Моделирование позиционных характеристик индуктивных датчиков линейных перемещений модифицированными функциями Гаусса с разностным аргументом

Автор: Тиньгаев Владимир Сергеевич, Матюнин Сергей Александрович, Медников Валерий Александрович, Мадриченко Вениамин Геннадьевич
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Авиационно-космическое машиностроение
Статья в выпуске: 1-2 т.14, 2012 года.
Бесплатный доступ
В статье рассматривается аппроксимация позиционной характеристики первичных преобразователей с помощью модифицированной функции Гаусса. Приведены сравнительные результаты оптимизации коэффициентов четырёх разновидностей аппроксимирующей функции для трёх критериев оптимизации.
Математическая модель, преобразователи линейных перемещений, индуктивный датчик, позиционная характеристика
Короткий адрес: https://sciup.org/148200633
IDR: 148200633 | УДК: 681.586.78
Modeling the positional characteristics of inductive linear displacement sensors by modified Gaussian functions with different argument
In article approximation of positional characteristic of primary sensors by means of the modified Gaussian functions is considered. Comparative results of factors optimization of four versions of approximating function for three criteria of optimization are given.
Текст научной статьи Моделирование позиционных характеристик индуктивных датчиков линейных перемещений модифицированными функциями Гаусса с разностным аргументом
Преобразователи линейных перемещений (ПЛП) являются одним из важных измерительных элементов высокоточных систем управления и контроля, особенно в авиационной и ракетнокосмической технике. Разработкой и выпуском точных и компактных преобразователей перемещения занимаются достаточно многие фирмы, но только очень немногие из них могут выпускать преобразователи для жестких условий эксплуатации (Heiden-hain, Германия; Sony и Mitutoyo, Япония; Harley Precision Instrument, США и некоторые др.). В связи с работами по модернизации и созданию новых типов ракетных, авиационных и наземных боевых комплексов вызывает необходимость в расширении исследований по созданию первичных преобразователей с высокими стабильными метрологическими показателями, в том числе устойчивыми к особо жестким внешним дестабилизирующим факторам: виброударным воздействиям, глубоким перепадам температуры вплоть до криогенных температур.
Для отработки конструкции преобразователей перемещений их оптимизации необходима математическая модель, которая могла бы аппроксимировать экспериментальные данные по возможности более точно с использованием небольшого количества коэффициентов, характеризующих модель. Анализ характера
экспериментально полученных позиционных характеристик U j показал, что следующие функции имеют вид, характерный для позиционных характеристик индуктивных преобразователей перемещения (ИПП):
Y 1 ( x ) = a + b ■ ( x 0 - x ) ■ e c (x 0 x
Y 2 ( x ) = a + b ■ ( x 0 - x ) ■ e c x 0 x
Y 3 ( x ) = a + b • ( x 0 — x ) ■ e ' 0 '
Y 4 ( x ) = a + b • sin g ( x 0 — x ) ■ | x 0 — x| ”
e- c ■ x о — x lZ
В качестве критериев оптимизации при поиске неизвестных коэффициентов a, b, c, x0, n, z функций (1)-(4) были выбраны минимальные значения среднеквадратического отклонения Wско, среднемодульного отклонения Wсмо и наибольшего отклонения Wммо во всем диапазоне перемещений Х подвижного (элемента) ИПП:
W 1 ( a, b, c, x 0, z, n ) =
Nn — 1
Nn — 1
^ (U j — Y 1( a , X j , b, c, x 0 , z , n ))
j = 0
1 Nn — 1
W 2 ( a , b, c, x 0 , z , n ) = ——- У ( IU j — Y 1( a , x j ,b , c , x 0, z , n )l) Nn — 1 t ~ 5
W 3 ( a , b, c , x 0, z , n ) = Max ( U y — Y ( x} )) (7)
где Nn – количество экспериментальных точек.
Коэффициенты a, b, c, x 0 , z, n можно найти минимизируя функцию погрешности W, используя компьютерный математический пакет Mathcad компании MathSoft [2] с помощью функции:
Minimize ( W,a,b,c,x , z , n)
В таблице 1 даны результаты расчетов оптимальных коэффициентов a, b, c, x 0 , z, n обеспечивающих минимальные погрешности аппроксимации функций Y1(x), Y2(x), Y3(x), Y4(x) для каждого критерия Wско, Wсмо, Wммо. На рис. 1 графически представлена аппроксимирующая функция Y1(x) оптимизации по среднеквадратическому отклонению Wско и исходный набор данных U j (x j ).
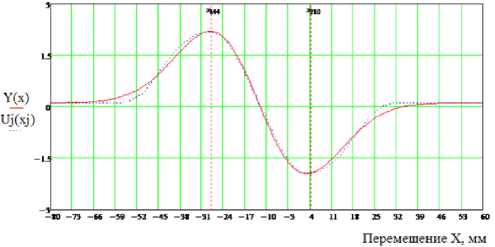
Рис. 1. Позиционные характеристики экспериментальной U j и аппроксимирующей функции Y1(x)
Относительные погрешности среднеквадратическое отклонения γ1 ско , средне модульное отклонение γ1 смо и наибольшего отклонения γ1 ммо для всего диапазона аппроксимации для функции Y1(х) (формула 1), оптимизированных на минимум среднеквадратичного отклонения определяются как:
γ1ссккоо = 00 ⋅W1ссккоо(a,b,c, x0) = 2,01%(9)
U -U maxmin
γ1сскмоо = 100 ⋅W1сскмоо(a,b,c,x0)=1,32%
— U maxmin
γ1ско = ⋅W1ско (a,b,c,x ) = 5,2% ммо ммо , , , 0
max - min
Относительные погрешности среднеквадратическое отклонения γ1 ско , средне модульное отклонение γ1 смо и наибольшего отклонения γ1 ммо для всего диапазона аппроксимации для функции Y1(х) (формула 1), оптимизированных на минимум среднемодульного отклонения определяются как:
γ1сскмоо = 100 ⋅W1сскмоо(a,b,c, x0) = 2,1% maxmin
γ1ссммоо = ⋅W1ссммоо(a,b,c,x0)=1,24% maxmin
γ1смо = ⋅W1смо(a,b,c,x ) = 6,14% ммо ммо0
maxmin
Относительные погрешности среднеквадратическое отклонения γ1 ско , средне модульное отклонение γ1 смо и наибольшего отклонения γ1 ммо для всего диапазона аппроксимации для функции Y1(х) (формула 1), оптимизированных на минимум максимального отклонения определяются как:
γ1ммо = 100 ⋅W1ммо(a, b, c, x ) = 2,16% ско ско0
max - min
γ1смммоо = 100 ⋅W1смммоо(a,b,c,x0)=1,38% maxmin
γ1ммо = 100 ⋅W1ммо(a, b, c, x ) = 5,01% ммо ммо , , , 0
maxmin
Аналогично была проведена оптимизация функций Y2(x), Y3(x), Y4(x), результаты помещены в сводную таблицу 1. Распределение погрешности ε j аппроксимации функцией Y1(х) в каждой j-той экспериментальной точке вычислялось по формуле:
U -Y1(x ,a,b,c,x ) ε = j j, , , , 0 ⋅100% j U -U max min
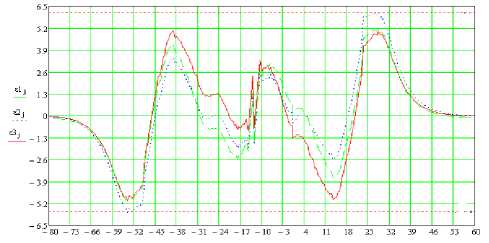
и представлена графически на рис. 2 ε1 j – при минимизации среднеквадратичного отклонения; ε2 j – при минимизации среднемодульного отклонения; ε3 j – при минимизации максимального отклонения.
Перемещение X, мм
Рис. 2. Относительная погрешность аппроксимирующей функции Y1(x)
Распределение погрешности ε j аппроксимации функцией Y2(х) в каждой j-той экспериментальной точке вычислялось по формуле:
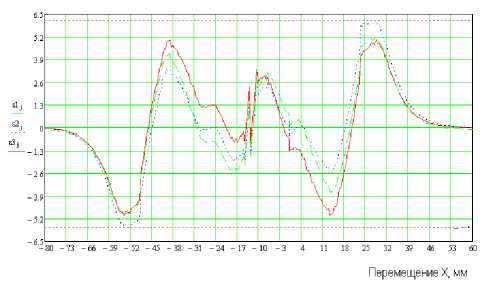
Рис. 3. Обобщенная погрешность аппроксимирующей функции Y2(x)
ε j
U: - Y 2( x, , a , b , c , x )
v j’ ’ ’ ’ 0' . 100%
U -U ■ max min
и представлена графически на рис. 3 ε1 j – при минимизации среднеквадратичного отклонения; ε2 j – при минимизации среднемодульного отклонения; ε3 j – при минимизации максимального отклонения.
На рис. 2, 3 показаны относительные погрешности аппроксимирующих функций Y1(x), Y2(x), из которых видно, что по краям экспериментальной характеристики погрешность аппроксимации максимальная, а в центральной области погрешность аппроксимации минимальная.
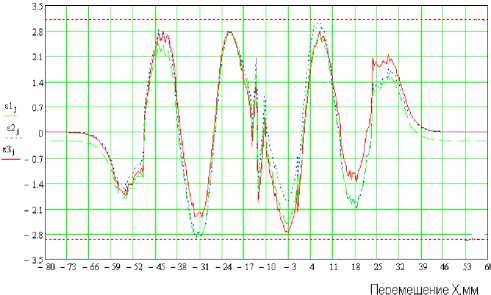
Рис. 4. Обобщенная погрешность аппроксимирующей функции Y3(x)
Распределение погрешности ε j аппроксимации функцией Y3(х) в каждой j-той экспериментальной точке вычислялось по формуле:
U, - Y 3( x , a , b, c, x n)
£ = ^----- v j , , , , 0) _ W0% (20)
j max min и представлена графически на рис. 4 ε1j – при минимизации среднеквадратичного отклонения; ε2j – при минимизации среднемодульного отклонения; ε3j – при минимизации максимального отклонения.
Распределение погрешности ε j аппроксимации функцией Y4(х) в каждой j-той экспериментальной точке вычислялось по формуле:
U; - Y 4( x,, a, b, c, x )
g = ^----- v j , , , , 0) _ W0% (21)
j U -U max min и представлена графически на рис. 5 ε1j – при минимизации среднеквадратичного отклонения; ε2j – при минимизации среднемодульного отклонения; ε3j – при минимизации максимального отклонения.
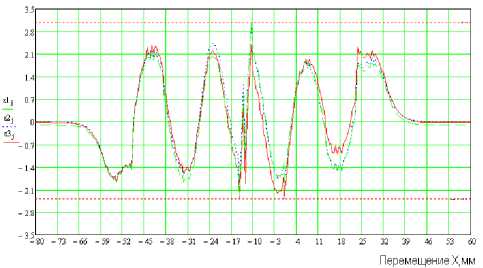
Рис. 5. Обобщенная погрешность аппроксимирующей функции Y4(x)
На рис. 4, 5 показаны относительные погрешности аппроксимирующих функций Y3(x), Y4(x), на которых видно, что по краям экспериментальной характеристики погрешность аппроксимации и в центральной области погрешность аппроксимации минимальные.
Список литературы Моделирование позиционных характеристик индуктивных датчиков линейных перемещений модифицированными функциями Гаусса с разностным аргументом
- Тиньгаев, В.С. Аппроксимация характеристик индуктивных датчиков линейных перемещений с помощью модифицированной функции Гаусса с разностным аргументом первого порядка/В.С. Тиньгаев, С.А. Матюнин, В.А. Медников//Вестник Самарского государственного аэрокосмического университета. 2011. №7 (31). С. 77-81.
- Кирьянов, Д.В. Самоучитель Mathcad 11. -СПб.: БХВ-Петербург, 2003. 560 с.
- Карпов, В.И. Проектирование датчиков для измерения механических величин. -М.: Машиностроение, 1979. 207 с.
- Аш, Ж. Датчики измерительных систем. Кн. 1. -М.: Мир, 1992. 480 с.
- Фрайден, Дж. Современные датчики. Справочник. -М.: Техносфера, 2005. 592 с.
- Baumer (Швейцария). Индуктивные датчики с пропорциональном (аналоговым) выходом http://www.promsystex.ru/catalog
- Baumer (Швейцария). Магнитные датчики, датчики линейных перемещений http://www. promsystex.ru/catalog
