Моделирование системы ориентации панели солнечной батареи на базе нечеткой логики в среде визуального моделирования Simintech

Автор: Чубарь А.В., Устименко В.В., Михайленко Л.А., Мызникова В.А., Мацкевич Ю.А.
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Математика, вычислительная техника и управление
Статья в выпуске: 1 т.22, 2021 года.
Бесплатный доступ
Получение электрической энергии на основе возобновляемых источников обусловлено, прежде всего, исчерпанием традиционных природных источников энергии, таких как уголь, нефть, газ, и на сегодняшний день является перспективной областью развития. Общеизвестно и научно доказано неблагоприятное влияние на окружающую среду использования традиционных энергодобывающих технологий. Применение их неминуемо ведет к изменению климата, поэтому тема перехода от использования традиционных источникам энергии к альтернативным, несомненно, актуальна. Так, в последнее время, приобрело актуальность использование гелиоэлектростанций с фотоэлектрическими модулями. Однако эффективность применения таких установок во многом зависит от правильной их ориентации на Солнце: чем точнее будет установлена система, тем больше энергии она сможет преобразовать. В статье представлены результаты разработки имитационной модели системы управления процессом ориентации панели солнечной батареи. Для максимальной выработки солнечной энергии система управления со слежением за Солнцем построена с применением нечёткой логики: сформулированы правила нечеткого регулирования для управления положениями объекта относительно вертикальной и горизонтальной плоскостей. Использование нечеткой логики основано на продукционной модели знаний, которая подразумевает под собой использование лингвистических переменных, позволяющих избежать ограничений, присущих классическим продукционным правилам. Использование нечеткого управления позволяет в автономном режиме в кротчайшие сроки корректировать движение панели, уменьшая тем самым возникающие потери электроэнергии. В качестве среды разработки системы используется российская среда динамического моделирования технических систем SimInTech. Имитационная модель представляет собой несколько подпроектов, объединенных в пакет единой базой данных. Модель системы реализована с применением типовых блоков и комплекса субмоделей, а также блока программирования. Результат работы можно отследить в 3D-модуле встроенного визуального редактора, позволяющего объектно отобразить взаимодействие трёхмерных моделей. Для упрощения и более тонкой реализации работы проекта использована система загрузки данных точки восхода и захода Солнца из внешнего файла Excel.
Панель солнечной батареи, нечеткая логика, динамическое моделирование, simintech, 3d-визуализация
Короткий адрес: https://sciup.org/148322018
IDR: 148322018 | УДК: 681.5.073 | DOI: 10.31772/2712-8970-2021-22-1-47-60
Simulation of solar panel orientation system based on fuzzy logic in Simintech visual simulation environment
Obtaining electricity from renewable energy sources is primarily due to the exhaustion of traditional natural energy sources, such as coal, oil, gas. Today it is a promising area of development. The adverse impact on the environment of the use of traditional energy technologies is well known and scientifically proven. The use of traditional technologies inevitably leads to climate change, so the topic of the transition from traditional to alternative energy sources is undoubtedly relevant. Using of solar power plants with photovoltaic modules recently has gained relevance. However, the efficiency of such installations depends largely on their correct orientation to the Sun: the more precisely the system is installed, the more energy it will be able to convert. This article presents the results of the development of a simulation model of the solar panel orientation control system. To maximize the production of solar energy, the control system with tracking the Sun is built using fuzzy logic: fuzzy rules are formulated to control the positions of the object relative to the vertical and horizontal planes. The use of fuzzy logic is based on the product model of knowledge, which implies the use of linguistic variables to avoid the limitations inherent in classical product rules. The use of fuzzy control allows to correct the movement of the panel in the shortest time in the autonomous mode, thus reducing the arising power losses. Russian SimInTech dynamic simulation environment for technical systems is used as the system development environment. Simulation model is represented by several subprojects, united in a single database. The system model is implemented using standard blocks and a set of submodels, as well as a programming unit. The result of the work can be tracked in the 3D module of the built-in visual editor, which allows you to display the interaction of threedimensional models objectively. In order to simplify and more finely implement the work of the project, a system of loading data, sunrise and sunset points, from an external Excel file was used.
Текст научной статьи Моделирование системы ориентации панели солнечной батареи на базе нечеткой логики в среде визуального моделирования Simintech
Введение. Во многих странах использование регенеративных ресурсов на сегодняшний день превосходит 10 %, а в некоторых составляет более 20 %. Большое распространение получили автономные системы электропитания на основе солнечных батарей (СБ). Нередко сфера их использования – регионы, располагающиеся отдельно от централизованной сети энергоснабжения. В России в связи с малым количеством солнечных дней использование альтернативных ресурсов не превосходит более 20 %. Однако на сегодняшний день существует большое число международных учреждений, цель которых – распространение идеи внедрения и повсеместного использования возобновляемых источников энергии, а также непосредственное распространение информации, знаний и технологий в этой области. Постоянное снижение стоимости солнечных батарей, происходящее последние несколько лет, также приводит к более интенсивному использованию солнечной энергии по всему миру [1].
Использование новых материалов, а также возможность установки аккумуляторных батарей позволяет использовать накопленную энергию в неблагоприятную погоду: солнечные модули производят электричество, даже когда нет прямого солнечного света. Так, например, при легкой облачности можно получить 60–80 % мощности от «полного» Солнца, при пасмурно погоде – до 30 %.
Тем не менее оптимальными условиями для генерации электроэнергии являются чистый, ясный, солнечный день, а также ориентация панелей перпендикулярно солнечному свету. Точная ориентация рабочих поверхностей системы на Солнце обеспечит достижение максимальной производительности.
В работе исследуется задача повышения точности ориентации панели солнечной батареи. В качестве решения поставленной задачи предлагается применение нечёткого управления [2], которое получило широкое применение в таких экспертных системах, как нелинейный контроль и управление производством, самообучающиеся машины, системы планирования, прогнозирования и многих других [3]. Экспериментально показано, что нечеткое управление дает лучшие результаты по сравнению с результатами, получаемыми при классических алгоритмах управления.
Описание объекта автоматизации. Гелиоэлектростанция - это комплекс регулирующей аппаратуры одной или нескольких панелей солнечных батарей. Панели, как правило, прямоугольной формы, составленные из последовательно параллельно соединенных типовых солнечных элементов, формирующих вольтамперную характеристику.
Вид характеристики определяется:
-
- интенсивностью солнечного потока, падающего на панель;
-
- температурой панели;
-
- временем года;
-
- погодными условиями и взаимным расположением панелей и Солнца.
Максимальная отдаваемая в нагрузку мощность при прочих других равных условиях формируется углами падения солнечного излучения на рабочую поверхность панели. Поэтому управление ориентацией панелей солнечных батарей является важнейшим фактором при эксплуатации гелиоэлектростанций.
Панель солнечной батареи имеет определенные географические координаты по отношению к экватору, следовательно, и по отношению к текущему положению солнца на земном горизонте. Система ориентации панели, включающая комплекс электромеханических устройств, позволяет изменять угол азимута и угол места, определяющие ориентацию панели в трехмерном пространстве. Система управления обеспечивает изменение углов панели солнечной батареи в автоматическом режиме с целью наилучшей ее ориентации на солнце.
Регулируемыми выходными координатами являются угол азимута, изменяющийся в диапазоне от -90 до +90 градусов, и угол места, изменяющийся в диапазоне в диапазоне от 0 до +90 градусов. Управляющие координаты - сигналы управления электроприводами. В качестве основных внешних воздействий выступают текущие координаты солнца.
На рис. 1 приведена упрощенная структурная схема контура управления опорноповоротного устройства по углу азимута и углу наклона солнечной батареи, где МК - микроконтроллер; НЧ - непрерывная часть.
Элементы непрерывной части (исполнительный двигатель, редуктор, опорно-поворотная платформа и датчик угла положения) представлены соответствующими им моделями в виде типовых динамических звеньев [4].
Микроконтроллер реализует алгоритм управления, обеспечивающий отсутствие статической ошибки и низкий процент перерегулирования. С целью получения необходимых показателей формируют ПИД закон управления.
При проектировании и отработке алгоритмов управления для АСУТП целесообразно использование визуального моделирования, когда реальный объект представляется его цифровым двойником. Такой подход позволяет за короткое время разрабатывать, сравнивать, настраивать, отрабатывать различные алгоритмы управления в АСУТП и обосновывать целесообразность их использования.
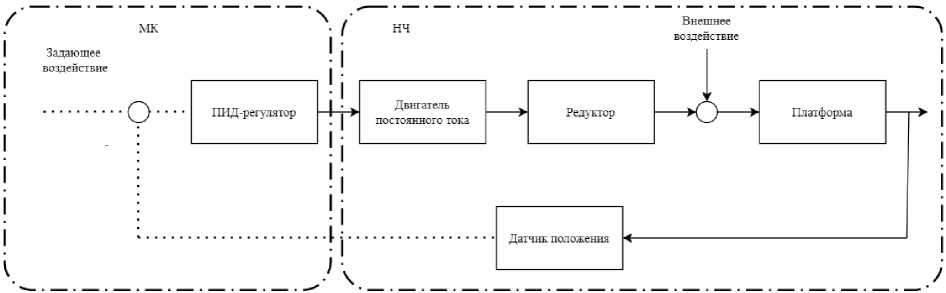
Рис. 1. Структурная схема контура управления опорно-поворотного устройства
Fig. 1. Block diagram of the control loop of the rotary support device
Ниже предлагается алгоритм построения и отладки в среде визуального моделирования SimInTech регулятора на основе нечеткой логики для управления ориентацией панели солнечной батареи.
Нечеткая логика. Математическая теория нечетких множеств позволяет описывать нечеткие понятия и знания, оперировать этими описаниями и делать нечеткие выводы.
Применение нечеткой логики в системах сопровождается прохождением следующих этапов:
-
1. Определение входных и выходных параметров рассматриваемой системы.
-
2. Фаззификация данных переменных: преобразование значения из пространства физических переменных к нечёткому виду лингвистических переменных (ЛП).
-
3. Задание функции принадлежности для каждой лингвистической переменной.
-
4. Формирование базы правил выводов для реализуемой нечёткой системы.
-
5. Дефаззификация выходных переменных: обратное преобразование нечётких величин к физическим переменным.
-
6. Настройка и анализ адекватности разработанной модели в системе реального времени.
Лингвистическая переменная представляет собой некоторую переменную, например, «уровень воды». Значения, которые данная ЛП может принимать, называются термами. Для ЛП «уровень воды» термами, например, могут выступать – «низкий», «средний», «высокий» и т. д. Однако эти термы должны иметь точные физические значения. Так, например, переменная «угол наклона» может принимать любое значение от 0 до 90 градусов.
Согласно теории нечетких множеств [5], любому значению угла в диапазоне от 0 до 90 градусов может быть сопоставлено некоторое число, варьируемое от 0 до 1, которое определяет степень принадлежности данного значения наклона (допустим, 75 градусов) к тому или иному терму ЛП «угол наклона». В нашем случае углу в 75 градусов можно задать степень принадлежности к терму «высокий», равную 0,85, а к терму «низкий» – 0,15. Точное определение степени принадлежности определяется только при работе с экспертами. Существует мнение, что для большинства систем необходимо минимум три терма для её описания: «низкий», «средний», «высокий», которые заключают в себе два экстремальных значения и среднее. Если трёх термов недостаточно, точность оценки можно повысить, увеличив количество термов. Максимально допустимое число термов не ограничено и зависит целиком от рассматриваемой системы, а также точности описания, предъявляемой к системе.
Другими словами, следует разработать свод правил, которые описывают стратегию управления рассматриваемой системы. Наиболее часто для описания зависимостей между лингвистическими переменными база правил представляется в форме структурированного текста с применением нечетких логических операций в форме связок: «И», «ИЛИ», «ЕСЛИ – ТО», «НЕ». Например, «ЕСЛИ угол низкий, ТО двигатель включить».
Моделирование системы ориентации панели солнечной батареи в среде SimInTech. Из всех существующих программных комплексов моделирования систем для реализации проекта выбор был сделан в пользу российской среды разработки – программного пакета SimInTech [6; 7]. Рациональность использования программного обеспечения обусловлена несколькими критериями:
-
– удобный редактор структурных схем;
-
– широкая библиотека типовых блоков;
-
– наличие модуля визуального проектирования;
-
– встроенный язык программирования.
По характеристикам данный вариант подобен иностранным программам, таким как Simulink , SumSim и др. [8].
Для создания сложных математических моделей, таких как данный проект, производится объединение моделей основных подсистем, реализованных в виде отдельных проектов, в единый пакет. Для связи проектов между собой используется база данных сигналов, представляющая собой файловую базу данных, в которой содержатся все необходимые переменные для работы проектов. Часть базы данных сигналов проекта представлена на рис. 2.
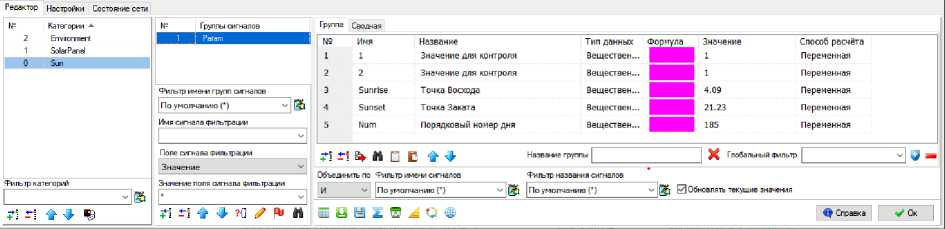
Рис. 2. База данных сигналов
Fig. 2. Signal database
Модель ориентации панели солнечной батареи представляет собой пакет проектов, соединенных единой базой данных. В состав пакета входят следующие проекты:
-
– модель ориентации панели солнечной батареи;
-
– модель управления положением Солнца;
-
– модуль 3D-визуализации.
В первом проекте реализован блок управления системой навигации на базе нечёткой логики (рис. 3). Субструктура обеспечивает подсистему наведения установки на Солнце по осям X ( Xin/Xout – порт входа/ выхода в субмодель) и Y ( Yin/Yout – порт входа/ выхода в субмодель): в вертикальной и горизонтальной плоскостях согласно заранее сформулированной базе правил [9].
В качестве входного воздействия выступают значения с фотоэлектрического датчика, расположенного на панели, определяющие ее текущее положение по отношению к Солнцу [10].
Модель Солнца отображает принцип перемещения объекта по заданной траектории (рис. 4). Схема определяет основные функциональные части изделия, их назначения и взаимосвязи между ними.
Схема состоит из модулей:
-
– список сигналов, подаваемых на вход;
-
– имитатор движения Солнца;
-
– текущее положение Солнца.
Субмодель «Имитация движения Солнца» содержит в себе схему управления приводом движения (рис. 5) из суммирования поступающих на вход задающих сигналов управления таких как: BtnUp – движение объекта вверх, BtnRight – вправо, BtnForw – вперед, BtnDown – вниз, BtnLeft – влево и BtnBack – назад, что приводит в действие необходимые ключи ( Param_1 – ключ регулирования точки восхода, Param_2 – ключ регулирования точки заката) для продолжения пути сигналов. Поступающие сигналы объединяются в одну точку, которая создает необходимую траекторию движения.
График угла X
| ЗР.Ыие Высота Солнца
3D red
Положение по горизонтали

Блок управления системой на базе нечеткой логики
--- HContrLFiXll
Угол относительно оси X (от 0 до +90град)
--- MContrLFlYll
Угол относительно оси Y (от -90 до 90град)
Рис. 3. Схема модели ориентации панели солнечной батареи
Fig. 3. Schematic of the solar panel orientation model
АО А1
А2
АЗ
А4
А5 Аб
BtnUp
В tn Down BtnRight BtnLeft BtnForw BtnBack
► BtnUp
3D_green ► BtnDown
-► BtnRight
3DJ*je
> BtnLeft
► BtnForw
3D_red ► BtnBack


Список сигналов
Имитация движения Солнца
Положение по оси X
—> | 3D blne^
Поло жение по ос и Z
— ► 3D red 1
Положение по осиY
Рис. 4. Модель управления положением Солнца
-
Fig. 4. Model for controlling the position of the Sun
Реализовано окно анимации (рис. 6) с возможностью управления солнечным объектом как вручную, так и в автоматическом режиме, согласно заданному движению, которое, прежде всего, зависит от точек восхода и захода Солнца. Данные подгружаются в систему из внешнего файла формата . xls , в которых содержатся следующие сведения:
– порядковый день;
– точка восхода;
– точка захода.
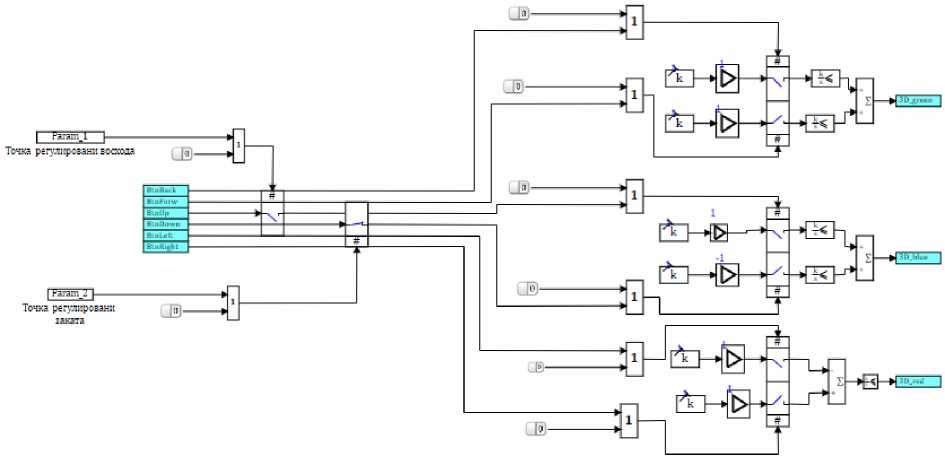
Рис. 5. Состав субмодели «Имитация движения Солнца»
-
Fig. 5. Composition of the “Sun Motion Simulation” submodel
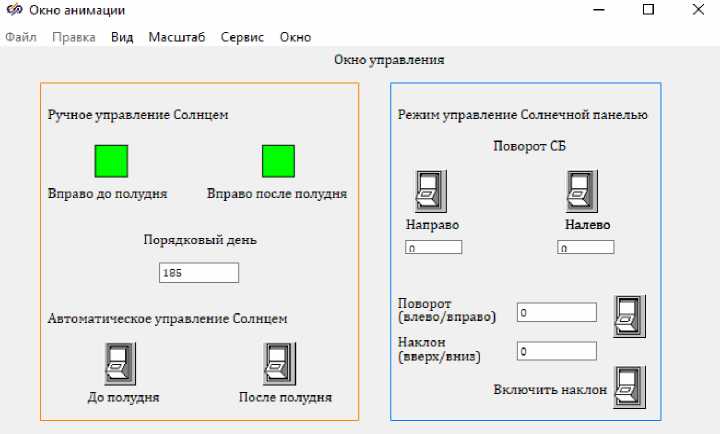
Рис. 6. Внешний вид окна анимации
-
Fig. 6. The appearance of the animation window
Непосредственное управление панелью в вертикальной и горизонтальной плоскостях реализуется в субмоделе «Блок управления системой на базе нечёткой логики», состав которой представлен на рис. 7.
Значения, получаемые с фотоэлектрического датчика, сравниваются с текущим положением панели относительно Солнца. Происходит расчет ошибки – разницы между двумя переменными. В зависимости от величины ошибки вырабатывается управляющее воздействие на панель, корректируя тем самым ее положения, устраняя ошибку.
В данном проекте используются следующие лингвистические переменные: положение Солнца (высота); положение Солнца (по горизонтали/ время суток); угол наклона панели; угол поворота панели.

Фазификация (высота Солнца)
Дефаззификация переменной


I™ I -
Псложение по горизонтали
-------► ] Tout |
. . -------- Поворот панели по оси Y
Фазификация Дефаззифккация 1
(время суток) переменной
Рис. 7. Состав субмодели «Блок управления системой на базе нечёткой логики»
Fig. 7. Composition of the “System control unit based on fuzzy logic” submodel
Термы лингвистических переменных описаны в табл. 1. Величины термов представлены на рис. 8 и 9.
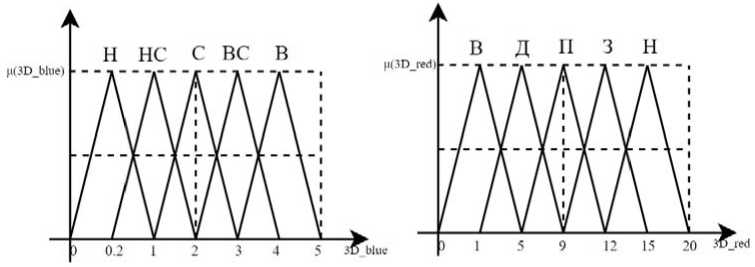
Рис. 8. Лингвистические переменные «Высота Солнца», «Положение Солнца»
Термы лингвистических переменных
Таблица 1
|
Лингвистическая переменная |
Термы (кратко) |
Термы |
|
«Высота» |
Н |
Низко |
|
НС |
Ниже среднего |
|
|
С |
Средне |
|
|
ВС |
Выше среднего |
|
|
В |
Высоко |
|
|
«Время суток» |
В |
Восход |
|
Д |
День |
|
|
П |
Полдень |
|
|
З |
Заход |
|
|
Н |
Ночь |
|
|
«Угол наклона – X» «Угол поворота – Y» |
Н |
Нулевой |
|
М1 |
Малый 1 |
|
|
М2 |
Малый 2 |
|
|
С1 |
Средний 1 |
|
|
С2 |
Средний 2 |
|
|
Б1 |
Большой 1 |
|
|
Б2 |
Большой2 |
Fig. 8. Linguistic variables “Height of the Sun”, “Position of the Sun”
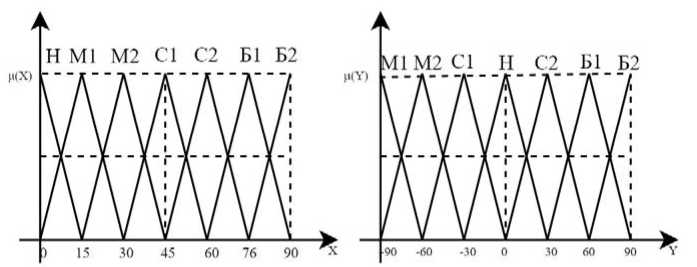
Рис. 9. Лингвистические переменные «Угол наклона – X», «Угол поворота – Y»
Fig. 9. Linguistic variables “Angle of the X-axis”, “Angle of the Y-axis ”
Сформулированные правила логического вывода выходной переменной, записанные в виде базы правил, представлены в табл. 2.
Правила логического вывода выходной переменной
Таблица 2
|
Номер правила |
Высота Солнца |
Положение Солнца |
Угол наклона панели – X |
Угол поворота панели – Y |
|
1 |
Н |
В |
M1 |
М2 |
|
2 |
Н |
Д |
M1 |
С1 |
|
3 |
Н |
П |
M1 |
Н |
|
4 |
Н |
З |
M1 |
С2 |
|
5 |
Н |
Н |
M1 |
Б1 |
|
6 |
НС |
В |
М2 |
М2 |
|
7 |
НС |
Д |
М2 |
С1 |
|
8 |
НС |
П |
М2 |
Н |
|
9 |
НС |
З |
М2 |
С2 |
|
10 |
НС |
Н |
М2 |
Б1 |
|
11 |
С |
В |
С1 |
М2 |
|
12 |
С |
Д |
С1 |
С1 |
|
13 |
С |
П |
С1 |
Н |
|
14 |
С |
З |
С1 |
С2 |
|
15 |
С |
Н |
С1 |
Б1 |
|
16 |
ВС |
В |
С2 |
М2 |
|
17 |
ВС |
Д |
С2 |
С1 |
|
18 |
ВС |
П |
С2 |
Н |
|
19 |
ВС |
З |
С2 |
С2 |
|
20 |
ВС |
Н |
С2 |
Б1 |
|
21 |
В |
В |
Б1 |
М2 |
|
22 |
В |
Д |
Б1 |
С1 |
|
23 |
В |
П |
Б1 |
Н |
|
24 |
В |
З |
Б1 |
С2 |
|
25 |
В |
Н |
Б1 |
Б1 |
Проект функционирует следующим образом: модель Солнца движется по заданной траектории, которая зависит от точек восхода и захода, различных для каждого порядкового дня. Солнце может совершать движения как в автоматическом режиме, так и в режиме управления оператором, который позволяет управлять скоростью движения объекта. Фотоэлектрические датчики, расположенные на панели солнечной батареи, подают информацию о текущем поло- жении Солнца на вход системы. Рассчитывается разница между текущими положениями панели и Солнца относительно друг друга. Если разница существует, блок управления системой на базе нечёткой логики вырабатывает управляющее воздействие на панель и обеспечивает подсистему наведения установки на Солнце в вертикальной и горизонтальной плоскостях согласно заранее сформулированной базе правил.
Минимизация ошибки положения панели относительно Солнца позволяет повысить процент получаемой энергетической мощности благодаря оптимальному углу падения солнечных лучей на поверхность панели.
Результаты работы системы можно проследить в реализованном окне 3D-визуализации (рис. 10–12). Благодаря применению нечеткой логики движение панели осуществляется в автоматическом режиме с оптимальной скоростью и позволяет своевременно корректировать угол падения солнечных лучей на панель.
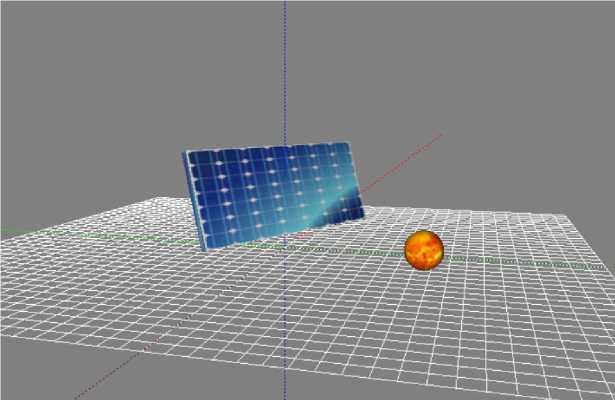
Рис. 10. 3D-визуализация результата моделирования системы. Часть 1
Fig. 10. 3D visualization of the result of system modeling. Part 1
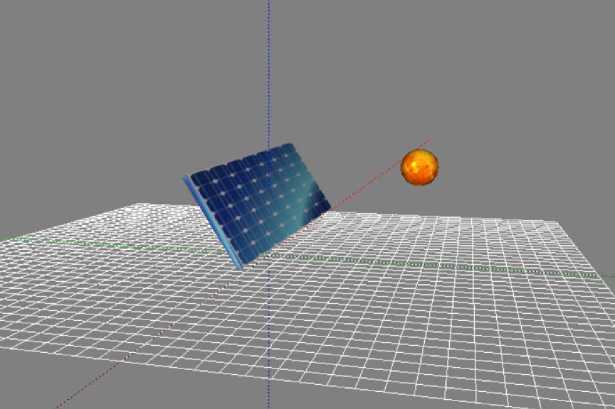
Рис. 11. 3D-визуализация результата моделирования системы. Часть 2
Fig. 11. 3D visualization of the result of system modeling. Part 2
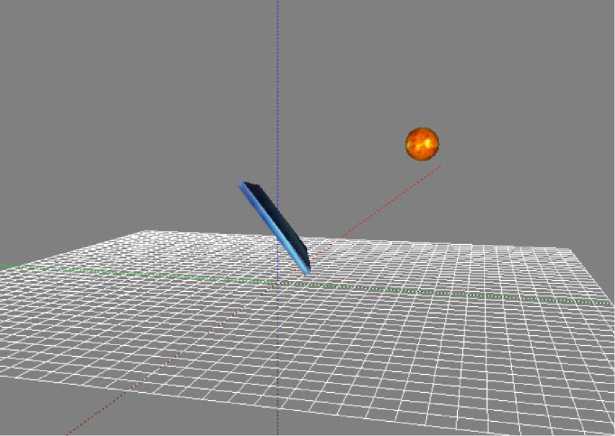
Рис. 12. 3D-визуализация результата моделирования системы. Часть 3
Fig. 12. 3D visualization of the result of system modeling. Part 3
Заключение. В среде динамического моделирования технических систем SimInTech [11–17] с использованием типовых блоков общетехнических библиотек программного обеспечения разработана и реализована модель объекта автоматизации – системы ориентации панели солнечной батареи. Построена и протестирована модель регулятора на основе нечеткой логики, проведена настройка параметров модели.
Реализована возможность управления солнечным объектом как вручную, так и согласно программе, которая, прежде всего, зависит от точки восхода и захода Солнца. Управление системой навигации панели осуществляется с применением нечёткой логики, которая обеспечивает точное наведение установки на Солнце в вертикальной и горизонтальной плоскостях согласно заранее сформулированной базе правил.
Сформулированы и приведены в табличном виде правила логического вывода. Описаны применяемые лингвистические переменные и шкалы их термов, необходимые для управления ориентацией солнечной панели.
Для более комфортного отображения работы системы и упрощения восприятия результатов ее работы реализован модуль 3D-визуализации, позволяющий наглядно продемонстрировать взаимодействие объектов между собой и проследить за эффективностью применение нечеткого управления.
Регулятор на базе нечеткой логики обеспечивает качество регулирования положения солнечной батареи в пространстве, сопоставимое с ПИД-регулятором, обеспечивая при этом большую гибкость в настройке, но требует при этом большего количества параметров, позволяет в автоматическом режиме корректировать положение панели относительно Солнца, мак-симализируя производительность системы.
Аналогично в среде динамического моделирования SimInTech могут быть построены нечеткие регуляторы для управления другими подобными технологическими процессами.
Список литературы Моделирование системы ориентации панели солнечной батареи на базе нечеткой логики в среде визуального моделирования Simintech
- Нефедова Л. В Опыт и перспективы использования возобновляемых источников энергии в странах Африки для устойчивого развития и снижения эмиссии парниковых газов // Возобновляемая энергетика XXI в.: энергетическая и экономическая эффективность : материалы Ме-ждунар. конгресса. 2016. С. 27-32.
- Tabakov E. V., Zinina A. I., Kosinsky M. Y. Practical application of the fuzzy logic apparatus in solving the problem of orientation of solar batteries // 44th Academic Space Conference: Dedicated to the Memory of Academician S. P. Korolev and Other Outstanding Russian Scientists - Pioneers of Space Exploration (28-31.01.2020); Bauman Moscow State Technical University Moscow, 2020. Vol. 2318.
- Voltage Regulation Control with Adaptive Fuzzy Logic for a Stand-Alone Photovoltaic System / C. B. Nzoundja Fapi, P. Wira, M. Kamta1, B. Colicchio // European Journal of Electrical Engineering. 2020. Vol. 22, No. 2. P. 145-152.
- Справочная система SimInTech [Электронный ресурс]. URL: http://help.simintech.ru/ (дата обращения 28.02.2021).
- Zadeh L. Fuzzy sets. Information and control // The journal of symbolling logic. 1965. Vol. 8. P.338-353.
- Среда динамического моделирования технических систем SimInTech: Практикум по моделированию систем автоматического регулирования: учебное пособие / Б. А. Карташов, Е. А. Шабаев, О. С. Козлов и др. // М. : ДМК Пресс, 2017. С. 241-243.
- Хабаров С., Шилкина М. Основы моделирования технических систем. Среда SimInTech. СПб. : Лань, 2019. 120 с.
- Монахов О. Пакеты прикладных программ МВТУ, MATLAB, SIMINTECH и их применение в учебном процессе на специальности «Управление в технических системах». М. : РУТ (МИИТ). 2019. 92 с.
- Энциклопедия АСУТП [Электронный ресурс]. URL: https://www.bookasutp.ru/Chapter 5_7.aspx (дата обращения 28.02.2021).
- Cabeza-Gras O., Jaramillo-García V. Design of a photovoltaic solar plant: Distributed generation in medium tension to a bar of the electricity substation // Renewable Energy and Power Quality Journal. 2020, No. 18. P. 664-668.
- Устименко В. В., Чубарь А. В., Мызникова В. А. Построение нечетких регуляторов для систем управления автономных объектов в среде SimInTech // Космические аппараты и технологии. 2019. № 1(27). С. 22-27.
- Устименко В. В., Чубарь А. В., Мызникова В. А. Применение нечетких регуляторов в динамических системах // Актуальные проблемы авиации и космонавтики : материалы V Ме-ждунар. науч.-практ. конф., посвящ. Дню космонавтики. Красноярск, 2019. Т. 1. С. 593-594.
- Устименко В. В., Чубарь А. В., Русин Д. С. Применение генетического алгоритма для оптимизации параметров системы управления автономным объектом с использованием среды динамического моделирования SimInTech // Робототехника и искусственный интеллект : материалы XI Всеросс. науч.-техн. конф. с междунар. участием. 2019. С. 261-266.
- Устименко В. В., Чубарь А. В. Построение нечеткого супервизора в среде динамического моделирования технических систем SimInTech // Проспект Свободный - 2020 : материалы XVI Междунар. конф. студентов, аспирантов и молодых ученных, посвящ. году памяти и славы. 2020. С. 1849-1852.
- Михайленко Л. А., Устименко В. В., Чубарь А. В. Построение системы управления процессом ориентации панели солнечной батареи в среде динамического моделирования технических систем SimInTech // Космические аппараты и технологии. 2020. Т. 4, № 3(33). С. 178-185.
- Параметрический синтез регулятора метаэвристическим алгоритмом в среде SimInTech / В. В. Устименко, Д. С. Русин, Л. А. Михайленко и др. // Космические аппараты и технологии. 2020. Т. 4, № 3(33). С. 171-177.
- Ustimenko V. V., Chubar A. V., Mikhaylenko L. A. Automated setting of regulators for automated process control systems in the SIMINTECH visual modeling system // Siberian Journal of Science and Technology. 2020. Vol. 21, No. 3. P. 337-346.
