Моделирование режима упора асинхронизированного вентильного двигателя с питанием от инвертора напряжения

Автор: Юшков Игорь Сергеевич
Журнал: Вестник Южно-Уральского государственного университета. Серия: Энергетика @vestnik-susu-power
Рубрика: Электромеханические системы
Статья в выпуске: 3 т.20, 2020 года.
Бесплатный доступ
Представлены результаты математического моделирования работы бездатчиковой системы управления электропривода на базе зависимого инвертора напряжения с управлением по фазе тока и фазовой автоподстройкой частоты при питании асинхронизированного вентильного электродвигателя в режиме упора. В статье представлена разработанная модель данного электропривода в системе математического моделирования MATLAB. Модель преобразователя частоты возбуждения, которая поддерживает номинальное значение тока ротора и постоянную частоту возбуждения 15 Гц. Со стороны статора (якоря) преобразователь частоты синхронизируется по фазе тока с применением блока автоподстройки частоты и задает угол сдвига фаз между током и напряжением якоря. Представлена базовая система уравнений, описывающая режимы работы асинхронизированного вентильного двигателя, а также выражение электромагнитного момента в режиме упора. Показан электромагнитный момент на валу двигателя получившийся в результате математического моделирования режима упора асинхронизированного вентильного двигателя при номинальных токах, частоте ротора 15 Гц при этом сдвиг фаз между током и напряжением якоря составляет 20 электрических градусов.
Модель, асинхронизированный вентильный двигатель, упор, управление, электропривод, режим упора
Короткий адрес: https://sciup.org/147232766
IDR: 147232766 | УДК: 621.313 | DOI: 10.14529/power200313
Stop mode simulation for an asynchronized vent motor fed by a voltage inverter
The paper presents the results of mathematical modeling of a sensorless electric drive control system operation. This system is based on a dependent voltage inverter with current phase control and phase-locked loop frequency control and feeds an asynchronous valve motor in the stop mode. The article presents the developed model of this electric drive in the MATLAB mathematical modeling system. The model features an excitation frequency converter, that maintains a nominal rotor current and a constant excitation frequency of 15 Hz. From the stator (armature) side, the frequency converter is synchronized in phase with the current using an automatic frequency control unit and sets the phase angle between the current and the armature voltage. The paper presents a basic system of equations that describes the modes of operation of an asynchronized valve motor, as well as the expression of the electromagnetic moment in the stop mode. It shows the electromagnetic torque on the motor shaft, which was obtained as a result of mathematical modeling of the thrust mode of an asynchronized valve motor at rated currents, the rotor frequency of 15 Hz, with 20 electrical degrees phase shift between the current and the armature voltage.
Текст научной статьи Моделирование режима упора асинхронизированного вентильного двигателя с питанием от инвертора напряжения
На сегодняшний день в развитии электропривода очень важным является вопрос использования бездатчиковых систем управления. Современные бездатчиковые системы управления применяют математическую модель привода, которая просчитывается в микроконтроллере системы управления во время работы [1]. Для корректной работы требуются точная настройка, знание всех параметров машины и высокая вычислительная способность микроконтроллера [2]. Большим недостатком таковых систем является тот факт, что до начала вращения невозможно получить показатели, правильно ориентирующие координаты статора и ротора относительно друг друга [3]. И поэтому пуск таких систем является затрудненным.
Рис. 1. Структурная схема АВД
Указанных недостатков лишен электропривод двойного питания на базе асинхронизированного вентильного двигателя (АВД) с системой управления без датчиков положения ротора (рис. 1) [4].
Машинно-вентильный комплекс АВД состоит из асинхронной машины, питающейся от двух преобразователей частоты. Машина может быть подключена по схеме возбуждение – ротор, якорь – статор и наоборот. При питании по первой схеме обмотка ротора питается от преобразователя частоты на базе инвертора напряжения, основная задача которого – создать магнитное поле, намагничивая машину. Со стороны возбуждения регулируется частота и действующее значение напряжения, что позволяет управлять величиной тока, а соответственно и магнитным потоком. Главная отличительная особенность заключается в том, что магнитное поле вращается еще до пуска двигателя. Другая обмотка называется якорем и питается от преобразователя частоты синхронизированного по фазе тока. Со стороны якоря регулируется сдвиг фаз между током и напряжением и действующее значение напряжения. Этот преобразователь частоты синхронизируется по фазе и частоте якоря и при увеличении частоты вращения ротора, выходная частота увеличивается на круговую частоту ротора с учетом числа пар полюсов. Двойное питание со стороны статора и ротора допускает управление энергетическими показателями и позволяет управлять механическими характеристиками привода [4, 5].
Режим упора может возникать при образовании наледи на приводных механизмах. Есть облас-
Моделирование режима упора асинхронизированного вентильного двигателя с питанием от инвертора напряжения ти применения электропривода, когда необходимо создать момент на валу двигателя при нулевой скорости. Основным принципом работы системы управления электроприводом в режиме упора является синхронизация напряжения преобразователя якоря по фазе и частоте с током якоря. Учитывая то, что частота возбуждения изменяется, требуется обеспечение регулировки сдвига фаз между током и напряжением якоря на любой частоте с целью управления электроприводом [6].
Основная цель данной работы заключается в анализе пускового момента на валу АВД при работе в режиме упора с поддержанием тока возбуждения на номинальном уровне. Для этого необходимо решить следующие задачи:
-
1. Разработать математическую и имитационную модель для исследования режима упора АВД.
-
2. На основе базовой системы уравнений вывести выражение момента в функции частоты тока якоря для режима упора.
-
3. Провести анализ момента на валу двигателя в режиме упора.
Основная часть
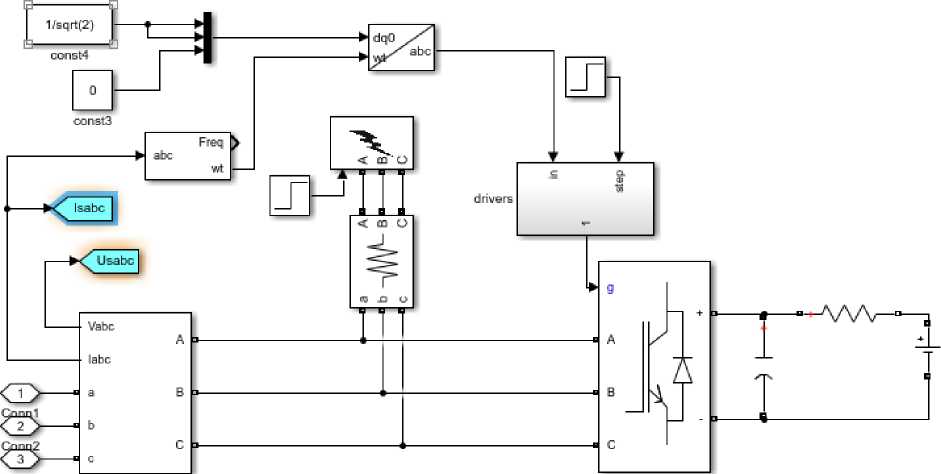
В ходе систематического исследования режима упора АВД была разработана математическая модель в интерактивной системе Matrix Laboratory (рис. 2).
Управление инверторным звеном якоря возможно при условии синхронизации по фазе тока и применения узла автоподстройки фазы и частоты (рис. 3).
Для обеспечения пуска привода особенную трудность вызывает необходимость синхронизации по фазе тока якоря при неподвижной машине. Для этого необходимо создать контур для протекания тока перед пуском двигателя [4]. Этот предпусковой ток должен позволять системе управления осуществить привязку напряжения к фазе тока с возможностью регулировки и иметь небольшую амплитуду, чтобы двигатель не начал вращаться в режиме асинхронного двигателя с короткозамкнутым ротором, но достаточную, чтобы намагнитить машину. Эту функцию обеспечивает система управления преобразователем частоты возбуждения
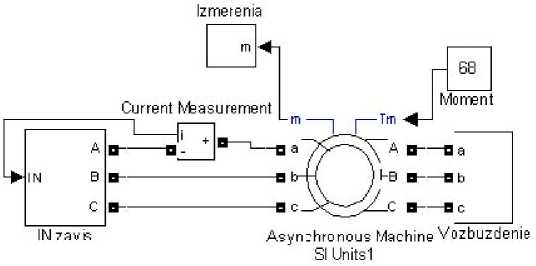
Рис. 2. Модель АВД
СоппЗ
Рис. 3. Модель преобразователя частоты якоря
Электромеханические системы
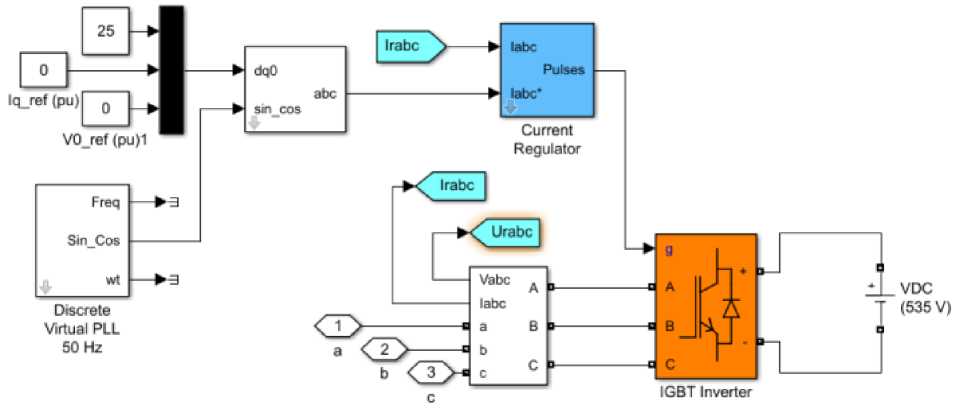
Рис. 4. Модель преобразователя частоты возбуждения
(рис. 4). В цепи возбуждения стоит регулятор тока, который создает начальное намагничивание машины и регулирует ток возбуждения, не давая превысить номинальные значения.
Базовая система комплексных уравнений, описывающая режимы работы АВД, записывается как:
• • •
и = (r + j-V-x o)- I + j-v-Y,
Uf = (rf + j - 50 - xf ) - If + j - 50 -Y,
Y = x - (I + If ),
••
M = Re j -Y-1, где Y - обобщенный вектор потокосцепления;
U , U f – обобщенные векторы напряжений якоря и возбуждения; r , rf – активное сопротивление обмоток якоря и возбуждения; x, xаf - индуктивности обмоток якоря и возбуждения; v, 50 -относительная частота токов якоря и возбуждения; xа , xf , xar - индуктивности рассеяния обмоток якоря и возбуждения, а также их взаимоиндуктив-ность; I , I f – обобщенные векторы токов якоря и возбуждения; M – электромагнитный момент на валу двигателя.
Параметры Т-образной схемы замещения модели двигателя соответствуют марке асинхронного двигателя 4AK160M4Y3 производства Ярославского электромашиностроительного завода; они следующие: х = 1,090147, x f = 1,105783, х а = 0,066424, x af = 0,08206, х ar = 1,023723, r f = 0,048664. Согласно паспортным данным, номинальный момент двигателя равен 86 Нм.
Решая систему уравнений (1) относительно момента на валу, можно добиться решения, в котором отсутствует ток якоря и потокосцепление:
r sin ф- sin 0 + xav cos ф- sin 0) cos (ф+ v( r sin (ф + 0) + v xa cos (ф + 0))2
U 2 ( M =-
-. (2)
Здесь ф - угол между обобщенными векторами тока и напряжения якоря; 0 - угол между обратным обобщенным вектором ЭДС якоря и обоб- щенным вектором напряжения якоря – угол нагрузки [3].
При допущении, что r ~ 0 , выражение для электромагнитного момента записывается как
M =
U2 cos ф- sin 0 v2 xст cos (ф + 0)
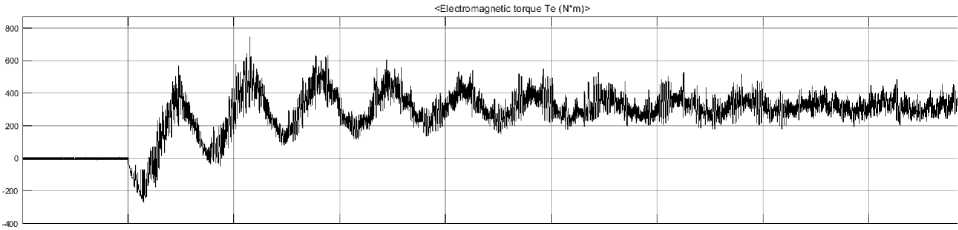
Рис. 5. Электромагнитный момент двигателя в режиме упора
Моделирование режима упора асинхронизированного вентильного двигателя с питанием от инвертора напряжения
Видим, что момент прямо пропорционален квадрату напряжения якоря и обратно пропорционален квадрату относительной частоты тока якоря, а при режиме упора это фактически частота возбуждения. Соответственно, чем меньше частота возбуждения, тем больше момент на валу.
В результате математического моделирования получена временная зависимость вращающегося момента на валу двигателя в режиме упора (рис. 5). На изображении видно, что после подачи напряжения на инвертор напряжения якоря начинает увеличиваться вращающий момент двигателя. Колебания электромагнитного вращающего момента объясняются отсутствием жесткой ориентации векторов тока и потокосцепления, одновременно с этим жесткой фиксацией тока и напряжения якоря на фиксированный угол сдвига фаз.
Выводы
Полученные в результате математического моделирования значения момента на валу в режиме упора достигают троекратной величины, а в пиках достигают 6 крат. При этом токи и напряжения не превышают номинальных значений. Учитывая, что коммутации в силовых вентилях осуществляются с частотой возбуждения, то тепловой режим работы вентилей будет благоприятным и в данном режиме двигатель может работать не ограниченное по длительности время.
На основании проведенных исследований режима упора АВД от инвертора напряжения с синхронизацией по току якоря на имитационной модели можно сделать вывод, что применение АВД может быть осуществлено в тяжелых условиях пуска при управлении двигателем с поддержанием тока возбуждения.
Список литературы Моделирование режима упора асинхронизированного вентильного двигателя с питанием от инвертора напряжения
- Holtz, J. Sensorless Control of induction Motor Drives / J. Holtz // Proceedings of the IEEE. - 2002. - Vol. 90, no. 8. - P. 1359-1394. DOI: 10.1109/jproc.2002.800726
- Sensorless speed observer based on third-order spatial field harmonic for multiphase induction motor drives / M. Mengoni, L. Zarri, A. Tani et al. // IEEE Symposium on Sensorless Control for Electrical Drives (SLED). - 2016. - P. 1-6. DOI: 10.1109/sled.2016.7518792
- Bobrov, M. Flux estimation algorithms for double-fed induction motor drive field-oriented / M. Bobrov, G. Tutaev // 2018 10th International Conference on Electrical Power Drive Systems, ICEPDS 2018 - Conference Proceedings 10. - 2018. - P. 8571818. DOI: 10.1109/icepds.2018.8571818
- Гуляев, И.В. Асинхронизированный вентильный двигатель с управлением по фазе тока / И.В. Гуляев, И.С. Юшков. - Saarbruecken: LAP LAMBERT Academic Publishing GmbH and Co. KG, 2011. - 183 c.
- Асинхронизированный вентильный двигатель с поддержанием неизменного результирующего магнитного потока / И.П. Копылов, Ю.П. Сонин, И.В. Гуляев, Г.М. Тутаев // Электротехника. - 2000. - № 8. - С. 59-62.
- Юшков, И.С. Векторная диаграмма асинхронизированного вентильного двигателя при питании от инвертора напряжения / И.С. Юшков // Известия высших учебных заведений. Электромеханика. - 2015. - № 6 (542). - С. 54-58.
