Модельно-ориентированный инжиниринг физико-технических, информационных и интеллектуальных систем

Автор: Гаричев С. Н., Горбачев Р. А., Давыденко Е. В., Джапаров Б. А., Кондратьев В. В.
Журнал: Труды Московского физико-технического института @trudy-mipt
Рубрика: Информатика и управление
Статья в выпуске: 2 (54) т.14, 2022 года.
Бесплатный доступ
В статье рассматриваются методы и инструменты модельно-ориентированного инжиниринга гибридных технических систем, включающих физико-технические, информационные и интеллектуальные подсистемы.
Технические системы, инжиниринг, моделирование онтологическое моделирование, архитектурное моделирование, параметризация архитектурных моделей и инжиниринг данных, математическое и компьютерное моделирование, анализ и синтез систем, подсистемы физико-технической направленности, информационные и интеллектуальные системы
Короткий адрес: https://sciup.org/142235303
IDR: 142235303 | УДК: 004:501:519.8
Model-oriented engineering of physics and technology, information and intelligence systems
The article discusses the methods and tools of model-based system engineering of hybrid technology systems, including physics and technology subsystems, informational and intellectual subsystems.
Текст научной статьи Модельно-ориентированный инжиниринг физико-технических, информационных и интеллектуальных систем
Современные технические системы становятся все более разнообразными, комплексными и сложными. В XVIII XX веках преобладали системы (изделия, продукты, машины и технологии) физико-технического профиля, использующие преобразование материи и энергии и основанные на развитии алгебры и высшей математики, накоплении знаний и систематизации мультифизических практик.
Во второй половине двадцатого века возникли и стали быстро развиваться подсистемы информационного профиля. Они понимаются как технические системы, предназначенные для работы по требованиям с информацией и информационными процессами. Гибридное совмещение физико-технических и информационных подсистем кардинально расширило возможности построения прикладных технических систем, инициировало выделение и развитие широкого класса, кибер-физических систем, ориентированных на. Индустрию 4.0.
«Московский физико-технический институт (национальный исследовательский университет)», 2022
В XXI веке информационные системы стали пополняться интеллектуальными алгоритмами и решениями, воспроизводящими те или возможности естественного интеллекта человека. В результате стали собираться композитные технические системы, состоящие из физико-технических, информационных и интеллектуальных подсистем.
Общие основы анализа, синтеза, создания и применения самых разнообразных технических систем начали развиваться в последние годы под зонтичным брендом «Модельноориентированный системный инжиниринг» (Model-Based Systems Engineering, MBSE). Согласно INCOSE [1], системная инженерия на основе моделей - это формализованное приложение моделирования для поддержки системных требований, проектирования, анализа, проверки и валидации, начиная с этапа концептуального проектирования и продолжаясь на протяжении всей разработки и последующих этапов жизненного цикла. Ключевая характеристика MBSE - это поддержка одновременного использования множества методов описания (viewpoints), т.е. одновременного применения множества методов моделирования для получения множества групп описаний (views), которые адресуют различные интересы соответствующих заинтересованных лиц.
Согласно SYSTEMS ENGINEERING THINKING WIKI [2], MBSE пытается объединить целый пакет известных стандартов, таких как Процессные стандарты (EIA 632: Processes for Engineering a System, ISO 15288: Systems and software engineering - System life cycle processes, IEEE 1220: Standard for Application and Management of the Systems Engineering Process; Архитектурные методологии (frameworks): DoDAF (The Department of Defense Architecture Framework ), MODAF (The British Ministry of Defence Architecture Oriented System Engineering Method, SADT, IDEFO, другие. Специалистами Большого Физтеха развивается подход к сквозному последовательно исполняемому системному, математическому и компьютерному инжинирингу физико-технических систем, обзоры [6, 8] и социальноэкономических систем, обзоры в [7, 8]. Параллельно подход получил развитие применительно к системному инжинирингу информационных систем, обзор [11], а потом к прикладному инжинирингу интеллектуальных систем, обзоры [10, 12].
В данной работе рассматриваются методы и инструменты системного проектирования гибридных технических систем, одновременно содержащих подсистемы физикотехнической, информационной и интеллектуальной направленности.
-
1) Формируется онтологическое представление и подборка опорных фреймворков моделей систем этой предметной области.
-
2) Предлагается опорная схема (алгоритм) концептуального проектирования гибридных технических систем.
-
3) Приводится прикладной пример фреймворка концептуального проектирования антропоморфного робота.
1. Типология моделей в инжиниринге технических систем
Рассмотрение методов системного проектирования принято начинать с задания онтологии - подборки специфических терминов и понятий предметной области.
Технические системы (машины, оборудование, инструменты в разных сферах - машиностроение, приборостроение, авиастроение, автомобилестроение и т.д.) рассматриваются в инжиниринге как искусственно созданные материальные объекты, изделия, продукты, обладающие ценностью для кого-либо.
Изделие (продукт) - предмет / техническая система или набор предметов производства, подлежащих изготовлению в организации (обобщённом предприятии) по конструкторской документации [ГОСТ 2.101-2016, пункт 3.1].
-
• Изделиями могут быть: устройства, средства, машины, агрегаты, аппараты, приспособления, оборудование, установки, инструменты, механизмы, информационные системы и др.
-
• Число изделий может измеряться в штуках (экземплярах).
-
• К изделиям допускается относить завершенные и незавершенные предметы производства, в том числе заготовки.
-
• Каждая техническая система состоит из ряда конструктивных элементов (звеньев, блоков, узлов, агрегатов), называемых подсистемами.
-
• Для технических систем также выделяют надсистемы - технические объекты более высокого конструктивного уровня, в которые они включены как составные элементы.
Целевой объект - это то, что представляет интерес для наблюдателя. Целевые объекты, составленные из компонент и обладающие целостностью, понимаются как системы. Объектно-ориентированное моделирование предполагает представление с учетом накопленного опыта разнообразных технических объектов, их объединений и детализаций. Описания целевых объектов как систем показывают в заданных требованиях (предназначениях) состав и устройство их конструктивных компонент (звеньев, блоков, узлов, агрегатов), сущностных характеристик и связанностей.
Технические системы характеризуются в инжиниринге заданием таких характеристик, как предназначение; исполняемые требования, устойчивые во времени функции по преобразованию вещества и энергии; функции по преобразованию информации; состав компонент системы, обеспечивающих исполнение функций и др. Под технологией понимаются способы и методы преобразования вещества, энергии и информации из заданного начального состояния в заданное конечное состояние с помощью применяемых методов и инструментов.
Объектно-ориентированный инжиниринг как методология выделяет, аккумулирует, использует накопленные приёмы создания и применения целевых технических систем по изучаемым предметным сферам [5, 9]. Рассматривается как прикладная методология, база знаний и практик для опорных предметных областей инжиниринга - машиностроение, приборостроение, судостроение, авиастроение, строительство гражданских и промышленных объектов и т.д.
Заявленный около двух десятков лет назад NASA и IEEE системный инжиниринг [3-5] обобщает методы и инструменты инжиниринга технических изделий разных предметных областей и формирует способы их локализации в предметных областях методом дедукции — от общих правил к конкретным решениям.
Как важный современный тренд можно отметить трансформацию системного инжиниринга в модельно-ориентированный системный инжиниринг, ориентированный на широкое, упорядоченное применение унифицированных модельных представлений, заменяющих или дополняющих традиционные инженерные способы представления информации - чертежи и техническую документацию [1-4].
Записи моделей удобно размещать в компьютерной среде, что кардинально расширяет возможности моделирования и позволяет осуществлять многие опции анализа, синтеза, проектирования, экспериментирования, эксплуатации систем с использованием компьютерных моделей.
Модель понимается как сущность, воспроизводящая явление, объект или свойство объекта реального мира [ГОСТ Р 57188-2016, статья 2.1.1].
Нотация моделирования - объявленный для применения способ представления модели объекта. Прикладные модели могут формироваться в разных нотациях. Для комплексного моделирования сложных систем могут последовательно применяться несколько нотаций моделирования, рассматриваемых как слои, страты моделирования. Связанность страт обеспечивается через применение единой онтологии, унификации моделей, включения моделей и их компонент одних страт в другие. При этом одни и те же сущности могут быть представлены в разных нотациях с разной степенью детализации и с наследованием части представлений из других страт.
Страты моделей системного инжиниринга можно упорядочить по принципу вложенности («принципу матрешки») - от более простых представлений к более сложным и детальным: 1) онтологические модели; 2) архитектурные модели; 3) параметризированные архитектурные модели; 4) математические модели; 5) компьютерные модели (рис. 1). Каждая последующая страта моделей гармонизирована с предыдущими менее детальными представлениями, наследует ряд их свойств и дополняет их новыми дополнительными свойствами и характеристиками.
Постановка задач модельно-ориентированного анализа системы реализуется через постановку требований к ожидаемым результатам описания системы выбранными средствами моделирования.
Постановка задач модельно-ориентированного синтеза системы реализуется через постановку требований к ожидаемым результатам синтеза системы выбранными средствами моделирования.
Опорную стратификацию нотаций моделей системного инжиниринга можно упорядочить по принципу вложенности («принцип матрешки») - от более простых представлений к более детальным: онтологические модели - архитектурные модели - параметризированные архитектурные модели - математические модели - компьютерные модели (рис. 1). Каждый последующий более детальный тип моделей гармонизирован с менее детальными представлениями, наследует и дополняет их новыми дополнительными свойствами и характеристиками.
система
Предметная область
Целевая техническая
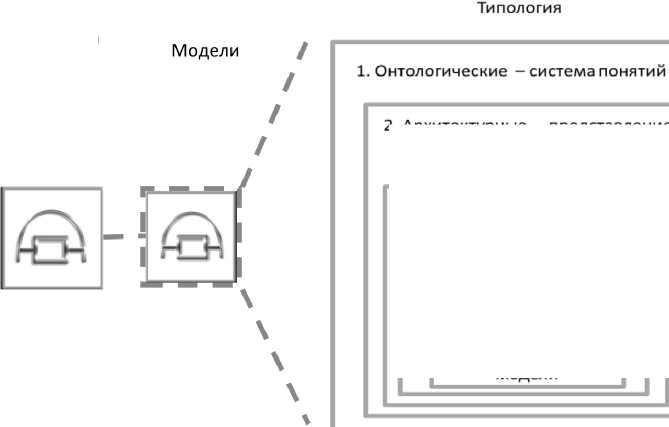
4. Математические модели
3. Параметризированные архитектурные — добавление ситуационных характеристик (данных) архитектуры объекта
2. Архитектурные - представление компонент объектов и их связанностей (структуры)
Рис. 1. Опорные нотации моделирования систем
5. Компьютерные модели
Подробнее типология страт моделей характеризуется следующим образом.
-
1.1. Онтологические модели в семантической форме задают термины и понятия сущностей и их связанностей, используемые при представлении предметной области и её объектов.
Пример. Раздел «Термины и понятия», присутствующий в составе многих инженерных и организационных документов и стандартов.
-
1.2. Архитектурные модели задают, с учётом 1.1, состав и онтологии учитываемых сущностей, их декомпозиции и связанности. Представляются в виде таблично структурированных и упорядоченных фреймворков опорных семантических записей о системе:
е иерархических таксономий учитываемых сущностей системы;
-
• таблиц связанностей таксономий сущностей на уровнях иерархии системы.
Табличные формы представления сущностей и их связанностей удобны для перевода записей о системе в компьютерные базы данных. В целях наглядности табличные представления могут быть приведены в форме эквивалентных им унифицированных визуализированных графовых представлений - рис. 2 [8].
Иерархии и таксономии сущностей
Представления состава сущностей и их связанностей в
форме графов
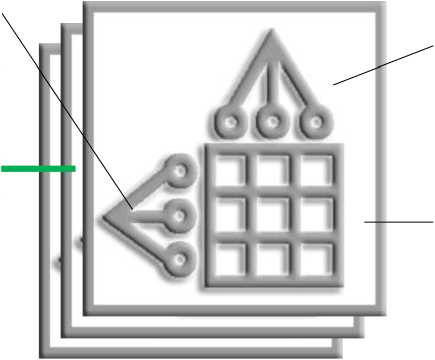
Иерархии и таксономии сущностей
Таблицы учитываемых видов попарных связанностей сущностей
Рис. 2. Обликовое представление комплекса архитектурных моделей технической системы
Формирование конкретного экземпляра фреймворка архитектурных моделей конкретной технической системы осуществляется путем
-
• задания задач и границ моделирования;
е требований и политик моделирования;
-
• идентификации, гармонизации и занесения записей о системе в шаблоны используемых фреймворков.
Сводный фреймворк архитектурных моделей технической системы S представляет собой набор локальных фреймворков. Характерный фреймворк архитектурного описания технических систем [6, 8] приводится в качестве примера, в и. 1-6 табл. 1.
Примеры . Ментальные и структурные карты, альбомы карт предметной области и целевых систем - продуктов (технических систем) и предприятий [8].
В позициях и. 7-10 табл. 1 фреймворк архитектурных моделей дополняется моделями математического и компьютерного моделирования, и. 11 соответствует рассмотрению систем из систем.
Инжиниринговая постановка задачи архитектурного моделирования - постановка допускающих валидацию требований к результатам анализа и синтеза физической системы средствами архитектурного моделирования.
Термины и понятия архитектурных моделей включают онтологию предметной области и дополнительные термины, задающие те или иные свойства архитектурных моделей.
Примеры. Ментальные и структурные карты и альбомы карт предметной области и целевых систем - продуктов (технических систем) и предприятий [1].
Опорная сводная архитектурная модель технической системы S представляет собой набор табличных фреймворков в выбранных унифицированных форматах представлений. Как пример см. табл. 1, и. 1-6.
Таблица!
Компоненты фреймворка моделей технической системы S
|
Способ моделирования |
Пояснения |
|
Онтологичсскос мод елирова нис |
|
|
0. Ключевые термины и понятия предметной области и целевой системы S |
Семантически представленный гармонизированный набор применяемых терминов и понятий |
|
Архитектурное моделирование |
|
|
1. Имя системы S Иерархия рассмотрения системы S |
Уровни иерархии S, упорядоченные сверху-вниз или снизу-вверх |
|
2. Список выбранных для описания системы S сущностей Ej (как примеры - требования, функции, физические компоненты системы,...) |
продукта: Product, Р, подсистемы Sj |
|
3. Модели иерархических таксономий (декомпозиций) сущностей: Ej Breakdown Structure, EjBS; иерархическая таксономия: Ejl состоит и з ejll,ejl2, ejl3,... |
|
|
4. Список учитываемых видов попарных связанностей к сущностей EjBS и EiBS |
|
|
5. Таблицы попарно рассматриваемых связанностей сущностей EjBS и EiBS - модели Desing Structure Matrix (EjBS. EiBS), DSM (EjBS. EiBS) на выбранных уровнях иерархии представления системы |
|
|
б. Сводный фреймворк архитектурных моделей А системы S: A(S) |
Совмещение представлений п. 1-5 |
|
Параметризация системы, математическое компьютерное моделирование |
|
|
7. Список/ справочник качественных и количественных параметров а системы S: a(S) |
Параметры a(S) системы S a(S)BS - иерархическая таксономия параметров: a(S) Breakdown Structure, a(S)BS |
|
8. Математические и алгоритмические модели M(a(S)) включающие параметры a(S) и их связанности |
Набор используемых математических моделей и алгоритмов M(a(S)) - {Mj(a(S))} |
|
9. Компьютерные модели KM(a(S)) включающие параметры a(S) и их связанности; в т.ч. цифровые модели, цифровые двойники, искусственный интеллект |
Набор совместно используемых компьютерных моделей и алгоритмов KM(a(S)) = {KMj(a(S))} |
|
10. Сводный фреймворк моделей M(a(S)) М и KM(a(S)) применяемых при инжиниринге системы S |
Совмещение представлений п. 1—9 |
|
Моделирование |
системы систем |
|
11. Сводный фреймворк моделей применяемых при инжиниринге системы систем S объединяющей системы {S,} |
Совмещение представлений п. 1-10 применяемых при инжиниринге системы систем S объединяющей системы {S,} |
-
1.3. Параметризированные архитектурные модели. Часто говорят, что архитектурные модели задают устойчивые во времени структурные описания системы. Делают описание устройства систем унифицированными, наблюдаемыми, понятными, гармонизированными, удобными для компьютерного моделирования. Они играют роль исходных метаданных для задания качественных и количественных характеристик (параметризации) описания систем.
Параметризация архитектурных моделей дополняет архитектурные модели существенными для рассмотрения качественными и количественными параметрами - ситуаци- онными данными (кратко - данными), делает системы «наблюдаемыми» в пространстве параметров. Идентификация и фиксация ситуационных данных опирается на возможности имеющихся в распоряжении способов наблюдения и учета, см. и. 7 табл. 1.
Примеры. Повсеместно применяемые при описании систем физические характеристики, безразмерные относительные параметры, системные характеристики, классификаторы и справочники ситуационных данных. Для технических систем в качестве характерных примеров данных могут выступать значения физических параметров, параметров входных и выходных потоков энергии, материальных потоков компонент физической архитектуры системы [8].
-
1.4. Математические модели. Математическая модель - модель, в которой сведения об объекте представлены в виде математических символов и выражений [ГОСТ Р 57188-2016, статья 2.1.2]. Математические модели дополняют параметризированные архитектурные модели учитываемыми и математически представленными параметрами систем, их связанностями и математически представленными алгоритмами.
Применяемые в инжиниринге математические представления (см. и. 8, табл. 1) могут быть выражены в форме:
-
• целевых требований в форме ограничений; ограничения формируются путем идентификации и математического представления системных и физических условий, накладываемых на объекты рассмотрения, учета и использования накопленных профильных методик и практик математического моделирования;
-
• целевых критериев; целевые критерии формулируются в виде параметров целевых параметров, сверток параметров в форме целевых функций с указанием в составе требований дополнений в терминах «по возможности больше», «по возможности меньше»;
-
• моделей многокритериальной оптимизации; математических представлений совместно рассматриваемых моделей ограничений и критериев оптимизации;
е математическими алгоритмами; действий, направленных на достижение требуемого результата.
Наличие возможности алгоритмического решения задачи открывает возможность их реализации в компьютерной среде. Система, включающая входные данные и условия, требования к результатам моделирования, математические модели, алгоритмы, необходимую для исполнения алгоритмов компьютерную среду, может рассматриваться как компьютерная модель объекта.
-
1.5. Компьютерные модели (электронные модели): модель, выполненная в компьютерной (вычислительной) среде и представляющая собой совокупность данных и программного кода, необходимого для работы с данными [ГОСТ Р 57412-2017, и. 3.1.7]. Компьютерные модели (см. и. 9, табл. 1) дополняют записи приведенных в п. 2.1-2.5 моделей с применением компьютера и компьютерной среды, что кардинально расширяет возможности, анализа и синтеза задач прикладного моделирования. Компьютерные модели могут также формироваться и использоваться как модули информационных систем.
-
2. Задачи анализа и синтеза технических систем
В основе компьютерной модели лежат архитектурные модели, математические модели, реализованные в виде программного кода, и ситуационные данные, определяющие конкретный объект моделирования. Для применения компьютерной модели в процессе моделирования необходимо использовать программное обеспечение компьютерного моделирования и вычислительной техники [ГОСТ Р 57700.22-2020, пункт 3.1.3]. Компьютерное моделирование изделия выполняют с целью получения данных, необходимых для принятия решений в процессах разработки, проектирования, производства, сопровождения эксплуатации и других задач в ходе жизненного цикла изделия. [ГОСТ Р 57412-2017, и. 3.1.11].
Примеры. Модели, применяемые в информационных системах и системах поддержки принятия решений, модели цифровых двойников объектов, алгоритмы искусственного интеллекта.
Цифровая модель изделия: система математических и компьютерных моделей, а также электронных документов изделия, описывающая структуру, функциональность и поведение вновь разрабатываемого или эксплуатируемого изделия на различных стадиях жизненного цикла, для которой на основании результатов цифровых и (или) иных испытаний по ГОСТ 16504 выполнена оценка соответствия предъявляемым к изделию требованиям [ГОСТ 57700.37-2021].
Методы и инструменты математического и компьютерного моделирования, программно-аппаратные комплексы, обеспечивающие их реализацию, имеют свои особенности для физико-технических, информационных и интеллектуальных подсистем. Это учитывается при формировании и локализации соответствующих фреймворков моделей и алгоритмов предметных областей.
Применение моделирования позволяет заменить в инжиниринговой деятельности действия с реальными объектами на их виртуальные аналоги, что может ускорить проведение работ, повысить их результативность и эффективность. Процедуры моделирования технических систем группируются в два ключевых блока - анализа и синтеза.
Задача модельно-ориентированного анализа системы предполагает постановку требований к ожидаемым результатам описания и анализа системы с применением выбранной методологии и средств моделирования, а также, по возможности, предполагает сбор и систематизацию исходных данных в целях модельно-ориентированного представления, анализа и сопоставления известных профильных кейсов.
Задача модельно-ориентированного синтеза системы предполагает постановку, с учётом результатов анализа, требований к ожидаемым результатам синтеза (сборки итогового представления) рассматриваемой системы. В исполнении задач синтеза одновременно применяются разработанные на этапе анализа описания системы и выявленные на этапе сбора исходных данных и обзоров кейсы существующих решений. Синтез происходит на основе совмещения этих представлений в исполнимой конфигурации системы [4, 5].
Алгоритм анализа технической системы включает:
-
• сбор и анализ исходных данных;
-
• выделение функциональных подсисистем и идентификацию их связанностей;
-
• исполнение итерационных процедур унифицированного описания компонент системы и их связанностей, иерархические и горизонтальные детализации формируемых представлений:
-
• обзоры и анализы устройства и характеристик известных технических систем и условий их применения;
-
• обликовое представление технических систем: идентификация и итерационное уточнение требований к системе и компонентам, генерацию вариантов представления устройства системы с учётом требований и имеющихся в распоряжении кейсов, практик, результатов анализа, знаний.
Алгоритм синтеза технической системы включает:
• выбор и консолидации на основе результатов проведенного анализа и рассмотренных практик итогового представления системы, принимаемого к дальнейшему применению;
3. Опорный алгоритм модельно-ориентированного системного инжиниринга и пример его локализации
е валидация итогового варианта представления системы.
Модельно-ориентированный подход существенно помогает локализации и конкретизации деятельности по инжинирингу технических систем. Описания, модели, характеристики технической системы системно представляются на основе применения и локализации показанных в табл. 1 унифицированных моделей, что
-
• закладывает основу применения типовых схем и решений, обеспечивает учёт известных практик и через это повышение результативности системного инжиниринга;
-
• существенно сокращает усилия на формирование и реализацию дорожных карт проведения работ и подбор инструментов для их проведения;
-
• позволяет сопоставлять и накапливать полезные результаты в форме репозитариев систематизированных модельных решений и знаний, поддерживать, опираясь на решения репозитория, выбор решений для синтеза систем;
-
• в условиях цифровой трансформации позволяет формировать и по шагам развивать гармонизированные платформы прикладных унифицированных моделей и инструментов прикладного инжиниринга.
-
• Требования к физико-технической подсистеме и се функции
-
• Формирование функциональной архитектуры физико-технической подсистемы.
-
♦ Параметризация и трансформация архитектурных моделей физико-технической подсистемы в математические и компьютерные модели и алгоритмы - п. 7 - п. 9 табл. 1
-
• Формирование и синтез программноаппаратного комплекса моделирования физикотехнической подсистемы.
-
• Требования к информационной подсистеме управления движением и ее функциям.
-
• Формирование функциональной архитектуры информационной подсистемы управления движением.
-
• Архитектура данных информационной подсистемы управления движением.
-
• Модели и алгоритмы информационной подсистемы управления движением.
-
• Формирование и синтез программноаппаратного комплекса информационной подсистемы управления движением.
-
• Требования к информационной интеллектуальной подсистеме управления движением и ее функциям.
-
• Формирование функциональной архитектуры интеллектуальной подсистемы управления движением.
-
• Архитектура данных интеллектуальной подсистемы управления движением.
-
• Требования к антропоморфному роботу и его функции.
-
• Задание функциональной архитектуры антропоморфного робота (функции, компонент - функциональный компонент
-
• корпус и каркас;
-
• двигательная подсистема;
-
• энергетическая подсистема;
-
• связанности подсистем.
-
• Параметризация, математическое и компьютерное моделирование физико-технической подсистемы:
-
• математические и компьютерные пространственные модели физико-технической подсистемы, CAD-моделирование;
-
• мультифизические модели ограничений и алгоритмы физико-технической подсистемы. САЕ-моделирование;
-
• модели инженерных расчетов энергобалансов энергетической подсистемы. САЕ-модслированис.
-
• Формирование и синтез программно-аппаратного комплекса физико-технической подсистемы антропоморфного робота (с использованием результатов исследований и системного обзора предметной области).
-
• Требования к информационной подсистеме управления движением антропоморфного робота и её функциям.
-
• Формирование функциональной архитектуры информационной подсистемы управления движением антропоморфного робота.
-
• Формирование архитектуры данных информационной подсистемы управления движением антропоморфного робота.
-
• Формирование математических моделей и компьютерных алгоритмов информационной системы управления движением антропоморфного робота при заданной архитектуре физико-технической подсистемы.
-
• Формирование и синтез программно-аппаратного комплекса информационной подсистемы управления движением антропоморфного робота.
-
• Требования к информационной интеллектуальной подсистеме управления движением антропоморфного робота и ее функциям.
-
• Формирование функциональной архитектуры интеллектуальной подсистемы управления движением антропоморфного робота.
3. Детализация описания и моделирования, в увязке с моделями верхнего уровня, функциональных подсистем
(предназначение подсистем, требования к подсистемам и их целевые параметры, выделение компонент подсистем их функций, идентификация функциональных подсистем и их ключевых связанностей, формирование и применение математических и компьютерных моделей функциональных подсистем)
Инжиниринг фи з и ко- гсх ни чес кой нолей с те мы п. 2.3-2.9 табл. 1.
Инжиниринг информационной подсистемы управления движением физико-технической нодсис гемы — п. 2.7 табл. 1
Инжиниринг информационной интеллектуальной подсистемы управления движением физико-технической подсистемы- п. 2.7 табл. 1.
Инжиниринг физико-технической нодсисгемы антропоморфного робога (материалы и физические компоненты, движение, энергетика).
Инжиниринг информационной нодсисгсмы управления движением антропоморфного робога (управление движением сложного физического тела).
Инжиниринг информационной интеллектуальной нодсисгсмы управления движением ап тропоморфного робога (машинное обучение)/ подсистема акробатического интеллекта управления движением антропоморфным роботом.
В этой связи первоочередной является задача выделения актуальных предметных областей технических систем, формирования для них опорных прикладных алгоритмов модельно-ориентированного системного инжиниринга и накопление примеров реализации алгоритмов на всех типовых этапах системного проектирования технических систем -концептуального проектирования, эскизного проектирования и рабочего проектирования. В современных условиях применение модельно-ориентированного подхода необходимо начинать прямо с этапа концептуального проектирования, что позволяет «сдвинуть моделирование по жизненному циклу технических систем влево» [4, 5].
В статье приводится пример построения такого алгоритма модельно-ориентированного концептуального проектирования, выполненный в Центре прикладных систем искусственного интеллекта МФТИ, для интеллектуальных подвижных робототехнических систем и приводится пример его локализации для разработки и исследований антропоморфного робота. Общая схема алгоритма представлена в табл. 2 (левый столбец). В правом столбце табл. 2 приведен, в сокращенной версии, пример локализации алгоритма в задаче системного проектирования антропоморфного робота.
Т а б л и ц а 2
Опорный алгоритм модельно-ориентированного системного инжиниринга технической системы и пример его применения
|
1. Сбор и анализ исходных данных (данные маркетинговых исследований, требования потенциального заказчика, профильные обзоры, репозитории модельно-ориентированных представлений исходных данных и знаний к проекту системной разработки) |
|
|
2. Верхнсуровневое описание, х (предназначение, верхнеуровневые требования кация компонент целевой системы и их функций - । |
одслнрованис и анализ целевой системы ко всей целевой системе и целевые параметры, идентифи-зункциональных подсистем и их ключевых связанностей) |
|
Компоненты опорного алгоритма инжиниринга целевых технических систем (в зависимости от требований и условий системного проектирования часть позиций может опускаться inn дополняться). Записи представлены в привязке к № позиций табл. 1. |
Пример. Компоненты алгоритма инжиниринга антро поморфного робота (инжиниринговые записи выполняются по возможности в выбранных нотациях моделирования. представленных в табл. 1) |
|
Выбор предметной области: системный инжиниринг подвижных систем с элементами искусственного интеллекта (беспилотные автомобили и платформы, робототехнические системы) - п. 2.2 табл. 1. |
Предметная область — системный инжиниринг антропоморфной робототехники Целевая система - удовлетворяющий требованиям ТЗ прототип антропоморфного робота |
|
Задание рассматриваемых уровней иерархии целевой технической системы - п. 2.2 табл. 1. |
Уровни иерархии рассмотрения: антропоморфный робот (точка сборки целевой системы верхнего уровня) - функциональные подсистемы робота - иерархические таксономии функциональных подсистем (по необходимости) |
|
Задание общих требований к целевой технической системе - п. 2 табл. 1. Сбор и анализ исходных данных - п. 1 табл. 1. Варианты:
Задание миссии и предварительного облика целевой технической системы - п. 1 табл. 1. |
ТЗ на исследование и разработку антропоморфного робота Обзор и анализ практик системного проектирования антропоморфных роботов, в том числе:
Обликовое представление антропоморфного робота по требованиям. И Физико техническая под система j (Ңр Информационная подсистема g управления НИ НП у Интеллектуальная Ц подсистема управления |
|
• Выделение и идентификация функциональных подсистем и формирование верхнеуровне-воіі опорной архитектуры рассматриваемых технических систем - п. 2.2 - п. 2.6 табл. 1 |
|
|
• Задание используемых для описания и анализа целевой технической системы сущностей -п. 2.3 табл. 1 |
|
|
• Возможные дополнительные расширения функциональности систем |
• Дополнительные, при необходимости, функциональные подсистемы - техническое зрение, картирование окружающей обстановки, маршрутизация движения, взаимодействие с человеком через разговорного ассистента....) |
|
|
|
Инжиниринг дополнительных подсистем технической системы . |
... |
Методы и инструменты математического и компьютерного моделирования, программно-аппаратные комплексы, обеспечивающие их реализацию, имеют свои особенности для физико-технических, информационных и интеллектуальных подсистем. Это учитывается при формировании и локализации соответствующих функциональных и кросс-функциональных платформ предметных областей и алгоритмов ведения деятельности.
Заключение
-
1. Сформировано описание открытой платформы/унифицированных модельных фреймворков применяемых в инжиниринге подсистем физико-технической, информационной и интеллектуальной направленности. Предложенное описание позволяет формировать состав, последовательность, политики моделирования, проводить анализ и синтез сложных гибридных систем опираясь на унифицированные решения платформы моделей.
-
2. С применением предложенной платформы моделей представлен алгоритм их применения на этапе концептуального проектирования интеллектуальных подвижных робототехнических систем. Предложенный алгоритм может использоваться как опорное решение для последующей локализации при концептуальном проектировании разнообразных подвижных робототехнических систем, выполняющих функции интеллектуального управления перемещением и движениями, технического зрения и распознавания окружения, картирования окружения и др.
-
3. Приведен пример локализации предложенного алгоритма концептуального проектирования в системной разработке антропоморфного робота.
-
4. Другие примеры применения представленного подхода можно найти на предприятиях Роскосмоса и ОПК [6, 13].
Список литературы Модельно-ориентированный инжиниринг физико-технических, информационных и интеллектуальных систем
- https:/\/sebokwiki.org/4\dki/INCOSE_Systems_Engineering_Vision_2ü2ü
- http://sewiki.ru/MBSE
- https:/y4vww.sebokwiki.org/4\dk^
- NASA. System Engineering Handbook. 2008 2020.
- Ролшнов A.A. Прикладной системный инжиниринг. Москва: Физматлит, 2015.
- Алещенко A.C.. Клнте.в О.П., Кондратьев В.В.. Рассказов A.A. Совмещение архитектурных и математических моделей в системном инжиниринге технических систем // Космонавтика и ракетостроение. 2021. № 5(122).
- Методологическое руководство по системе ТСМ NC. Коллектив авторов. Москва: ОЦКС Роеатом, 2020.
- Кондратьев В.В. Управление архитектурой предприятия. (Конструктор регулярного менеджмента). Изд. 2-е дораб. и дополн. Москва: Инфра-М, 2019.
- Кондратьев В.В. Модельно-ориентированный системный инжиниринг 2.0. Москва: МФТИ, 2021.
- Потюпкин А.Ю., Чечкин А.В. Искусственный интеллект на базе информационно-системной избыточности. Москва: Курс, 2019.
- Когаловский М.Р. \и др.]. Глоссарий по информационному Обществу. Монографии сотрудников ИПР РАН, Socionet; Институт проблем рынка РАН / под ред. Ю.Е. Хохлова. 2009.
- Альманах по Искусственному Интеллекту (aireport.ru). Аналитический сборник. № 1-№ 9. www.AIreport.ru.
- Четвергов В., Вычегжанин К. Поляков А. Использование методов модельно-ориентированного системного инжиниринга при создании методики планирования производственного процесса освоения новых продуктов на предприятиях ОПК // Русский инженер. 2021. № 03(72).
