Моделирование процесса швартовки к борту судна-партнера с использованием инновационного способа управления судном

Автор: Холичев Сергей Николаевич, Юдин Юрий Иванович, Петров Сергей Олегович
Журнал: Вестник Мурманского государственного технического университета @vestnik-mstu
Рубрика: Транспорт
Статья в выпуске: 1 т.18, 2015 года.
Бесплатный доступ
Предложен инновационный способ швартовки одного судна к другому в условиях открытого моря. Проведен модельный эксперимент первого этапа швартовки. Доказана возможность применения предложенного способа на практике.
Способ швартовки, автоматизация швартовки, модельный эксперимент
Короткий адрес: https://sciup.org/14294778
IDR: 14294778 | УДК: 656.61.052.74
Modeling of the mooring to the partner vessel using innovative vessel’s steering methods
The innovative mooring method of one vessel to another in the open sea conditions has been proposed. The model experiment of the first stage of mooring has been conducted. The possibility of application of the proposed method in practice has been proved.
Текст научной статьи Моделирование процесса швартовки к борту судна-партнера с использованием инновационного способа управления судном
Процесс швартовки одного судна к другому в открытом море – весьма распространенный вид судовых ключевых операций, сопряженный с риском столкновения швартующихся судов. Поэтому оптимизация процесса операций такого типа всегда была и будет актуальна. В данной статье авторы предлагают инновационный запатентованный способ швартовки одного судна к другому в условиях открытого моря. Описаны результаты модельного эксперимента, которые доказывают возможность применения данного способа на практике.
2. Способ швартовки
Авторами разработан способ управления швартующимся судном при выполнении им швартовной операции к борту судна-партнера ( Юдин и др ., 2013a), когда в пределах контуров швартующегося судна и судна-партнера, в их диаметральных плоскостях выбирают по две точки, одна из которых находится на носовой части А (швартующееся судно), Ап (судно-партнер), другая – на кормовой части В (швартующееся судно), Вп (судно-партнер) относительно мидель-шпангоута соответствующего судна (рис. 1).
Координаты точек А , В , Ап , Вп в неподвижной координатной системе определяют непрерывно с высокой точностью (±1,0 м). Используя значения координат точек швартующегося судна А ( X 0 A , Y 0 A ) В ( X 0 B , Y 0 B ) и судна-партнера А п ( X 0 Aп , Y 0 Aп ), В п ( X 0 Вп , Y 0 Вп ) в неподвижной координатной системе, координаты тех же точек в подвижных системах координат, связанных c швартующимся судном А ( XA , Y A ), В ( X B , Y B ) и судном-партнером А п ( X Aп , Y Aп ), В п ( X Вп , Y Вп ), координаты центров тяжести (ЦТ) швартующегося судна в связанной с ним подвижной координатной системе G ( XG , YG ) и судна-партнера в связанной с ним подвижной координатной системе G п ( X 0 Gп , Y 0 Gп ), а также значения расстояния между диаметральными плоскостями (ДП) швартующихся судов h 0 и расстояние между ЦТ швартующихся судов m рассчитывают ( Юдин и др ., 2013b):
-
– координаты центра тяжести швартующегося судна G ( X 0 G , Y 0 G ) в неподвижной координатной системе;
-
– координаты центра тяжести судна-партнера G п ( X 0 Gп , Y 0 Gп ) в неподвижной координатной системе;
-
– координаты точек А п ( Х А п , YA п ) и В п ( XB п , YB п ), расположенных на перпендикулярах к ДП судна-партнера, восстановленных в точки Ап и Вп ;
-
– координаты проекции ЦТ судна-партнера G п ( X 0 G п , Y 0 G п ) в неподвижной координатной системе на траекторию сближения в конечной стадии швартовки, проходящую параллельно ДП судна-партнера через точки A п и В п ;
-
– координаты второй заданной точки Р 2( X 0 P 2, Y 0 P 2) в неподвижной координатной системе;
-
– текущее значение длины тормозного пути S т;
-
– координаты первой заданной точки Р 1( X 0 P 1, Y 0 P 1) в неподвижной координатной системе.
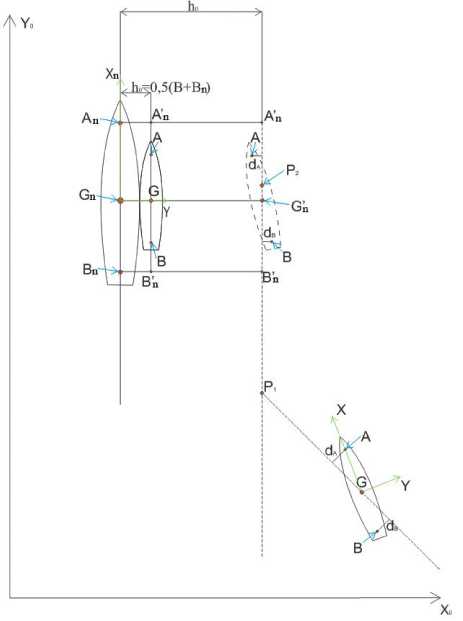
Рис. 1. Схема способа швартовки одного судна к другому в условиях открытого моря
Зная координаты первой заданной точки и координаты центра тяжести швартующегося судна, определяют текущее положение траектории сближения, проходящей через первую заданную точку Р 1( X 0 P ь Y 0 P 1 ) и центр тяжести швартующегося судна G ( X 0 G , Y 0 G ). После этого определяют поперечные смещения точек А и В от найденной указанным способом траектории сближения.
Непрерывно определяемые значения координат точек А и В , А п и В п позволяют непрерывно вычислять координаты центра тяжести швартующегося судна G , а вместе с непрерывно определяемым текущим значением длины тормозного пути S т и координатами первой заданной точки Р 1 - также поперечные смещения d A и d B точек А и В швартующегося судна от текущего положения траектории сближения ( Юдин, Пашенцев , 2012).
Возникающие поперечные смещения вырабатывают сигнал на отклонение рулевого органа, например руля швартующегося судна, по закону:
а = - kA х dA + kB х dB , (1) где k A , kB - коэффициенты усиления по перечным смещениям носовой и кормовой точек швартующегося судна от текущего положения траектории сближения.
Таким образом, швартующееся судно движется по линии GP 1 в направлении точки Р 1.
В момент выхода швартующегося судна в первую заданную точку, что соответствует равенству координат центра тяжести швартующегося судна G ( X 0 G , Y 0 G ) и координат первой заданной точки Р 1( X 0 G , Y 0 P 1) ( X 0 G = X 0 Р 1; Y 0G = Y 0 P 1), оно переходит к сближению со второй заданной точкой Р 2, при этом текущее положение траектории сближения соответствует положению линии, проходящей через точки А п ( Х Ап , Y A п ) и Вп ( X B п , Y B п ), координаты которых рассчитываются непрерывно. Текущие координаты второй заданной точки Р 2( X 0 P 2, Y 0 P 2), лежащей на линии АпВп , также вычисляются непрерывно.
Непрерывно определяемые значения координат точек А и В , Ап и В п позволяют непрерывно вычислять координаты точек А п и Вп , ЦТ швартующегося судна G и ЦТ судна-партнера Gп , второй заданной точки Р 2 в неподвижной координатной системе, а также поперечные смещения d A и dB точек А и В швартующегося судна от текущего положения траектории сближения, которой является линия АпВп .
Возникающие поперечные смещения вырабатывают сигнал на отклонение рулевого органа, например руля швартующегося судна, по известному закону. Таким образом, швартующееся судно движется в точку Р 2 по линии АпВп .
Моментом окончания сближения швартующегося судна с судном-партнером считается момент выхода швартующегося судна во вторую заданную точку Р 2, что соответствует равенству координат ЦТ швартующегося судна и второй заданной точки, т.е. X 0 G = X 0 P 2, Y 0 G = Y 0 P 2.
3. Модельный эксперимент
Как было сказано выше, на первом этапе швартовки мы должны выйти в некоторую точку линии прицеливания, удаленную от цели на заданное расстояние. Координаты такой точки легко находятся по заданному расстоянию от цели Д и параметрическому уравнению линии прицеливания:
xx+ dd X cos( K ) + Д sin( Kz ); yx+ dd Xsin( Kz ) Д cos( Kz ).
Здесь dd 0 – параллельное смещение ЛП от цели, а параметры с индексом z относятся к самой цели. Управляющий сигнал формируется как пропорциональный отклонению курса судна от направления на переменную точки с координатами (2). Для судна результаты такого моделирования показаны на рис. 2. На данном рисунке показаны три пронумерованные траектории. Они отличаются координатами прицельной точки и начальными курсами судна. Начальная скорость хода одинакова и равна 3 м/с, ветра и волнения нет, время слежения 3 000 с (50 мин).
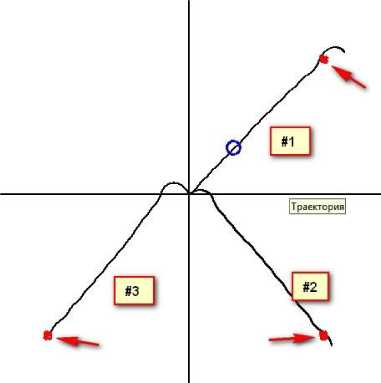
Рис. 2. Подход танкера к цели при управлении отклонением курса от направления на цель – траектории № 1, № 2, № 3
Данные по траекториям приведем в табл. 1. Стрелками показаны "облака" целевых точек. Они получены вариацией положения целевых точек в радиусе 250 м. Тем самым управление ведется по направлению на переменную точку.
Таблица 1. Данные по траектории
|
№ траект. |
К 0 , град. |
V 0 , м/с |
Xц , м |
Yц , м |
Т , сек |
|
1 |
55 |
3 |
5 000 |
5 000 |
3 000 |
|
2 |
65 |
3 |
5 000 |
–5000 |
3 000 |
|
3 |
320 |
3 |
–5000 |
–5000 |
3 000 |
Управление выбрано в соответствии с принятой стратегией: – управляющий сигнал sign – b × ΔК – с × d(ΔК) / dt, – скорость перекладки руля как функция управляющего сигнала v 0;
sign lim v v 1;
max lim lim
v max
sign lim ;
lim sign lim ;
sign lim .
Параметры этой стратегии управления выбраны такие:
b = 160, c = 400, lim 1 = 3, lim 2 = 14.
Они найдены путем подбора, оптимизацией управления с помощью принятых критериев. Процедуру этого подбора и результаты ее приведем ниже подробным образом. Фактически эта процедура – метод градиентного спуска ( Пашенцев, Юдин , 2013).
Здесь же опишем результаты проведенных модельных испытаний.
Из табл. 1 следует, что траектория № 1 имеет начальный курс 55 , целевая точка расположена на NE, поэтому управление не требует начального маневра. Две другие траектории приводят к необходимости начального маневра. Так, на траектории № 2 начальный курс судна равен 65 , а цель лежит на SE. Поэтому система управления производит начальный маневр и далее выходит на обычный режим управления. На траектории № 3 начальный курс 320 , цель расположена на SW, поэтому здесь также возникает начальный маневр. Главное в этих испытаниях состоит в том, что система управления во всех случаях работает правильно, и движение к цели завершается выходом к целевой точке. Но, возможно, при ручном управлении этот начальный маневр можно произвести более эффективно, и только после его выполнения перейти на управление автоматическое. Траектории № 2, 3 приведены для того, чтобы показать работоспособность системы управления по отклонению курса от направления на цель в этих сложных случаях, хотя в жизненной ситуации судоводитель произведет начальный маневр вручную, а затем включит систему управления. Показатели качества управления вычислены вдоль траектории № 1, они равны Q 1 = 0.2168, Q 2 = 0.0070. По двум другим траекториям показатели не вычислялись, т.к. нам нежелателен вклад начального маневра, который формально ухудшит эти показатели. Более того, показатели рассчитывались по 2 500 точкам, а не по всем 3 000. Дело в том, что когда судно проходит область целевых точек, действующая система управления начинает поворачивать судно назад. Этот поворот хорошо виден на траектории № 1 вблизи концевой точки. Разумеется, в этот момент в реальности система управления либо выключается с переходом на ручное управление либо происходит переход на другую стратегию управления.
На рис. 3-5 показаны в графической форме основные параметры, сопровождающие движение танкера вдоль траектории № 1. Так, на рис. 3 приведены изменения курса судна, угловой скорости поворота, кладки руля и угла дрейфа в градусах (или град/с). На рис. 4 – изменение продольной и поперечной скорости судна, скорости перекладки руля и сама траектория № 1. Зачернения на рис. 4 вызваны плотностью шкалы времени, эти участки отражают области с частым изменением скорости перекладки руля. Поэтому на рис. 5 приведены скорости перекладки руля для двух диапазонов времени: от 0 до 100 сек и от 2 000 до 2 100 сек, т.е. оба диапазона имеют длительность всего 100 сек. Здесь хорошо виден характер изменений скорости перекладки руля в процессе работы системы управления.
При моделировании проверена работа системы управления при возникающих возмущениях. Для этого на 1 000 сек в процесс моделирования были внесены точечные изменения угловой скорости и угла дрейфа, примерно пятикратные, причем угол дрейфа изменился даже по знаку. Система справилась с этими возмущениями и, отработав их, продолжила обычное управление примерно через 250 сек. Изменения кинематических параметров и траектории при этом возмущении приведены на рис. 6. Изменение скорости перекладки руля показано на рисунке в растянутой шкале от 990 до 1 500 сек (нижний график). На нем хорошо видна длительная выдержка руля в крайнем положении на левом борту. Реально таких возмущений быть не должно, но моделирование позволяет создавать
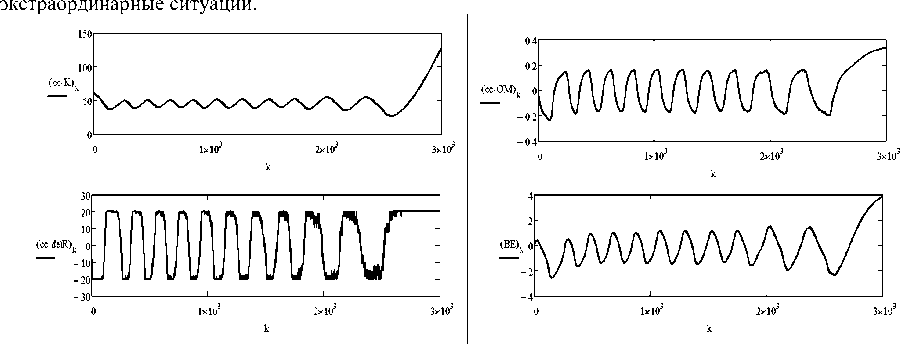
Рис. 3. Изменение курса судна, угловой скорости поворота, кладки руля и угла дрейфа на траектории № 1 танкера
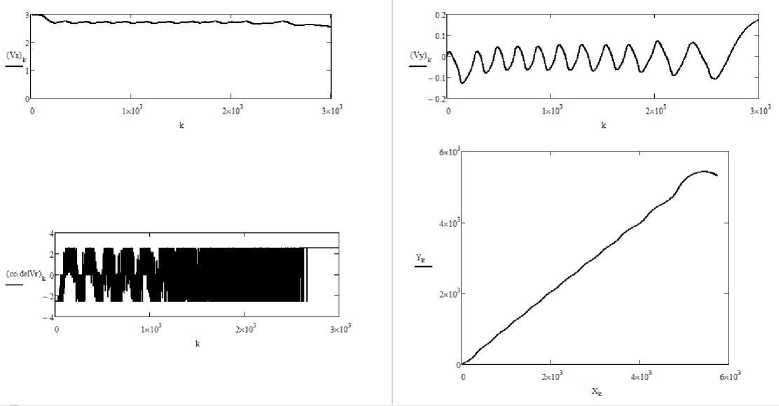
Рис. 4. Изменение продольной и поперечной скорости судна, скорости перекладки руля на траектории № 1 танкера
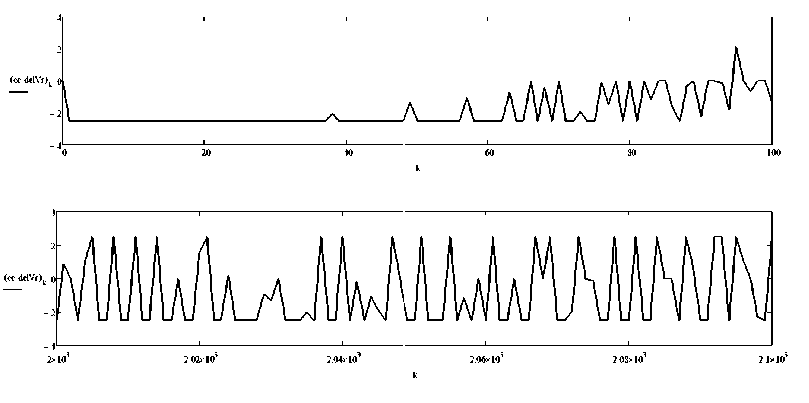
Рис. 5. Изменение скорости перекладки руля от 0 до 100 сек и от 2000 до 2 100 сек на траектории № 1 танкера
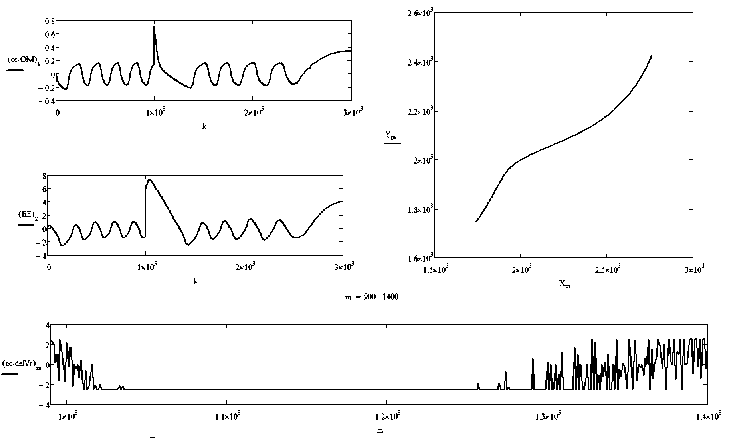
Рис. 6. Результаты отработки системой управления возмущений угловой скорости и угла дрейфа на 1 000 сек
Показав возможности данной стратегии управления, вернемся к проблеме синтеза, т.е. выбора параметров управляющей системы. Это коэффициенты усиления b и c в законе выработки управляющего сигнала и параметры lim 1 и lim 2 в законе выработки скорости поворота руля v α по управляющему сигналу sign . Для их определения был выбран метод покоординатного спуска при поиске экстремума показателей качества Q 1 или Q 2 . Проведено 11 опытов моделирования работы системы управления на базе траектории № 1 с изменениями синтезируемых параметров. Результаты такого моделирования приводятся в табл. 2.
Таблица 2. Результаты моделирования на базе траектории № 1
|
b |
c |
lim 1 |
lim 2 |
Q 1 |
Q 2 |
|
120 |
400 |
3 |
14 |
0.2245 |
0.0071 |
|
150 |
400 |
3 |
14 |
0.2222 |
0.0070 |
|
160 |
400 |
3 |
14 |
0.2168 |
0.0070 |
|
170 |
400 |
3 |
14 |
0.2320 |
0.0071 |
|
160 |
400 |
3 |
16 |
0.2270 |
0.0071 |
|
160 |
400 |
3 |
15 |
0.2305 |
0.0071 |
|
160 |
400 |
3 |
13 |
0.2260 |
0.0071 |
|
160 |
500 |
3 |
14 |
0.2311 |
0.0072 |
|
160 |
300 |
3 |
14 |
0.2328 |
0.0073 |
|
160 |
400 |
2 |
14 |
0.2223 |
0.0070 |
|
160 |
400 |
4 |
14 |
0.2271 |
0.0071 |
Последовательный анализ полученных данных позволил выбрать набор параметров из третьей строки табл. 2: b = 160, c = 14, lim 1 = 3, lim 2 = 14, с которыми и проводились все остальные моделирования работы системы управления.
Приведем на рис. 7 траекторию танкера с начальным курсом 240° и продолжительностью моделирования движения 7 000 сек. В начале траектории действие системы управления вызывает почти полную циркуляцию с тем, чтобы взять курс на целевую область на NE.
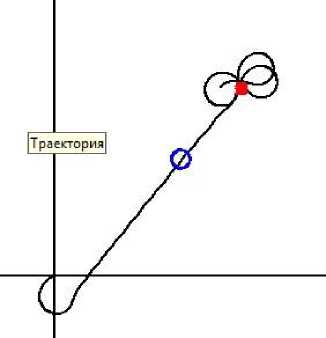
Рис. 7. Траектория танкера при начальном курсе 240° и продолжительностью движения 7 000 сек
Во время слежения за объектом в течение 3 000 сек поведение судна вблизи цели было видно не всегда. Здесь время моделирования взято равным 7 000 сек, поэтому поведение судна вблизи целевой области хорошо прослеживается. Судно под действием системы управления делает около трех циркуляций, возвращаясь каждый раз в целевую область. Необходимо подчеркнуть, что данным утверждением только демонстрируется поведение системы управления в модели. В реальности в этом случае судоводитель перейдет к ручному управлению судном.
4. Заключение
Авторами предложен инновационный и запатентованный способ швартовки одного судна к другому в условиях открытого моря. Представлен результат модельного эксперимента, проведенного с целью доказать возможность применения способа на практике. На основании представленных данных можно с уверенностью сказать, что предложенный авторами способ управления судами при швартовке одного судна к другому в условиях открытого моря может быть использован для автоматизации данной операции, что и было доказано в расчетах.
Список литературы Моделирование процесса швартовки к борту судна-партнера с использованием инновационного способа управления судном
- Пашенцев С.В., Юдин Ю.И. Моделирование процесса управляемого движения судна вдоль линии положения. Вестник МГТУ. 2013. Т. 16, № 1. С. 141-147
- Юдин Ю.И., Пашенцев С.В. Моделирование управляемого движения судна по произвольной траектории. Эксплуатация водного транспорта: ежекварт. сб. науч. ст. СПб., ГМА им. адм. С.О. Макарова, 2012. Вып. 3 (69). С. 32-36
- Юдин Ю.И., Холичев С.Н., Петров С.О. Способ управления судном при выполнении им швартовной операции к борту судна-партнера. Пат. 2475410 РФ, МПК В 63 Н 25/00 (2006.01); заявитель и патентообладатель Мурман. госуд. техн. ун-т, № 2011137696/11; заявл. 13.09.2011; опубл. 20.02.2013a, бюл. № 5. 7 с
- Юдин Ю.И., Холичев С.Н., Петров С.О. Способ управления судном при выполнении им швартовной операции к борту судна, стоящего на якоре. Вестник МГТУ. 2013b. Т. 16, № 1. С. 187-192
