Моделирование управления преобразователем в системе типа "сеть постоянного тока - сеть переменного тока"

Автор: Климов П.Л., Доденгефт Е.А.
Журнал: Форум молодых ученых @forum-nauka
Статья в выпуске: 2 (30), 2019 года.
Бесплатный доступ
В статье описывается управление преобразователем для контроля уровня напряжения постоянного тока установки распределенной генерации, реактивной мощностью и коэффициентом мощности. В частности, описаны методы полевого или векторного управления электрическими машинами.
Распределенная генерация, преобразование, переменный ток, постоянный ток, падение напряжения
Короткий адрес: https://sciup.org/140285859
IDR: 140285859
Modeling of controller of the converter in the system of the type "DC network - ac network"
The article describes converter control for controlling the DC voltage level of a distributed generation plant, reactive power, and power factor. In particular, methods are described for field or vector control of electrical machines.
Текст научной статьи Моделирование управления преобразователем в системе типа "сеть постоянного тока - сеть переменного тока"
Управление преобразователем выполняется в системе координат d-q, которая исходит из метода полевого или векторного управления электрическими машинами [1, 2]. Используя преобразование a-b-c-d-q, сложность связанных электрических величин упрощается и упрощает моделирование. Это неотъемлемая часть теории обобщенных электрических машин, где все трехфазные машины можно рассматривать как двухфазные примитивные машины с фиксированными обмотками статора и вращающимися витками ротора. Контроллер преобразователя используется для управления напряжением постоянного тока установки РГ, реактивной мощностью и коэффициентом мощности. Контур управления может быть получен из соотношения между преобразователем и напряжением сети (рисунок 1).
Соотношение между сетевым напряжением u G и напряжением преобразователя u C0N , учитывая падение напряжения на индукторе в стационарной системе отсчета, можно записать в виде [3]
^0 = 1
л0 dr CONd
dt
+ ^G°.
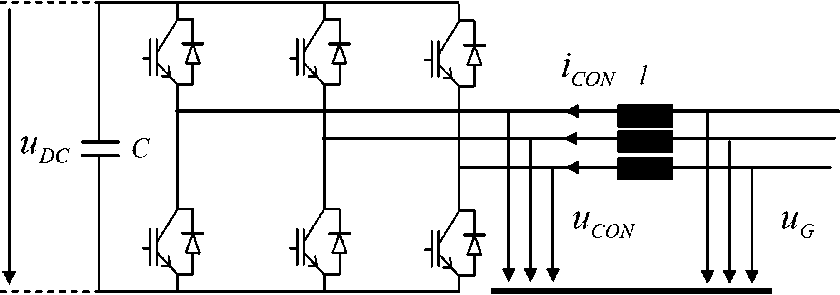
La Lb Lc
Рисунок 1 – Схема подключения к сети через сетевой индуктор
В системе координате α-β это напряжение сети может быть записано как
^ G° = U g 0. + rU G l 0-
После преобразования во вращающуюся систему отсчета при положительном направлении напряжения сети y^ug = ^ЛUg+j•^ЛUg.
Аналогично, ток преобразователя i C0N может быть записан в фиксированной системе отсчета как
iл0 = /л0 g0 о
LC0N = LC0Na + j uC0N^, и во вращающейся системе отсчета может быть выражен как
.Gug _ .лид лид
L CON = LC0Nd + j uC0Nq .
Реальная часть напряжения сети определяется выражением лид
Gu g dl coNd ли д ли д
^Gd = l dt ^l LC0Nq + uC0Nd, и мнимая часть может быть выражена как
^ид
—
лид д-тЛ^а
Ш1 l CON d + UCONq -
лид _ , di CONq
UGq = 1 dt
Перестраивая в уравнении напряжение преобразователя uCON, получим лид лид лид _ j dicONd лид
^CONd = aGd 1 dt + Ш1 lCONq’ лид лид = Лид _ / ^CONq _ . , -лид uCONq aGq 1 dt Ш1 lCONd-
В этой ориентированной системе отсчета вращающееся напряжение равно «лид = 1^1 и ucUa = ° - Несмотря на то, что u^^ = 0, выражение не исключается из уравнений для облегчения вывода уравнения управления.
Связь напряжения сети, напряжения преобразователя и тока преобразователя показана на векторной диаграмме (рисунок 2).
di лид di лид
Падения напряжения контроллера на индукторе I Со™й и I c°Nq рассматриваются как выхода ПИ-контроллеров (пропорционально - интегральный контроллер) и выражаются
/ dicOSNd _ 17 , 1 А . л^дд _ л^ид Л
L dt КР (1 + sT1) (lCONd_ref lCONdJ, лид diCONq 1 лид
_ л лид lCONq J.
1^Г = КР(1+^Т"1) (lCONq_ref ли лид
Заменяя выражение I —^^ на ^^oNd
л1лид и l-ico_
dt
на и лидч получим
лид 1 лид _ uCONd_ref ^PVstJ (lCONd_ref лид 1 лид
^ CONq_ref ^ Р (1 + ^tJ \ vCONq_ref
_ . лид лид лид lCONd) + uGd + Ш1 lCONq,
_ . лид лид лид lCONq) + uGq + Ш1 lCONd ’
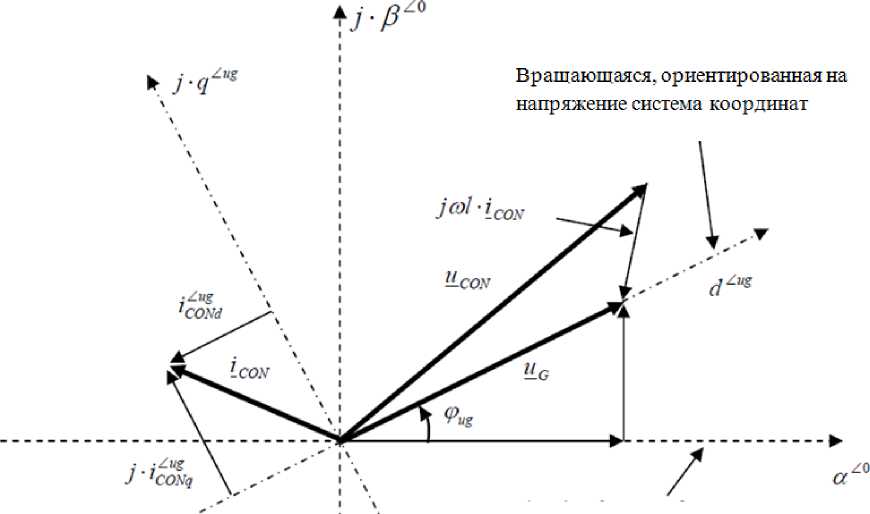
Фиксированная система координат
Рисунок 2 – Векторная диаграмма напряжения и тока в системе координат
d-q .
Внутренний цикл управления током контроллера преобразователя
может быть получен из уравнений и^а ref и u^Q^q Tef (рисунок 3).
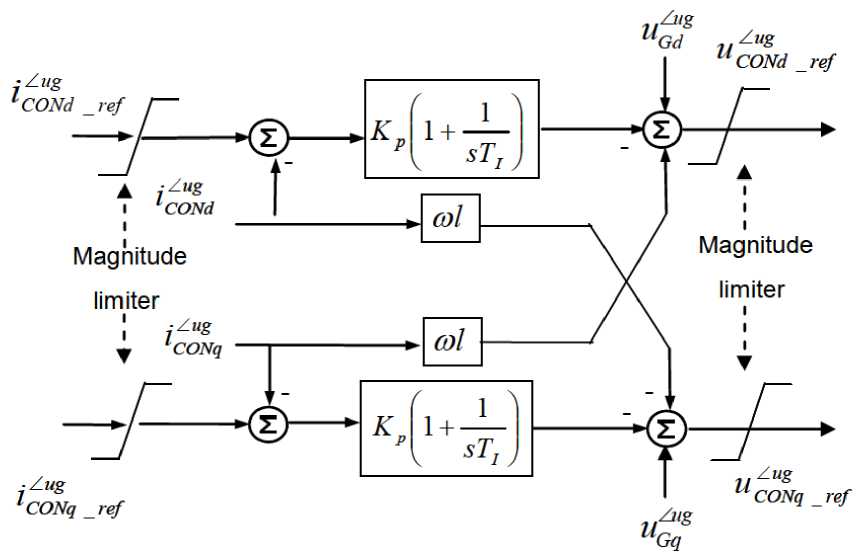
Рисунок 3 – Внутренний цикл контроля преобразователя.
В этой ориентированной по напряжению системе отсчета i CONa равно активному току, а i ^ONq - отрицательному реактивному току. Этот активный ток рассчитывается из контура управления, который управляет напряжением постоянного тока для d- составляющей, а реактивный ток генерируется тем, который управляет выходным напряжением переменного тока для q-составляющей (рисунок 4). Во внешнем цикле управления постоянный активный ток от источника РГ подается вперед для повышения производительности контроллера. Этот цикл основан на схеме управления P-Q, которая обеспечивает независимое управление активным и реактивным выходом мощности. Эти два контура управления представляют собой общую структуру контроллера для модели установки РГ, используемой для изучения различных проблем в данной работе.
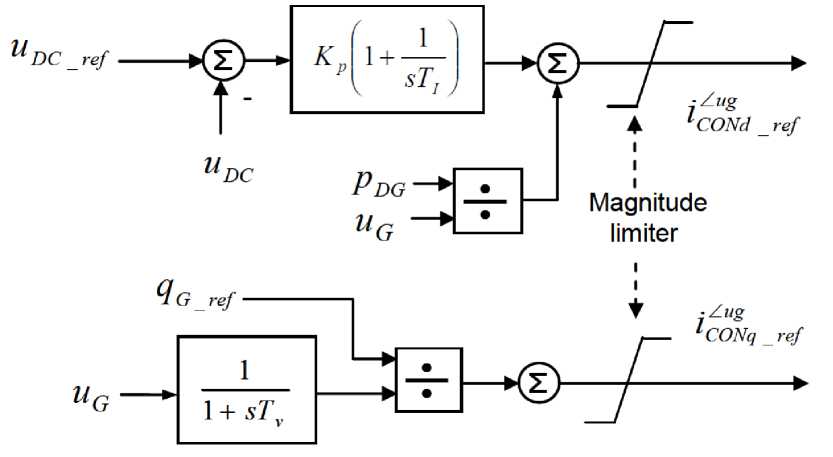
Рисунок 4 – Внешний цикл контроля преобразователя.
Список литературы Моделирование управления преобразователем в системе типа "сеть постоянного тока - сеть переменного тока"
- Recommended practices and requirements for harmonic control in electrical power systems, IEEE 519-1992.
- Eurelectric, Application guide to the European Standard EN 50160 on voltage characteristics of electricity suplied by public distribution systems, [Online], Available: http://www.eurelectric.org
- H. Akagi, E. H. Watanabe and M. Aredes, Instantaneous Power Theory and Application to Power Conditioning, Wiley-Interscience, 2007.
- B. K., Bose, Modern Power Electronic and AC drives, Prentice Hall, 2002.
- C. Feltes, S. Engelhardt, J. Kretschmann, J. Fortman and I. Erlich, "High voltage ride-trhough of DFIG-based wind turbine".
- T. C. Green and M. Prodanovic, "Control of inerter-based micro-grid," Electrical Power System Research, vol. 77, pp: 1204-1213, 2007.
