Моделирование систем управления машин дорожно-строительного комплекса

Автор: Емельянов Рюрик Тимофеевич, Прокопьев Андрей Петрович, Климов Алексей Сергеевич, Сорокин Дмитрий Игоревич
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Технологические процессы и материалы
Статья в выпуске: 3 (24), 2009 года.
Бесплатный доступ
Рассмотрена разработка системы адаптивного автоматического управления уплотняющим рабочим органом. Предлагается алгоритм программного управления рабочим органом асфальтоукладчика. Представлены схемы Simulink-моделей основных элементов подсистемы уплотняющего оборудования асфальтоукладчика. Приводится реализация алгоритма управления на основе программной системы MATLAB&Simulink и результаты моделирования.
Асфальтоукладчик, трамбующие брусья, тензодатчики, подсистема matlab&simulink
Короткий адрес: https://sciup.org/148175969
IDR: 148175969 | УДК: 625.084/085:625.855.3
Simulation control system by machines of road building complex
This paper is devoted to the development of the adaptive automatic control by sealing body. The algorithm program control body of asphalt laying machine. A scheme Simulink-models of the main elements of the seal subsystem equipment of asphalt laying machine. An implementation of the algorithm-based control software system MATLAB & Simulink and simulation results are given.
Текст научной статьи Моделирование систем управления машин дорожно-строительного комплекса
Современное развитие техники и технологий определяет высокие требования к системам управления. Методы совершенствования качества и надежности функционирования управляемых систем в значительной степени определяются используемыми математическими методами и моделями. Это особенно проявляется в работающих дорожно-строительных машинах, динамическое поведение контролируемых параметров которых носит нелинейный характер. Построение моделей, адекватных динамическому поведению, определяет проектирование качественных и надежных систем автоматического управления.
Асфальтоукладчик – центральная машина дорожностроительного комплекса. Он обеспечивает укладку, профилирование и предварительное уплотнение слоя асфальтобетонной смеси. Современные асфальтоукладчики оснащены системами автоматического управления рабочего оборудования, обеспечивающими заданную ровность и угол наклона дорожного полотна. Однако качество дорожного покрытия в значительной сте- пени определяется коэффициентом уплотнения асфальтобетонной смеси, зависящим от неоднородности толщины укладываемой смеси асфальтобетона и жесткости конструкции уплотняющего оборудования. В процессе уплотнения необходимо обеспечивать управление рабочим органом по степени уплотнения асфальтобетонной смеси. Эффективность автоматического управления рабочими процессами можно повысить за счет создания адаптивных систем управления, параметры которых подстраиваются под изменяющиеся условия рабочих процессов.
Одной из актуальных задач дорожной отрасли является оптимизация рабочего процесса уплотнения асфальтобетонного покрытия, выполняемого рабочими органами асфальтоукладчика. Системы автоматического управления, устанавливаемые на асфальтоукладчиках, не имеют подсистем управления уплотнением. Ручная настройка режимных параметров не всегда обеспечивает требуемый коэффициент уплотнения, влияющий на качественные показатели дорожного покрытия. В таких слу- чаях приходится дополнительно увеличивать количество проходов катка, что ведет к возрастанию расходов на топливо и заработную плату рабочим, а также себестоимости дорожного строительства.
Целью статьи является разработка метода адаптивного управления подсистемой уплотнения асфальтоукладчика для обеспечения оптимальной степени уплотнения в процессе дорожного строительства.
Процесс уплотнения асфальтобетонной смеси с помощью асфальтоукладчика начинается с того, что оператор, исходя из рекомендаций нормативных документов, назначает скорость движения асфальтоукладчика и частоту вращения эксцентрикового вала привода трамбующих брусьев.
При всей тщательности выбора данных начальных режимных параметров предугадать неровности микрорельефа, а также изменение свойств асфальтобетонной смеси при охлаждении практически невозможно. Но можно косвенно судить о распределении неровностей и плотности основания, а соответственно, об ожидаемом коэффициенте уплотнения асфальтобетонной смеси.
На основании исследований асфальтоукладчика с перспективным уплотняющим рабочим органом [1], проведенных в реальных условиях эксплуатации, были получены экспериментальные зависимости, позволяющие создать систему управления процессом уплотнения. На трамбующих брусьях асфальтоукладчика были установлены тензодатчики, которые фиксировали изменение усилия на трамбующих брусьях в зависимости от частоты трамбования и скорости движения (рис. 1, где F 1М и F 2М – это усилия на первом и втором брусе соответственно). Также фиксировался коэффициент уплотнения в зависимости от частоты трамбования n 1 и скорости движения асфальтоукладчика V (рис. 2).
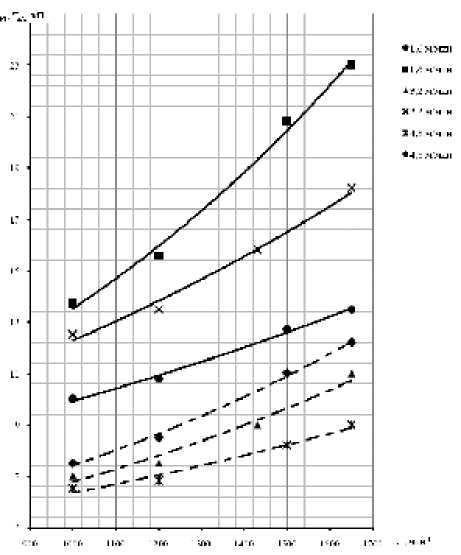
Рис. 1. Зависимость усилия на трамбующих брусьях от частоты трамбования при различных скоростях движения асфальтоукладчика
Если сопоставить данные двух графиков, то можно получить зависимость коэффициента уплотнения К у от усилий на трамбующих брусьях.
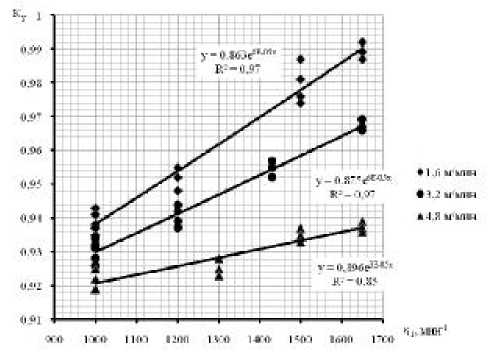
Рис. 2. Зависимость коэффициента уплотнения от частоты трамбования при различных скоростях движения асфальтоукладчика
Законы изменения коэффициента уплотнения от усилий на брусьях достаточно точно аппроксимируются в среде MATLAB с помощью многочленов второй – γ = ρ 1 χ 2 + + ρ 2 χ + ρ 3 и четвертой степени – γ = ρ 1 χ 4+ ρ 2 χ 3+ ρ 3 χ 2+ ρ 4 χ + ρ 5. Таким образом, можно создать математическую модель управления процессом уплотнения асфальтоукладчика, руководствуясь данными с датчиков усилия брусьев. Предлагается алгоритм управления процессом уплотнения асфальтобетонной смеси, блок-схема которого изображена на рис. 3.
В данном алгоритме, в качестве начальных параметров, машинисту-оператору достаточно задать скорость движения и требуемый коэффициент уплотнения. Задание начальной частоты трамбования необязательно, но желательно задать ее сразу, исходя из рекомендаций нормативной литературы, для обеспечения на первых циклах трамбования коэффициента уплотнения, близкого к проектному.
После запуска алгоритма система автоматического управления получит данные об усилиях, возникших на трамбующем брусе, и передаст их математическую модель, построенную на основе экспериментальных зависимостей. В зависимости от усилий на брусьях модель выдаст ожидаемый коэффициент уплотнения, а на сравнении его с проектным сделает выводы: требуется ли повысить частоту трамбования для достижения заданного К у либо уменьшить ее.
Преимущество данной системы в том, что если оператор ошибется в задании частоты трамбования, то она быстро установит ее на требуемый уровень. Также, если в процессе уплотнения появится неровный участок, увеличится толщина, то частота трамбования изменится и будет получена требуемая степень уплотнения на всем участке. Таким образом, получается адаптивная интеллектуальная система.
Реализация алгоритма управления выполнена с помощью современной специальной программной системы компьютерной математики – матричной математи- ческой системы MATLAB [2; 3], пакета визуального имитационного и ситуационного моделирования Simulink, позволяющего исследовать линейные и нелинейные блочные динамические системы и устройства произвольного назначения (рис. 4).
Начальные параметры: частота трамбования и скорость асфальтоукладчика подаются на вход модели асфальтоукладчика (рис. 5).
Это сделано для наглядной демонстрации работы алгоритма управления процессом уплотнения асфальтобетонной смеси. Внутри данной модели существуют две подсистемы для генерации усилий на первом и втором трамбующих брусьях. Генерация усилий основана на данных (см. рис. 1, 2), к которым прибавляется некоторый шум, обычно возникающий на тензодатчиках при работе реального асфальтоукладчика, при этом шум на первом брусе частично влияет и на второй брус, так как во многом связан с неровностями и неравномерностями распределения плотности смеси по рабочему участку.
Далее, как видно из реализации алгоритма (см. рис . 4), информационные сигналы с тензодатчиков на брусьях передаются на контроллер, кроме этого, ему на вход также подходит требуемый коэффициент уплотнения и шаг изменения частоты трамбования.
В контроллере, на основании усилий с трамбующих брусьев, генерируется ожидаемый коэффициент уплотнения, который, в свою очередь, проходит некоторую фильтрацию в блоке limits с целью отсеивания «выбросов» системы.
Выходом контроллера является положительный или отрицательный заданный шаг изменения частоты, в за-
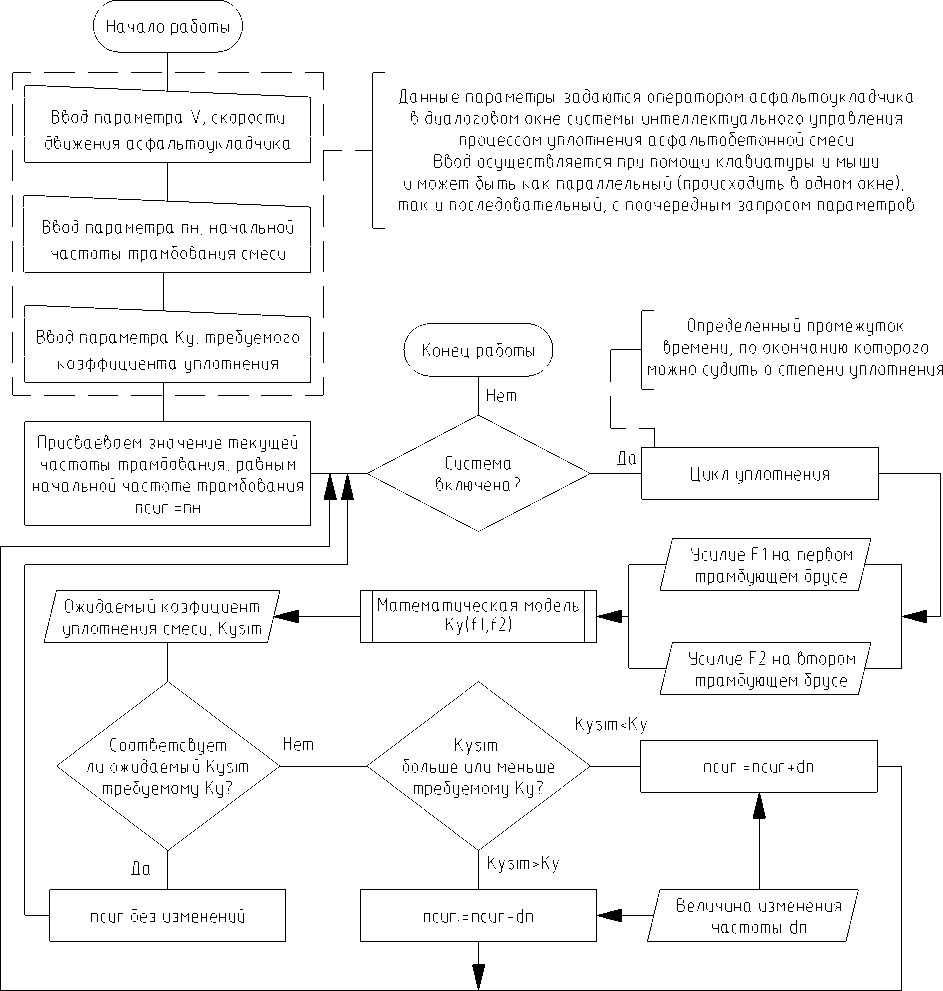
Рис. 3. Блок-схема алгоритма работы системы управления рабочим органом асфальтоукладчика в процессе уплотнения асфальтобетонной смеси
висимости от требуемого и ожидаемого коэффициента уплотнения (если требуется обеспечить большую частоту, т. е. больший коэффициент уплотнения, то вход положительный, и наоборот). Также контроллер выдает данные для отладки – ожидаемый коэффициент уплотнения.
Основной выход контроллера (величина изменения частоты) складывается с текущей частотой и присваивается в качестве новой частоты трамбования. Оптимизация частоты проводится на каждом цикле процесса уплотнения, что позволяет достичь большего качества уплотнения смеси, повышения производительности, с наименьшими затратами ресурсов как энергетических, так и человеческих.
Проведены испытания на математических моделях, разработанных в среде MATLAB/Simulink (рис. 6–8). Как видно, система управления эффективно оптимизирует процесс уплотнения асфальтобетонной смеси, так что ее можно рекомендовать в качестве модернизации суще- ствующих систем автоматического управления, добавлением подсистемы уплотнения.
При моделировании (рис. 7) система управления сразу же «заметила» недостаточность текущей частоты трамбования и постепенно увеличивала ее. Как только система достигла показателей, близких к заданному К у, оптимизация продолжается в зависимости от неровностей микрорельефа основания.
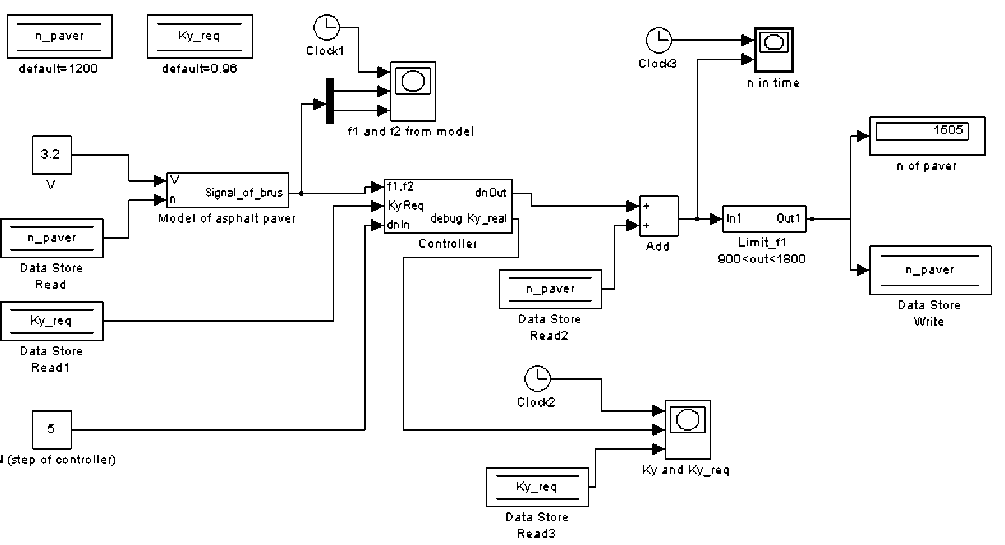
Рис. 4. Реализация алгоритма в среде MATLAB/Simulink
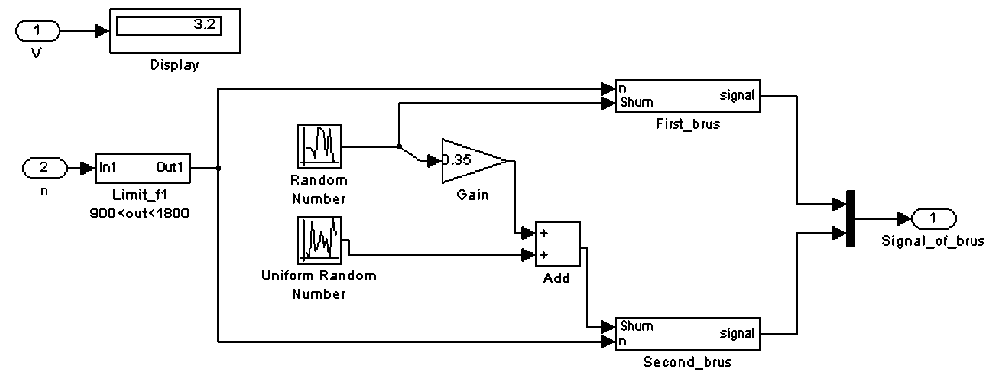
Рис. 5. Реализация модели асфальтоукладчика
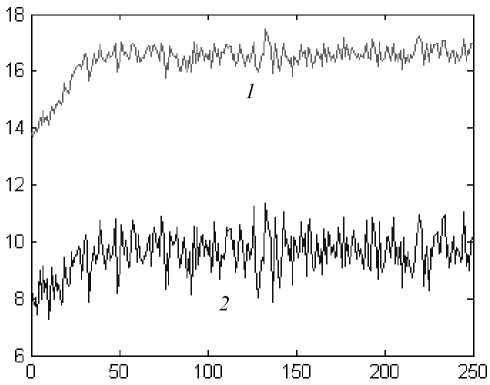
Рис. 6. Генерируемые усилия на трамбующих брусьях: 1 – первый брус; 2 – второй брус
