Моделирование выхода танкера в условную точку по заданной траектории

Автор: Юдин Ю.И., Юдин А.Ю., Мартюк Г.И.
Журнал: Вестник Мурманского государственного технического университета @vestnik-mstu
Статья в выпуске: 2 т.9, 2006 года.
Бесплатный доступ
Для осуществления погрузки нефти в условиях открытого моря танкер должен выйти по заданной траектории в условную точку соединения приемного устройства танкера с трубопроводом, по которому осуществляется подача нефти с береговых или подводных накопительных емкостей. С учетом особенностей управления судном, осуществляющим движение по заданной траектории, наиболее приемлемой траекторией сближения танкера с условной точкой можно считать кривую погони. В статье представлены результаты моделирования процесса выхода танкера в условную точку по кривой погони, при наличии в районе маневрирования внешних возмущающих воздействий (ветер, волнение, течение).
Короткий адрес: https://sciup.org/14293713
IDR: 14293713
Текст научной статьи Моделирование выхода танкера в условную точку по заданной траектории
Движение танкера по заданной траектории является сложно управляемым процессом. Это обусловлено прежде всего недостаточной технической обеспеченностью танкера автоматическими или автоматизированными средствами управления, а также средствами контроля положения танкера относительно заданной траектории. Однако среди множества траекторий, которые могут рассматриваться как заданные, есть такие, движение по которым может быть реализовано с помощью имеющихся в настоящее время на судах технических средств. В частности, установленная на танкерах типа "Астрахань" компьютерная система для обеспечения постановки танкера к приемному устройству и дальнейшего контроля за его положением во время выполнения грузовой операции может быть использована для выполнения движения танкера по заданной траектории сближения. При этом в качестве траектории выхода танкера в условную точку (УТ) может выступать любая из известных классических траекторий сближения, а именно:
-
1) кривая погони, основным правилом движения по которой является удержание объекта сближения на нулевом курсовом угле;
-
2) кривая постоянного угла упреждения – траектория танкера, осуществляющего выход к объекту сближения, удерживая его на постоянном курсовом угле;
-
3) кривая пропорционального сближения, когда угловая скорость вращения танкера пропорциональна скорости вращения линии, соединяющей танкер и объект сближения (линия визирования).
В данном случае наиболее подходящей для осуществления выхода танкера в условную точку траекторией сближения является кривая погони ( Локк , 1958). Алгоритм управления судном при движении его по кривой погони достаточно прост. В соответствии с алгоритмом необходимо выполнять регулирование курса танкера с учетом положения его диаметральной плоскости относительно обозначенного для визуального наблюдения объекта сближения. Визуально объект сближения, в нашем случае условную точку, можно наблюдать на экране монитора компьютерной системы постановки танкера к приемному устройству. В районе швартовки работает дифференциальная GPS-система, которая позволяет с предельно возможной для нее точностью отобразить на экране монитора любую желаемую точку в соответствии с ее координатами, определяемыми с учетом фиксированных координат места подсоединения танкера (МПТ) к нефтепроводу и пеленга с МПТ на УТ. Пеленг на УТ будет совпадать с линией расположения шланга-швартова.
Очевидным преимуществом предлагаемого нами способа выхода в УТ является отсутствие у судоводителя необходимости определять и учитывать параметры суммарного сноса танкера под воздействием ветра, волнения и течения. В качестве ограничений при использовании кривой погони для выхода в УТ могут рассматриваться следующие факторы: – наличие навигационных опасностей в районе швартовки;
-
– относительная исходная позиция танкера;
-
– управляемость танкера при движении по заданной траектории в условиях воздействия ветра и волнения;
– технические возможности рулевого устройства, прежде всего ограничения по углу перекладки руля;
– значения кинематических параметров, удовлетворяющие требованиям управляемости судна в конечной точке сближения.
Следовательно, для оценки возможности использования предлагаемого способа сближения необходимо провести модельные эксперименты, которые должны дать ответы на следующие вопросы:
-
1) существуют ли ограничения в выборе относительной начальной исходной позиции танкера;
-
2) какова величина предельных значений скорости ветра и его направления, а также балльности волнения, при которых танкер, движущейся в УТ с малой скоростью, сохранит управляемость;
-
3) каковы предельные значения угла перекладки руля при движении танкера по кривой погони с учетом начальных условий сближения;
-
4) какие значения имеют кинематические параметры движения танкера во время сближения, особенно в момент его завершения.
-
2. Законы изменения курса танкера и дистанции между танкером и УТ
Для модельных экспериментов по выходу танкера в УТ будем использовать систему координат, приведенную на рис. 1.
Значения координат танкера можно представить в виде зависимостей x = xут – D sinψ; y = yут – Dcosψ. (1)
При этом очевидно, что
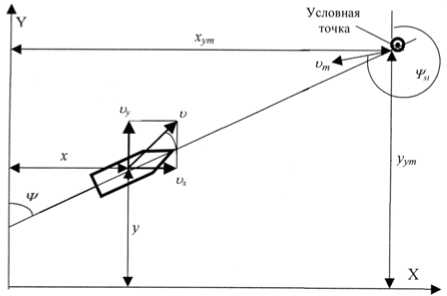
Рис. 1. Система координат
dx / dt = υ sin( ψ – β ) + υ т sin ψ st ;
dy / dt = υ cos( ψ – β ) + υ т cos ψ st .
Переменными величинами в уравнениях (1) и (2) являются: дистанция D до УТ; курс танкера ψ ; угол дрейфа танкера β . Значение угла дрейфа определяется при решении уравнений движения танкера. Для нахождения значений дистанции D и курса ψ определим законы их изменения во времени.
Закон изменения дистанции может быть получен, если спроецировать векторы скорости танкера и течения на линию визирования. Тогда dD/dt = – [υ cosβ + υт cos(ψ – ψst)].(3)
Закон изменения курса танкера при движении по кривой погони найдем, дифференцируя уравнение tgψ = x/y.(4)
при х ут = у ут = 0.
В результате с учетом уравнений (1) и (2) будем иметь dψ/dt = {υ [sin(ψ – β) cosψ – cos(ψ – β)sinψ] + υт [sinψst cosψ – cosψst sinψ]}/D.(5)
или после несложных преобразований dψ/dt = – [υ sinβ + υт sin(ψ – ψst)]/D.(6)
Полученный таким образом закон изменения курса танкера позволяет нам определить значение заданного курса в любой точке траектории сближения. Вычисленное значение ψ зад используется для формирования сигнала управления рулевой машиной σ , который аналитически может быть представлен в виде зависимости
σ = a 1 ( ψ зад – ψ ) + a 2 ( d ψ / dt ) + a 3 (180 + ψ st – ψ ). (7)
Последний член в правой части уравнения (7) обеспечивает формирование сигнала управления с учетом условия выхода танкера в УТ с курсом, противоположным направлению течения в районе швартовки. Значения коэффициентов а 1 , а 2 , а 3 в уравнении (7) выбраны в соответствии с рекомендациями А.Ш. Афремова и Н.А. Смолина ( Справочник , 1985). В нашем случае а 1 = -1,0; а 2 = -10,0; а 3 = -0,5.
-
3. Закон изменения угла перекладки руля
Закон изменения угла перекладки руля αr(t) для движения судна по заданной траектории определим, исходя из предположения, что управление рулем производится в автоматическом режиме, сигнал управления, вырабатываемый авторулевым, выражается уравнением (7). Угол перекладки руля в зависимости от управляющего сигнала σ изменяется в соответствии с законом, аналитически записываемом в виде (по материалам экспериментов, опубликованных в (Березин, 1974)):
α R ', если | α R ' | < 0,610865;
α R = + 0,610865, если α R ' > 0,610865; (8)
– 0,610865, если α R ' < -0,610865.
f ( σ ), если | α R ' | ≤ 0,610865;
d α R '/ dt = f ( σ ), если α R '∙ σ ≤ 0, | α R ' | > 0,610865; (9)
-
0, если α R '∙ σ > 0, | α R ' | > 0,610865.
-
0, если | σ | ≤ 1,74∙10-2;
-
4. Анализ результатов моделирования
Для выполнения модельных экспериментов использована идентифицированная математическая модель танкера типа "Астрахань", полученная в работе ( Степахно , 2005). На ее базе нами были выполнены модельные эксперименты по осуществлению выхода танкера в УТ с использованием рассматриваемой здесь траектории сближения. Основная цель эксперимента – оценка возможности выхода танкера в условную точку при различных сочетаниях начальных условий движения. Выбор начальных условий и их сочетаний был предопределен задачами, поставленными выше. В реально возможных пределах варьировались следующие параметры: скорость судна υ ; скорость течения υ т ; исходная позиция танкера по отношению к направлению нефтепровода; начальный курс танкера; начальная дистанция между УТ и танкером; направление q а и скорость ветра υ а ; направление q w и балльность волнения; состояние загрузки танкера (преимущественно в балласте, так как подход к месту швартовки осуществляется для приема нефти). В отличие от остальных параметров, направление течения ψ st имело постоянное значение, т.е. ψ st = 0. Влияние мелководья не рассматривалось, так как с учетом результатов анализа, выполненного в работе ( Мартюк и др ., 2004), при малых скоростях мелководье на динамике движения танкера практически не сказывается. Всего было выполнено около 40 модельных экспериментов.
σ , если | σ | > 1,74∙10-2;
f ( σ ) = + 4,71∙10-2, если | σ | > 4,71∙10-2 и σ > 0;
– 4,71∙10-2, если | σ | > 4,71∙10-2 и σ < 0. (10)
Числовые значения параметров, входящих в выражения (8-10), определяются тактико-техническими характеристиками авторулевого АР 2000 Trackpilot, установленного на танкерах типа "Астрахань".
Результаты моделирования были представлены в виде траекторий движения танкера по кривой сближения и графиков зависимостей основных параметров, отражающих характер движения танкера и его положение на заданной траектории ψ ( t ), D ( t ), ψ зад( t ), β ( t ), α r ( t ); значение угловой скорости в момент выхода танкера в УТ фиксировалось отдельно. Ввиду достаточно большого объема экспериментального материала невозможно представить весь материал в рамках объема журнальной статьи, поэтому здесь приведены только наиболее типичные результаты моделирования. Например, на рис. 2 показаны траектории выхода танкера в УТ с различных начальных позиций.
На рис. 3 приведены графики изменения основных параметров движения в процессе сближения для случая 1 (рис. 2).
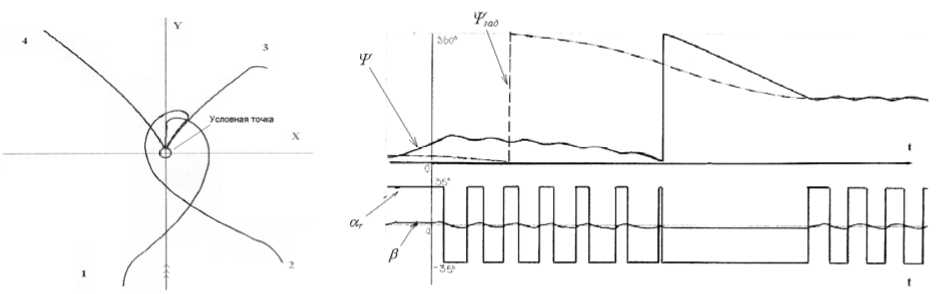
Рис. 2. Траектории подхода танкера к УТ из четырех начальных позиций: 1, 2, 3, 4 ( υ = 2 м/с, υ т = 1 м/с, ψ st = 0°)
Рис. 3. Изменения курса танкера ψ и направления ψ зад на УТ (верхний график); изменение угла перекладки руля α r и угла дрейфа β (нижний график)
Таблица
|
Начальная позиция танкера по рис. 2 |
Начальные значения параметров движения танкера |
Конечные значения параметров движения танкера |
||||
|
Направление танкер ^ УТ, У зад , град |
Курс танкера у , град |
Дистанция танкер ^ УТ D , м |
Направление танкер ^ УТ, У зад , град |
Курс танкера у , град |
Дистанция танкер ^ УТ D , м |
|
|
1 |
15 |
10 |
1500 |
181 |
176 |
50 |
|
2 |
318 |
321 |
1620 |
196 |
195 |
50 |
|
3 |
226 |
257 |
1319 |
226 |
207 |
50 |
|
4 |
140 |
145 |
1744 |
165 |
174 |
50 |
В таблице содержатся начальные и конечные значения основных параметров движения по всем начальным позициям танкера. В ней не нашли отражение следующие начальные значения параметров: скорость танкера и = 4 уз, скорость течения в районе маневра u m = 2 уз; направление течения совпадает с положительным направлением оси Y . В рассматриваемом случае моделирование проводилось в условиях отсутствия воздействия внешних факторов (ветер, волнение), а загрузка танкера соответствовала состоянию танкера в балласте.
Конечное значение угла дрейфа в во всех случаях равно нулю, значения угловой скорости танкера при выходе в УТ: 1 - 0; 2 - 1,745 - 10 —3 ; 3 - 2,618 - 10-3; 4 - 1,222 - 10-3 град/с.
Важным фактором, который необходимо учитывать при выборе исходной позиции для выполнения сближения, является соотношение скоростей танкера и течения. В связи с этим необходимо отметить, что, если их отношение находится в пределах 1,0 < u / u m < 2,0, что наиболее вероятно в реальных условиях, угловая скорость танкера в момент окончания сближения стремится к нулю ( о ^ 0). При этом относительное исходное положение танкера значения не имеет. Однако при выходе значений отношения и/ит из указанных пределов существенно ограничивается диапазон возможных исходных позиций танкера. Например, если выполняется условие 2,0 < и/и т < 3,0, выход танкера в УТ из позиций 1, 2 (см. рис. 2) становится невозможным из-за существенной разницы значений, с одной стороны, направлений линии визирования, с другой – курса танкера, а также из-за большого значения угловой скорости танкера в конечной точке сближения - 0,8 < о < 2,0 град/с.
Безопасным в момент выхода танкера в УТ считается курс, отличающийся от направления нефтепровода не более чем на 10°.
Возможность безопасного выхода танкера в УТ из позиций 3, 4 ограничена соотношением скоростей и / u m только при определенном сочетании начального курса танкера у 0 и начальной дистанции между танкером и УТ D 0 . Если 1,0 < u / u m < 3,0, а начальная дистанция D 0 > 1,0 мили, то для того, чтобы сближение состоялось и было безопасным, значение начального курса у 0 может находиться в достаточно больших пределах, а именно y st < у 0 < ( y st + 180 ° ). При уменьшении начальной дистанции увеличивается разность между курсом танкера в момент его выхода в УТ и направлением линии расположения нефтепровода (совпадает с направлением течения y st = 0 ° ).
Наличие ветра в районе швартовной операции не вносит серьезных коррективов в тактику выхода танкера в УТ. В данном случае необходимо учитывать влияние соотношения между скоростью судна u и скоростью ветра u a на управляемость судна. Значение указанного соотношения ограничивается по соображениям соблюдения устойчивости танкера на курсе в последней стадии швартовки. В пределах рассчитанных ниже ограничений танкер способен выполнять выход в УТ по кривой погони.
Необходимо отметить, что, во-первых, наличие волнения в районе швартовной операции существенно затрудняет выход танкера в УТ при u < 5 уз; во-вторых, однозначно исключается выход на швартовку, если направление бега волн противоположно направлению течения, при этом опасный сектор направлений бега волн определяется значениями курсовых углов волнения при 130 ° < q w < 250 ° в круговой системе счета. Однако влияние волнения заметно только при его балльности выше 4. Возможно, что при рассмотрении танкеров с большим водоизмещением границы допустимой балльности будут расширены. Учитывая, что рабочий диапазон скоростей швартовки находится в пределах 1,5 < u < 4,0 уз, и используя результаты моделирования швартовной операции в условиях волнения, можно сделать вывод, что ее выполнение в безопасном режиме возможно только при волнении не более 5 баллов. Это не значит, что выполнить швартовку при большей балльности волнения невозможно, однако такая швартовка будет сопряжена с определенными трудностями, например, такими, как высокая вероятность ухода танкера с траектории сближения, а также потеря управляемости на последнем этапе швартовки. Наглядно потеря управляемости на траектории сближения показана на рис. 4. Характерно, что в данном случае выбран наиболее благоприятный курс по отношению к направлению бега волн.
Рис. 4. Потеря устойчивости движения танкера при 6-балльном волнении ( υ = 2 м/с, υ а = 22 м/с, υ т = 0,5 м/с, q a = q w = 60о пр/б, h 3 % = 4,9 м)
Условная точка
-
5. Заключение
Анализ результатов моделирования процесса сближения танкера с УТ позволяет считать приемлемым использование кривой погони для осуществления выхода танкера в МПТ, т.к. при минимальных ограничениях условий безопасного выполнения швартовной операции её выполнение легко реализуется существующими средствами и методами управления танкером.
