Моделирование процесса управляемого движения судна вдоль линии положения

Автор: Пашенцев Сергей Владимирович, Юдин Юрий Иванович
Журнал: Вестник Мурманского государственного технического университета @vestnik-mstu
Статья в выпуске: 1 т.16, 2013 года.
Бесплатный доступ
Предложен способ управления движением судна, выполняющего швартовную операцию к борту другого судна. Способ основан на определении текущих значений отклонений носовой и кормовой точек судна от заданной траектории и на последующем формировании сигнала управления, пропорционального комбинации этих отклонений. Представлена оценка эффективности такого управления. Выполнено программное моделирование управляемого движения в соответствии с предложенным законом управления.
Линия положения, модель судна, способ управления, сигнал управления, управляющий комплекс
Короткий адрес: https://sciup.org/14294537
IDR: 14294537
Текст научной статьи Моделирование процесса управляемого движения судна вдоль линии положения
Автоматически управляемое движение судна – одно из важнейших направлений современной интеллектуализации транспортных систем. Настоящая работа ставит своей целью с помощью компьютерного моделирования показать реализуемость и эффективность предложенного способа управления буксируемым судном.
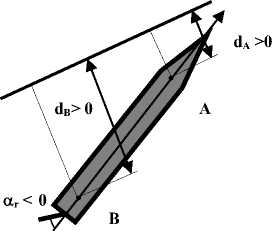
Прежде чем начать моделирование управляемого движения, следует оговорить его общие принципы. В их основу положен патентный продукт ( Юдин, Пашенцев , 2008) авторов статьи, в котором введено понятие линии пути (ЛП). Эта линия находится тем или иным способом и зависит от поставленной задачи управления. Значения координат точек А и В судна позволяют непрерывно вычислять поперечные смещения dА и dВ от текущего положения ЛП. При этом, для определенности, поперечное смещение рассматриваемой точки от ЛП считается положительным, если точка смещается вправо от ЛП, и отрицательным, если она смещается влево. Основные варианты возможного расположения судна относительно ЛП показаны на рис. 1а, б; 2а, б.
С помощью возникающих поперечных смещений вырабатывается сигнал на отклонение рулевого органа, например руля судна, по закону:
α r = – k Α × d Α + k B × d B , (1)
где k A , k B – коэффициенты усиления по поперечным смещениям носовой и кормовой точек судна от ЛП. Это положительные величины, причём kА больше kВ . Традиционно угол перекладки руля α r считается положительным при его перемещении в сторону правого борта.
На рис. 1а диаметральная плоскость (ДП) судна (4) пересекает ЛП (2) под некоторым углом, величина которого характеризуется значениями поперечных смещений точки А ( d А ) и точки В ( d В ), при этом d А > 0 , d В < 0 . Тогда, согласно закону управления (1), угол отклонения руля будет иметь отрицательное значение, т.е. руль будет переложен на левый борт, и судно начнёт вращение влево, что приведёт к изменению dА и dВ и в конечном итоге – к выходу судна на ЛП и пересечению её по инерции. Во втором случае (рис. 1б), согласно закону (1), угол отклонения руля будет иметь положительное значение, т.е. руль будет переложен на правый борт, и судно начнёт вращение вправо, что приведёт к изменению dА , dВ и к выходу судна на ЛП. Два первых рисунка (рис. 1а, б) представляют случаи, когда судно находится на ЛП и пересекает её.
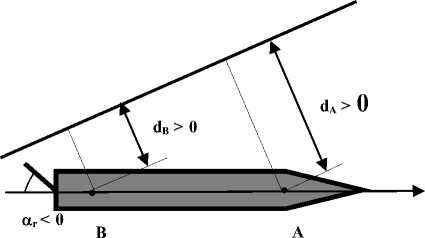
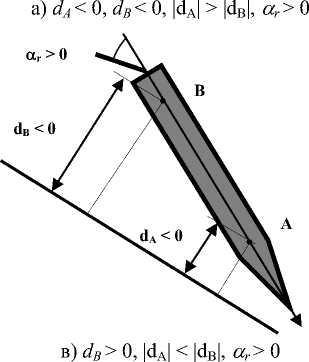
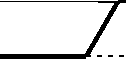
Два следующих рисунка (рис. 2а, б) описывают случаи, когда судно находится целиком за ЛП и удаляется от неё. Ещё на двух рисунках (рис. 2в, г) судно находится целиком за ЛП и приближается к ней.
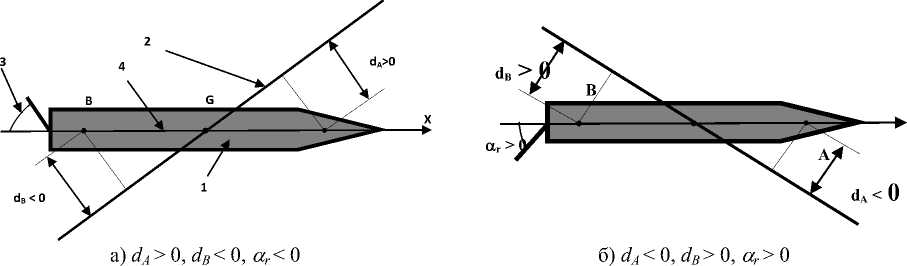
Рис. 1. Судно пересекает ЛП
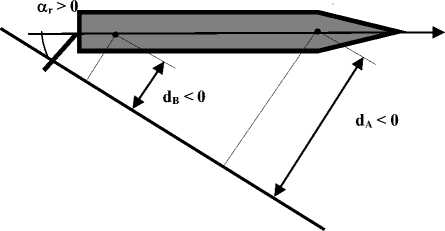
б) d B < 0, |d A | > |d B |, α r > 0
г) d A > 0, d B > 0, |d A | < |d B |, α r < 0
Рис. 2. Судно по одну сторону от ЛП
Следует иметь в виду, что возможны случаи, когда судно расположено параллельно ЛП и находится слева или справа от ЛП. В этом случае расстояния dА и dВ равны друг другу и по величине, и по знаку. Заметим, что анализ знака комплекса ( k Α × d Α + k B × d B ) во многих случаях требует знания величин коэффициентов усиления k Α и k B . Эти коэффициенты должны зависеть от положения точек А и В на ДП судна и от степени симметрии носовой и кормовой частей судна по отношению к миделю. В идеале при равных расстояниях хА и хВ вдоль ДП от центра тяжести (ЦТ) G и симметрии корпуса эти коэффициенты должны быть равны. В данном случае при параллельном положении ДП судна относительно ЛП руль должен быть поставлен в ДП, и поворот судна будет происходить по инерции. Поэтому даже в грубых прикидочных рассуждениях коэффициент k Α должен быть несколько больше коэффициента kB , например, k Α = 1.1, а kB = 0.9 при равных расстояниях хА и хВ . Скорее всего, отношение этих коэффициентов обратно пропорционально отношению расстояний выбранных точек А и В от центра вращения с координатой х 0 ( Соболев , 1976). Более точное определение этих коэффициентов требует решения некоторой оптимизационной задачи, связанной с оценкой качества управления.
-
2. Формирование управляющего сигнала
Управление (1) – не единственно возможное. Оно предполагает, что руль перекладывается в новое положение мгновенно, чего не происходит в реальности. Поэтому другим похожим законом управления будет закон, который определяет скорость перекладки руля:
υ α = – k Α × d Α + k B × d B .
При этом будет действовать естественное ограничение на величину самой перекладки руля, которая не должна превосходить максимальной, заданной для конкретного рулевого устройства судна.
Более тонкий способ управления состоит в выработке некоторого управляющего сигнала sign , величина которого определяет скорость перекладки руля (или его положение). Например:
sign = – k Α × d Α + k B × d B ,
скорость перекладки руля от самого сигнала выражается графически, рис. 3.
υ α max

lim1 lim2
sign
Рис. 3. Зависимость скорости перекладки руля от сигнала управления sign
Этот закон управления достаточно универсален и содержит зону нечувствительности ( sign < lim 1), зону насыщения ( sign > lim 2) и переходную между ними зону (lim 1 < sign < lim 2) линейного изменения скорости перекладки. Закон предполагает асимметричное отображение для отрицательных значений сигнала ( sign < 0). В этих зонах скорость перекладки меняется следующим образом (для sign > 0):
υα = 0 sign =< lim 1,
υα = υα max × ( sign – lim 1)/(lim 2 – lim 1) lim 1 < sign < lim 2, (4)
υα = υα max sign >= lim 2.
Инерцию самого судна, а не только рулевого привода, можно учесть неявно, подбором границ зон. Однако эффективнее сделать этот учёт явным и добавить в закон формирования управляющего сигнала член, который зависит от текущего положения пера руля α r :
sign = – k Α × d Α + k B × d B + k α × α r . (5)
Эти законы управления придётся моделировать отдельно, оценивая каждый раз их эффективность.
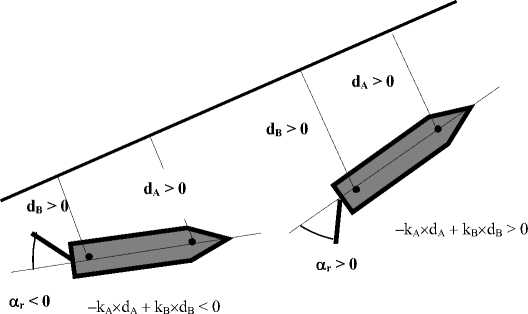
Рис. 4. Момент переключения положения пера руля
На рис. 4 показан момент изменения положения пера руля. Это момент, когда в законе, например (2), комплекс – kΑ×dΑ + kB×dB, управляющий рулём, меняет свой знак. В данном случае он меняет знак с отрицательного на положительный. Следовательно, руль из положения "на левый борт" будет изменять его в положение "на правый борт". Обратим внимание, что при таком законе управления судно начнёт переключение руля ещё до пересечения ЛП, только начав двигаться в её сторону. Более тонко этот момент можно отрегулировать выбором коэффициентов усиления kА и kВ. Аналогичное изменение положения пера руля с правого борта на левый произойдет по другую сторону от ЛП. Мысленно можно отразить рисунок зеркально в ЛП.
При использовании этих законов базовыми величинами являются расстояния от определённых точек, например швартующегося судна, до задаваемой или вычисляемой ЛП. Важнейшей среди них является прямая, которая параллельна линии перемещения швартующего судна на заданном расстоянии от него. Пусть это судно как цель перемещается с координатами ( xz , yz ) и имеет курс Kz . Уравнение прямой, которая параллельна его курсу и расположена в dd 0 метрах от него, удобнее всего записать в нормированном виде. Такое уравнение выглядит наиболее просто и позволяет легко находить расстояния до этой прямой от любых точек:
-( x - X z ) X COs( K z ) + (y - y z ) X sin( K z ) + d d 0 = 0.
Знак dd 0 позволяет смещать параллельную прямую в ту или другую сторону.
Возьмем на ДП швартующегося судна две точки, которые расположены на равных расстояниях от центра тяжести и запишем их координаты:
X n = x s + l x sin( K s ); y n = ys + l x cos( Ks );
X k = X s - l x sin( K s ); y k = y s - l x cos( K s ).
Здесь индексами n , k обозначены признаки точек в носу и в корме швартующегося судна; индексом s – признаки центра тяжести (ЦТ) швартующегося судна. Тогда расстояния этих точек до ЛП (6) находятся простой подстановкой их координат (7) в это уравнение. Получаем следующие выражения:
d n = —( X n — X z ) X cos( K z ) + ( y n - y z ) X sin( K z ) + d d 0 ; d k = -( X k - X z ) x cos( K z ) + (y k - y z ) x sin( K z ) + d d 0 .
Можно расшифровать выражения (7) и преобразовать получившиеся формулы, что даёт следующее:
d n = -( X s - X z ) X cos( K z ) + ( y s - y z ) X sin( K z ) + d d 0 + l X sin( K z - K s );
d k = -( X s - X z ) X cos( K z ) + ( y s - y z ) X sin( K z ) + d d 0 - l X sin( K z - K s ).
Возьмём теперь комбинацию расстояний –dn + dk, т.е. фактически возьмём равные коэффициенты усиления в законе (1). После несложных преобразований получаем результат в виде: -dn + dk = 21 x sin(Ks - Kz). Это означает, что при равных коэффициентах усиления в законе управления (1) он превращается в хорошо известный закон управления по отклонению курса швартующегося судна от курса швартующего судна. Это ещё раз подтверждает вывод о том, что коэффициенты усиления следует выбирать различные по величине.
-
3. Оценка качества управления судном
В научной литературе ( Антомонов , 1964; Фельдбаум , 1953; Карасев и др ., 1967) описано множество подходов к такой оценке. При моделировании подходов швартующегося судна к швартующему судну нами были выбраны два критерия оптимальности. В качестве первого критерия возьмем потерю скорости хода при изменении курса, которую можно выразить интегралом:
T
Q 1 = J [ u x sin( K - в - K 0)] dt .
Естественно, что при численном моделировании интеграл переходит в суммирование, которое производится по всем точкам траектории подхода к месту швартовки:
Q 1 = S [ U k x sin( K k - P k - K 0)] dt .
В выражениях для критерия Q (10, 11) фигурируют К – курс швартующегося судна; К 0 – его уставное значение для управления; и , P - скорость и угол дрейфа. При этом К 0 может быть и переменным, если ЛП в процессе подхода к месту швартовки меняет свое положение. По самому смыслу введенного критерия он должен быть тем меньше, чем качественнее управление судном. Такой критерий позволяет сравнивать различные варианты управления, изменяя в них, например, пределы (4) управляющего сигнала для переключения рулевого привода, или коэффициенты усиления (3) при отклонениях для формирования управляющего сигнала. Однако при этом траектории подхода будут различными, и более длинная траектория накопит большую сумму вида (11). Поэтому логично отнести качество к одной точке траектории, поделив сумму на число слагаемых. Кроме того, сумму следует нормировать, поделив её на начальную скорость судна и 0.
Возможен другой критерий, который представляется нам удобным. Он имеет форму, в которую входит отклонение курса швартующегося судна от некоторого среднего значения (зарыскивание) и отклонение руля от нулевого положения в ДП. Этот критерий может быть таким:
Q 2 = S [( K k - K 0 )2 + p x « 2 ] . (12)
Здесь критерий представлен сразу в виде суммы, минуя форму интегральную. Эту сумму логично нормировать, относя первое слагаемое к квадрату начального курса К 0, а второе – к квадрату модуля предельного положения руля. Поскольку слагаемые носят квадратичный характер, из результирующей суммы извлекается квадратный корень. Как и выше, отнесем результат к одной точке, поделив его на число слагаемых. В этом критерии используются сразу две характеристики - зарыскивание и перекладки руля, т.е. критерий носит комплексный характер. Поэтому в выражение (12) входит весовой множитель р , позволяющий уравновесить эти два показателя. Исходя из требований к зарыскиванию ( ® 8 ° ) и зная порядок предельной кладки руля (в общем случае ® 35 ° ), можно взять этот множитель как (8/35)2 ® 0.05. Именно таким в нашем случае он и выбран при подсчётах качества управления. После введения критериев Q 1 и Q 2 можно производить собственно моделирование различных вариантов подхода к швартующему судну, используя разные управления.
-
4. Моделирование движения вдоль ЛП
Из общих принципов подхода к месту швартовки известно, что на данном этапе сближения мы используем управление по отклонениям от ЛП. Такая линия, в данном случае, строится как прямая, смещенная от точки нахождения швартующегося судна в данный момент и имеющая направление курса швартующего судна (направление её ДП). Все соответствующие формулы приведены выше – это формулы (6-9). С их помощью мы получаем отклонения носовой и кормовой точек ДП швартующегося судна от ЛП, а затем используем их для формирования управляющего сигнала системы управления sign = - a 1 x dn + a 2 x dk . Имея все эти формулы, мы можем легко производить моделирование данного этапа подхода к месту швартовки.
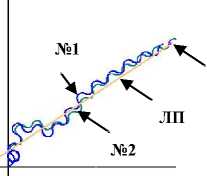
На рис. 5 изображены три траектории движения танкера "Саратов", который управляется с помощью комбинации отклонений носовой и кормовой точек от ЛП. Базовой траекторией является траектория № 1 с начальным курсом 60 ° . ЛП изображена желтым цветом; видно, что она смещена от облака точек цели. Две другие траектории отличаются начальным курсом судна (170 ° и 330 ° ), но судно всё равно выводится на ту же линию прицеливания, что свидетельствует об устойчивости этого способа управления.
Рис. 5. Траектории танкера "Саратов" при управлении с формированием управляющего сигнала по двум отклонениям от линии прицеливания (ЛП)
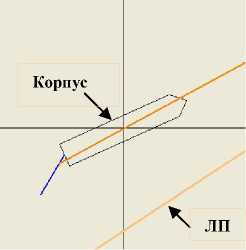
Рис. 6. Положение корпуса судна и ЛП при движении по траектории
За положением корпуса судна относительно ЛП можно наблюдать в программе в отдельном поле, которое показано на рис. 6. Там же показаны направление движения судна и положение пера руля. Это позволяет проследить за поведением судна вдоль траектории подхода на конечном этапе швартовки. На рис. 7 приводятся значения курса швартующегося судна К , угла перекладки руля delR и управляющего сигнала sign , а на рис. 8 – значения отклонений носовой O 1 и кормовой O 2 точек шва судна от ЛП и управляющего сигнала sign вдоль траектории перемещения швартующегося судна в процессе управления им. Траектории напоминают движение при управлении судном с помощью отклонения курса от направления на цель. Однако это иное управление, и его можно применять на любых расстояниях до цели, вплоть до непосредственного контакта.
Как и в случае ориентирования на переменную точку, при управлении относительно ЛП можно варьировать параметры формирования управляющего сигнала а 1, а 2, lim 1, lim 2. Получая при этом разные траектории движения судна, мы можем сравнивать их с помощью введенных ранее показателей качества Q 1 или Q 2 . Траектории незначительно отличаются друг от друга, на черно-белых рисунках выглядят почти неразличимо и поэтому не приводятся. Численные результаты варьирования в пяти вариантах даются в табл. 1 для танкера "Саратов". Естественно, им соответствуют пять траекторий.
Таблица 1
|
№ 1 |
№ 2 |
№ 3 |
№ 4 |
№ 5 |
|
|
а 1 |
20 |
20 |
20 |
24 |
16 |
|
а 2 |
2 |
2 |
2 |
1 |
4 |
|
lim 1 |
3 |
5 |
1 |
1 |
1 |
|
lim 2 |
12 |
20 |
8 |
8 |
8 |
|
Q 1 |
0.081 |
0.089 |
0.078 |
0.079 |
0.077 |
Табличные результаты (табл. 1) варьирования параметров управления показывают большую устойчивость управления по отклонениям в сравнении с управлением по отклонению курса. Такой вывод гарантирует перспективы применения этого способа управления при решении ряда задач сложного маневрирования.
Аналогичные детали моделирования приведём для другого судна – траулера "Б. Зайцев". Ранее были приведены результаты модельных испытаний при управлении этим судном с помощью отклонения курса от ЛП (рис. 9, 10). Отмечена высокая поворотливость такого судна. На рис. 9 даны две траектории траулера при управлении им с помощью отклонений носовой и кормовой точек от ЛП.
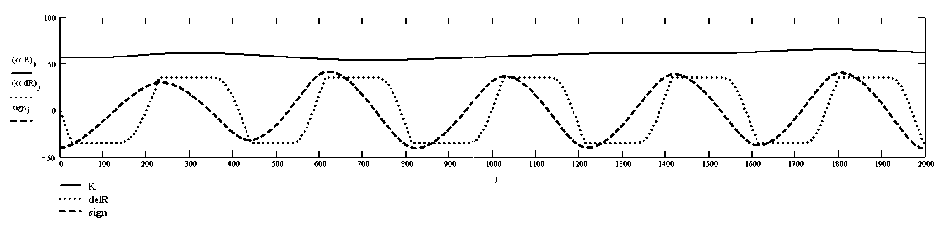
Рис. 7. Изменение во времени: курса швартующегося судна К , угла перекладки руля delR и управляющего сигнала sign
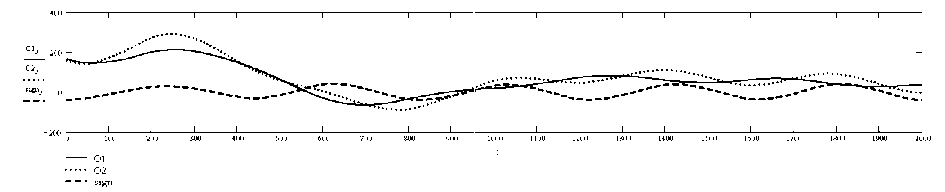
Рис. 8. Изменение во времени: отклонение носовой О 1 и кормовой О 2 точек судна от ЛП и управляющего сигнала sign
Хорошо видно, что поворотливое судно ведёт себя отличающимся от других судов образом, особенно в первые моменты маневрирования под управлением системы. Затем, при выходе на ЛП, поведение его становится похожим на поведение танкера "Саратов". Но качество этого поведения несколько иное. Например, для базовой траектории Q 1 = 0.378 и Q 2 = 0.045. Это примерно в четыре раза большие показатели, чем базовые для танкера "Саратов". Вариации параметров при формировании управляющего сигнала по отклонениям дали результаты, которые приведены в табл. 2.
Таблица 2
|
№ 1 |
№ 2 |
№ 3 |
№ 4 |
№ 5 |
|
|
а 1 |
20 |
20 |
20 |
24 |
16 |
|
а 2 |
2 |
2 |
2 |
1 |
4 |
|
lim 1 |
3 |
5 |
1 |
1 |
1 |
|
lim 2 |
12 |
20 |
8 |
8 |
8 |
|
Q 1 |
0.457 |
нет |
0.078 |
0.378 |
0.396 |
Цель
Рис. 9. Траектории траулера "Б. Зайцев" при управлении с формированием управляющего сигнала по двум отклонениям от ЛП
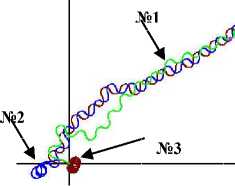
Рис. 10. Траектории траулера "Б. Зайцев" при вариации начальных параметров
В случае с траулером наилучшие результаты даёт вариант № 4, именно он принят за базовый. Вариант № 2 вообще не привёл к выходу на ЛП.
Для обоих судов (танкер, траулер) можно варьировать и другие параметры испытаний. Основные из них – начальные курс и скорость судна. Танкер показал устойчивость процесса выхода на ЛП относительно вариации этих параметров (рис. 5). Траулер и здесь обнаружил особенности своего поведения (рис. 10).
-
5. Выводы
На основании проведенных модельных испытаний с двумя различными типами судов в разных условиях плавания можно сделать следующий принципиальный вывод. Подход швартующегося судна к объекту швартовки, находящемуся, например, на якорной стоянке, разделяется естественным образом на три этапа с разными способами управления швартующимся судном.
Этап 1 . Движение на переменную точку, которая определяется как точка на ЛП, удалённая от цели на заданное расстояние. Его величина определяется из длины тормозного пути при снижении скорости швартующегося судна от ходовой до скорости швартовки. Движение на этом этапе происходит на ходовой скорости. Управление осуществляется по отклонению курса судна от направления на заданную точку.
Этап 2 . Движение вдоль ЛП, которая определяется как линия, параллельная курсу цели и удаленная от цели на заданное расстояние. Скорость на этом этапе уменьшается до скорости швартовки. Управление происходит путем формирования управляющего сигнала как комбинации отклонений носовой и кормовой точек ДП судна от линии прицеливания.
Этап 3 . Подход к борту объекта швартовки. На этом этапе управление судном ведётся вручную, исходя из конкретных обстоятельств швартовки. Автоматизированная швартовка на этом этапе возможна только при наличии соответствующего движительно-рулевого комплекса и датчиков, которые определяют расстояния и скорости точек швартующегося судна до объекта швартовки и индицируют эти данные на мониторе.
В настоящей статье рассмотрено автоматизированное движение только вдоль переменной ЛП. Показана на модели возможность реализации такого движения и рассчитана его эффективность с помощью одного из критериев качества управления.
