Моделирование процесса шумообразования фрезерных деревообрабатывающих станков с опорами двойного действия с газовой смазкой

Автор: Ахвердиев Камил Самедович
Журнал: Advanced Engineering Research (Rostov-on-Don) @vestnik-donstu
Рубрика: Технические науки
Статья в выпуске: 2-1 (63) т.12, 2012 года.
Бесплатный доступ
Приводится постановка задачи моделирования процесса шумообразования шпиндельных бабок сверлильных деревообрабатывающих станков с опорами двойного действия с газовой смазкой. Даётся расчёт нагрузочных характеристик упорного газодинамического подшипника двойного действия в случае, когда элементы (ползуны), расположенные по обе стороны от направляющей, совершают колебания в направлении, перпендикулярном плоскости направляющей.
Моделирование, процесс шумообразования, деревообрабатывающие станки, подшипники двойного действия, газовая смазка
Короткий адрес: https://sciup.org/14249782
IDR: 14249782 | УДК: 51:621.891+06
Modeling of noise emission of milling woodworkers with double acting gas-lubricated bearings
The problem on simulating noise emission of the spindle heads of the drilling woodworkers with double acting gas-lubricated bearings is formulated. The load characteristics of the double acting gas-lubricated thrust bearing are calculated where the units (slides) on both sides of the slide rail oscillate in the direction perpendicular to the guide surface.
Текст научной статьи Моделирование процесса шумообразования фрезерных деревообрабатывающих станков с опорами двойного действия с газовой смазкой
Введение. Деревообрабатывающие станки интенсивно эксплуатируются в различных отраслях промышленности, включая предприятия транспортного машиностроения. Корпусные и базовые детали являются основными источниками акустического излучения в интервале частот 31,5-500 Гц. По данным работы [1], у токарно-винторезных станков доля звуковой мощности шпиндельных бабок в общем звуковом поле станка составляет 48-52%, а станины – 33-35%. Следует иметь в виду, что основным источником возбуждения колебаний станины является именно шпиндельная бабка. Аналогичная картина, согласно исследованиям [2-4], наблюдается у токарноревольверного станка 1325ФЗО: для шпиндельной бабки составляет 48-50%, а станины – 42-45%; у токарно-револьверных станков 1Д325 и 1Е316П вклад источников более равномерный: шпиндельная бабка 32-35%, коробка подач 30-32%.
Корпусные детали принадлежат к классу энергетически замкнутых конструкций с небольшим коэффициентом потерь. Задача расчёта излучения звука такими конструкциями сводится к определению амплитуд колебательных скоростей соответствующих стенок, которые находятся из уравнений энергетического баланса. Ввод вибромощности в корпуса таких узлов, как шпиндельная бабка, редуктор, коробка подач, осуществляется только через подшипниковые опоры. Тогда система уравнений энергетического баланса может быть записана в виде [5] K 1 K 1 k 2
У(5, S, + a ,l, 2 = У«, У ZV, 2 + 2п RhTN , Z =-пп, fM. , (1)
i i H i* i il^ i i
где 5 I - коэффициенты поглощения энергии в стенках корпуса, м-1; a i-J; J—i - коэффициенты передачи между двумя соседними стенками корпуса; l i–j – длина линии контакта между двумя пластинами, м; R Hi – радиус наружного кольца подшипника, м; К 1 – количество стенок корпуса; К 2 – количество подшипников в соответствующей стенке; V i – виброскорости стенок, м/с; z i – эффективный коэффициент потерь колебательной энергии в стенках корпуса; f i – собственные частоты колебаний, Гц; M i – масса стенки, кг.
Коэффициенты затухания для чугунного корпуса определяются по формуле
5 i = 0,03п
Г f
0,5
к
hj
Коэффициент прохождения энергии изгибной волны из пластины в пластину определяется по формуле
a
i - j
= 2
2,5
( h; )
1 +
2,5
(tJ
- 2
V
, n
где v — функция, учитывающая соотношение толщин пластин.
Вибромощность энергетического потока, вводимого через опору качения в корпус в соответствующей полосе частот, вычисляется по зависимости
N i = x < PV > . (4)
Здесь P и V – сила и скорость деформации в местах контакта шариков (роликов) с дорожкой качения наружного кольца (угловые скобки обозначают усреднение по времени); х - коэффициент мощности в соответствующей полосе частот, зависящий от формы импульса силы.
На основе рассчитанных виброскоростей стенок корпуса определяются уровни звукового давления с использованием известного интеграла Релея-Гюйгенса. Расчёт виброскоростей стенок корпуса для шпиндельных бабок токарно-револьверных и токарно-винторезных станков принципиальных отличий не имеет, хотя их компоновки с позиций ввода в корпус вибромощности имеют существенные различия. У высокоскоростных токарно-револьверных станков мод. 1Е316П, 1Д325, 1325ФЗО шпиндельные бабки представляют собой прямоугольный параллелепипед без промежуточных стенок, без промежуточных валов и приводных зубчатых колёс, поэтому система (1) состоит из шести уравнений. Привод шпинделя осуществляется клиноременной передачей. Вибромощность в корпус переносится через переднюю и заднюю опоры шпинделя. Вводимая в корпус вибромощность определяется через деформации опор с учётом нагрузок только от процесса резания.
Шпиндельные бабки токарно-винторезных станков также представляют собой конструкцию, близкую по форме к прямоугольному параллелепипеду, но с несколькими промежуточными стенками, несколькими подшипниками в каждой стенке и большим количеством зубчатых передач. Именно этими обстоятельствами определяется подход к расчёту вибромощности, передаваемой через шпиндельные опоры. Для опор шпинделя сила и скорость деформации в подшипниках определяется с учётом нагрузок от процесса резания и зубчатых передач, а для промежуточных опор учитываются реакции от действия сил в зубчатых зацеплениях.
Из системы уравнений энергетического баланса определяются виброскорости на собственных формах колебаний стенок и уровни шума. Как видно из полученных зависимостей, снижение вибраций может быть достигнуто уменьшением вводимой в корпус вибромощности от подшипниковых узлов. Поэтому не только теоретический, но и практический интерес представляет замена подшипников качения в опорах шпинделей на подшипники скольжения различных конструкций.
Действительно, подшипники скольжения обладают не только повышенными демпфирующими характеристиками, но и имеют значительную площадь опорной поверхности. Эти их особенности позволяют предположить, что вводимая в корпус шпиндельных бабок вибрационная мощность существенно понизится. Однако следует отметить, что замена подшипников качения на подшипники скольжения возможна только при условии сохранения нагрузочных и точностных характеристик. Ниже приводится расчёт нагрузочных характеристик упорного газодинамического подшипника, обладающего по несущей способности свойством подшипника двойного действия .
Термин «подшипник двойного действия» использован в работе [6]. В ней вводится следующее понятие: если подшипники, в которых несущая способность развивается только за счёт увеличения давления с одной стороны нагруженного элемента, определить как подшипники простого действия , то можно использовать термин «подшипники двойного действия» в тех случаях, когда несущая способность является результатом как возрастания давления с одной стороны, так и уменьшения давления с другой стороны нагруженного элемента. Приведённый в работе [6] подшипник двойного действия состоит из направляющей, которая движется относительно неподвижного элемента так, что движение происходит в направлении сужения зазора. При этом аналогичный неподвижный элемент (ползун) расположен по другую сторону поверхности движения. В результате движение происходит в направлении расширения зазора относительно этого элемен- 12
та, т. е. подшипник становится подшипником двойного действия. Несущая способность подшипника двойного действия есть сумма несущей способности, получаемой в основной части подшипника простого действия, и дополнительной несущей способности, получаемой в части подшипника с расширяющимся зазором. Потенциальные возможности подшипника двойного действия в работе [6] приведены для подшипника бесконечной длины, для которой уравнение Рейнольдса легко решается. Для подшипника конечной длины анализ работы подшипника двойного действия приведён в работе [7].
Расчет упорного газодинамического подшипника двойного действия. Основная цель данной работы – привести потенциальные возможности подшипника двойного действия в случае, когда элементы (ползуны), расположенные по обе стороны от направляющей, совершают колебания в направлении, перпендикулярном плоскости направляющей (рисунок). Кроме того, в качестве исходных уравнений возьмём уравнения движения вязкого газа с учётом сил инерций [8, 9]:
d2 u dp d u f Su du)
ц —2- = — + p— + p u — + u—I, d y 2 dx d t ( d x dy )
Ip = 0, ^^( P u ) + ^( P u ) = 0, P = P RT . оy dt оx оy
Здесь ц - динамический коэффициент вязкости; u , u - компоненты вектора скорости; р - гидродинамическое давление; р - плотность; R - газовая постоянная; Т - температура.
Уравнения подвижных элементов (совершающих колебания) будем искать в виде:
y = h ( x , t ) = h m + xtga + Ф ( t ); y = H ( x , t ) = h M - xtga - Ф ( t ).
Рассмотрим нестационарное движение газовой смазки между двумя пластинами (между ползуном и направляющей). Одна из пластин (направляющая), уравнение которой y = 0, считается бесконечной и движется с постоянной скоростью u 0 в отрицательном направлении оси Ох (см. рисунок).
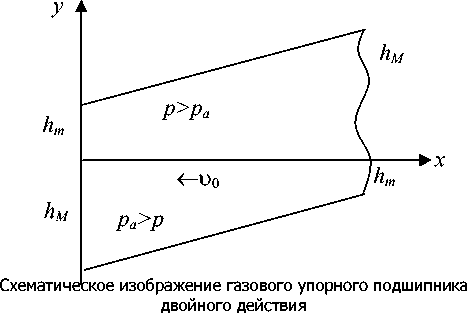
Другая пластина (ползун), уравнение которой y = h + xtg a + Ф ( t ) = h ( x , t ) , считается полу-бесконечной ( х > 0 ), образует с первой угол a и движется (колеблется со скоростью Ф( t ) ) в направлении, перпендикулярном бесконечной пластине.
Система уравнений (5) сначала решается при следующих начальных и граничных условиях:
u = -u0, u = 0 при y = 0; u = 0; u = Ф '( t ) при y = h ( x, t ). (6)
Так как поверхность ползуна совершает колебания в направлении, перпендикулярном оси Ох, то в сечении х = 0 возникают флуктуации граничного условия для гидродинамического давления. Следовательно, в качестве дополнительного граничного условия для газодинамического давления будем иметь:
Р = P a h m / ( h m + Ф ( t ) ) , (7)
где Ф( t ) характеризует заданную степень гармонического колебания.
Введём функцию у( x , У , t ), аналогичную функции тока:
ду ри = —; ри = ду
ду д p --у — .
д x д t
Точное автомодельное решение задачи (5)-(6) будем искать в виде [9]: у( x , у , t ) = у(С); p = p a h m ; С = .
h ( x , t ) h ( x , t )
Подставляя (9) в (5) и (6), будем иметь:
d 3y c2 у'RT v—y = -—tga; u =----;
d С RT c
у'-С tg a- RT и = ------+ С Ф'(t);
c
у'(С) =-и0 при c = 0; у'(С) = 0 при c = 1, c 2 = p 2 h2m.
Решение задачи (10)-(11) легко находится непосредственным интегрированием. В результате будем иметь:
c2 c2 c2 С цу (c) = -—tg a-—+—tg a•- + цuоc-цuо;
RT 2 RT 2
p =
p h pa m .
h 0 + xtg a + Ф ( t )
C учётом (12) для несущей способности подшипника, вносимой сужающимся зазором, получаем следующее выражение нагрузки, приходящейся на единицу длины подшипника:
r ph ph ph
[ -----p a m--- p a m dx = p am
0 L hm + xtga + Ф(t) hm + Ф(t) J tga k-1 - Фй
In — kh
1 + ФЙ 1 + Фй hm hm
где k = h m I h m ; l - единица длины.
В случае, когда поверхность подшипника совершает гармонические колебания в направлении, перпендикулярном плоскости направляющей, т.е. когда Ф( t ) = A sino t , будем иметь:
P =
p a h m
h m + xtg a + A sin ю t
p a h m
; w c =---- tg a
In—
1 +
k
-
k -1
-
A sin ю t h m
A sin ю t , A sin ю t
-------- 1 +--------
.
h m
h m
В случае подшипника с расширяющимся зазором решение задачи (5)-(7) также ищется в виде (9), полагая здесь С= y/H(x,t).
Для подшипника простого действия p =
р h pa m
h m + xtg a + Ф ( t )
и несущая способность осредня-
ется формулой (14).
Для подшипника двойного действия нагрузка, вносимая расширяющимся зазором единичной длины, определяется выражением:
l wP =f
0 _
pahM pahM hM - Ф (t) hM - xtga- Ф (t)
dx = p a h m. tg a
k - 1
-
Ф ( t ) hm
k - Ф^? 1 hm
+ In
1 k^^M hm
.
В случае, когда Ф(t) = Asinot, wp
p = Т" hM
pal " k
k - 1 - ? < t > hm
р h pa m
;
- xtg a- A sin ю t
k - 1
-
A sin ю t hm
, A sin ю t k-- hm
+ In
, A sin ю t k-- hm
.
В результате определяется w – несущая способность подшипника как сумма несущей способности w c , полученной в основной части подшипника простого действия, и дополнительной несущей способности wp , получаемой в части подшипника с расширяющимся зазором:
w = W c + W p , (17)
где w c и wp соответственно определяются выражениями (14) и (15).
Деля уравнение (14) на уравнение (16) при Ф( t ) = 0 , получаем отношение составляющих нагрузки от двух частей подшипника:
w п = — wp
к - 1 - Ink к Ink - к + 1
Из (18) следует, что максимальное значение п приближается к 1 при к ^1 . Это означает, что подшипник двойного действия эффективен при низких нагрузках.
Из полученных аналитических выражений (14) и (16) следует:
-
1. При Ф( t ) = 0, к ^ 1, w c = 0, wp = 0, w = 0. Следовательно, несущая способность подшипника равна нулю.
-
2. При Ф( t ) ф 0, к ^ 1, w c ф 0, wp ф 0, w ф 0 подшипник обладает несущей способностью, обусловленной колеблющимися поверхностями элементов (ползунов) подшипника двойного действия.
-
3. Полученные здесь зависимости используются при решении системы уравнений энергетического баланса и позволяют на этапе проектирования выполнить реальный расчёт виброаку-стических характеристик шпиндельных бабок.
Заключение. Для снижения вибрационной мощности, вводимой в корпус шпиндельных бабок предлагается заменить подшипники качения в опорах шпинделей на подшипники скольжения. Даётся расчёт упорного газодинамического подшипника двойного действия.
Список литературы Моделирование процесса шумообразования фрезерных деревообрабатывающих станков с опорами двойного действия с газовой смазкой
- Козочкин М.П. Методы снижения шума металлорежущих станков и их узлов: метод. рекомендации/М.П. Козочкин. -М.: Машиностроение, 1986. -68 с.
- Чукарин А.Н. О расчёте корпусного шума шпиндельных бабок станков токарной группы/А.Н. Чукарин, А.А. Феденко//Надёжность и эффективность станочных и инструментальных систем. -Ростов н/Д, 1993. -С.74-78.
- Чукарин А.Н. Оптимизация конструкции корпусов шпиндельных узлов по критерию минимума акустической эмиссии/А.Н. Чукарин, А.А. Феденко, В.С. Каганов//Типовые механизмы и технологическая оснастка станков-автоматов, станки с ЧПУ и ГПС: тез. докл. -Киев, 1992. -С.22.
- Чукарин А.Н. Влияние вибраций встроенных подшипников качения на акустическую активность корпусных деталей металлорежущих станков/А.Н. Чукарин, Б.Г. Заверняев, Н.Н. Фуга//Оптимизация и интенсификация процессов отделочно-зачистной и упрочняющей обработки: межвуз. сб. науч. тр. -Ростов н/Д, 1987. -С.123-132.
- Чукарин А.Н. Теория и методы акустических расчётов и проектирования технологических машин для механической обработки/А.Н. Чукарин. -Ростов н/Д: Издательский центр ДГТУ, 2005. -152 с.
- Этисон Дж. Газовый упорный подшипник двойного действия -подшипники с высокой несущей способностью/Дж. Этисон//Труды Американского общества инженеров-механиков. -1977. -№1. -С.93-100.
- Ахвердиев К.С. Теория смазки и смазочного действия/К.С. Ахвердиев, С.А. Солоп, В.А. Константинов//Трение и смазка в машинах и механизмах. -2010. -№9. -С.3-6.
- Ахвердиев К.С. Газовый упорный подшипник с повышенной несущей способностью/К.С. Ахвердиев, В.А. Константинов, С.А. Солоп//Новые материалы и технологии в машиностроении: сб. науч. тр. по итогам междунар. науч.-техн. конф. -Брянск, 2009. -С.3-8.
- Ахвердиев К.С. Математическая модель гидродинамической смазки бесконечно широких опор, работающих в турбулентном режиме/К.С. Ахвердиев, А.Ю. Вовк, М.А. Мукутадзе и др.//Трение и смазка. -2007. -№6. -С.278-284.
