Моделирование зубофрезерования цилиндрических зубчатых колес

Автор: Браилов И.Г., Андросов С.П.
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Механика и промышленность
Статья в выпуске: 5-2 т.11, 2009 года.
Бесплатный доступ
Рассматривается вопрос моделирования зубофрезерования цилиндрических зубчатых колес. Определены векторные зависимости, описывающие профили зубьев заготовки зубчатого колеса и червячной модульной фрезы, а также их относительные движения в пространственном отображении.
Моделирование, зубчатое колесо, зубофрезерование, червячная модульная фреза
Короткий адрес: https://sciup.org/148198719
IDR: 148198719 | УДК: 621.914.5.001.891.57
Modeling of the gear-tooth milling of cylindrical gear wheel
The question of modeling of the gear-tooth milling of the cylindrical gear wheel is considered. Vector de-pendencies, describing the design of section of teeth of the subproducts of cylindrical gearwheel and worm gear hob are specified, and also their relative motion in the 3D dimensional image is demonstrated.
Текст научной статьи Моделирование зубофрезерования цилиндрических зубчатых колес
координат X ф Y ф Z ф фрезы 2, совершающей вращательное движение с угловой скоростью ω ф и поступательное движение подачи со скоростью V 1 . На этом рисунке изображены векторы, определяющие взаимодействие заготовки 1 и фрезы 2 в процессе зубофрезерования, а также векторы, описывающие эвольвентный профиль зуба нарезаемого колеса и зуба фрезы.
Рис.1. Система координат
Векторное уравнение процесса зубофрезерования имеет вид:
Гок + Гз + Гэ + r = Гоф + Гпод + r n + Гф ,
где rз – вектор, отождествляемый с шириной заготовки; rок – вектор, определяющий базовую установку заготовки в приспособлении, которое используется при зубообработке; rэ – векторная функция эвольвенты; rф – вектор, определяющий точку на зубе модульной фрезы; rоф – вектор, определяющий начальное положение системы координат фрезы в системе координат станка; rпод – вектор подвода фрезы в начальную точку обработки; rп – вектор подачи фрезы в процесс фрезерования; rф – вектор, определяющий точку на зубе модульной фрезы; r – замыкающий вектор между точкой эвольвенты и точкой на зубе фрезы.
Каждый вектор может быть записан в координатной форме. Например, вектор rок в принятой системе координат станка запишется :
r ок
0 h пр
где hпр – высота опорной плоскости, на которую устанавливается заготовка 1 относительно стола 2 станка (рис. 2). Вектор r3 в координатной форме выражается функцией rз
B
где В – ширина венца нарезаемого зубчатого колеса.
Векторная функция эвольвенты rэ в системе координат X к Y к Z к заготовки записывается в следующем виде [3]:
rэ
R sin ф — R ф cos ф
R cos ф_ R ф sin ф
где R – радиус основной окружности; φ – угол поворота прямой вокруг оси зубчатого колеса, соединяющей его центр и точку касания производящей прямой, обкатывающейся по основной окружности.
Вектор r является замыкающим звеном при обкатке. В процессе моделирования зубо-обработки он может быть равен нулю в тот момент, когда происходит профилирование эвольвенты. При этом точка, принадлежащая боковой режущей кромке фрезы, находится в полюсе зацепления эвольвентного профиля зуба колеса и производящей рейки. Большинство точек фрезы последовательно проходят полюс профилирования. Исключение составляют точки вблизи вершины зуба фрезы, которые при обкатке формируют переходную кривую ножки зуба колеса или кривую подрезания. Периферийная режущая кромка зуба фрезы формирует только впадину между зубьями. В каждом случае профилирование всех участков нарезаемых зубьев происходит в плоскости, перпендикулярной оси заготовки, и на кратчайшем расстоянии от рассматриваемой точки фрезы по оси заготовки. В остальные моменты происходит съем металла впадины между зубьями заготовки. Другими словами, съем металла происходит в объеме, заключенном между боковыми поверхностями зубьев во впадине и между торцевыми поверхностями заготовки. При этом объемы снимаемого металла при начальном врезании фрезы в заготовку и при полном врезании отличаются между собой.
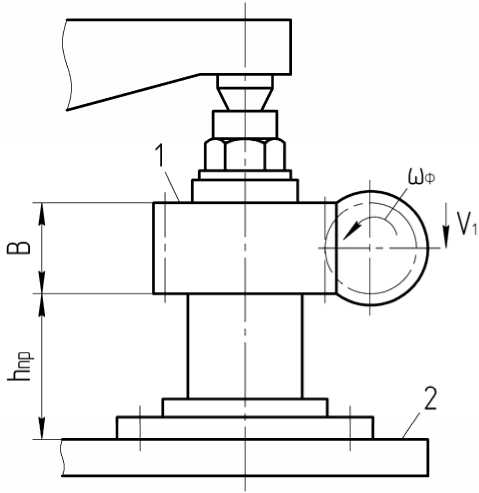
Рис. 2. Установка заготовки в станке
Вектор подвода rпод определяется следующим выражением r . под
— V t
где V – скорость подвода фрезы в начальную точку обработки; t – время подвода фрезы.
Вектор подачи rп имеет вид:
r
п
-V t
V 1 t 1
где V 1 – скорость подачи фрезы в процесс фрезерования; t 1 – время подачи фрезы.
Вектор r ф , описывающий движение точки, принадлежащей профилю каждой из реек червячной модульной фрезы, определяется выражением [4]
Гф = Mr (i, j, k, m) = cos[( n -1)^] sin[(n -1)^] 0
Выводы: в работе представлены основные векторные зависимости, определяющие характер взаимодействия нарезаемого зубчатого колеса и червячной модульной фрезы. Сложный процесс взаимодействия профиля зубьев нарезаемого колеса и профиля зубьев фрезы может быть описан алгоритмически, включая в себя относительные вращения заготовки и фрезы, установочные движения и движение инструмента в процессе обработки.
Список литературы Моделирование зубофрезерования цилиндрических зубчатых колес
- Клепиков, В.В. Совершенствование процессов обработки зубчатых колес за счет конструкторских и технологических параметров: -автореф. дис. докт. техн. наук: 05.03.01/Клепиков Виктор Валентинович. -М.: МГИУ, 2001. -41 с.
- Браилов, И.Г. К вопросу моделирования зубо-фрезерования/И.Г. Браилов, С.П. Андросов//Наука и производство -2009: Материалы Международной научно -практической конференции в 2 ч. -Брянск: БГТУ, 2009. -Ч. 2. -С. 16-18.
- Браилов, И.Г. Описание эвольвенты векторной функцией, выраженной в параметрах станочных систем/И.Г. Браилов, С.П. Андросов//Проблемы механики современных машин: Материалы четвертой Международной научно-практической конференции в 3 т. -Улан-Удэ: ВСГТУ, 2009. -Т. 2. -С. 11-14.
- Браилов, И.Г. Моделирование червячной модульной фрезы векторными функциями в параметрах станочных систем/И.Г. Браилов, С.П. Андросов//Современные проблемы в технологии машиностроения: Сборник трудов Всероссийской научно-практической конференции. -Новосибирск: Изд-во НГТУ, 2009. -С. 64-68.
