Моделирование режима подъема груза поворотного лесопогрузчика с комбинированным манипулятором

Автор: Полетайкин В.Ф.
Журнал: Вестник Красноярского государственного аграрного университета @vestnik-kgau
Рубрика: Техника
Статья в выпуске: 12, 2012 года.
Бесплатный доступ
В статье приводятся результаты математического моделирования режима подъема груза поворотного лесопогрузчика при синхронном вращении стрелы и колонны.
Поворотный лесопогрузчик, режим работы, моделирование
Короткий адрес: https://sciup.org/14082169
IDR: 14082169 | УДК: 630.377.4
Текст научной статьи Моделирование режима подъема груза поворотного лесопогрузчика с комбинированным манипулятором
Лесопогрузчики поворотного типа, оснащенные комбинированными манипуляторами с поворотными в продольно-вертикальной плоскости колоннами опорно-поворотных устройств, находят все более широкое распространение в лесной промышленности. Учитывая это, в Сибирском государственном технологическом университете проводятся работы по созданию и исследованиям рабочих режимов поворотных лесопогрузчиков с целью обоснования основных параметров технологического оборудования. На рисунке 1 показана расчетная схема технологического оборудования поворотного лесопогрузчика с комбинированным манипулятором. Технологическое оборудование состоит из опорно-поворотного устройства 1 , стрелы телескопической, состоящей из наружной 2 , средней 3 и внутренней 4 секций, гидроцилиндров поворота стрелы 5 . На раме базовой машины жестко крепится устройство опорно-поворотное 1 , на котором шарнирно установлена поворотная стойка 10 и гидроцилиндры привода стойки 9 . На стойке также шарнирно закреплены телескопическая трехсекционная стрела и гидроцилиндры подъема стрелы 5. В качестве рабочих органов могут быть использованы: захватно-срезающее устройство – при работе в режиме валочно-трелевочной машины; захват – при работе в режимах лесопогрузчика и машины для бесчокерной трелевки деревьев.
Рис. 1. Расчетная схема лесопогрузчика поворотного типа
Устройство опорно-поворотное 1 является основным несущим элементом конструкции манипулятора. Оно включает в себя корпус с подшипниками скольжения, в которых устанавливается ось в сборе; механизм поворота манипулятора в горизонтальной плоскости 8. Механизм поворота манипулятора в горизонтальной плоскости представляет собой устройство «шестерня-рейка» с приводом от четырех гидроцилиндров одностороннего действия. С помощью гидроцилиндров 9 стойка отклоняется от вертикального положения в обе стороны на угол 35° (общий угол поворота стойки 700), что обеспечивает вылет рабочего органа (с учетом перемещений секций стрелы) 7,5-8 м. Гидропривод лесопогрузчика представляет собой две автономные гидропередачи, работающие по открытым схемам, что позволяет осуществлять совмещение операций при выполнении лесосечных или погрузочных работ (подъем стрелы - выдвижение секций, поворот стрелы -поворот стойки, подъем стрелы - поворот колонны в горизонтальной плоскости и т.д.) и сокращать время на их выполнение. В данной статье рассмотрены результаты моделирования режима подъема жесткого груза (сортиментов) поворотного лесопогрузчика с грузовым моментом 210 кНм при одновременном (синхронном) вращении стрелы и поворотной стойки.
Модель системы «технологическое оборудование – груз»
Уравнения движения системы «технологическое оборудование - груз» поворотного лесопогрузчика в рассматриваемом режиме на предварительных этапах исследований были получены в следующем виде:
т пр . К • L 2 * а + т пр . С . • ОС 2 * « + т пр . с • ОС • L •
-
• ^ Fz-l K rO'cos^ н + ф) -т пр . с - ОС • L* ф2 •
-
• [ ь*ос ] ' sin(ф н + ф^ = р с ' sin а 2 • ^ 9 — ( О пр . к + G ПР . к )lk- cos ar —
-
-2т ПР . с • а • ф • L • L к ■ cos у 1 .
-
-(т пр . С L + А С )ф + т пр . С ’ ОС • “• L • [ L *0 c ] • cos(ф н + ф) =
= Р I sin р-т пр . с gL , (1)
где L К - длина колонны; а - угол поворота колонны; ф - угол поворота стрелы; т ПР . С - масса стрелы и груза, приведенные к точке С; L — длина стрелы; Р , РС - усилия на штоках поворота стрелы и колонны; О пр . К , 0 РР . К - силы тяжести колонны и стрелы, приведенные к точке К; 1 С - момент инерции стрелы; l... l ii -звенья кинематической схемы манипулятора (рис. 1); а, ф - угловые скорости колонны и стрелы; а , ф -угловые ускорения колонны и стрелы.
При обосновании параметров механизмов поворота колонны и подъема стрелы лесопогрузчиков и манипуляторов в качестве критерия оценки результатов моделирования режимов работы и оптимизации параметров механизмов используют усилия на штоках гидроцилиндров привода механизмов. Исходя из этого, преобразуем уравнения (1), разрешив их относительно величин Р С и Р. Математическая модель системы «технологическое оборудование - груз» принимает следующий вид:
Р С = [т ПР.К • L 2 • а + т ПР . С. • ОС 2 • а + т ПР . С • ОС • L • ф [L, L К * L] • С05(ф н + ф) - т ПР . С • ОС • L L L*OC _1
• L • ф2 • [ Lw*L ] • sin( Ф н + ф) + 2т пр . с • а • ф • L • L к 'cos Y i + (0 пр . к + 0 пр . к ) • • LK cos а 1 ] /19 sin а2 ;
Р= [т пр . с L2 + 1 с )ф + т пр . с • ОС • а • L • [^^] • cos( ф н + ф) + + т ПР . с gL] l I sin р .
Условия функционирования системы
Для обеспечения заданных скоростей движения исполнительных механизмов и требуемых усилий на штоках гидроцилиндров должен быть обеспечен баланс расходов рабочей жидкости на исполнительные гидроцилиндры при заданном номинальном давлении в гидросистеме. Данные условия отражены в уравнениях расхода рабочей жидкости:
Qh 1 Кп = -^^ Ф + a vi Р 1 + Кр!
V Н 1 С! 4 sin/? У1 1 Р 1 dt
QН2 Кt2 = 4^2 + аУ2 Р2+ КР2 % где Кu , Кt2 - коэффициенты, учитывающие изменение подачи рабочей жидкости с течением времени;
К р 1 , К р 2 - коэффициенты податливости (жесткости) рабочей жидкости и элементов гидросистемы механизмов подъема стрелы и поворота колонны;
а у1 , а у2 — коэффициенты утечек рабочей жидкости в гидросистемах механизмов поворота стрелы и колонны.
Скорость штока гидроцилиндра определяется по выражению
У шт = 5 _ Н „ „ , ц -^ ( К Н , ц + К ц , н ) р - Ц •£ . (3)
Угловая скорость стрелы
Ф =
S i ^1 + К 2 —2 К cos(p 4 )
lsin(p 4 )
.
Угловое ускорение стрелы
.. _ /5Л2 К Cos2 (p 4 )—(1—K2) cos(p 4 )+K
Ф \l) Sin3 (p 4 )
.
Угловая скорость колонны
S 2 /1+ К 1 —2 К i cos(a+a i ) a = —---------
1 9 sin(a+a i )
.
Угловое ускорение колонны
.. /S 2\ К С i Cos2 (a+a i )—(1— К i )cos(a+a i )+ К 1
,
\lg/ Sin3 (a+a i )
где 51, 52 - скорости поступательного движения штоков гидроцилиндров подъема стрелы и поворота колонны соответственно; К= 1 , К1 _ - параметры кинематической схемы; qн - объемные постоянные насоС С i сов; n - число оборотов вала насоса в минуту; qн _ 0,85 - общий КПД насоса; qц _ 0,92 ...0,98 -общий КПД гидроцилиндра; Кн, Кц, Kv - коэффициенты пропорциональности (Кн = 0,001...0,003, Кц =0.001.. .0,003, Кv = 0,002.0,003); fn — площадь поршня гидроцилиндра. Для комбинированных манипуляторов лесных машин коэффициенты утечек рабочей жидкости а у1 _ а у2 = 1- 10-12.2,5-10 -12 м3/(Па-с).
Коэффициенты податливости рабочей жидкости и элементов гидропривода определены из выражения
К р 1 _ К р 2
10i0 ( Р +1) 0, 45 .
Алгоритм моделирования режима подъема груза при синхронном движении стрелы и колонны
Для выполнения математического моделирования рассматриваемого режима движения груза предварительно была сформирована база данных. В процессе моделирования исследовали влияние на уровень нагрузок на гидроцилиндры привода технологического оборудования параметров кинематической схемы ( ф, а, L, L k , ф, ф, а , а, ОС , l 9 , а2,0,1, у 1 ). Кроме этого, изменяя частоту вращения валов насосов гидросистемы, изменяли скорость движения штоков гидроцилиндров и, следовательно, величину абсолютной скорости точки приведения массы стрелы и груза, угловой скорости и углового ускорения стрелы и колонны.
Моделирование режима подъема груза выполнено в соответствии со следующим алгоритмом:
-
1. Присвоение управляемым переменным начальных значений, определение интервалов варьирования и шагов их дискретизации. Начальные значения параметров: I = 0,65 м ; 1 9 = 1,275 м . Интервалы варьирования: 1- 0,6 < 0,65 < 0,7 м ; 19 - 1,225 < 1,275 < 1,325 м . Шаг дискретизации I- Д1 = 0,05 м. Моделирование режима выполнено при следующих значениях Г. 0,6; 0,65; 0,7 м. Шаг дискретизации 19 = 0,05 м. Моделирование выполнено при 19: 1,225; 1,275; 1,325 м. Интервалы варьирования параметров Ф и а от 0 до 700 ( ф = а ); шаги дискретизации Да = Дф = 50. Количество шагов варьирования данных 700 - „
-
2. Вычисление геометрических параметров кинематической схемы на каждом шаге дискретизации переменных ф , а , I , 19 , а также угловых скоростей и угловых ускорений стрелы и колонны ( ф , ф , а , а ) при переменных значениях частоты вращения валов насосов гидропривода и скоростях движения штоков гидроцилиндров привода стрелы и колонны. Моделирование выполнено при частотах вращения валов насосов 1000, 1200, 1400, 1600 об/мин.
-
3. Вычисление на каждом шаге варьирования переменных числовых значений линейных скоростей относительного и переносного движений, а также абсолютной скорости центра масс груза и приведенных масс технологического оборудования.
-
4. Вычисление на каждом шаге варьирования переменных числовых значений усилий на штоках гидроцилиндров подъема стрелы Р и поворота колонны Р С.
-
5. Анализ полученных результатов и обоснование основных параметров кинематики технологического оборудования.
переменных при моделировании режима п = — = 14.
Анализ результатов моделирования подъема груза при синхронном движении стрелы и колонны
Выполнение моделирования рассматриваемого режима в соответствии с вышеприведенным алгоритмом позволило получить данные о нагрузках на штоки гидроцилиндров привода стрелы и колонны при движении груза из положения набора в транспортное положение и зависимости их от управляемых переменных. Анализ полученных данных показал следующее:
-
1. В процессе синхронного движения колонны и стрелы с грузом на штоки гидроцилиндров привода колонны действуют значительные нагрузки. Их величины при изменении угла α от 0 до 700, скорости движения штока S 2 от 0,042 до 0,0691 м/с и размера I 9 от 1,225 до 1,325 м изменяются от 329114 до 562621 Н. При этом в начальный период движения (а < 200) нагрузки Р с снижаются. При а=200 они становятся минимальными, а далее возрастают до максимальных значений при α = 700.
-
2. Аналогичный характер изменения нагрузок на гидроцилиндры привода стрелы, о чем свидетельствуют диаграммы изменения нагрузок, представленные на рисунке 2. Значения нагрузок Р изменяются от 179844 до 250353 Н. Следует при этом отметить, что нагрузки на гидроцилиндры стрелы изменяются в значительно меньших пределах. Так, нагрузки на гидроцилиндры колонны изменяются от Р СMIN =321593 H до Р СMAX =481098 Н (при n=1600 об/мин, l=0,65 м, l 9 =1,275 м), или на 49,5%. Нагрузки на гидроцилиндры стрелы изменяются при тех же условиях от Р MIN =188784 Н до Р MAX =228459 H, или на 21%, что отчетливо видно на рисунке 2.
Нагрузки на гидроцилиндры ,Н n=1600 об/мин, l=0,65 м, l9=1,275м
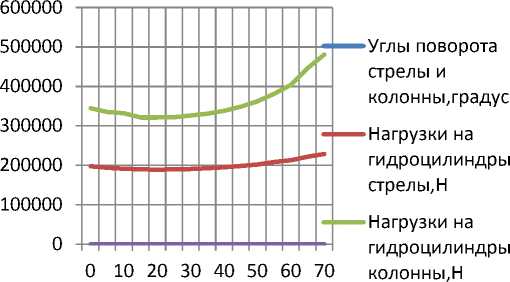
Углы поворота стрелы и колонны
Рис. 2. Диаграммы изменения нагрузок на гидроцилиндры
-
3. Данные показывают, что увеличение скорости движения штоков гидроцилиндров не сопровождается пропорциональным увеличением нагрузок. При увеличении скорости S 2 от 0,042 до 0,0691 м/с (на 64,5%) нагрузка Р С возрастает от 476228 до 481098 Н, т.е. на 4870 Н, или на 1% (при l 9 =1,275м). Увеличение скорости штока гидроцилиндра привода стрелы также не приводит к пропорциональному возрастанию нагрузок Р: при увеличении скорости S 1 от 0,0364 до 0,0585 м/с (на 60,7%) нагрузки Р практически не возрастают.
-
4. В начальный период движения колонны ( а < 20 0 ) при увеличении размера I 9 нагрузки Р с возрастают. Так, при увеличении размера l 9 от 1,225 до 1,325 м (на 8,16%) нагрузки возрастают от 329537 до 370839 Н, или на 12,5%. В пределах угла α от 00 до 20…230 нагрузки Р С постепенно снижаются, а далее возрастают до набольших значений при α=700 (рис. 3). При этом при уменьшении размера l 9 нагрузки Р С возрастают. Так, при α=700 l 9 =1,225 м Р С =562621 Н; при l 9 =1,275 м Р С =481098 Н; при l 9 –1,325 м Р С =430826 Н. Таким образом, увеличение размера l 9 от 1,225 до 1,325 м (на 8,16%) обеспечивает снижение нагрузки на колонну Р С на 23,43%. Однако при этом возникает необходимость увеличения хода гидроцилиндра, так как при увеличении размера l 9 при постоянном размере хода уменьшается угол поворота колонны. Анализ данных показывает, что оптимальным является размер l 9 =1,275 м.
Нагрузки на гидроцилиндры привода колонны,Н n=1600 об/мин

Ё*!!!!!”:~^Ш
Угол поворота колонныα l9=1,225м
0 10 20 30 40 50 60 70
l9=1,275м
Угол поворота колонны α, градус
Рис. 3. Нагрузки на гидроцилиндры колонны при варьировании размера l 9
Данные моделирования показывают, что при увеличении размера l нагрузки на штоки гидроцилиндров поворота стрелы снижаются при любом положении стрелы и значении скорости движения штока (частоты вращения вала насоса). Так, при увеличении l от 0,6 до 0,7 м (на 16,66%) при φ =700 нагрузки Р снижаются от 250353 до 210856 Н, или на15,78 %, т.е наблюдается пропорциональное снижение нагрузок во всем интервале вращения стрелы (00 ≤φ≤700) (рис. 4). Однако при увеличении размера l для обеспечения требуемого угла поворота стрелы необходимо увеличивать ход штока гидроцилиндра поворота стрелы, что ограничивается условиями компоновки технологического оборудования. Анализ данных показывает, что по условиям компоновки и нагруженности технологического оборудования оптимальной величиной является l =0,65 м.
Нагрузки на гидроцилиндры привода стрелы,Н n=1600 об/мин
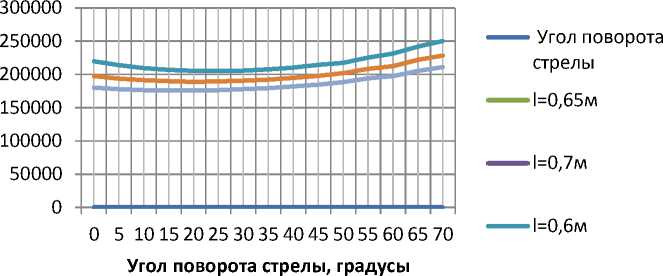
Рис. 4. Нагрузки на гидроцилиндры стрелы при варьировании размера l
