Моделирование влияния динамики углового движения колеса на вертикальные колебания транспортного средства

Автор: Лапшин Виктор Петрович, Кравец Виталий Сергеевич, Конев Сергей Александрович
Журнал: Advanced Engineering Research (Rostov-on-Don) @vestnik-donstu
Рубрика: Машиностроение и машиноведение
Статья в выпуске: 2 (81) т.15, 2015 года.
Бесплатный доступ
Целью работы является повышение эффективности управления транспортными средствами, поэтому помимо синтеза модели приведен пример анализа динамики современного пассажирского электровоза ЭП10. В качестве предмета работы выступают математические модели, отражающие динамику вертикального движения транспортного средства с учетом нелинейного преобразования углового движения колеса в поступательное движение центра масс колеса. Рассматривается контакт колеса и дороги. Представлен синтез модели, отражающей динамику вертикальных колебаний транспортного средства. От известных моделей приведенная в данной статье отличается тем, что в ней учтена динамика углового движения. Таким образом, полученная модель связана с координатами состояния углового движения колеса. Результаты анализа представлены фазовыми портретами, отражающими динамику вертикального движения центра масс колеса, а также динамику вертикальных колебаний кузова. Полученные результаты позволяют сделать следующий вывод. Существует связь между динамикой вертикального и углового движения в транспортном средстве. Как следствие, скорость углового движения влияет на длину площадки контакта колеса с дорогой (рельсом). Результаты могут быть применены при синтезе систем управления транспортными средствами, учитывающих выявленную связанность.
Динамика транспортного средства, площадка контакта, вертикальные колебания транспортного средства
Короткий адрес: https://sciup.org/14250145
IDR: 14250145 | УДК: 681.5.017+ | DOI: 10.12737/
Simulation of wheel angular movement dynamic impact on vehicle bouncing
As the subject of work, are mathematical mod-els that reflect the dynamics of vertical move-ment of the vehicle, taking into account the nonlinear transformation of the angular motion of the wheel in the forward movement of the center of mass of the wheel, the contact wheel and the road. The article provides a synthesis of models, reflecting the dynamics of vertical os-cillations of the vehicle. The difference of the present model from existing consists in taking into account the dynamics of angular motion, resulting in a model associated with the state coordinates the angular motion of the wheel. The aim of this work was to increase the effec-tiveness of the management of modern vehi-cles, so in addition to the synthesis model, the example analysis of the dynamics of a specific vehicle which was organized by the contempo-rary pas-passenger electric locomotive EP. The output of the analysis phase portraits reflecting the dynamics of the vertical motion of the cen-ter of mass of the wheel and the phase portrait, reflecting the dynamics of vertical oscillations of the body. In General, the obtained results allow to make infer-ence about the connectivity of the dynamics of vertical and angular move-ment in the TRANS-tailor the tool and, as a consequence, the effect of the rate of angular movement in the area of wheel contact with the road (rail). As the field of application of the results, see the synthesis of control systems of vehicles, taking into account the revealed relat-edness.
Текст научной статьи Моделирование влияния динамики углового движения колеса на вертикальные колебания транспортного средства
Введение. В настоящее время довольно остро стоит проблема удешевления железнодорожных и автотранспортных перевозок. Существенно сократить издержки в этой сфере позволит проектирование современных систем автоматического управления транспортными средствами, в контуре управления которыми нет человека. Для современных сложных динамических транспортных систем принципиальное значение приобретают вопросы построения моделей, опи-
–
—
Машиностроение и машиноведение
влияния динамики вертикальных колебаний центров масс транспортного средства на тяговые и скоростные характеристики процесса управления.
Задача синтеза модели, описывающей вертикальные колебания, не нова. Ее решению посвящено значительное количество работ — как о железнодорожной технике [6, 7], так и об автомобильной [8-11]. Отметим, что в этих моделях не учитывается взаимовлияние координат вращательного движения колеса и координат, описывающих вертикальное движение центра масс колеса и кузова транспортного средства. Вместе с тем, такое влияние подтверждено экспериментально [10, 11]. Это позволяет сделать вывод о необходимости математического описания данного явления. Итак, синтез качественной модели, отражающей указанную связь, является актуальной научной и практической задачей, чему и посвящен представленный материал.
Модель динамики вертикальных колебаний. При построении моделей, описывающих сложную динамику систем управления, часто возникает противоречие между требованием к точности модели и ее сложности. Однако для качественного анализа основных форм колебаний в транспортном средстве достаточно принять двухмассовую модель, которая в упрощенном виде представлена на рис. 1.
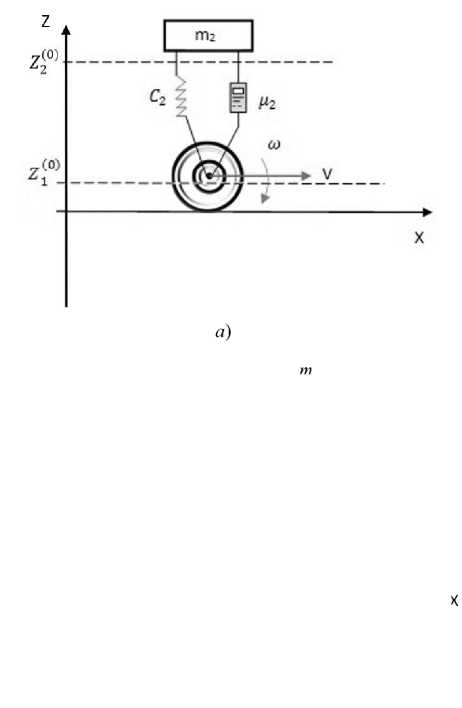
Рис. 1. Модель динамики транспортного средства: в координатах состояния (а ); упрощенная двухмассовая модель (б)

На рис. 1 m i , m 2 — массы колесной пары и кузова соответственно; c 1 , c 2 — характеристики жесткости колеса и подвески соответственно; р 1, Ц2 —коэффициенты, характеризующие диссипацию в колесе и в подвеске соответственно. Горизонтальной пунктирной линией отмечены уровни, соответствующие положению статического равновесия центра масс кузова и колеса. Начало отсчета поместим на этих уровнях, а ось 0 z будет направлена вверх. Если центр масс кузова или колеса находится выше положения статического равновесия, то их координаты z 1 , z 2 > 0, если ниже, то z 1 , z 2 < 0. С точки зрения анализа вертикальных колебаний транспортного средства, возникающих в нормальной плоскости, удобно представлять колесо в виде упруго-жесткой связи. Так, к примеру, делают при решении задач моделирования в автомобильной технике [8-11].
Значение деформации подвески с достаточной степенью точности можно определить как:
М, = 5 0 ,
2 стат.2 2 1 , mg гДе S^.2 =—--статическая осадка пружины подвески под действием силы тяжести. c 2
Для построения модели, отражающей динамику вертикальных колебаний центров масс колеса и кузова автомобиля, используем широко известный подход, предполагающий использование уравнения Лагранжа второго рода [4]. Однако при этом примем в расчет влияние времени существования контакта. Для этого с учетом направления осей z 1 , z 2 введем дополнительную функцию, отражающую эффект «всплывания колеса», который проявляется при увеличении скорости вращения. Подобный эффект достаточно хорошо изучен в динамке металлорежущих станков. Например, в [12, 13] этот эффект объясняется гидродинамической составляющей сил, возникающих в зоне контактирующих поверхностей. В рассматриваемом случае учитывается существование контакта не только в режиме относительного скольжения колеса, но и в режиме качения. Поэтому «всплывание колеса» можно объяснить тем, что контакт колеса и дороги формируется не мгновенно, а в течение некоторого времени. Под временем формирования контакта колеса и дороги мы понимаем время, которое будет потрачено на деформацию в нормальной плоскости колеса. Обозначим время формирования контакта, которое также является и временем существования контакта, величиной А t Не вдаваясь в глубокий анализ процессов, происходящих в зоне контакта при сближении поверхностей колеса и дороги, отметим, что существует некоторое эффективное значение А tk. , при котором сцепление колеса и дороги достигает некоторого максимального значения и при котором деформация колеса в нормальной плоскости останавливается.
С учетом вышеизложенного и при условии, что А t <А tк, значение деформационных изменений колеса в нор
:
А l1 ^ стат.1 z1 f (Аt), где f (Аt) — некоторая неизвестная функция, учитывающая влияние времени существования контакта на величину
( m 1 + m 2) g 12 —
деформационных изменений колеса в нормальной плоскости, а 5.1
ка) колеса под действием веса кузова и колеса. Если А t >А t к, ТО
А l1 ^стат.1
При А t < А t к будут справедливы два следующих предела:
lim f ( А t) ^ ^стат .1, lim f (Кt)0.
А t ->Д tk
С достаточной степенью точности такое изменение f (Д t ) можно описать при помощи следующей функции:
Подставим (4) в (1) получим:
f (А t ) ^ стат .1
_А tk
1 -е 4t
.
А tk
Д l, = 8_,еА t — 7
1 истат .1 1 .
Для дальнейшего анализа уравнения (5) выразим А t и А t к в координатах состояния. Для этого рассмотрим зависимость времени существования контакта от длины площадки контакта и скорости углового движения колеса.
Пусть R — радиус колеса; 6 — угол между двумя прямыми, соединяющими центр колеса с двумя противоположными краями площадки контакта; А l 1 — величина, характеризующая степень деформации колеса, под действием нормально приложенной нагрузки (5); L — формируемая длина площадки контакта.
С учетом принятых обозначений можно определить угловую величину сектора колеса, принимающего участие в контакте — 6. Для этого найдем L :
L 2А l 1(2 R -А l 1) , (6)
а затем, используя известные тригонометрические соотношения, определим значение 6:
. е_А l 1(2 R -А l 1) sin 1 1
со R
Для железнодорожной техники угол 9/2 достаточно мал. С учетом этого, используя известную теорему о предельном значении бесконечно малых величин, будет справедливо:
Машиностроение и машиноведение
Э- 2■А l 1(2 R -А l 1) . со
Время формирования площадки контакта можно связать с ее угловой характеристикой (8) и скоростью вращения колеса следующим образом:
, е t ,
—
—
t
L
— t
.
t — t
V
.
l 1
f ( l 1 )
f ( l 1) K R l 1,
KR f l 1 l1
R = 0,5 KR 14):
2K l t R1
R
.
t k Vk
Преобразуем выражение (5) к виду
k
1 .1 1 .
Как видно из (12), от скорости вращения колеса зависит степень его деформации под действием нормально приложенной нагрузки. Это позволяет говорить о взаимосвязанности динамики углового движения колеса (колесной пары в железнодорожной технике) и динамики вертикального колебательного движения в нормальной плоскости центров масс колеса и кузова.
z 1 , z 2
k
1 .1 1,
А — 5 о — z-, ~V" z,.
2 .2 2 1.
Уравнение Лагранжа, описывающее динамику взаимосвязанного движения центров масс кузова и колеса в нормальной плоскости, примет следующий вид:
d2z dz dz m 2 2 cz 1 cz,
2 dt 2 2 dt 2 2 2 dt 2 1
d2z dz dz m1 dt21 ( 1 2) dt1 (c1 c2)z1 c2z2 2 dt2
g ( m m )(1 e k ) 1 .1 e k d .
1 2 k dt
Система (14) описывает динамику вертикального движения центров масс кузова и колеса. Отметим, что, если угловое движение отсутствует, то последние два члена второго уравнения системы будут равны нулю, и система (14) преобразуется к линейному виду. – — —
Кроме того, с учетом связи через проскальзывание в данном случае принимается во внимание и поступательное движение.
Результаты численного моделирования. Проанализируем динамику вертикальных колебаний, описываемых системой (14). Для этого в качестве параметров уравнений, входящих в систему, подберем величины, соответствую- m 2 = 50000
c 2 = 1 107 Н/м; ц2 = 40000 Н/(м/с); m 1 = 300 кг; c 1 = 1,6 107 Н/м; ц1 = 4000 Н/(м/с). Тогда значение 5стат .1 = 0,0314 м; ^стат .2 = 0,05 м; Kстаб. примем равным 0,99; го k = 40 рад/с (72 км/ч) при R = 0,5.
Для проведения эксперимента по оценке динамики транспортного средства в качестве возмущающего воздействия использовались изменения начальных условий по координате z 1. То есть моделировалась неровность дороги (рельса), при этом скорость вращения колеса совершала колебания относительно некоторого стационарного значения, что может соответствовать порывам встречного ветра. Результаты моделирования вертикальной реакции колеса представлены рис. 2, 3.
dz 1 dt
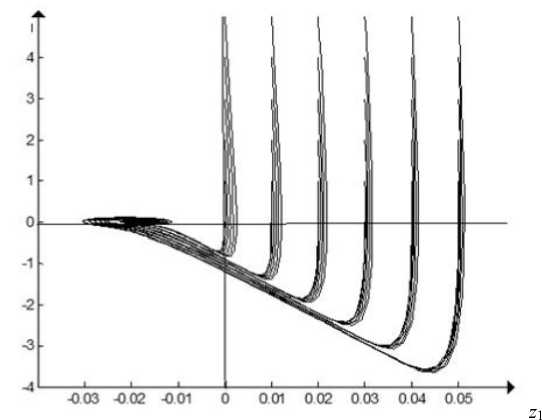
Рис. 2. Фазовый портрет колебательного движения центра масс колеса при V = 72 км/ч
Реакция на возникающие неровности, представленная фазовым портретом на рис. 2, носит колебательный характер. Взяты значения встречающихся неровностей, не превышающие степень статической деформации колеса ( ^стат .1= 0,0314м). Однако, как видно из рис. 2, при увеличении скорости транспортного средства на неровной поверхности возможна потеря контакта колеса с дорогой. Из опыта эксплуатации транспортных систем известно, что на неровной дороге транспортное средство должно уменьшать свою скорость. В противном случае возможна потеря управляемости. Для проверки адекватности модели мы увеличили скорость. Результаты моделирования системы представлены на рис. 3.
dz 1 dt
z 1
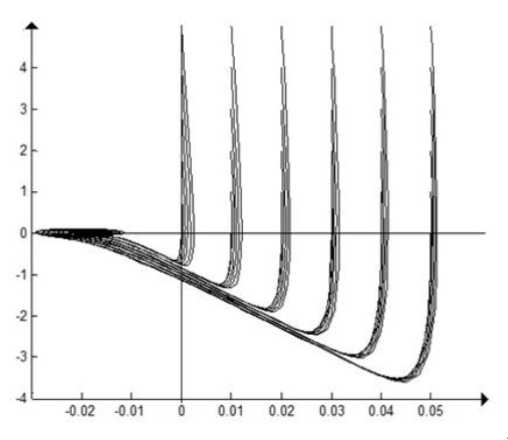
Рис. 3. Фазовый портрет колебательного движения центра масс колеса при V = 135 км/ч
Машиностроение и машиноведение
Как видно из рис. 3, с увеличением скорости движения транспортного средства растет вероятность потери управления (контакта колеса с дорогой) на неровной поверхности. Таким образом, адекватность принятой модели подтверждается.
Кузов транспортного средства тоже реагирует на возникающие неровности. Результатом такой реакции должны быть колебания центра масс кузова. Эффект «всплывания» колеса при увеличении скорости движения определяет сложный характер этих колебаний. С точки зрения проверки адекватности модели, правильно давать приращения ко- z1
z 2
ва от величины возникающих на пути неровностей. Результаты моделирования вертикальных колебаний кузова транспортного средства представлены на рис. 4.
dz 2 dt
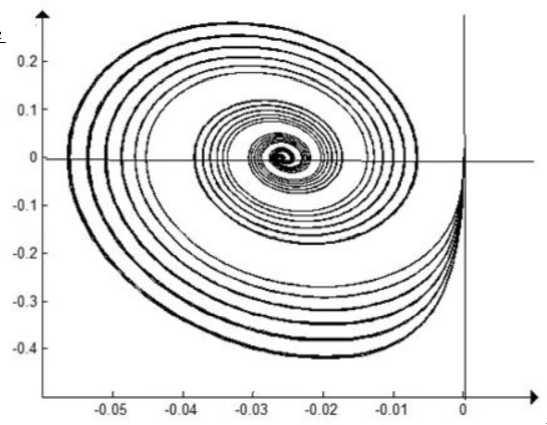
Рис. 4. Фазовый портрет колебаний кузова
z 2
Как видно из рис. 4, кузов транспортного средства совершает более сложное колебательное движение, чем колесо. Однако в отличие от динамики вертикальных колебаний центра масс колеса, центр масс кузова меньше реагирует на колебательные изменения скорости движения транспортного средства, то есть колебания затухают.
Заключение. Представленная в статье модель позволяет численно определять степень влияния скорости транспортного средства на динамику вертикальных колебаний центров масс кузова и колеса. Это позволит проектировать сложные системы управления движением транспорта. Результаты численного моделирования позволяют сделать вывод об адекватности принятой модели. Колебательный характер нарастания скорости транспортного средства обусловливает колебательный характер движения центра масс колеса вблизи равновесного состояния. При увеличении скорости движения увеличивается «всплывание» колеса и отмечается некоторый подъем кузова. При синтезе модели
—
2– не только весом, но и упругой силой, связанной с деформацией пружины подвески. Отметим, что рассматриваемый – в работе модель приводиться впервые.
В качестве дальнейшего развития предлагаемого подхода авторы рассматривают синтез связанной модели колебательного движения всего транспортного средства с учетом взаимодействия углового и поступательного движения колеса при проскальзывании.
Список литературы Моделирование влияния динамики углового движения колеса на вертикальные колебания транспортного средства
- Лапшин, В. П. Модель связи вертикальных деформаций с возникновением циркуляционных сил в системах «колесо -рельс»/В. П. Лапшин//Вестник Дон. гос. техн. ун-та. -2011. -Т. 2, № 8 (59). -С. 1424-1431.
- Туркин, И. А. Модель связи упруго-вязкого смещения поверхности колеса относительно рельса с тяговыми характеристиками/И. А. Туркин, С. В. Носачев, В. П. Лапшин//Вестник Дон. гос. техн. ун-та. -2012. -Т. 12, № 5 (66). -С. 40-49.
- Заковоротный, В. Л. Проблемы динамики транспортных трибосистем/В. Л. Заковоротный, В. А. Шаповалов//Сборка в машиностроении, приборостроении. -2005. -№ 12. -С. 19-24.
- Заковоротный, В. Л. Исследование комплексного коэффициента трения/В. Л. Заковоротный, В. А. Шаповалов//Трение и износ. -1987. -Т. 9. -№ 12. -С. 722-728.
- Заковоротный, В. Л. Исследование динамических характеристик машины с учетом нелинейности процессов трения/В. Л. Заковоротный, В. А. Шаповалов//Трение и износ. -1986. -Т. 7, № 4. -С. 681-685.
- Обобщение передового опыта тяжеловесного движения: вопросы взаимодействия колеса и рельса/У. Дж. Харрис . -Москва: Интекст, 2002. -408 с.
- Теория электрической тяги/В. Е. Розенфельд . -Москва: Транспорт, 1995. -294 с.
- Яценко, H. H. Поглощающая и сглаживающая способность шин/H. H. Яценко. -Москва: Машиностроение, 1978. -131 с.
- Жуков, A. B. Исследование колебаний автомобилей при переезде неровностей на режимах торможения или разгона/A. B. Жуков//Автомобильная промышленность. -1973. -№ 2. -С. 21-25.
- Поросятковский, В. А. Исследование параметров вертикальных колебаний автомобильной шины и их влияние на сопротивление качению колеса по грунту: дис. … канд. техн. наук/В. А. Поросятковский. -Киев, 1974. -217 с.
- Смирнов, Г. А. Теория движения колесных машин/Г. А. Смирнов. -Москва: Машиностроение, 1990. -352 с.
- Кудинов, В. А. Динамика станков/В. А. Кудинов. -Москва: Машиностроение, 1967. -359 с.
- Крагельский, И. В. Фрикционные автоколебания/И. В. Крагельский, Н. В. Гитис. -Москва: Наука, 1987. -182 с.
- Interrelation between tribosystem evolution and parameters of dynamic friction system // V. L. Zakovorotny [et al.] // Journal of Friction and Wear. - 1998. - Т. 19. - № 6. - P. 54-64.
- Zakovorotny, V. L. Mathematical modelling and control of the evolution of dynamic systems interacting with medium/V. L. Zakovorotny, Nguyen Dong Anh, Pham Dinh Tung//Vietnam Journal of Mechanics. -2011. -Vol. 33, № 3. -P. 148-161.
- Kuznetsov, E. A. Effect of Fluid Lubricant on the Contact Characteristics of Rough Elastic Bodies in Compression/E. A. Kuznetsov//Wear. -1985. -Vol. 157. -P. 177-194.
- Ben-David, O. Slip-Stick and the Evolution of Frictional Strength/O. Ben-David, S. M. Rubinstein, J. Fineberg//Nature. -2010. -V. 463, № 7277. -P. 76-79.
