Моделирование режимов параллельной работы квазирезонансных преобразователей напряжения с коммутацией ключевых элементов при нулевых значениях тока

Автор: Горяшин Н.Н., Лукьяненко М.В., Соломатова А.А., Хорошко А.Ю.
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Математика, механика, информатика
Статья в выпуске: 4 (25), 2009 года.
Бесплатный доступ
Представлены результаты имитационного моделирования параллельной работы квазирезонансных преобразователей напряжения с коммутацией электронных ключей при нулевых значениях тока, работающих в цепи стабилизатора напряжения с общим контуром регулирования посредством частотно-импульсной модуляции.
Квазирезонансный преобразователь напряжения, электронный ключ, частотно-импульсная модуляция, удельная мощность, динамическое токовыравнивание
Короткий адрес: https://sciup.org/148176051
IDR: 148176051 | УДК: У
Modeling of parallel operation of zero-current switching quasi-resonant converters
P-spice simulation results of two zero-current switching quasi-resonant converters operation with parallel connection in closed loop controlled voltage regulator under frequency control are presented.
Текст краткого сообщения Моделирование режимов параллельной работы квазирезонансных преобразователей напряжения с коммутацией ключевых элементов при нулевых значениях тока
Современные системы электроснабжения (СЭС) космических аппаратов (КА) являются сложным комплексом, включающим источники электроэнергии, преобразующие и распределительные устройства, объединенные в систему автоматического регулирования и предназначенные для питания бортовых нагрузок. Вторичные источники электропитания представляют собой энергопреобразующий комплекс, состоящий из N идентичных импульсных преобразователей напряжения (ИПН), работающих на общую нагрузку. В традиционном варианте в качестве ИПН используются классические преобразователи с прямоугольной формой тока и напряжения ключевого элемента (КЭ) и управлением посредством широтно-импульсной модуляции (ШИМ). Параллельная работа таких ИПН в режиме стабилизации напряжения может быть организована за счет фазового разделения управляющих импульсов ключевых элементов, работающих на общую нагрузку, с динамическим токовыравнивани-ем, что предполагает введение дополнительных контуров управления. Фазовый сдвиг между соседними управля- ющими импульсами задается по условию ϕ = 2π/N, где N – количество параллельных ячеек ИПН [1; 2].
Использование в рассматриваемых системах квази-резонансных преобразователей напряжения (ПН) [3–9] может быть связано с необходимостью повышения технико-экономических показателей СЭС КА, таких как удельная мощность, КПД, электромагнитная совместимость. В публикациях, посвященных преобразователям напряжения с резонансными режимами работы КЭ, вопросы параллельной работы данного типа ПН исследуется лишь в небольшой степени, чего явно не достаточно для их практической реализации.
Далее мы будем рассматривать режимы работы двух параллельно включенных квазирезонансных преобразователей напряжения последовательного типа с коммутацией электронного ключа при нулевых значениях тока (ПНТ) и частотно-импульсным законом регулирования [4; 5; 7; 9].
В упрощенной схеме ПНТ-преобразователя, представленной на рис. 1, выходной фильтр и нагрузка заменены стабилизатором тока, а электронный ключ и элементы резонансного контура (РК) объединены общим названием – резонансный ключевой элемент (выделен пунктиром).
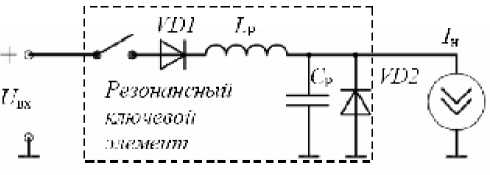
Рис. 1. Идеализированная схема ПНТ-преобразователя
Для дальнейшего анализа, считая все элементы силовой части идеальными, определим передаточный коэффициент резонансного КЭ ПНТ-преобразователя, в качестве которого принимается величина UC р / U вх, где U вх – входное напряжение; UC р – усредненное по времени значение напряжения на конденсаторе РК, равное выходному напряжению в установившемся режиме. Тогда справедливо выражение
T
U C р = - J U C р ( t) dt . (1)
Tt 0
В соответствии с временными интервалами, определенными на рис. 2, и их аналитическими выражениями, приведенными в [7; 10], формула (1) может быть выражена через параметры исследуемого преобразователя:
U = вх j« x
C р 2n- f о
IZ п+ н - + arcsm
U вх

U вх
2- 1 7
2 I н Z
где f п – частота преобразования; f 0– собственная частота РК.
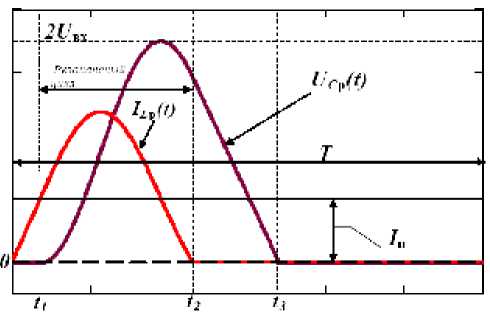
Рис. 2. Диаграммы тока и напряжения в РК за один резонансный цикл работы ПНТ-преобразователя
Отсюда можно выразить коэффициент передачи по напряжению ПНТ-преобразователя с учетом регулировочной характеристики, определяемой отношением частоты преобразования f п к собственной частоте РК f 0 для установившегося режима:
K U
UC р _ L ± x и вх f 0 2n
IZ» f IZ п + -н—- + arcsm —-
UU вхвх
U вх
2 • I Z.
н
Из (3) можно получить статический нелинейный коэффициент передачи по напряжению, зависящий от среднего тока дросселя IL ф, равного току нагрузки в установившемся режиме при прочих определенных параметрах:
K (IL ф ) =X
2п
/ Z
Lф 0
-----+ arcsm
U вх
U вх
x
U вх
2-7 7
2 I L ф Z 0
IL ф Z 0 U вх
.
Проанализируем функцию (3) при работе рассматриваемого ПН в режиме стабилизации выходного напряжения. Допустим, что в некоторый момент времени произошло изменение тока нагрузки в сторону увеличения, в результате чего коэффициент передачи уменьшился. В случае же уменьшения тока нагрузки этот коэффициент, наоборот, будет возрастать. Таким образом, по своей сущности это не что иное, как отрицательная обратная связь по току дросселя выходного фильтра, равного току нагрузки в установившемся режиме. Этот эффект обусловлен тем, что после запирания КЭ в каждом цикле коммутации емкость РК имеет некоторый заряд, время рассасывания которого ( t 3 – t 2) определяется средним током дросселя фильтра (см. рис. 2). Отсюда можно предположить, что параллельное соединение ячеек ПНТ-пре-образователей будет соответствовать параллельному соединению резонансного контура, в котором распределение токов разряда емкостей РК будет определяться волновым сопротивлением Z 0 каждого из РК. Это сопротивление в свою очередь будет иметь обратную зависимость по отношению к среднему значению тока, протекающего через индуктивность выходного фильтра соответствующей ячейки ПН при прочих фиксированных параметрах ( f 0, U вх).
Используя функцию (4), проиллюстрируем ее изменение при разных значениях волнового сопротивления РК, соответствующих параллельному соединению идентичных ячеек ПНТ-преобразователей (рис. 3).
Для организации параллельной работы ПНТ-преоб-разователей в цепи стабилизатора напряжения (СН) предлагается вариант, функциональная схема которого приведена на рис. 4. Здесь сигнал ошибки (рассогласования) поступает на вход генератора, управляемого напряжением (ГУН), частота которого является регулирующей переменной для всех ячеек преобразователей. Далее сигнал разделяется на некоторое количество фаз, равное количеству ячеек ПН с равными интервалами. В данном случае длительность импульса, поступающего на управ- ляющий вход каждой ячейки ПН, не имеет значения. Задача ГУН в совокупности с фазорасщепляющим устройством состоит в том, чтобы формировать моменты времени возбуждения резонансного контура, а формирование моментов времени открытого состояния КЭ, которое нелинейно зависит от тока нагрузки, берет на себя устройство слежения за режимом для каждой ячейки (контроль ПНТ на рис. 4). Для равномерного распределения мощности между ячейками, имеющими разброс параметров, в режиме стабилизации напряжения дополнительных мероприятий по токовыравниванию не требуется, так как в отличие от классических ИПН с ШИМ в нагрузку передается энергия, накопленная в резонансном контуре, который имеет относительно большое внутреннее сопротивление. Таким образом, разделение фаз управляющих сигналов преследует только одну цель – снижение уровня пульсаций выходного напряжения по аналогии с многофазными цепями синусоидального тока.
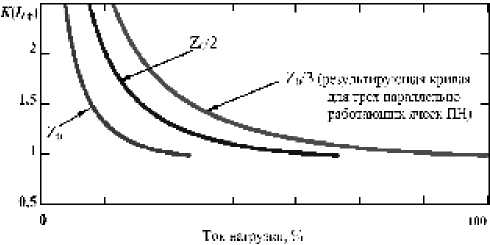
Рис. 3. Семейство характеристик, показывающих изменение нелинейного коэффициента передачи ПНТ-преобразователя от тока нагрузки при разных значениях волнового сопротивления Z 0
Для обеспечения динамической устойчивости в качестве узла коррекции использовалось интегрально-диффе-ренцирующее звено, параметры которого рассчитаны для малосигнальной модели ПНТ-преобразователя [10] известными частотными методами.
В случае параллельно включенных ячеек данных ПН структура и общая передаточная функция силовой части сохраняются, меняются лишь параметры выходного фильтра и волнового сопротивления РК, которые в результате сводятся к некоторым приведенным значениям. Для волнового сопротивления при условии идентичности ячеек ПН справедливо соотношение, полученное из закона Ома: Z sum= Z 0/ N , где N – количество ячеек ПН. При параллельном соединении ПН непрерывную часть можно представить как параллельное соединение выходных LC- фильтров, тогда суммарное значение постоянной времени остается равным постоянной времени LC -фильтра одной ячейки ПН, но при условии идентичности L- и C -компонентов ячеек между собой. При различных параметрах компонентов выходных фильтров параллельно работающих ПН применяются известные законы расчета параллельно соединенных индуктивностей и емкостей. Используя линеаризованную (малосигнальную) модель ПНТ-преобразователя, описанную в [9], передаточную функцию (ПФ) силовой части можно представить как
W ( s ) =
K ( 1 0 ) K r
K r C ф Ls 2 + K r X
X
L *
/ + C ф ( R кв + KU ст )
R Н
s + 1
где
K R
R н
R + ( R „ + KU, )’ нэкв i ст
Для исследования режимов рассматриваемой системы и проверки изложенных выше предположений был выбран формат P-Spice, используемый пакетом программ схемотехнического моделирования MicroCap 7 [11]. В этом пакете была построена схема модели двух параллельно включенных ПНТ-преобра-зователей в формате P-Spice, в которой реализованы все функциональные узлы в соответствии со структурой, определенной на рис. 4. Также были приняты следующие параметры:
-
– номинальное (среднее) значение выходного напряжения U вых = 27 В;
-
– минимальное входное напряжение U вх = 60 В;
-
– максимальный ток нагрузки одной ячейки I нmax = 8,5 А ( R нmin = 3 Ом);
-
– амплитуда пульсаций напряжения на нагрузке относительно номинального значения – не более 0,1 %;
-
– максимальная частота преобразования f п = 440 кГц.
Параметры РК для одной ячейки рассчитывались исходя из условий
0 < Z0ImaxUmin < 1, ALф < 21min, где Imax, Imin – максимальный и минимальный токи нагрузки соответственно; Umin – минимальное входное напряжение; AILф - размах пульсаций тока дросселя выходного фильтра.
K = - — K (I*) = iн дI
Z * 1
Z 0 1
2 n U„ 2
V
1+
\
V
здесь Z0*, Cф*, Lф* – приведенные значения волнового сопротивления, емкости и индуктивности выходного фильтра для N параллельно включенных ячеек ПНТ-преобра-зователей соответственно; Iн* – общий ток нагрузки; Uст – напряжение стабилизации, равное Uвых в установившемся режиме; Rэкв – сопротивление, эквивалентное активным потерям в силовой части ПНТ-преобразователя (в случае параллельной работы ПН Rэкв рассчитывается исходя из суммарных потерь мощности). Величина коэффициента K(I0) определяется соответствующим значением функции (4), где I0 – ток нагрузки в установившемся режиме, в окрестности значения которого линеаризуется система СН.
Так как передаточная функцию (5) является классическим колебательным звеном, то относительный коэффициент демпфирования будет иметь вид f L* )
/+ C * ( R эк. + KU ст )
V R н V
5 = KU

Исходя из формулы (6), можно отметить, что параметр ^ определяется током нагрузки, приведенным волновым сопротивлением РК, а также соотношением индуктивной и емкостной составляющих параметров выходного фильтра (рис. 5): с увеличением параллельных ПН, работающих на общую нагрузку, значение параметра ^ возрастает, что повышает запас устойчивости в области малых токов нагрузки.
Таким образом, здесь можно применить методы расчета параметров коррекции по аналогии с СН, построенным на базе одной ячейки ПНТ-преобразователя, где за расчетное значение коэффициента разомкнутого контура берется точка, соответствующая максимальному заданному току нагрузки на результирующей кривой нелинейного коэффициента передачи согласно формуле (4) (см. рис. 3).
Проведем анализ СН на базе двух параллельно работающих ПНТ-преобразователей со сдвигом фаз сигналов управления КЭ на 180 и 0° с определенными выше характеристиками. Параметры элементов данного СН рассчитывались на основании источников [1-11], в том числе авторских, и предположений, изложенных выше.
Временные диаграммы работы РК каждого из двух параллельно включенных ПНТ-преобразователей со следующим разбросом параметров РК: для ПН1 C = 35 нФ,
L р1 = 0,75 мкГн, Z01 =4,629; для ПН2 С р 2=30 нФ, L p2= 0,8 мкГн, Z )2= 5,164 - показывают, что разница между параметрами РК отражается на запасаемой в нем энергии внутри одного цикла коммутации, а следовательно, и на части, передаваемой в нагрузку мощности одной ячейкой (рис. 6, 7).
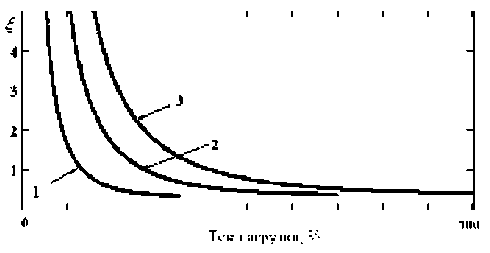
Рис. 5. Семейство характеристик, показывающих изменение коэффициента демпфирования ПНТ-преобразователя от тока нагрузки для одной ячейки (кривая 1), двух параллельно включенных ячеек (кривая 2) и трех ячеек (кривая 3) из расчета, что значение 100 % на оси абсцисс - это ток нагрузки для трех ячеек ПНТ-преобразователей
Значения токов через каждую ячейку при указанном выше разбросе параметров РК в зависимости от общего тока нагрузки приведены в таблице:
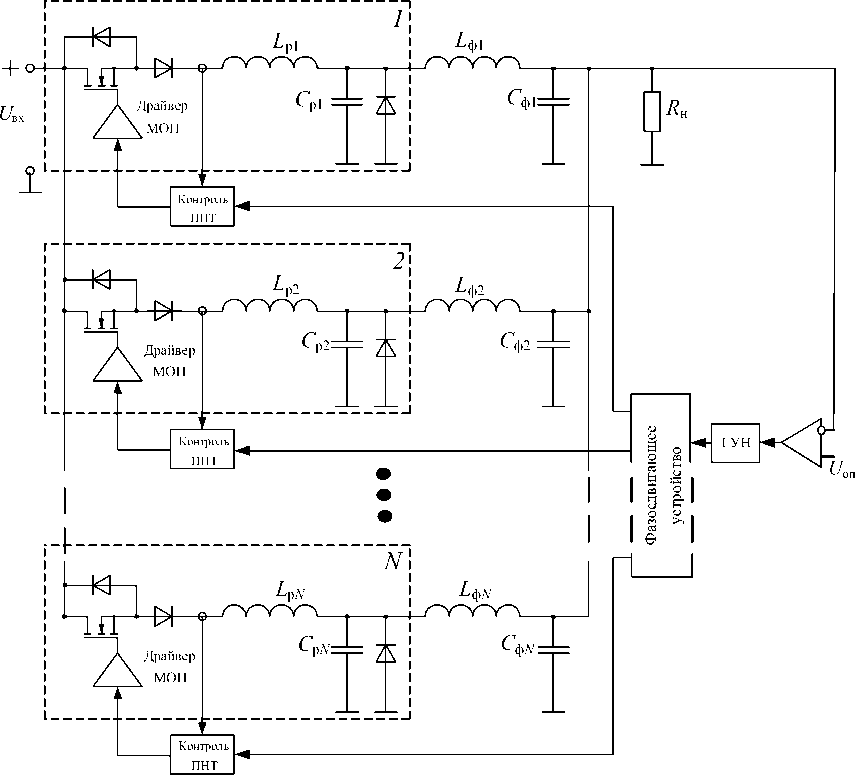
Рис. 4. Функциональная схема стабилизатора напряжения на базе параллельно включенных ПНТ-преобразователей: ГУН - генератор, управляемый напряжением
|
Ток нагрузки, A |
Z 0 I н/ U вх |
Z 0 , Ω |
f 0 , МГц |
||||||
|
Общий |
ПН1 |
ПН2 |
ПН1 |
ПН2 |
ПН1 |
ПН2 |
Общее |
ПН1 |
ПН2 |
|
8,796 |
4,81 |
3,986 |
0,371 |
0,343 |
4,629 |
5,164 |
2,441 |
0,982 3 |
1,027 |
|
13,175 |
7,28 |
5,895 |
0,562 |
0,507 |
|||||
|
17,494 |
9,826 |
7,668 |
0,758 |
0,66 |
|||||
Анализ этих результатов приводит к выводу, что распределение средней мощности, передаваемой в нагрузку, между ячейками данных ПН при параллельной работе зависит только от параметров РК при прочих определенных условиях и не зависит от сдвига фаз между управляющими импульсами КЭ. Разброс параметров РК был задан, исходя из наихудшего случая с точки зрения неравномерности распределения токов между ячейками ПН (больше 5 %). На практике компоненты РК могут быть заданы с разбросом менее 5 %, что приводит к лучшему токовыравниванию.
Если принимать во внимание зависимость внутреннего сопротивления ПНТ-преобразователя от режимов работы, т. е. от входного напряжения и тока нагрузки, то в общем случае можно сказать, что характер распределения токов для каждой ячейки определяется соотношением параметра Z0Iн/Uвх между параллельными ячейками рассматриваемых ПН: чем Z0*Iн*/Uвх ближе к единице, тем сильнее влияние разброса параметров РК на токовырав-нивание между ячейками.
Таким образом, использование ПНТ-преобразовате-лей в блочно-модульных схемах энергопреобразующей аппаратуры СЭС КА обеспечивает их корректную работу при параллельном соединении без введения дополнительной системы динамического токовыравнивания. Это в свою очередь повышает надежность систем данного типа, так как в случае выхода из строя одного модуля преобразуемая мощность автоматически распределится между оставшимися работающими ячейками ПН в соответствии с разбросом параметров РК. Варьирование параметров РК позволяет искусственно задавать, какую часть мощности одна отдельно взятая ячейка ПНТ-преобразователя должна отдавать в нагрузку в случае, если необходимо
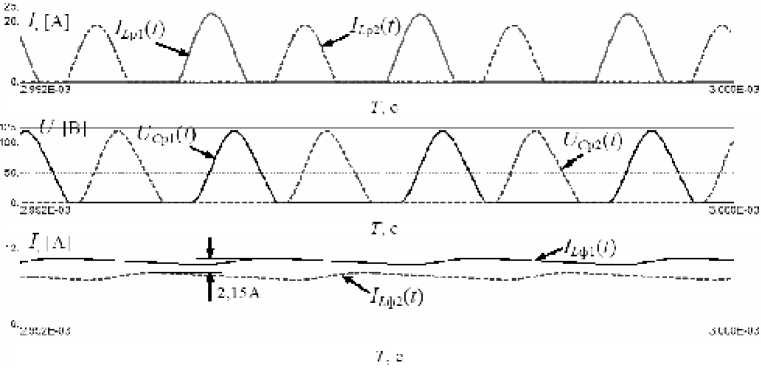
Рис. 6. Временные диаграммы сигналов в силовых цепях двух параллельно включенных ПНТ-преобразователей с разделением фаз управляющих сигналов КЭ на 180 ° для ПН1 (сплошная линия) и ПН2 (пунктирная линия)
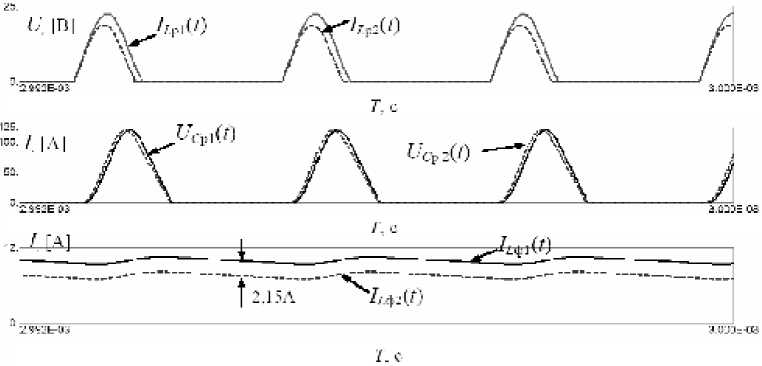
Рис. 7. Временные диаграммы сигналов в силовых цепях двух параллельно включенных ПНТ-преобразователей без разделения фаз управляющих сигналов КЭ
неравномерное распределение токов между модулями ПН в энергопреобразующем устройстве. В связи с тем что исследуемый тип квазирезонансного преобразователя имеет ограничение по диапазону рабочих токов нагрузки, для его расширения при сохранении высоких показателей по удельной мощности рекомендуется использовать выходной фильтр с нелинейной индуктивностью [9].
