Моделирование универсального задающего блока автоматизированной системы управления процессом декарбонизации

Автор: Зуев Алексей Вячеславович, Иванчура Владимир Иванович, Федоренко Александр Александрович
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Математика, механика, информатика
Статья в выпуске: 3 (24), 2009 года.
Бесплатный доступ
Рассмотрена функция и структура задающего элемента автоматической системы управления процессом декарбонизации. Определена и смоделирована экспериментальная зависимость требуемой мощности вентилятора в функции параметров декарбонизатора, процесса декарбонизации и водно-газовой системы.
Автоматизированная система управления, декарбонизация, коррозионная агрессивность
Короткий адрес: https://sciup.org/148175989
IDR: 148175989 | УДК: 62-83:
Modeling universal assigning block automated managerial system by decarbonization process
The paper considers function and structure assigning element of the automated system of the process. The experimental dependency required powers of the ventilator in functions parameter decarbonizator, parameter of the process and water-gas system are defined and prototyped.
Текст научной статьи Моделирование универсального задающего блока автоматизированной системы управления процессом декарбонизации
Надежность и экономичность теплоэнергетических установок и систем теплоснабжения в значительной мере зависят от интенсивности внутренней коррозии оборудования и трубопроводов под действием циркулирующей в них воды. Коррозионная агрессивность воды обусловлена рядом физико-химических факторов, среди которых одним из главных является присутствие в воде растворенных газов, особенно кислорода и диоксида углерода СО2.
Основным типом декарбонизаторов, применяемых в теплоэнергетических водоподготовительных установках, являются противоточные насадочные декарбонизаторы с кольцами Рашига. В них удаление СО2 осуществляется при контакте обрабатываемой воды с атмосферным воздухом, нагнетаемым вентилятором.
В настоящее время вентилятор для декарбонизатора выбирается при его проектировании исходя из расчетной максимальной производительности, а следовательно, величина расхода воздуха на декарбонизацию постоянна [1]. Однако при работе декарбонизатора с неполной нагрузкой вентилятор продолжает работать с полной про- изводительностью, подавая в декарбонизатор избыточное количество воздуха, что приводит к перерасходу электроэнергии на его привод. Для более качественного удаления углекислоты из воды при меньших затратах электроэнергии процесс декарбонизации необходимо автоматизировать (рис . 1).
В данной схеме управление скоростью вращения вентилятора декарбонизатора осуществляется на основе системы «преобразователь частоты – асинхронный двигатель с короткозамкнутым ротором» (ПЧ–АД).
Важнейшим элементом автоматизированной системы является задающий блок, основная функция которого состоит в расчете требуемой мощности вентилятора декарбонизатора N по требуемой остаточной концентрации СО2 в зависимости от геометрических параметров декарбонизатора (номинального размера насадки, площади поперечного сечения колонки декарбонизатора, объема насадки колец Рашига, сопротивления элементов декарбонизатора), параметров процесса (расхода и температуры воды, исходного содержания СО2) и параметров гетерогенной дисперсной системы (ускорения
Рис. 1. Структурная схема автоматизации процесса декарбонизации
свободного падения, плотности воздуха, динамической вязкости воды).
Рассмотрим структуру (рис. 2) и работу задающего блока более подробно.
Логический блок Б1 служит для определения расхода воздуха в зависимости от основных параметров процесса декарбонизации: G и.в – расхода воды, т/ч; t и.в – температуры воды, °C; С СиОсх2 – исходной концентрации СО2, мг/кг; С С ос О т 2 – требуемой остаточной концентрации СО2, мг/кг. Математическая реализация этого блока приведена в уравнении регрессии зависимости остаточной концентрации С СосОт2 от параметров декарбонизации [2].
Блоки Б2 и Б7 – это блоки коэффициентов запаса. Коэффициент запаса принимаем равным 1, 2.
Блок Б3 предназначен для определения приведенной скорости воздуха в декарбонизаторе [3]:
Н=
V н н а а с с S ,
где V нас – объем насадки, м3. Выходом данного блока является сопротивление насадки.
Блок Б8 служит для перевода единицы измерения расхода воды из тонн в час (т/ч) в кубические метры в секунду (м3/с).
ω = D вент , 0 3 600 S
где S – площадь поперечного сечения колонки декарбонизатора, м2 (см. табл. 2.2.3 [3]).
Логический блок Б4 используется для определения параметров Х и Y [3]:
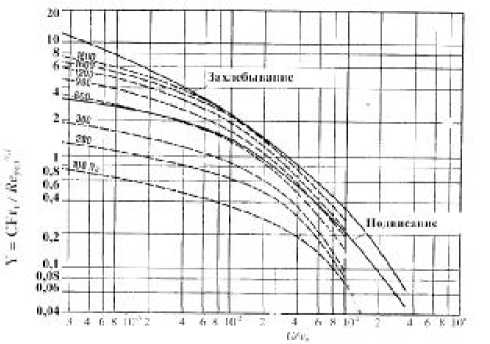
Рис. 3. Зависимость Р ор/ Н от Y и Х ( U/ ω 0)
Х = G и.в S ω 0
.
где G и.в – расход воды, м3/с;
Блок Б9 реализует сопротивление элементов декар-
бонизатора, Па.
CFrгr = 0,1 , усл где коэффициент С выбирается по табл. 2.24 [3]; Frr – кри-
терий Фурда для газа:
Fr =ω ω 0 gd
здесь g – ускорение свободного падения, g = 9,81 м/с2,
d – номинальный размер насадки, м; Reусл – условный критерий Рейнольдса для газа:
Re усл
ω 0 d ρ г µ ж
здесь ρ г – плотность воздуха, кг/м3, µ ж – динамическая вязкость воды, Па ⋅ с.
Блок Б5 предназначен для определения сопротивления 1 м орошаемой насадки Р ор / Н в зависимости от значений Х и Y . Величина Р ор / Н находится по графикам рис. 3 [3] после их преобразования в вычислительном блоке.
В блоке Б6 величина Р ор / Н умножается на высоту насадки Н , определяемой по формуле
Блок Б10 для рассчитывает требуемую мощность вен-
тилятора. Этот параметр определяется по формуле
D ⋅ Р
N = вент вент (7)
вент ,
3 600 η вент
где η вент. – коэффициент полезного действия вентилятора, %.
На основе рассмотренных выше соотношений в пакете МATLAB была построена модель задающего блока для получения требуемой мощности вентилятора (рис. 4). Расчет проводился для декарбонизатора с кольцами Рашига 25 ⋅ 25 ⋅ 3, который имеет следующие параметры: S = 9,25 м2; d = 0,025 м; С = 1; V нас = 13,4 м3; сопротивление элементов декарбонизаторов Р эл = 650 Па; КПД вентилятора принят 80 %. Физические параметры гетерогенной дисперсной системы: µ ж = 0,01 Па ⋅ с; ρ г = 1,2 кг/м3.
Разработанная модель состоит из следующих блоков: – блок Du определяет требуемый расход воздуха вен-
тилятора;
– блок Fr определяет критерий Фурда для газа (4);
– блок 1/ Re0,1 вычисляет величину, обратную условному критерию Рейнольдса в степени 0,1 (5);
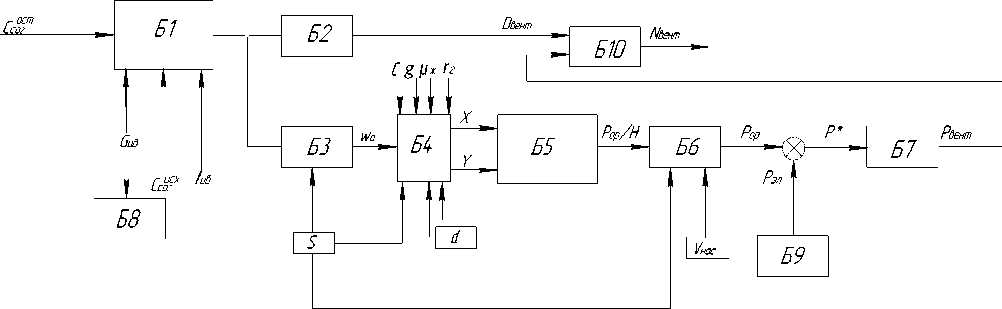
Рис. 2. Структурная схема задающего блока
-
– блок Р ор/ Н рассчитывает сопротивления 1 м орошаемой насадки;
-
– блоки Subsystem1...Subsystem4 используются как делители.
По результатам проведенных на модели экспериментов можно сделать следующие выводы:
-
– для уменьшения мощности приводного двигателя вентилятора необходимо, чтобы были обеспечены полная нагрузка декарбонизатора (500 т/ч воды), подогрев исходной воды и увеличена требуемая остаточная концентрация углекислого газа С СосОт2;
-
– зависимости преобретают линейный характер при исходной концентрации газа 60...70 мг/кг. Следовательно, при больших исходных концентрациях газа можно структурно упрощать задающий блок.
Модель задающего элемента системы автоматического управления процессом декарбонизации является универ- сальной, для ее настройки достаточно изменить параметры процесса, параметры декарбонизатора и дисперсной системы. Полученный задающий блок можно применять в автоматизированной системе управления во всех противоточных насадочных декарбонизаторов с кольцами Рашига.
