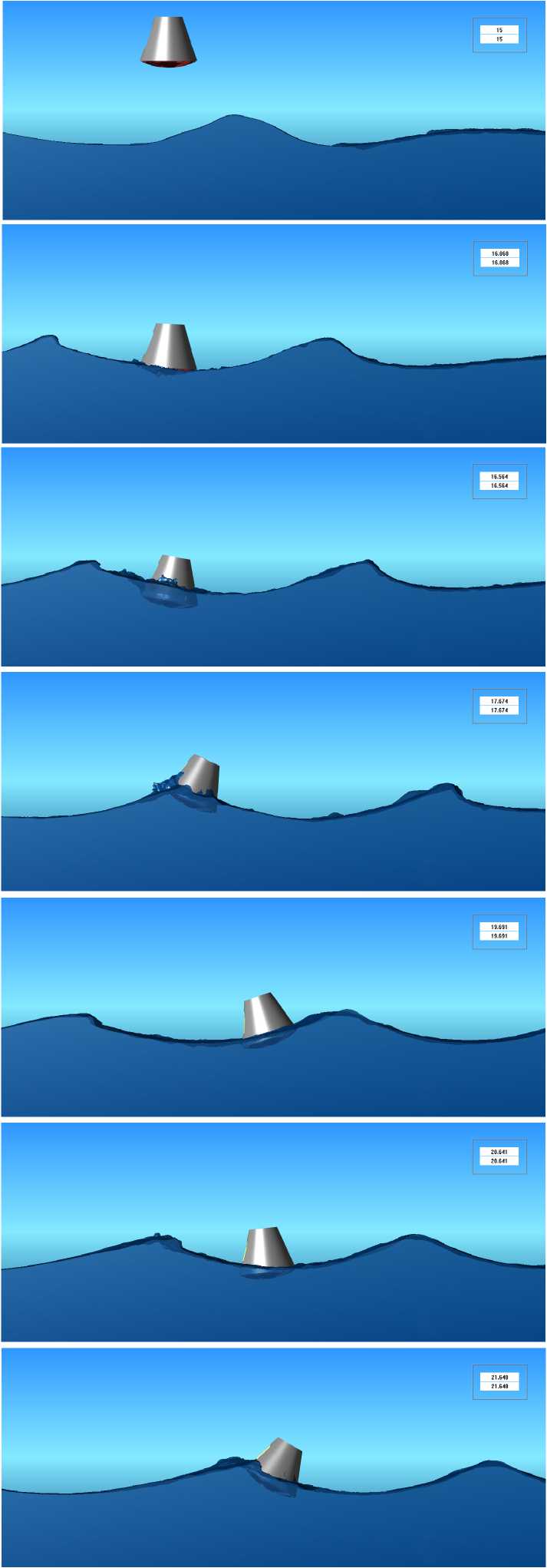
Рис. 6. Кинограмма процесса посадки возвращаемого аппарата с неработающей двигательной установкой во впадину волны
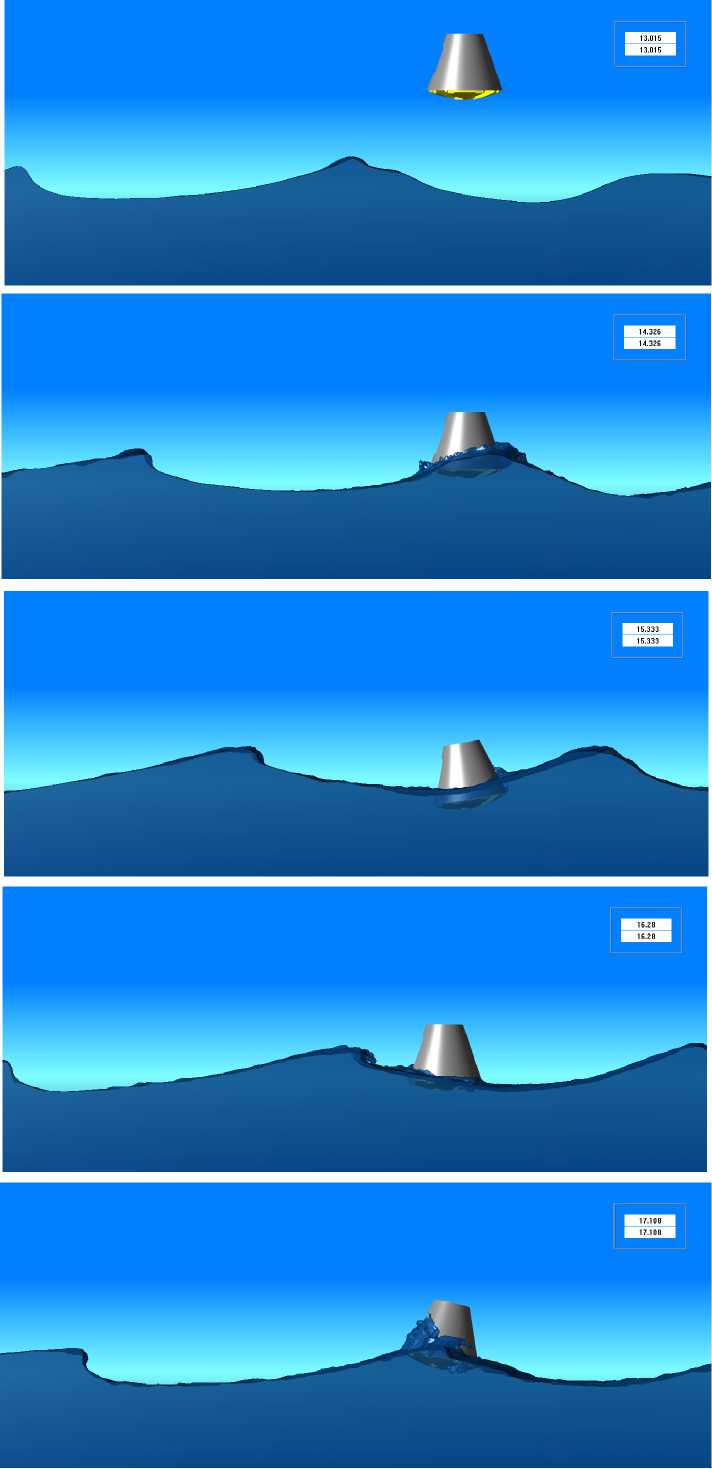
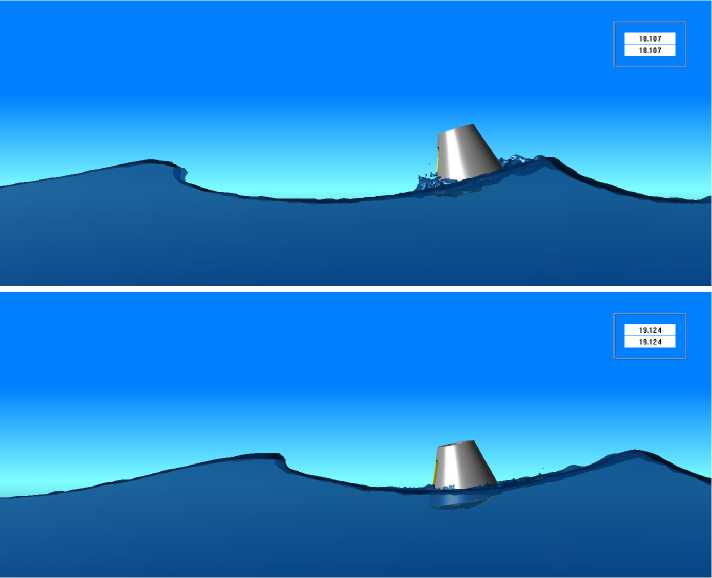
Рис. 7. Кинограмма процесса посадки на воду возвращаемого аппарата с неработающей двигательной установкой на гребень волны
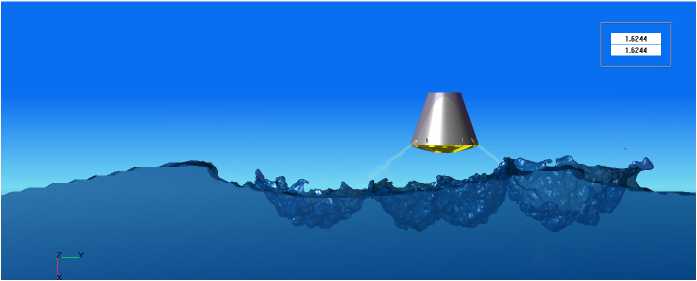
Рис. 8. Визуализация процесса посадки возвращаемого аппарата с работающей двигательной установкой во впадину волны в процессе расчета
Амплитуда возмущений поверхности водораздела после взаимодействия с продуктами сгорания в несколько раз превышает высоту волн, заданную при моделировании. При этом значения давления по площади смачиваемой поверхности экрана агрегатного отсека ВА при посадке во впадину волны с работающей ДУ более чем в два раза превышают реализующиеся при посадке на гребень волны (рис. 9).
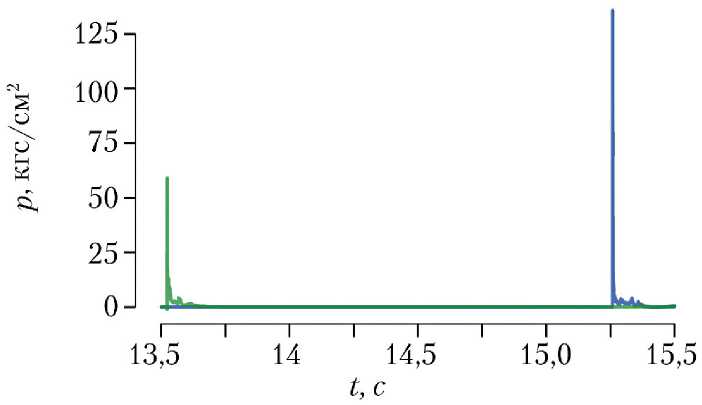
Рис. 9. Избыточное давление по смачиваемой поверхности экрана агрегатного отсека возвращаемого аппарата при посадке с работающей двигательной установкой на волны: ■ — посадка на гребень волны; ■ — посадка во впадину волны
заключение
С помощью программного комплекса FlowVision проведено моделирование посадки возвращаемого аппарата пилотируемого транспортного корабля «Федерация» на водную поверхность с работающей или неработающей ДУ в условиях морского волнения.
В процессе моделирования определены силы и моменты, действующие на аппарат при посадке, а также его кинематические характеристики.
Выявлено, что посадка возвращаемого аппарата на воду в условиях морского волнения, вследствие больших воздействий среды и непредсказуемого поведения ВА после приводнения, является одним из основных расчетных случаев при анализе прочности конструкции корпуса и остойчивости ВА.
Выявлено, что в случае посадки ВА на волны с неработающей ДУ аппарат испытывает меньшие воздействия по сравнению с посадкой с работающей ДУ.
Для нахождения максимальных значений воздействий на возвращаемый аппарат требуется проведение моделирования посадки на воду во всем диапазоне начальных параметров его движения: угла тангажа (-0^40 ° ), горизонтальной скорости (~0…15 м/с) и скорости снижения (~0…9,8 м/с).
С целью минимизации воздействий на ВА при посадке на воду с работающей ДУ необходим поиск оптимальных циклограмм работы двигателей.
Список литературы Моделирование посадки на воду возвращаемого аппарата с работающей двигательной установкой в условиях волнения
- Антонова Н.П., Брюханов Н.А., Четкин С.В. Средства посадки пилотируемого транспортного корабля нового поколения // Космическая техника и технологии. 2014. № 4(7). С. 21-30.
- FlowVision. Руководство пользователя. Версия 3.09.05. М.: ООО "ТЕСИС", 2015. 1272 c.
- Аксенов А.А., Дерюгин Ю.Н., Дядькин А.А., Жлуктов С.В., Козелков А.С., Сушко Г.Н., Шишаева А.С. Численное моделирование до- и сверхзвукового обтекания тел, произвольно движущихся друг относительно друга. // Материалы XIII международного семинара "Супервычисления и математическое моделирование", ИПК ФГУП "РФЯЦ-ВНИИЭФ", 3-7 октября 2011, Саров, Россия, 2011. С. 26-39.
- Дядькин А.А., Павлов А.О., Симакова Т.В. Сравнительный анализ расчетных и экспериментальных исследований гидродинамических воздействий на модель возвращаемого аппарата с неработающей двигательной установкой при посадке на воду // Космическая техника и технологии. 2017. № 3(18). С. 15-23.
- Аксенов А.А., Дядькин А.А., Павлов А. О., Симакова Т.В., Скороваров А.Ю., Щеляев А.Е. Расчетные исследования гидродинамических воздействий на возвращаемый аппарат при посадке на водную поверхность // Космическая техника и технологии. 2016. № 3(14). С. 5-14.
- Чижиумов С.Д. Основы динамики судов на волнении: учебное пособие. М.: ГОУВПО "КнАГТУ", 2010. 110 с.
- Wang J.T., Lyle K.H. Simulating space capsule water landing with explicit finite element method // AIAA-2007-1779, Proceedings of the 48th AIAA/ASME/ASCE/ AHS/ASC Structures, Structural Dynamics, and Materials Conference, 23-26 April 2007, Honolulu, Hawaii.
