Моделирование поверхностей в системе компьютерной математики Mathcad

Автор: Дубанов А.А., Мотошкин П.В.
Журнал: Вестник Восточно-Сибирского государственного университета технологий и управления @vestnik-esstu
Статья в выпуске: 3 (42), 2013 года.
Бесплатный доступ
В данной статье рассматриваются вопросы моделирования поверхностей. Подробно разбирается моделирование поверхностей вращения, их движение в пространстве, построены анимированные изображения. Особое внимание уделено созданию локального базиса, его динамике, ориентации в пространстве. Каждая решенная задача в статье имеет исходный код.
Моделирование поверхностей, компьютерная математика
Короткий адрес: https://sciup.org/142142673
IDR: 142142673 | УДК: 515.2
Surface modeling in Mathcad computer mathematics
The article deals with surface modeling, modeling of rotary surfaces, their movement in space and animated images. Special attention is paid to creating a local basis, its dynamics and its orientation in space. Each solved problem in the article has its source code.
Текст научной статьи Моделирование поверхностей в системе компьютерной математики Mathcad
Многие инженерные задачи связаны с конструированием, кинематикой и анимацией поверхностей, в том числе поверхностей, где присутствуют элементы вращения. В связи с этим разработчики вынуждены вникать в пространственные задачи преобразования поверхностей, что не является их непосредственной функцией. Данная статья не претендует на универсальность подхода к решению моделирования поверхностей вращения, но иллюстрирует, что при сложности поставленной задачи некоторые моменты можно наглядно продемонстрировать в системах компьютерной математики (в данном случае MathCAD 11).
Вращение параметрической кривой вокруг прямой, произвольно расположенной в пространстве
Рассмотрим простую задачу: получить уравнение поверхности вращения произвольной параметрической кривой вокруг прямой, произвольно расположенной в пространстве.
Вращаемая параметрическая кривая задана в виде: R(t) _
x(t)
y(t)
. Ось вращения задана двумя
z(t)
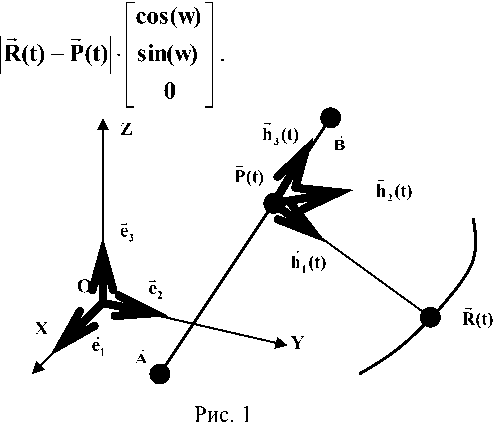
точками A и B (рис. 1). Основанием перпендикуляра, опущенным из точки R(t) на прямую
- . . ( r (t) -A ) • (в - A) - -
A B , будет точка P(t) = A -I-- - —--- -—- — (B - A) . Определим локальный базис для
" (B-A) (B-A)
каждой отдельной точки R(t) . Это тройка векторов (h1(t),h2(t),h3(t) ) с центром координат в
- - R(t) — P(t) — B_ A — точкеP(t), где hj(t) = — ---.., h3(t) = ——4, h2(t) = h3(t)xhj(t).Если мы захотим вра-
I R(t)-P(t)| |b-a|
—— —— —— —— —— щать точку R(t) вокруг точки P(t) в системе координат (h1(t),h2(t),h3(t)) , то это будет пло- ская окружность s (w, t) =
Перенос окружности в систему координат (OXYZ)
и вращение непосредственно во-
—— круг точки P(t) осуществляется следующим образом: S(w, t)
— is (t) — (w, t)
— 2s (t) — (w,t)
e 3s (t) s (w,t)
——
P(t) .
Базис (MtM 2 S (t ),e 3s (t)) рассчитывается по формулам: — х s(t) =
— 2s (t) =
—— e2
—— e2
—— e2
—— h1(t)
—— h2(t)
—— h3(t)
—
,
—
координат
— 3s (t) =
—— e3
—— e3
—— e3
—— h1(t)
—— h2(t)
—— h3(t)
—
—— e1
—— e1
—— e1
—— h1(t)
—— h2(t)
—— h3(t)
,
, так векторы (—1 ,е2 ,е3) будут выглядеть из системы
(h 1 (t),h 2 (t),h 3 (t) ). Базисные векторы ( — ,e2, e,) системы координат (OXYZ) (см.
рис. 1) имеют значения e2 =
,
—— e2
,
—— e3
. Более подробно вопросы преобразова-
ния базиса рассмотрены на интернет-ресурсе во вкладке «Преобразование базиса». Ниже приведен листинг программы, выполненной в системе MathCAD 11.
В :=
2 I f °
3 R(f) := sin(2f) + 3
5 J \ 3cos(f)
P(>a+MM(IM
(B-A)(B-Aj '
Входные данные: ось вращения и вращаемая кривая. В программном коде для получения корректного результата рекомендуется производить изменения значений только этих параметров.
Рассчитывается основание перпен-
—
—
дикуляра P(t) из точки R(t) на пря-
— мую A B .
R(f)-P(f)
1Г |R(f)-P(f)|
Wi, - B"A
^W" |B-A| ty^^l1!»


^М^ c2s^ := ^'^^
l^W;
^3hl^)
e2s^ :=
Локальный базис
(h1(t),h2(t),h3(t) ) для каждой отдельной точки R(t) .
Базисные векторы (ех ,е2 ,е3) системы координат (OXYZ) .
Базис ( e 1s(t),e 2s(t), e 3s(t)) в системе координат (hj (t), h2 (t), h3 (t) ).
e3s^ := ^ Лг^ ^W
'cos(w) ^
s(w,f) := |R(f) - P(f)| ■ sin(w)
к 0 j

S , Line , R
Вращаемая точка R(t) описывает e e окружность вокруг прямой A B .
Ее представление в системе коорди-—► —► —►
нат (h1(t),h2(t),h3(t)) .
Та же окружность, представленная в системе координат (OXYZ) .
e e
Прямая A B .
Результат построения поверхности вращения кривой R(t) вокруг прямой e e
A B , представлена в системе координат (OXYZ) .
Вращение одной параметрической кривой вокруг другой
Вращение производится в плоскости перпендикуляра, опущенного из точек вращаемой кривой на другую.
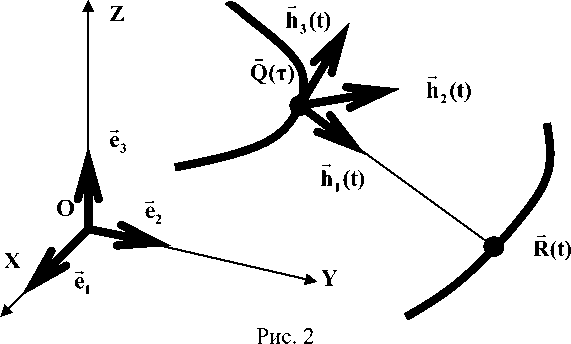
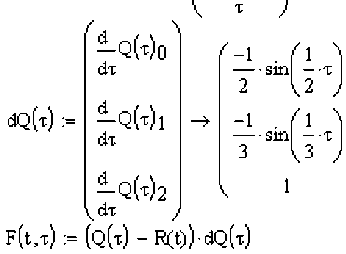
Пусть R(t) является вращаемой кривой (рис. 2). Рассмотрим кривую Q(t) . Из точек кривой R(t) опустим перпендикуляр на кривую Q(t) .
т параметрами t и
Соответствие между
происходит из уравнения
(R(t)-Q(T))□dQ(T) = о. Следует отметить, что далеко не всегда можно получить аналитиче-dT скую зависимость T(t). Решение данного уравнения в численном виде будем искать сле дующим образом. Скалярное уравнение F(t, т) = (R(t) - Q(t))[]dQ(T) продифференцируем по dT
,. д . д _. , dT _ _ параметру t, предполагая, что существует зависимость T(t), —F(t, т)+—F(t, т) = 0. От- t St dt
V dT ^F(t’T)
сюда имеем исходные данные для постановки задачи Коши , начальные ус- dt ^F(t, T)
ловия t0 и T(t0) = T0 получаем из решения уравнения (R(t)-Q(T)) DdQ^ = 0 любым известит ным способом.
Таким образом, будем считать, что нами найдена функциональная зависимость параметра т от параметра t . В точке кривой Q(t) , соответствующей точке кривой R(t) , сфор-
—— —— —— —► мируем локальный базис (h1(t),h2(t),h3(t)), где h3(t) =
R(t)-Q(t(T))
, h3(t) =
I R(t)-Q(t(T))|
-dQ(T(t)) dT ______ -dQ(T(t)) dT
,
h2(t) = h3(t) xhj(t) . Далее можно поступить так, как описано в 1: сформируем базис
^—
(—1 ,—2 ,e3) в системе координат (OXYZ) , переведем его в систему координат базиса
—— —— ——
, ——
——
—
(h x (t),h 2 (t),h 3 (t) ), он будет выглядеть как (e,s(t),e2s(t),e3s(t)) , формулы приведены в 1.2.
Вращение точки R(t) вокруг точки Q(t) в системе координат базиса (h1(t),h2(t),h3(t) ) в плоскости векторов h3(t) , h2(t) будет описываться аналогичным способом, как в 1:
cos(w)
s(w, t) = |R(t) - Q(T(t))|[ sin(w) . А непосредственно моделируемая поверхность будет выгля- 0
els(t) s(w,t)
деть так: S(w, t) = e2 s (t) • s(w, t) + Q(T(t)) . Ниже приведен листинг программы, иллюстри-
_ e3 s (t) s(w,t)
рующей приведенный в этом параграфе способ вращения параметрической кривой вокруг
другой.
Входные данные: Q(t) и R(t) . В программном коде для получения корректного результата рекомендуется производить изменения значений только этих параметров.
Расчет вектора
dQ(T) dT
.

-F(x,y)
Формирование уравнения
F(t, T) = (R(t)-Q(T))□dQ(T). dT
Нахождение начальных условий для задачи Коши.
Given -^(t) = f(t,T(t)) т := Odesolve|t,ti 1
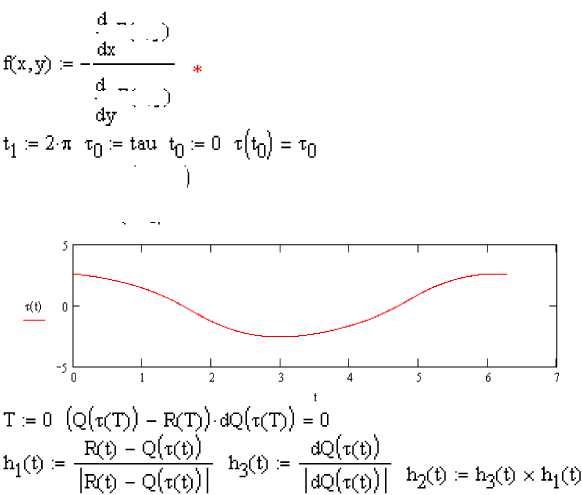
—F(x,y)
Задание дифференциального уравнения 1 порядка для решения задачи Коши.
Решение задачи Коши.
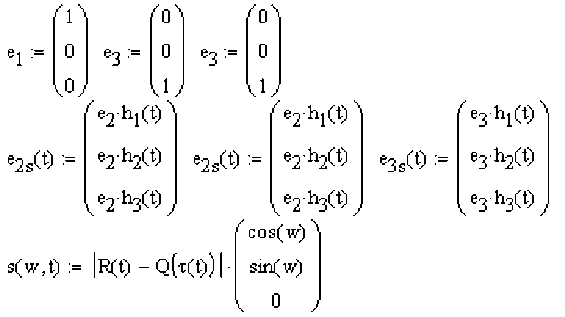
График зависимости параметра t от параметра t .
Тестовая проверка.
Локальный базис
(h1(t),h2(t),h3(t) ) для каждой отдельной точки R(t) .
Базисные векторы (е1, е2, е3)
системы координат (OXYZ) .
Базис (els(t),e2s(t),e3s(t)) в системе координат (h2 (t), h2 (t), h3 (t)).
Вращаемая точка R(t) описывает окружность вокруг Q(T(t)) в плоскости векторов ht(t) , h2(t) . Ее
представление в системе координат
''els(t)-s(w,t)''
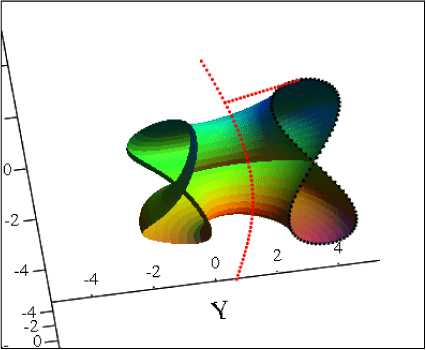
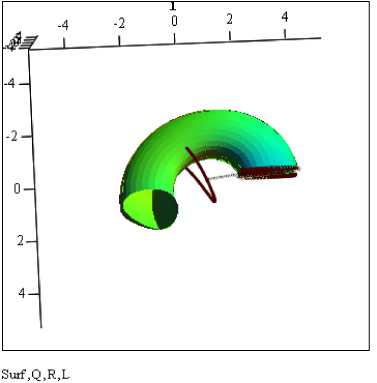
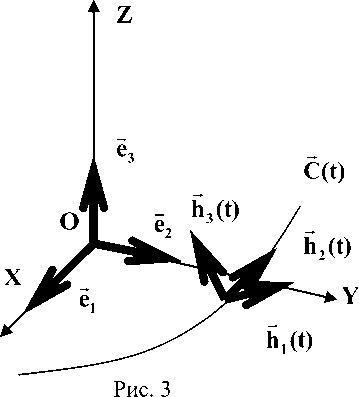
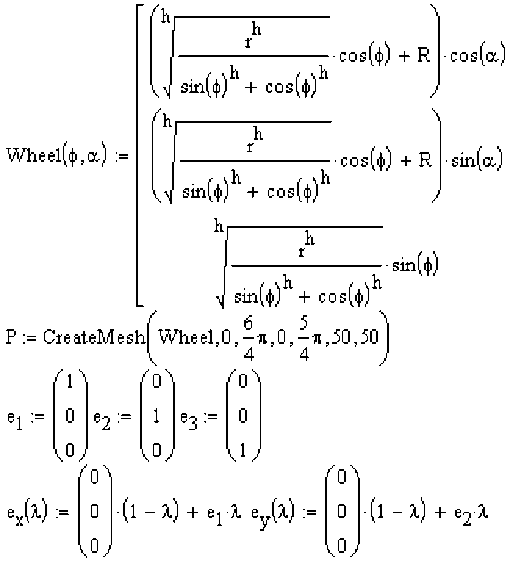
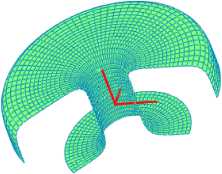
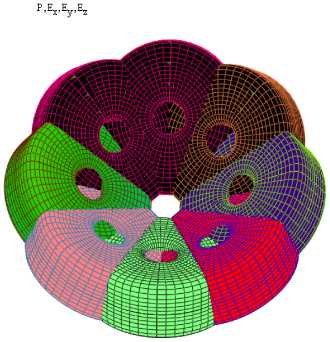
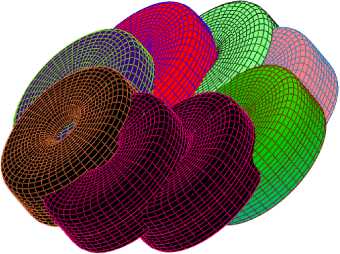
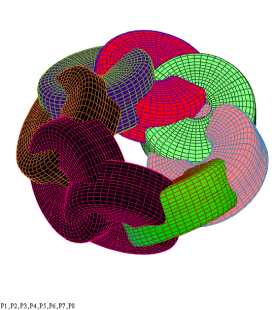
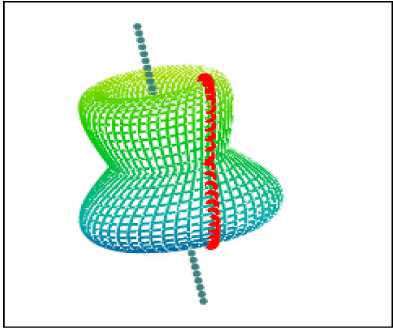
S(w,t) := e2s(9's(w,t) +Q( ^e3s(t)s(w,t)> L(h) := h-Qto) + (1 - h)R(T) Surf := CreateMesh(S ,0,1 я ,0,2 л ,50,50) Q,R,L,Surf Результаты работы программы, разные виды одной и той же поверхности. —— —— —— (h1(t),h2(t),h3(t)). Та же окружность, представленная в системе координат (OXYZ) . Перпендикуляр, опущенный из точки R(0) на кривую Q(t) . Визуализация поверхности. Вращение параметрической поверхности вокруг прямой Рассмотрим параметрическую поверхность x случае это поверхность вращения: W ф,а =5у z в некотором ф,а Ф,а . Пусть Ф,а локальном базисе, в данном центр координат локального x базиса движется по некоторой траектории C t = y z t t (рис. 3). t Локальный базис ht, ht и ht в приведенном ниже примере передвигается по траектории Ct следующим образом. Параметрическая кривая Ct в нашем случае явля-cos t ется окружностью C t = 6 sin t . Единичный вектор ht направлен по касательной к 0 кривой Ct : h t Ct d dt Ct d dt . Единичный вектор ht совпадает по направлению с векто- ром -C t : h3 t 0 0 -C t 10 0 0 -C t 10 . Из условий постановки задачи очевидно, что векторы ht и ht лее поступаем ортогональны. Соответственно, вектор ht будет h t = h t × h t . Да-способом, описанным в § 1. Произведем преобразование базиса (е, ,е2 ,е3) системы координат OXYZ в базис (eis(t),e 2S(t),e 3,(t)) . Так он будет выглядеть из системы координат базиса (h (t),h2(t),h3 (t)). Передвигаемая поверхность W ф,а в зависимости от e1s W значения параметра t выглядит так: S ф,а,t = e2s W e3s W листинг программы иллюстрирует данные вычисления. г := 2 R := 3 h := 6 Ф,а ф,а + C t . Приведенный ниже Ф,а Задание параметров передвигаемой поверхности W ф,а (в нашем случае это поверхность Wheel ф,а ). Визуализация. Задание и визуализация единичных векторов системы координат OXYZ . E^ := CreateSpacel ex,0,2,20|Ey := CreateSpacei e^,0,2,201 E^ := CreateSpacel 6^,0,2,201 4s^:= elh2^ ei-h3(t) —Circleft; —Citclert) —Circleft; —Circlet t) —Circlet t) —Circlet tj hi(t) := h2(- ^eis(t) -Wheelie,) Задание траектории перемещения Ct (Center t ). Задание локального базиса. з(ф,а,д) := e2 s(t) • Whe е1(ф, a,) + Circle(t) e3s(t) Wheeled) Визуализация поверхности t= 0ππ42 31 (ф,а) := 3(ф,а,0) 35(ф,а) := з(ф,а,л) Pl РЗ Р5 Р7 Wheel φ,α 3π = CreateMesh(Sl,0,2n,0,2n,50,50) = CreateMesh(S3,0,2n,0,2n,50,50) = CreateMesh(35,0,2n,0,2n,50,50) = Сгеа1еМезН(37,0,2л,0,2л,50,50) Перерасчет локального базиса. Передвигаемая поверхность Wheel φ, α по траектории Center t в момент времени t . от значений параметра πππ π5 3 7 37(ф,а) := 3 34(ф,ос) := з[ ф,а.,-л V 4 38(ф,а) :=з[ф,а,-л \ 4 Р2 := CreateMesh(S2,0,2n,0,2n,50,30) Р4 := CreateMesh(S4,0,2л ,0,2л ,50,50) Рб := Сгеа1еМевЬ(Зб,0,2л,0,2л,50,50) Р8 := Сгеа1еМесН(38,0,2л,0,2л,50,50) Поверхность Wheel ф,а в локальном базисе. Р1,Р2,РЗ,Р4,Р5,Р6,Р7,Р8 Результат передвижения поверхности Wheel ф,а при различных значениях параметра t . N := 50 л • • А \ Ji FRAME Animation^,а.) := 51 ф,а,,———2л Cinema := Cre ateM е sh(Animation, 0,2л,0,2л,50,50) Среда MathCAD предполагает создание анимированных изображений. Если в системе координат OXYZ (см. рис. 3) зафиксировать локальный базис (h (t), h (t), h (t)) , мы получим результат, показанный ниже. Еще раз напомним о том, что должно выполняться требование ортогональности локального базиса. Векторы (h (t), h (t), h (t)) должны быть единичными. Параметрическая кривая Ct и ориентация в системе координат OXYZ локального базиса (h (t), h (t), h (t)) может быть произвольной. Данный результат достигается в листингепрограммы следующим образом: dCircle(t) := -Circle(t)n dt и -CircleCt). dt 1 Р1,Р2,РЗ,Р4,Р5,Рб,Р7,Р8 -Circle(t)- Анимированное изображение можно посмотреть здесь Если в системе координат локального базиса (h (t), h (t), h (t)) пожелаем произвести вращение исходной поверхности вокруг оси ординат, то нам необходимо уравнение исход- ной поверхности умножить на матрицу вращений вокруг оси Y : Wh φ,α,ω = cos ω 0 sin ω 0 1 0 -sin ω 0 cos ω Wheel φ, α . Листинг программы можно скачать здесь. Результат работы программы, в которой вращение вокруг оси ординат локального базиса синхронизировано следующим образом: ω t = , показан ниже. Сам локальный базис (h (t), h (t), h (t)) не вращается, вращается в нем только исходная поверхность Wheel φ, α . Анимированное изображение можно посмотретьздесь Также можно совершать одновременное вращение вокруг оси ординат и вокруг оси абсцисс локального базиса (h (t), h (t), h (t)) : 1 0 0 cos ω 0 sin ω Wh φ,α,ω,ψ = 0 cos ψ sin ψ 0 1 0 Wheel φ, α 0 -sin ψ cos ψ -sin ω 0 cos ω Заключение В данной статье мы продемонстрировали решение задач, связанных с моделированием поверхностей, в которых присутствуют элементы вращения. Также были решены некоторые кинематические задачи: задача движения поверхности по траектории с изменяемой ориентацией локального базиса, задача движения поверхности по траектории с вращением в локальном базисе. Решение было произведено в системе компьютерной математики MathCAD 11. Также были приведены программные коды всех примеров, изложенных в данной статье.