Моделирование процесса швартовки к борту судна-партнера на финальном этапе сближения судов "борт к борту" с использованием инновационного способа управления судном

Автор: Холичев Сергей Николаевич, Агарков Сергей Анатольевич
Журнал: Вестник Мурманского государственного технического университета @vestnik-mstu
Рубрика: Транспорт
Статья в выпуске: 1 т.18, 2015 года.
Бесплатный доступ
Проведено моделирование процесса швартовки к борту судна-партнера на финальном этапе сближения судов "борт к борту" с использованием инновационного способа. Представлены результаты модельного эксперимента, подтверждающие возможность использования данного способа на практике.
Способ швартовки, автоматизация швартовки, модельный эксперимент
Короткий адрес: https://sciup.org/14294779
IDR: 14294779 | УДК: 656.61.052.74
Modeling of mooring to the partner vessel at the final stage of "side to side" approach using innovative vessel's steering methods
Modeling of mooring to the partner vessel at the final stage of "side to side" approach using innovative vessel's steering methods has been carried out. The results of the model experiment confirming the possibility of using this method in practice have been presented.
Текст научной статьи Моделирование процесса швартовки к борту судна-партнера на финальном этапе сближения судов "борт к борту" с использованием инновационного способа управления судном
Аварии с судами разных типов и тоннажа происходят практически ежедневно. Для повышения безопасности проведения швартовных операций был разработан способ управления судном при швартовке к борту судна-партнера ( Холичев и др ., 2015).
Наиболее опасным при проведении любой швартовной операции является заключительный (финальный) этап – контакт судна с причалом, плавбазой или другим судном. Автоматизация процесса швартовки судов повышает безопасность любого вида швартовки, т.к. позволяет избежать ошибок человеческого элемента. В статье представлен инновационный способ швартовки к борту судна-партнера и результаты модельного эксперимента, проведенного авторами с целью доказать возможность применения данного способа на практике.
2. Способ швартовки к борту судна-партнера
На кафедре судовождения МГТУ разработан способ управления швартующимся судном при выполнении им швартовной операции к борту судна-партнера ( Юдин и др. , 2013a), когда в пределах контуров швартующегося судна и судна-партнера в их диаметральных плоскостях выбирают по две точки, одна из которых находится на носовой части А (швартующееся судно), А п (судно-партнер), другая – на кормовой части В (швартующееся судно), Вп (судно-партнер) относительно мидель-шпангоута соответствующего судна.
Координаты точек А , В , Ап , Вп в неподвижной координатной системе определяют непрерывно с высокой точностью (±1,0 м). Используя значения координат точек швартующегося судна А ( X 0 A , Y 0 A ), В ( X 0 B , Y 0 B ) и судна-партнера А п ( X 0 Aп , Y 0 Aп ), В п ( X 0 Вп , Y 0 Вп ) в неподвижной координатной системе, координаты тех же точек в подвижных системах координат, связанных c швартующимся судном А ( X A , Y A ), В ( X B , Y B ) и судном-партнером А п ( X Aп , Y Aп ), В п ( X Вп , Y Вп ), координаты центров тяжести (ЦТ) швартующегося судна в связанной с ним подвижной координатной системе G ( XG , YG ) и судна-партнера в связанной с ним подвижной координатной системе Gп ( X 0 Gп , Y 0 Gп ), а также значения расстояния между диаметральными плоскостями (ДП) швартующихся судов h 0 и расстояние между ЦТ швартующихся судов m рассчитывают ( Юдин и др. , 2013b):
-
– координаты центра тяжести швартующегося судна G ( X 0 G , Y 0 G ) в неподвижной координатной системе;
-
– координаты центра тяжести судна-партнера G п ( X 0 Gп , Y 0 Gп ) в неподвижной координатной системе;
-
– координаты точек А п ( ХА п , YAп ) и В п ( XB п , YB п ), расположенных на перпендикулярах к ДП судна-партнера восстановленных в точки Ап и Вп (рис. 1);
-
- координаты проекции ЦТ судна-партнера G П ( X 0 G П , Y 0 G П ) в неподвижной координатной системе на траекторию сближения в конечной стадии швартовки, проходящую параллельно ДП судна-партнера через точки A П и В П ;
-
- координаты второй заданной точки Р 2( X 0 P 2, Y 0 P 2) в неподвижной координатной системе;
-
- текущее значение длины тормозного пути S т;
-
- координаты первой заданной точки Р 1 ( X 0 P b Y 0 P 1) в неподвижной координатной системе.
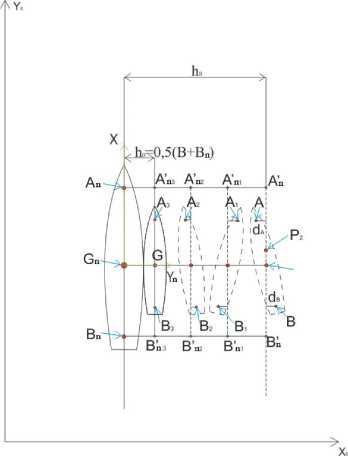
Рис. 1. Схема сближения швартующихся судов "борт к борту" в условиях открытого моря
Момент выхода швартующегося судна во вторую заданную точку Р 2 соответствует равенству координат ЦТ швартующегося судна и второй заданной точки, т.е. X 0 G = X 0 P 2, Y 0 G = Y 0 P 2.
После выхода швартующегося судна в точку Р2 осуществляется дальнейшее сближение швартующихся судов до непосредственного контакта "борт к борту". С этой целью заданное текущее положение траектории сближения швартующихся судов, т.е. линия АПВП постепенно смещается параллельно ДП судна-партнера в сторону судна-партнера со скоростью не больше допустимого значения скорости поперечного движения швартующегося судна в направлении судна-партнера уд. Скорость ь>д определяется исходя из безопасности швартовной операции, а именно из условия безопасного гашения поперечной скорости движения швартующегося судна в момент непосредственного контакта швартующихся судов средствами кранцевой защиты борта судна-партнера. Параллельное смещение линии А ПВ П в сторону судна-партнера обусловлено смещением точек А П и В П, текущее положение которых рассчитывается непрерывно в зависимости от значения расстояния h между бортами швартующихся судов. Постепенное уменьшение значения h в соответствии с законом dh/dt = f( уд, h, hо, ...)
приводит к изменению значения задаваемого расчетным способом расстояния между ДП швартующихся судов h 0 = h + 0,5 x ( ВП + В ) (здесь ВП - ширина судна-партнера, В - ширина швартующегося судна), что в свою очередь изменяет координаты точек А П и В П , и в конечном итоге линия А П В П смещается в сторону судна-партнера, оставаясь параллельной его ДП.
Смещение линии А П В П от исходного положения в сторону судна-партнера образует смещение dА , dВ носовой А и кормовой В точек швартующегося судна соответственно. Формируется сигнал управления а = - kAxdA + kBxdB , и ДП швартующегося судна приводится к новому положению линии А П В П до их полного совпадения. Далее процесс смещения линии А П В П по указанному алгоритму в сторону судна-партнера будет повторяться многократно, также многократно будут образовываться смещения носовой dА и кормовой dВ точек швартующегося судна относительно текущего положения линии А П В П . Смещения носовой А и кормовой точек В швартующегося судна относительно текущего положения линии А П В П будет приводить к формированию управляющего сигнала средства управления швартующимся судном. Работа средства управления вернет ДП швартующегося судна на линию, совпадающую с текущим положением линии А П В П .
Смещение линии А пВ п в сторону судна-партнера будет происходить до тех пор, пока расстояние h 0 между ДП швартующихся судов не будет равно значению, определяемому из выражения h 0 = 0,5 ( Вп + В ), т.е. в этот момент расстояние между бортами швартующихся судов будет равно нулю h = 0. Указанный момент в предлагаемом способе управления судном при выполнении им швартовной операции к борту судна-партнера считается моментом окончания швартовной операции.
В результате применения данного изобретения достигается возможность получения технического результата – соблюдение условия завершения швартовной операции, т.е. осуществления непосредственного контакта ("борт к борту") швартующихся судов.
3. Модельный эксперимент
Стратегией на данном этапе является управление танкером по отклонениям от некоторой прямой, названной прицельной линией – ПЛ. Это прямая, смещенная от точки нахождения цели в данный момент, которая имеет направление курса цели, т.е. направление ее ДП. Отклонения носовой и кормовой точек ДП танкера от прицельной линии определяются следующим образом:
dn = -( xs-xz )xcos( K ) + ( ys-yz )xsin( Kz ) + d 0 + p xsin( Kz kKs );
dk = -( xs-xz )xcos( K ) + ( ys-yz )xsin( Kz ) + d 0- p xsin( Kz kSCs ).
Мы используем их для формирования управляющего сигнала системы управления с помощью соотношения sign – a1 × dn a2 × dk, при этом параметры выбраны так: а1 = 1.1 и а2 = 0.9. Выбор этих параметров равными по величине приводит к управлению по направлению (Пашенцев, Юдин, 2013). Далее мы проведем оптимизационный подбор а1 и а2.
Эти формулы дают возможность моделировать движение танкера на втором этапе подхода к месту швартовки. Напомним также, что для работы на этом этапе швартовой операции мы выбрали для судна математическую модель в перемещениях. Она была идентифицирована нами ранее и используется здесь как единственная для моделирования движения. Чтобы сделать управление по отклонениям близким к реальной ситуации, нам надо получить данные о траектории движения цели. Возьмем в качестве таковой судно, лежащее в дрейфе и перемещающееся под действием внешних факторов. Выберем для этого действие ветра. Проводим моделирование движения дрейфующего судна при скорости ветра 10 м/с c направления 60 , нос судна направлен на 10 , скорость хода 0.1 м/с. Эта скорость хода необходима формально из-за структуры модели в перемещениях. В ней много членов, где скорость входит в знаменатель, поэтому она не может быть нулевой. После того, как моделирование дрейфа выполнено, координаты и курс дрейфующего судна запоминаются в трех массивах. При моделировании работы системы управления по отклонениям эти запомненные данные используются как целевые для динамического построения прицельной линии.
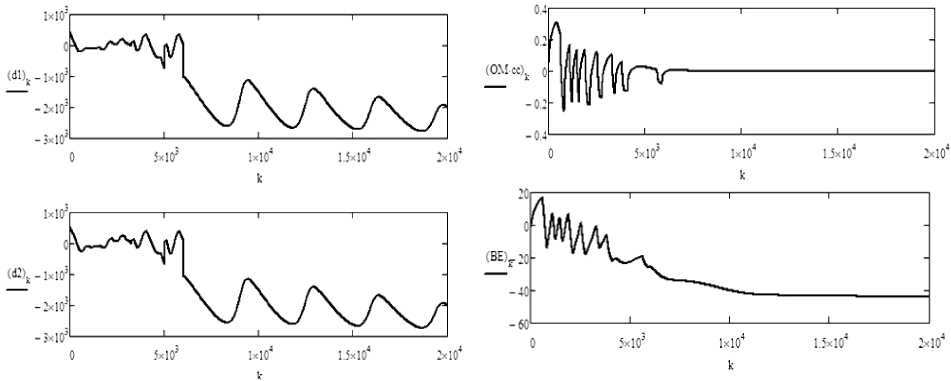
Рис. 2. Изменения во времени (сек) отклонений носовой и кормовой точек (м), угловой скорости поворота (°/с) и угла дрейфа (°) танкера при управлении по отклонениям
И только потом относительно этой линии идет управление по отклонениям. На рис. 2 и 3 приведены результаты движения швартующегося танкера при этом управлении.
На рис. 2 приведены изменения во времени отклонений носовой и кормовой точек танкера от прицельной линии, угловой скорости поворота и угла дрейфа танкера при управлении по отклонениям. Хорошо видно, что сильные изменения параметров имеют место в начальный период движения. Танкер производит разворот, во время которого происходят колебательные изменения параметров. Затем танкер ложится на устойчивый курс с небольшими изменениями кинематических параметров.
На рис. 3 приведены изменения во времени курса, управляющего сигнала, скорости перекладки руля и траектория танкера. Приведены две траектории – самого управляемого танкера (сплошная линии) и дрейфующего объекта швартовки (точечная линия). На траектории танкера хорошо виден начальный маневр с выходом на прицельную линию.
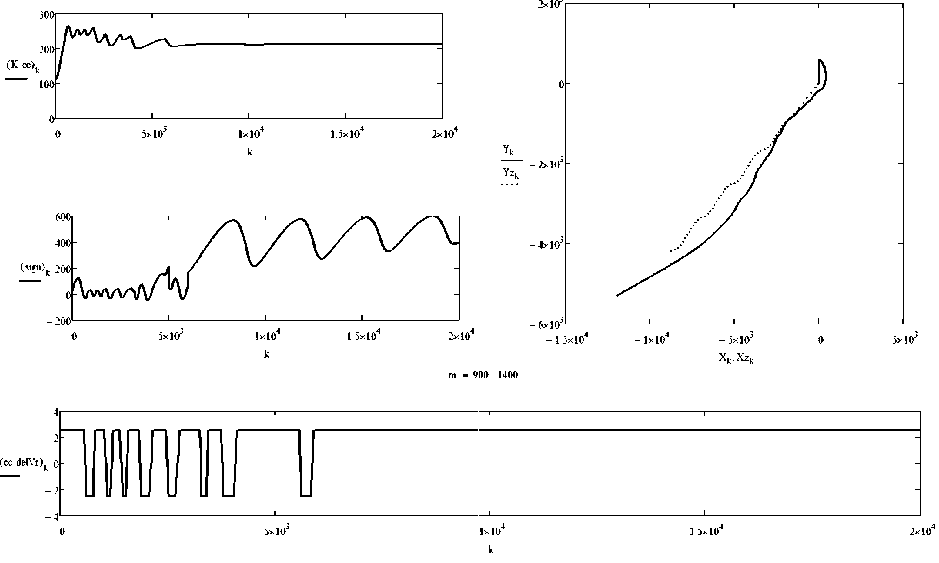
Рис. 3. Изменения во времени (сек) курса (°), управляющего сигнала, скорости перекладки руля (°/с) и траектория танкера при управлении по отклонениям
Однако на этих рисунках нет изображения самой прицельной линии. Это понятно, так как прицельная линия меняет ежесекундно свое положение. Это происходит в соответствие с перемещением цели и изменением ее курса. Но в программе моделирования в среде VB6 запрограммирована возможность проследить за положением этой целевой линии. Это делается с помощью последовательного изображения этой линии, места танкера и одновременно положения танкера относительно сторон света. Далее делается скриншот экрана программы, именно он представлен на рис. 4. Это положение судна на 3 250 сек моделирования. В левой части рисунка показаны две траектории слежения за целью с разными начальными курсами танкера. Синий кружок показывает положение самого танкера, желтая прямая линия является в данный момент прицельной линией. Изображение справа дает положение танкера относительно сторон света, положение пера руля (синий отрезок), направление вектора скорости (оранжевая линия в ЦТ танкера) и целевой линии (желтая прямая выше танкера). Видно, что руль положен на правый борт для выхода на прицельную линию. Через скриншот проглядывает основное окно программы, на котором выводится информация о моделировании. На рис. 5 показан скриншот экрана программы моделирования для другого начального курса танкера в 310°. Выбран другой момент процесса моделирования, поэтому на рис. 5 справа мы видим другое относительное расположение танкера и прицельной линии. Она ниже танкера, и его руль положен на левый борт для выхода на эту линию.
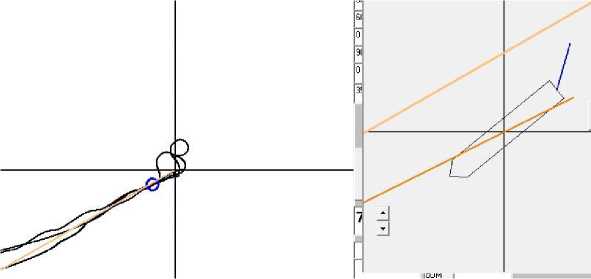
Рис. 4. Скриншот экрана программы моделирования в среде VB6
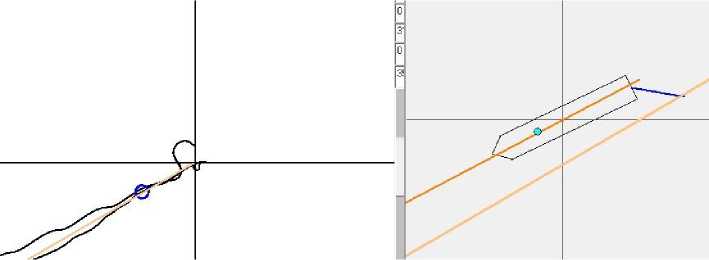
Рис. 5. Скриншот экрана программы моделирования в среде VB6 с начальным курсом танкера 310°
4. Заключение
Результаты проведенного эксперимента показывают, что компьютерная модель судна успешно следит за прицельной линией, и каждый раз при смещении линии смоделированное судно движется за ней. Это позволяет сделать вывод, что реальное судно, управляемое предложенным способом, сможет точно так же сблизиться со швартующим судном и безопасно ошвартоваться. Следовательно, предложенный способ позволяет достичь поставленной цели автоматизации швартовки в полной мере.
Список литературы Моделирование процесса швартовки к борту судна-партнера на финальном этапе сближения судов "борт к борту" с использованием инновационного способа управления судном
- Пашенцев С.В., Юдин Ю.И. Моделирование процесса управляемого движения судна вдоль линии положения. Вестник МГТУ. 2013. Т. 16, № 1. С. 141-147
- Холичев С.Н., Юдин Ю.И., Петров С.О. Моделирование процесса швартовки к борту судна-партнера с использованием инновационного способа управления судном. Вестник МГТУ. 2015. Т. 18, № 1. С. 81-87
- Юдин Ю.И., Холичев С.Н., Петров С.О. Способ управления судном при выполнении им швартовной операции к борту судна-партнера. Пат. 2475410 РФ, МПК В 63 Н 25/00 (2006.01); заявитель и патентообладатель Мурманский гос. техн. ун-т, № 2011137696/11; заявл. 13.09.2011; опубл. 20.02.2013a, бюл. № 5. 7 с
- Юдин Ю.И., Холичев С.Н., Петров С.О. Способ управления судном при выполнении им швартовной операции к борту судна, стоящего на якоре. Вестник МГТУ. 2013b. Т. 16, № 1. С. 187-192
