Модернизация системы управления самолетов семейства Ту-204

Автор: Баичев Алексей Львович
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Механика и машиностроение
Статья в выпуске: 4-4 т.15, 2013 года.
Бесплатный доступ
В работе автором предложены решения, позволяющие объединить автоматическую систему штурвального управления и систему дистанционного управления на самолете Ту-204, исключить резервный механический контур из состава системы управления с заменой гидравлических приводов РП-95 (РП-95А) на электрогидравлические рулевые приводы ЭГРП.
Модернизация сур, снижение массы, отказ от механического управления
Короткий адрес: https://sciup.org/148202393
IDR: 148202393 | УДК: 629.7.058
Modernization of the flight controls system Tu-204
The author offers solutions allow: to unite the automatic system wheel control and a remote control system of the Tu-204, eliminate the mechanical outline of the control system with the replacement of hydraulic actuators RP-95 electrohydraulic steering actuators EGRP
Текст научной статьи Модернизация системы управления самолетов семейства Ту-204
В настоящее время система управления рулями (СУР) самолета Ту-204 состоит из сочетания электрического и механического контуров управления, ее можно рассматривать, как переходную на этапе эволюции от традиционно механической системы к полностью электрической. За годы эксплуатации самолетов Ту-204 не зафиксировано случаев перехода на аварийный механический контур, что свидетельствует о высокой надежности применяемого отечественного электрооборудования.
СУР-204 проектировалась более 20 лет назад, за это время наука и электроника продвинулись далеко вперед в вопросах надежности и компактности, появились новые ПКИ. В системах управления механизацией крыла Ту-204 применяются только электрические сигналы от летчика до привода, и нет никакого сомнения в правильности выбранного решения. Система управления элеронами также имеет только электрическое управление, и за годы эксплуатации не было случаев ее полного отказа.
Кроме того, весьма остро в авиации стоит вопрос снижения массы, Ту-204/214 не исключение. В связи с этим непрерывно ведется работа, направленная на оптимизацию конструкции. На основании изложенного предпринята попытка оценить возможность исключения аварийного механического контура из СУР и повышения технического совершенства системы управления самолетом.
Предлагается:
. объединить автоматическую систему штурвального управления (АСШУ) и систему дистанционного управления (СДУ) в единый комплекс. Принципиальная схема представлена на рис. 1;
. установить вместо датчиков ДПС-6 более компактные датчики ДПР-3;
. заменить цифровые блоки вычислителей устойчивости и управляемости БВУУ-1-3М и БВУУ-1-5М на блоки нового поколения разра- Баичев Алексей Львович, инженер-конструктор.
ботки МИЭА. Новые БВУУ имеют повышенную надежность, за счет установки в вычислителях трех процессоров, производства разных фирм. Также в них встроены аккумуляторы, обеспечивающие беспрерывную работу при полном отказе электрического питания;
. установить вместо гидравлических приводов РП-95 (РП-95А) электрогидравлические рулевые приводы (ЭГРП). ЭГРП - конструктивно представляет из себя гидравлический рулевой привод с индивидуальным электронным блоком управления и контроля. Применение ЭГРП позволяет повысить надежность системы за счет исключения лишних звеньев на пути управляющего сигнала от вычислителя до привода, а также существенно снизить массу пустого самолета, так как отпадает необходимость в исполь-
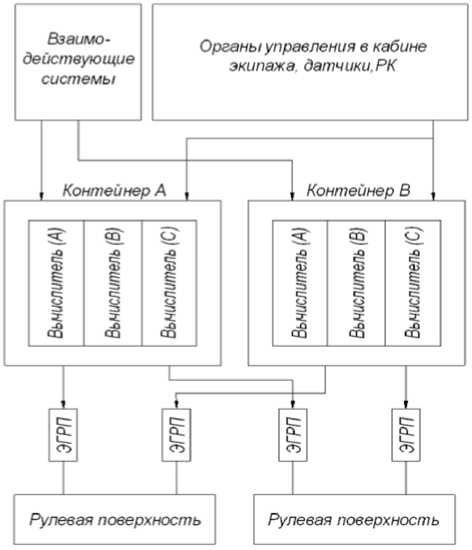
Рис. 1. Принципиальная схема развития СУР самолета Ту-204 на примере одного канала управления зовании механической проводки в каналах системы управления.
Рассмотрим представленные решения на примере СУ интерцепторами и воздушными тормозами. На каждой консоли крыла Ту-204 расположено по пять секций интерцепторов и по две секции воздушных тормозов. Секции интерцепторов соединены механически с помощью сцепок: первая со второй; третья с четвертой и пятой.
В настоящее время в состав системы управления интерцепторами и воздушными тормозами входят (рис. 2):
. штурвалы левого и правого пилотов с устройствами загрузки;
. четыре (по две на каждой консоли крыла) электродистанционных системы управления СДУ-6 интерцепторов;
. рулевые приводы РП-95 (РП-95А) интерцепторов (по шесть на каждой консоли) и воздушных тормозов (по три на каждой консоли крыла);
. рукоятка управления интерцепторами (РУИ) с датчиком ДПР-45;
штурвалы между собой, с пружинными загружа-телями и аварийными приводами – РП-97, на крыле - рулевые агрегаты РА-86 с РП-95 интерцепторов, проводку управления интерцепторами с РП-95 воздушных тормозов и АО-2.
При нормальной работе сигналы перемещения штурвалов с датчиков ДПС-6 из состава АСШУ поступают в блоки БВУУ-1-5М бокового канала. Сигналы АСШУ поступают в 4 электронных блока БУК-17 из состава СДУ-6 интерцепторов и отрабатываются рулевыми агрегатами РА-86 через механическую проводку на входы двенадцати одноканальных рулевых приводов РП-95.
При отказе АСШУ сигналы перемещения штурвалов с датчика ДПР-45 поступают в блоки БУК-17 из состава СДУ-6 интерцепторов и отрабатываются рулевыми агрегатами.
При отказе двух каналов СДУ-6 интерцепторов на одной консоли крыла автоматически отключаются два канала СДУ-6 на другой консоли, и подключается гидропитание РП-97, обеспечива- ющего передачу механического сигнала отклонения штурвалов через аварийный механический
. четыре агрегата отключения воздушных тормозов АО-2;
. механическая проводка, соединяющая:
контур к рулевым приводам интерцепторов.
При отклонении РУИ сигналы с датчика перемещения ДПР-45 поступают в блоки БУК-17
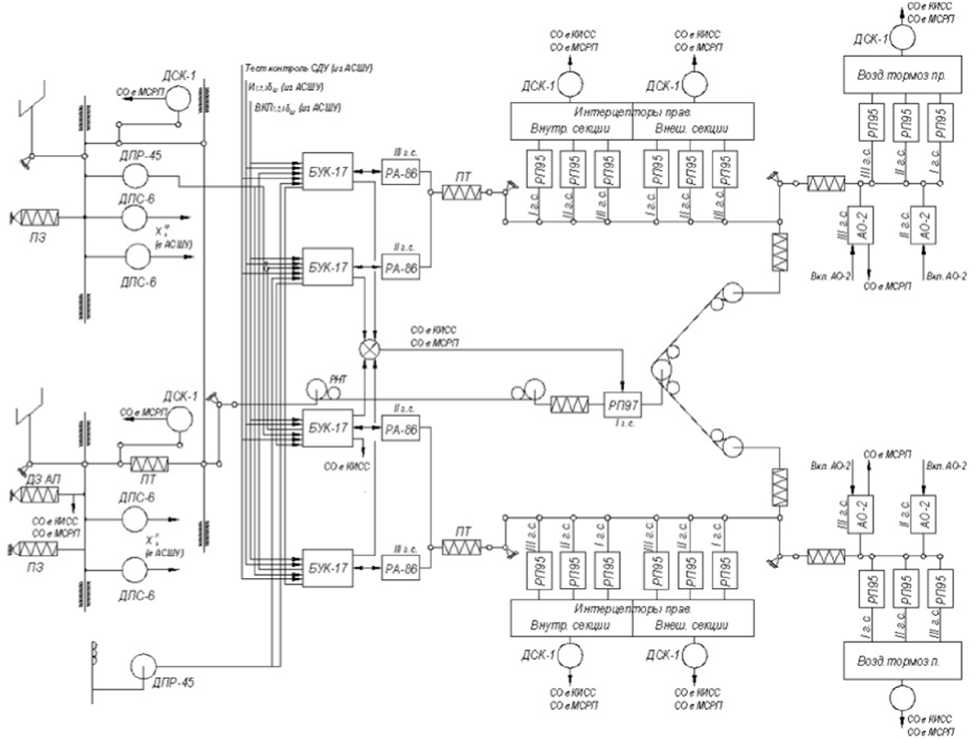
Рис. 2. Существующая система управления интерцепторами и воздушными тормозами:
СО – сигнализация отказов; И – управляющие сигналы;
ВКЛ – разовые команды исправности сопровождающие упр. сигналы
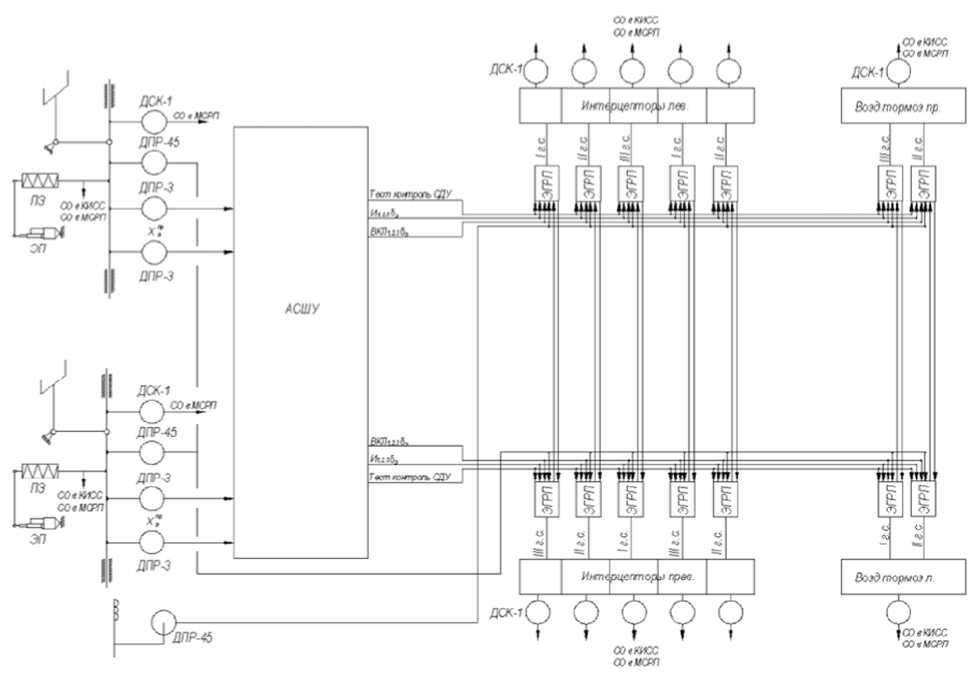
Рис. 3. Модернизированная система управления интерцепторами и воздушными тормозами: СО – сигнализация отказов; И – управляющие сигналы;
ВКЛ – разовые команды исправности сопровождающие упр. сигналы
СДУ-6 интерцепторов и отрабатываются всеми четырьмя РА-86 на входные звенья РП-95.
После модернизации в состав системы управления интерцепторами и воздушными тормозами войдут (рис. 3):
-
. штурвалы левого и правого пилотов с устройствами загрузки;
-
. РУИ с датчиком ДПР-3;
-
. ЭГРП интерцепторов (по пять приводов на каждой консоли крыла);
-
. ЭГРП воздушных тормозов (по два привода на каждой консоли крыла).
Взаимной механической связи посты управления левого и правого пилотов не имеют. Подобный вариант используется на самолетах семейства A320, где рукоятки управления по тангажу и крену, не имеют взаимной механической связи, а приоритет управления обеспечивается переключателем на ручке управления.
При нормальной работе сигналы перемещения штурвалов с датчиков ДПР-3 поступают в блоки БВУУ нового поколения. Сигналы АСШУ поступают напрямую в блоки управления ЭГРП интерцепторов и воздушных тормозов.
При отказе основного контура АСШУ сигналы перемещения штурвалов с датчиков ДПР-3 поступают в блоки управления ЭГРП.
Каждая секция интерцепторов работает индивидуально, без механической сцепки с соседними секциями. ЭГРП на разных консолях крыла попарно имеют связь друг с другом.
При отказе ЭГРП секции интерцепторов на одной консоли - автоматически отключается соответствующий привод на другой консоли.
При отклонении РУИ, сигналы с датчика перемещения поступают в блоки управления ЭГРП интерцепторов и отрабатываются приводами.
Подобный подход позволяет сохранить полноценное управление отдельными секциями, при отказе одной из гидросистем. Повышается техническое совершенство системы, формируются дополнительные возможности по индивидуальной регулировке каждой секции в отдельности, что необходимо для повышения аэродинамического качества крыла. Дополнительно можно рассмотреть использование не всех секций интерцепторов для выполнения торможения или маневрировании, а только части из них, в зависимости от условий полета.
По предварительным подсчетам применение данных решений позволит снизить массу пустого самолета на 60 кг. Модернизация всей СУР-204, позволит облегчить самолет примерно на 300 кг.
Таблица 1. Данные по массам
|
Масса существующей системы, кг |
Масса снимаемой проводки, кг |
|
|
СУР в фюзеляже (Системы управления по крену, по курсу, по тангажу) |
305 |
98 |
|
СУ элеронами, интерцепторами и ВТ; |
295 |
60 |
|
СУ управления РВ в стабилизаторе |
97 |
38 |
|
СУ управления РН в киле |
153 |
103 |
|
Итого: |
850 |
299 |
Согласно схемам, представленным выше, снижение массы, в основном, достигается за счет отказа от механической проводки управления, уменьшения количества гидравлических и элек-трогидравлических агрегатов и применения современной электронной элементной базы. Дан- ные по массам приведены в табл. 1.
Для более глубокой проработки вопросов, связанных с усовершенствованием СУР, необходима совместная работа специалистов по аэродинамике, прочности, оборудованию и вычислительной технике
MODERNIZATION OF THE FLIGHT CONTROLS SYSTEM TU-204
