Моделирование поведения водителя при управлении автотранспортным средством

Автор: Скрыпников А.В., Кондрашова Е.В., Скворцова Т.В., Чистяков А.Г.
Журнал: Вестник Воронежского государственного университета инженерных технологий @vestnik-vsuet
Рубрика: Информационные технологии, моделирование и управление
Статья в выпуске: 1 (63), 2015 года.
Бесплатный доступ
В статье выполнено поэтапное формирование образов и действий водителя. В изложенных рассуждениях авторы исходили из следующих предположений: рассматривалось движение массовых, серийно выпускаемых в настоящее время отечественной промышленностью автомобилей; рассматривалось движение одиночных автомобилей, как наиболее типичных и наиболее опасных случаев, позволяющих оценить влияние параметров дороги на режим движения "в чистом виде"; водители стремятся к сокращению времени поездки и потому движутся с максимально-возможной скоростью; водители выбирают скорость движения, зрительно оценивая лежащий впереди участок пути и учитывая скорость к моменту этой оценки; поведение водителя при прочих равных условиях определялось влиянием ограничения видимости и условиями зрительного восприятия; рассматривалось движение на подъём и спуск, но определяющим являлось направление спуска. Совокупность операций, ответвляемых водителем, можно представить как многоуровневую систему, содержащую три основные группы психофизиологических процессов: деятельность анализаторов (восприятие информации); работа центральной нервной системы (переработка и хранение информации); эффективная деятельность (ответные действия по реализации принятого решения). На основании принятой информации в сознании человека формируются образы внешней среды, совокупность которых составляет информационную модель объекта. Сравнивая ее с эталонами (энграммами памяти), водитель вырабатывает наиболее целесообразный в данных условиях комплекс действий. Реализация принятого решения является заключительным этапом реакции человека на внешнюю среду и выражается в изменении степени использования силы тяги двигателя или тормозной силы; изменение положения управляемых колес, как не отражающееся на скорости движения, можно в алгоритме работы водителя не учитывать. Анализ представленных схем алгоритмов позволяет получить количественные характеристики процесса движения автомобиля: показатели стереотипности, логической сложности.
Моделирование, скорость, автомобильная дорога, алгоритм, водитель, внешняя среда, параметры дороги, коррекция скорости
Короткий адрес: https://sciup.org/14040395
IDR: 14040395 | УДК: 630.383
Modeling driver behavior in the management of their motor vehicle
The article holds the gradual formation of images and actions of the driver. As outlined the author's arguments based on the following assumptions: We consider the motion of the mass, mass-produced currently by the domestic industry of automobiles; considered the motion of single cars as the most common and most dangerous cases, allowing to evaluate the influence of parameters on the road driving mode "pure"; drivers tend to reduce travel times and therefore move with the maximum possible speed; drivers choose speed, visually estimating lying in front of part of the way and given the speed at the time of this evaluation; driver behavior, ceteris paribus determined the influence of visibility limitations and conditions - visual perception; considered the motion on the ascent and descent, but the determining factor is the direction of descent. Set of operations, branches off the driver, can be represented as a multi-level system comprising three main groups of psycho-physiological processes, activities analyzers (perception of information); the work of the central nervous system (processing and storage); effective activity (responses to the implementation of the decision). On the basis of the received information in human consciousness formed images of the environment, the totality of which is an information model of the object. Comparing it with the standards (memory engrams), the driver generates the most appropriate in the circumstances set of actions. Implementation of the decision is the final stage of human response to the external environment and is expressed in the change of the degree of use of traction engine or braking force; change the steering angle as that does not affect the speed of motion, the algorithm of the driver is not taken into account. Analysis of the schemes of algorithms allows to obtain quantitative characteristics of the vehicle: stereotyped figures, logical complexity.
Текст научной статьи Моделирование поведения водителя при управлении автотранспортным средством
Рассмотрим на некоторый момент времени движения автомобиля случайным образом принятую систему отсчета расстояния, причем х=0 в той точке n , в которой находится вначале автомобиль и которая совпадает с началом первого из двух элементов трассы. Предположим, что элемент № 1 есть плоский спуск со следующими параметрами: ширина проезжей части равна В, продольный уклон i 1 , длина l ; элемент № 2 - плоская кривая с параметрами: угол поворота а 1 , радиус в плане R2 , продольный уклон i , уклон виража i , расстояние от кромки проезжей части до бокового ограничения видимости (боковой клиренс) 5 2 .
Мгновенное значение скорости движения автомобиля в точке х=0 примем равным некоторой величине V , меньшей, чем предельная, психологически безопасная V , т.е. V < Vnnб . На оценку условий движения водитель затрачивает время, которое можно принять равным среднему времени сложной реакции водителя, т.е. t =1,5 с [1-3]. За это время автомобиль переместится в точку n , удаленную от точки на расстояние x = Vot . Дальнейшие действия водителя и режим движения определяется результатами этой оценки.
Если начальная скорость меньше максимально возможной V , водитель увеличивает скорость до величины V , которую можно определить по формуле .равноускоренного движения:
V = V o + at , (1) где a - величина продольного ускорения, которую можно принимать равной 0,5-1,0, м/с2; t - время коррекции скорости, с.
Время t зависит от разности скоростей V и V , а также от длины элемента №1: при его длине менее 100 м водитель не приступает к коррекции скорости, а сразу переходит к оценке условий движения на элементе №2 (рисунок 1, 2).
Практически одновременно с коррекцией скорости водитель сравнивает оставшуюся часть пути на элементе №1 с зоной влияния элемента №2; если она больше длины зоны Z 2 , то водитель вновь сравнивает величины скоростей V и V принимает решение о возможности увеличения скорости. Если же длина пути до элемента №2 меньше или равна Z2 , то водитель приступает к зрительной оценке дорожных условий и планированию скорости движения на элементе №2.

начало

Инициализация переменных
|
4 Оценка длины прямой |
|
Проезд до зоны влияния кривой |
|
6 Проезд в зоне влияния кривой |
|
7 Проезд по кривой |
Рисунок 1. Блок-схема расчёта скорости движения в плане
Изложенное, как мы видим, представляет собой поэтапное формирование образов и действия водителя. Коррекция скорости на элементе №1 осуществляется как бы "порционно" в течение достаточно малого промежутка времени t . Его величина 1,5 с определяется тем, что дифференциальный порог различения скорости движения равен около 5 км/ч или 1,4 м/с, а при практически реализуемой величине ускорения, не превышавшей 1 м/с, для изменения скорости на величину этого порога требуется не менее 1,5 с. За время t автомобиль переместится в точку n 2 , удаленную от начала отсчета на расстояние, равное S = Vt + at 2.
начало
4.2 x:=0;T:=0;L:=0;
V=V 0 ; t:=1.5; n:=1



B n , l n , R n , α n , i вп , δ n

4.4

L:=L+ l n n:=n+1
B n , l n , R n , α n , i вп , δ n

4.6 Z k :=φ(J,δ);
S:=V·t
X:=X+S; T:=T+t
4.7
Печать X,V

Рисунок 2. Модуль расчёта скорости движения на прямолинейном элементе. Оценка длины прямой
Оставшаяся часть длины элемента №1 в этом случае равна:
m = t 1 - X 2 (2)
Если величина m больше длины зоны влияния элемента №2, равной Z , операция коррекции скорости повторяется. Автомобиль при этом перемещается в точку n3 , удаленную от начала отсчета на расстояние x3 = x2 + 5. Операцию коррекции скорости повторяют до тех пор, пока скорость движения не станет равной Vппб или пока расстояние m станет равным Z . Блок-схема программы расчёта скорости движения на прямолинейном элементе представлена на рисунках 2 и 3.
В точке n , удаленной от конца элемента №1 на x m , характер работы водителя и режим движения автомобиля изменяются. На основании зрительной оценки крутизны элемента №2 у водителя вырабатывается представление о психологически безопасной скорости его проезда V . Поскольку средняя продолжительность фиксации взгляда равна 0,5 с [4], зрительная оценка формируется за 6 этапов, из которых три используют непосредственно для оценки кривой, а прочие – для контроля положения автомобиля на проезжей части в данный момент.
В целях алгоритмирования первые три этапа могут быть объединены - за первые 1,5 с произойдет оценка сложности кривой и возможной скорости V . За это время автомобиль переместится на расстояние, равное 5 = V m • t , где Vm - скорость автомобиля в точке nm , м/с. К концу процесса установления скорости V автомобиль переместится в следующую точку n m + i, удаленную от начала отсчета на расстояние x m + 1 = x m + 5 , в которой водитель приступает к коррекции скорости с целью довести ее к концу элемента №1 до величины Vппб , делая это "порционно".
Для этого используют торможение двигателем, причем автомобиль движется равнозамедленно с отрицательным ускорением, зависящим от величины продольного уклона. Среди исследователей нет единого мнения о допустимой величине этого замедления; по разным данным ее рекомендуют принимать в диапазоне от 0,7 до 4 м/с2 . Например, в [4] в качестве порога комфорта предложено замедление ±0,25 q или 2,45 м/с2, а за предел удобной езды принимают ±0,75 q или 7,85 м/с2. В настоящее время в России и за рубежом считают, что элементы дороги должны обеспечивать безопасность проезда без применения колесных тормозов только с торможением двигателем [2-3]. По нашим наблюдениям и данным, при торможении двигателем в неаварийной ситуации следует рекомендовать замедление в размере 0,5-1,0 м/с2. Считая движение при коррекции равнозамедленным, скорость через время t можно определить по формуле Vt = V m + 1 + at .
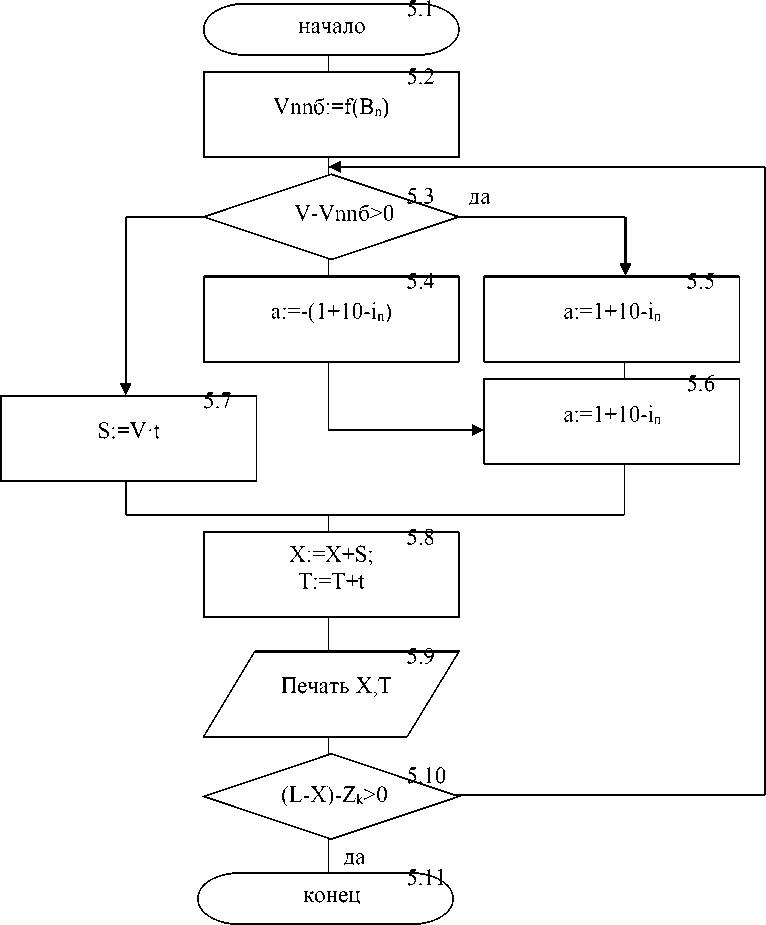
Рисунок 3. Модуль расчёта скорости движения на прямолинейном элементе. Блок проезда прямой до зоны влияния впереди лежащей кривой в плане
За время и автомобиль пройдет расстоя-
At 2
ние, равное 5 = Vm• t +• При этом ав томобиль переместится в точку nm+2 и уда- ленную от начала на расстояние xm+2 = xm+1 + 5 •
Коррекция скорости продолжается, пока скорость не станет равной психологически безопасной, или пока расстояние до элемента №2 не станет равно нулю в точке n2 , удаленной от начала на расстояние x^ = l. Блок- схема расчета скорости движения в зоне влияния впереди лежащей кривой (рисунок 4).
Точно оценить максимальную безопасную скорость проезда кривой на основе только зрительной оценки на участке подхода практически невозможно; ошибка водителей может достигать 30-50 %. На точность оценки водителем этой скорости оказывает отрицательное влияние продольный уклон, приводящий к уменьшению замедления, обеспечиваемого торможением двигателем. Окончательную корректировку водители производят по центробежному ускорению, видимой угловой скорости перемещения точек фиксации взгляда и видимой крутизне поворота [1-3]. На основе этих ощущений вырабатывается новое представление о возможной скорости проезда кривой. Однако скорость в точке n чаще всего оказывается больше V и потому водитель вынужден при коррекции скорости применять режим совместного торможения.
За время оценки условий движения на элементе №2 автомобиль пройдет расстояние
S = V i t и переместится в точку n^ р удаленную от начала отсчета на x^ + = X i + S , здесь продолжается равнозамедленное движение с "порционным" корректированием скорости по интервалам времени t =1,5 с, продолжающееся до момента, когда скорость станет равной психологически безопасной, т.е. до V = У пб .
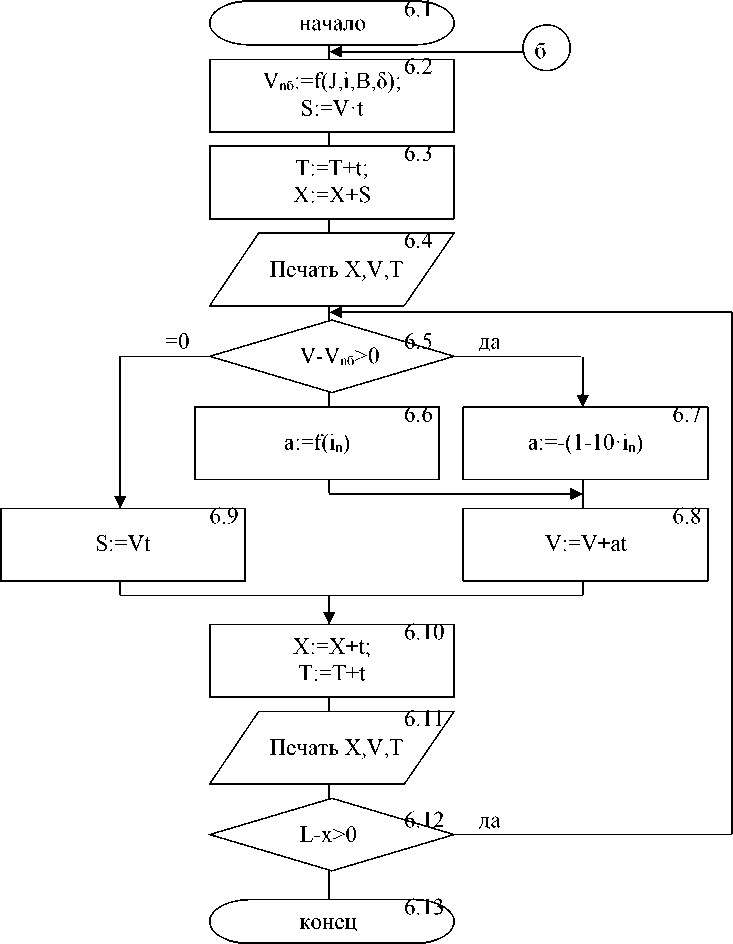
Рисунок 4. Модуль расчёта скорости движения на прямой в зоне влияния впереди лежащей кривой
Если вместо спуска имеет место подъем, то нет надобности замедлять движение с помощью колесных тормозов, т.к. длины пути перед въездом на кривую оказывается всегда достаточными для замедления путем торможения двигателем. В остальном, расчет происходит по той же схеме. Блок-схема этого расчета показана на рисунке 5. Таким образом, совокупность операций, ответв- ляемых водителем, можно представить как многоуровневую систему, содержащую три основные группы психофизиологических процессов: деятельность анализаторов (восприятие информации); работа центральной нервной системы (переработка и хранение информации); эффективная деятельность (ответные действия по реализации принятого решения).
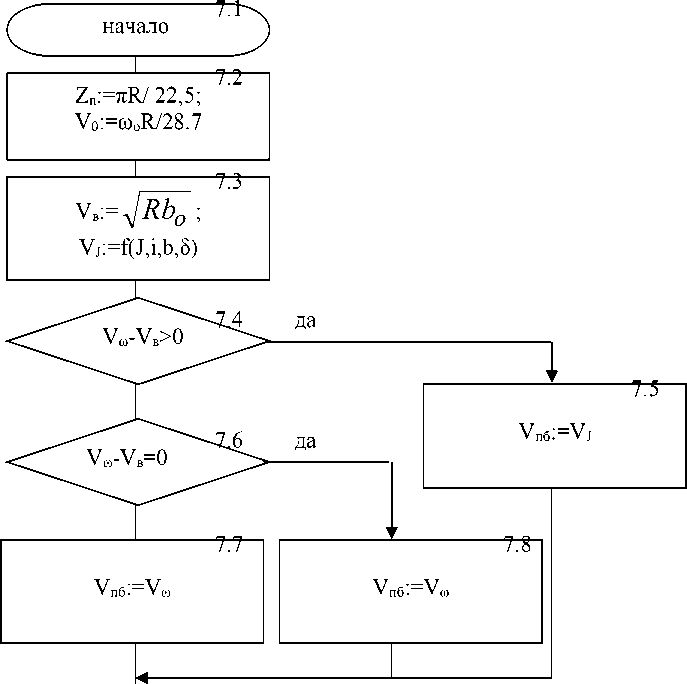
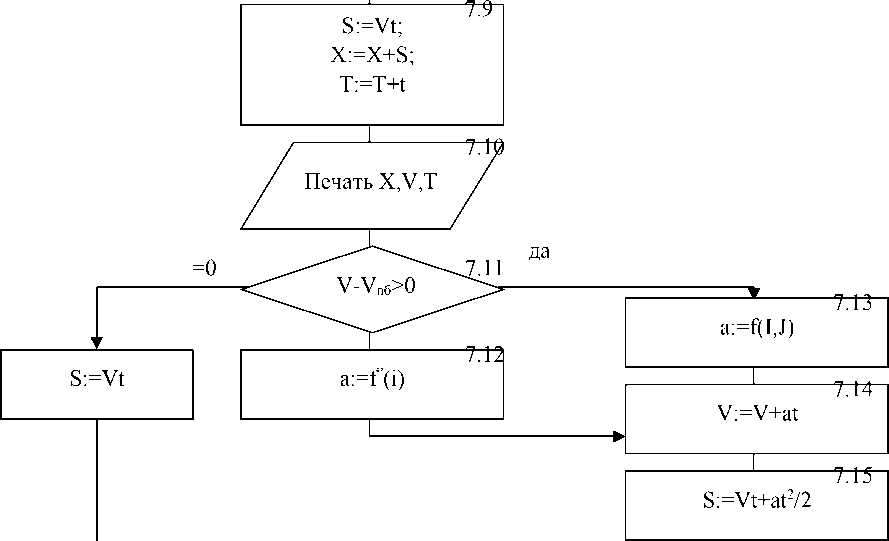

Рисунок 5. Модуль расчёта скорости движения на кривой в плане (начало)

7.11
7.17
X:=X+S; T:=T+t
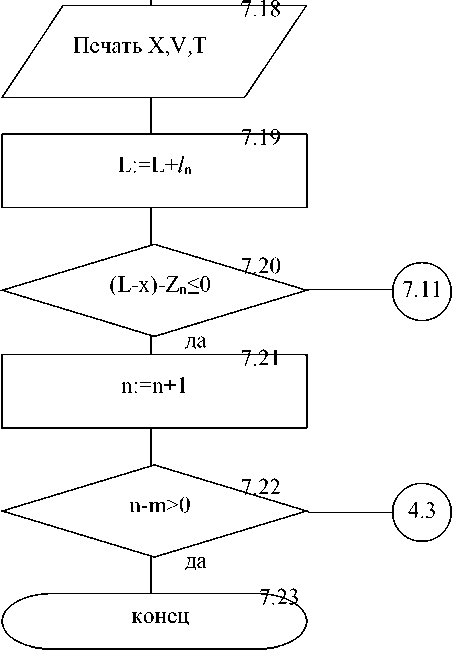
Рисунок 5. Модуль расчёта скорости движения на кривой в плане (окончание)
На основании принятой информации в сознании человека формируются образы внешней среды, совокупность которых составляет информационную модель объекта. Сравнивая ее с эталонами (энграммами памяти), водитель вырабатывает наиболее целесообразный в данных условиях комплекс действий. Реализация принятого решения является заключительным этапом реакции человека на внешнюю среду и выражается в изменении степени использования силы тяги двигателя или тормозной силы; изменение положения управляемых колес, как не отражающееся на скорости движения, можно в алгоритме работы водителя не учитывать.
В изложенных рассуждениях мы исходили из следующих предположений:
-
1) рассматривается движение массовых, серийно выпускаемых в настоящее время отечественной промышленностью автомобилей;
-
2) рассматривается движение одиночных автомобилей, как наиболее типичный и наиболее опасный случай, позволяющий оценить влияние параметров дороги на режим движения "в чистом виде";
-
3) водители стремятся к сокращению времени поездки и потому движутся с максимально-возможной скоростью;
-
4) водители выбирают скорость движения, зрительно оценивая лежащий впереди участок пути и учитывая скорость к моменту этой оценки;
-
5) поведение водителя при прочих равных условиях определяется влиянием ограничения видимости и условиями - зрительного восприятия;
-
6) рассматривается движение на подъём и спуск, но определяющим является направление спуска.
Анализ схем алгоритмов позволяет получить количественные характеристики процесса: показатели стереотипности, логической сложности.
Список литературы Моделирование поведения водителя при управлении автотранспортным средством
- Методы, модели и алгоритмы повышения транспортно-эксплуатационных качеств лесных автомобильных дорог в процессе проектирования, строительства и эксплуатации / А. В. Скрыпников, Т. В. Скворцова, Е. В. Кондрашова, А. И. Вакулин, В. Н. Логачев. - М. : Флинта : Наука, 2012. - 310 с.
- Пропускная способность регулируемого перекрестка/В. К. Курьянов, Е. В. Кондрашова, Т. В. Скворцова, А. В. Скрыпников//Перспективные технологии, транспортные средства и оборудование при производстве, эксплуатации, сервисе и ремонте: межвузовский сборник научных трудов/под ред. В. И. Посметьева; ВГЛТА. -Воронеж, 2007. -Вып. 2. -С. 201-204.
- Заикин А.Н. О влиянии межоперационных запасов на работоспособность комплекта лесосечных машин/А.Н. Заикин, Каштенков А.Д.//Вестник Красноярского государственного аграрного университета. 2010. №1. С. 15-21.
- Рябова О.В., Манохин М.В. Критерии оценки зрительного восприятия водителем до-рожной обстановки//Научный вестник Во-ронежского государственного архитектурно-строительного университета. Строительство и архитектура. 2012. №2. С. 96-107.
