Модифицированный метод прямого поиска в оптимизационных задачах специальной структуры

Автор: Бородин А.А., Канищев А.С., Лютиков И.В.
Журнал: Журнал Сибирского федерального университета. Серия: Техника и технологии @technologies-sfu
Статья в выпуске: 8 т.9, 2016 года.
Бесплатный доступ
В статье рассмотрен подход к решению оптимизационных задач специальной структуры: условной оптимизации вещественной нелинейной целевой функции n-мерного аргумента с неявно заданными нелинейными ограничениями. Представленный методический подход на основе модифицированного метода Хука-Дживса позволит определить оптимальные наборы значений характеристик систем военного назначения, функционирующих в различных условиях обстановки, по критерию минимальной стоимости при ограничении на требуемый уровень эффективности за располагаемое время.
Оптимизация, вектор, варианты внешней среды, характеристики системы, метод
Короткий адрес: https://sciup.org/146115156
IDR: 146115156 | УДК: 519.8:355 | DOI: 10.17516/1999-494X-2016-9-8-1229-1237
The modified method of direct search in optimizing tasks of special structure
In article approach to the solution of optimizing tasks of special structure is considered: conditional optimization of material nonlinear criterion function of n - measured argument with implicitly set nonlinear restrictions. The presented methodical approach, on the basis of the modified Hook-Dzhivsa’s method, will allow to determine optimum sets of values of characteristics of the military systems functioning in various conditions of a situation by criterion of the minimum cost at restriction on the demanded effi ciency level for the located time.
Текст научной статьи Модифицированный метод прямого поиска в оптимизационных задачах специальной структуры
В практике научных исследований процессов функционирования систем военного назначения зачастую возникает необходимость решения задачи оптимизации значений характеристик этих систем, функционирующих в различных условиях обстановки, по критерию минимальной стоимости при ограничении на требуемый уровень эффективности за располагаемое время. В общем виде математическая постановка подобных задач может быть представлена в виде
С( Χ опт ,Χ ср ) → min , Χ опт ∈ ΩΧ
Э(Χопт,Χср)≥Этр,Т(Χопт,Χср)≤Трасп,Χопт ∈ ΩΧΧср ∈ ΩΧср, где С (X опт, X ср), Э (X опт, X ср), Т (X опт, X ср) - функции стоимости, эффективности и времени соответственно; Этр, Трапр - требуемые значения эффективности и располагаемого времени функционирования систем военного назначения; Хопт = (хопт1 ,...,хопте,..., хопт@) - вектор значений оптимизируемых переменных; Хср – вектор значений характеристик внешней среды; QX, Охср - область допустимых значений оптимизируемых переменных и значений характеристик внешней среды.
Анализ подобных задач показывает, что их особенность, как правило, состоит в том, что функции стоимости С(Хопт,Хср) и эффективности Э(Хопт,Хср) нелинейные. При этом чаще всего функция ограничений Э(Хопт,Хср) не может быть получена в явном виде, поскольку ее значения определяются на основе моделирования процессов функционирования исследуемых систем военного назначения, являющихся по своей сути сложными военно-техническими системами, при различных характеристиках внешней среды.
Механизм формирования вариантов внешней среды, принимаемых для моделирования, определяется спецификой функционирования рассматриваемых сложных военно-технических систем.
Внешняя среда характеризуется набором параметров различной природы. В военных системах военного назначения параметры могут быть сведены к основополагающим группам характеристик: характеристики противника, района военных действий и своих войск.
Г руппу характеристик противника составляют технические характеристики средств нападения и пространственно-временные характеристики операций противника. К характеристикам этой группы могут быть отнесены такие физические характеристики, как тактикотехнические характеристики средств нападения, характеристики обеспечивающих сил и средств и т. д.
Г руппа характеристик района военных действий включает метеорологические характеристики, характеристики коммуникаций, характеристики объектов, имеющих повышенную опасность, и т.д.
Группу характеристик своих войск составляют тактико-технические характеристики образцов оружия, характеристики боевых порядков, вариантов применения своих во-йск и т. д.
Учитывая вышеизложенные положения, вектор характеристик среды Хср можно представить как ср пр. р. .в).
где Х ср = ( Х пр , Х р , Х св ) — векторы характеристик противника, района военных действий и своих войск соответственно.
В этом случае вектор значений характеристик противника будет иметь вид
где х^’-рх прп ,-, XnpN - значения характеристик противника; N - общее количество характеристик противника.
Аналогично можно записать вектор значений характеристик района военных действий:
х прnmin
≤ хпрn ≤ хпрnmax, ∀ n ∈ 1,N,
где х прnmin , х прnmax , х рkmin , х рkmax , х свlmin , х свlmax – минимальное и максимальное значения n -ой, n = 1, N характеристики противника, k -той, k = 1, K характеристики района военных действий и l -той, l = 1, L характеристики своих войск.
В дальнейшем допустим, что характеристики противника, района военных действий и своих войск могут принимать счетное количество значений в интервалах (6) так, что n -я характеристика противника принимает A n значений V n е 1,N , к -я характеристика района военных действий - В к значений V к е 1,K , l -я характеристика своих войск - C l значений V l е 1,L .
В результате для всех характеристик противника имеем суммарное число значений
N
АПР- '- для всех характеристик района военных действий имеем суммарное число значений
В z = S Вк(8)
рΣ k=1 k и для всех характеристик своих войск имеем суммарное число значений
L
Ссв ; = £ С1 .
l = 1
Кроме того, для упрощения рассуждений в дальнейшем будем полагать, что возможны любые сочетания рассматриваемых характеристик (на практике это не всегда выполняется).
На рис. 1 показан механизм формирования вариантов среды с различными значениями параметров противника.
Мы видим, что число возможных вариантов среды равно числу сочетаний из общего числа возможных значений всех переменных AпрЕ (выражение 6) по числу временных параметров N , т.е.:
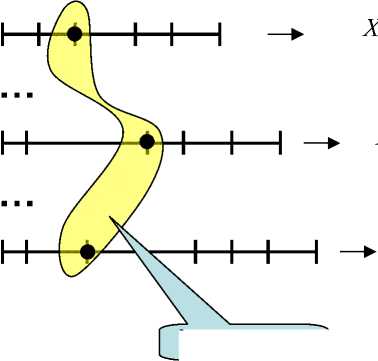
Хпрn ⇒ Аn пр1 ⇒ А1
Вариант характеристи противника
Рис. 1. Механизм формирования вариантов среды с различными значениями характеристик противника
Х прN ⇒ А N
Nпр 1= С A .(10)
пр Σ
Аналогично формируются варианты среды района военных действий:
Nр . = СВ.
и параметров своих войск:
Nсв .= ССсв. .(12)
Каждый i-й, i е 1, Nпрz , вариант среды с различными значениями характеристик противника является элементом множества возможных вариантов – Ω . Аналогично каждый j-й, пр j е 1, NрЕ , вариант среды с различными значениями параметров района военных действии есть элемент множества возможных вариантов — Пр и каждый q-й, q G1, Ncez , вариант среды с различными значениями пространственных параметров своих войск — элемент множества возможных вариантов Псв-
Полагая, что значения характеристик противника, района военных действий и своих войск принимают значения независимо друг от друга, можно рассчитать число возможных вариантов внешней среды N Σ :
N = С 3 (13)
2 ( N _+ N _+ N „)
v пр 2 р 2 св 27
На рис. 2 схематично показан механизм формирования варианта внешней среды.
Мы видим, что формирование вариантов внешней среды осуществляется на основе выбора и объединения единичных элементов множеств Ωпр, Ωр, Ωсв. В качестве примера на рис. 2 (замкнутый контур) показан вариант внешней среды B ijq , имеющий i -й вариант характеристик противника, j -тый вариант характеристик района военных действий и q -й вариант характеристик своих войск.
Каждый B ijq -вариант внешней среды представляет собой вполне конкретную ситуацию для моделирования. Однако даже при самом приблизительном рассмотрении приходим к выводу о существовании большого множества таких ситуаций.
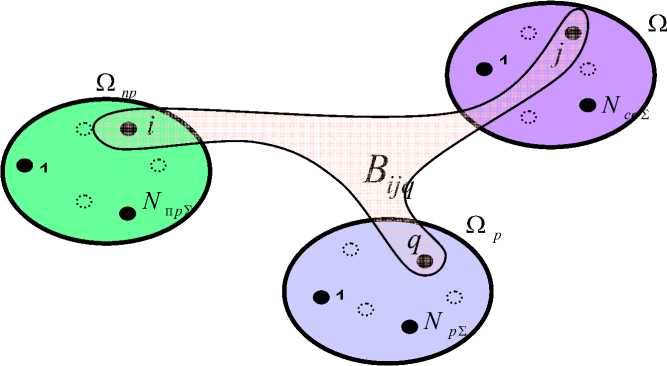
Рис. 2. Механизм формирования вариантов внешней среды
Так, например, допустим, что внешняя среда содержит по три ( N=K=L= 3) характеристики, каждая из которых может принимать по три значения А ф Е - А врЕ - А прЕ = 9, в этом случае число возможных физических (временных, пространственных) вариантов среды согласно (10-12) составит
N. = N = N = С N = С N = С N = С 3 = 84
ф £ в р £ п р £ Аф £ Авр £ Апр £ 9 .
Тогда число вариантов внешней среды (ситуаций) согласно (13) будет равно
N Е = С N Е+ N ep е + N np, ) = С (384 + 84 + 84) = 2 6 3 5 5 0 0. (15)
Естественно предположить, что в условиях такого числа ситуаций принять адекватное единственно правильное решение крайне затруднительно. При большем числе характеристик противника, района военных действий и характеристик своих войск, а также при возрастании количества значений каждой из них общее число ситуаций резко возрастает, приводя к невозможности получения хотя бы какого-то рационального решения.
Аналогичные рассуждения можно провести для составляющих вектора оптимизируемых переменных. В этих условиях зачастую прибегают к формированию счетного числа вариантов, в наибольшей степени отражающих характеристики внешней среды для рассматриваемой задачи, что равносильно декомпозиции оптимизационной задачи (1) на ряд самостоятельных задач.
Для каждого варианта значений характеристик внешней среды в результате решения оптимизационной задачи (1) может быть получено единственное множество оптимальных значений оптимизируемых переменных, в рамках принятых ограничений, в точке ( ° ) 0 - мерно го гиперкуба, ограниченного областью Q X , вида
О
опт
ОО О
= ( x опт1 ,...,x оптθ ,..., x опт Θ ) .
При этом границы гиперкуба определяются в Θ – мерном пространстве минимальными и максимальными значениями вектора X опт:
x оптθ min ≤ x оптθ ≤ x оптθ max , ∀ θ ∈ 1, Θ
Отмеченные обстоятельства свидетельствуют о значительной размерности задач подобного типа, а невозможность получения целевой функции С( Х опт, Х ср) и функции ограничений Э( Х о пт, Х ср ) в явном виде свидетельствуют о том, что единственным методом получения решения для подобных задач выступает метод прямого поиска, предполагающий на каждом шаге моделирования вычисление значения целевой функции и проверке результатов на удовлетворение ограничениям.
Среди методов прямого поиска зачастую применяются методы симплексов (Нелдера-Мида, модифицированные методы Нелдера-Мида), методы поиска Хука-Дживса, методы сопряженных направлений Пауэлла и др. [1-4]. Уже при размерности задачи Θ ≥ 10 требуются значительные затраты машинного времени.
В этих условиях методы симплексов значительно уступают методу Хука-Дживса по объемам требующихся вычислительных мощностей.
Сущность метода Хука–Дживса заключается в том, что из допустимой точки Χ∗опт ∈ ΩΧ по каждой характеристике исследуемой системы осуществляется последовательность шагов в сто-– 1234 – рону уменьшения и увеличения значений, составляющих вектора Xопт = (xопт1 ,...,x xопт0), на величину Δxотп1. При этом значение характеристики снижающей значение целевой функции С(Хопт,Хср) и удовлетворяющей функции ограничений Э(Хопт,Хср) фиксируется и с этой точки, по следующей характеристике осуществляется уменьшение и увеличение ее значений на величину Axотп2. Значение 2-й характеристики снижающей значение целевой функции С(Хопт,Хср) и удовлетворяющей функции ограничений Э(Хопт,Хср) снова фиксируется и процедура повторяется Θ раз. В результате через Θ шагов получаем точку, из которой продолжается движение к минимуму целевой функции. Окончанием процедуры поиска минимума целевой функции является отклонение функции ограничений от требуемого значения на малую наперед заданную величину е такую, что
| Э„ - Э ( X „ , X ср ) |< £ . (18)
Из физической сущности задачи (1) можно заметить, что возрастание значений каждой из оптимизируемых переменных приводит к возрастанию значений функций С( Х опт, Х ср) и Э( Х опт, Х ср), что указывает на их монотонный характер. Это обстоятельство позволяет снизить объемы вычислений по сравнению с классическим методом Хука–Дживса.
Поскольку функции Э( Х опт, Х ср) и С( Х опт, Х ср) являются монотонными функциями оптимизируемых переменных, Парето-оптимальная область решений имеет вид, представленный на рис. 3.
Парето-оптимальная область, изображенная на рис. 3, получается за счет многократного решения задачи (1) для различных значений Этр. Сущность модифицированного метода прямого поиска решения оптимизационной задачи (1) заключается в том, что каждая 9-я оптимизируемая переменная разбивается на Nθ равных частей ∆ x оптθ , ∀ θ = 1, Θ , как показано на рис. 4.
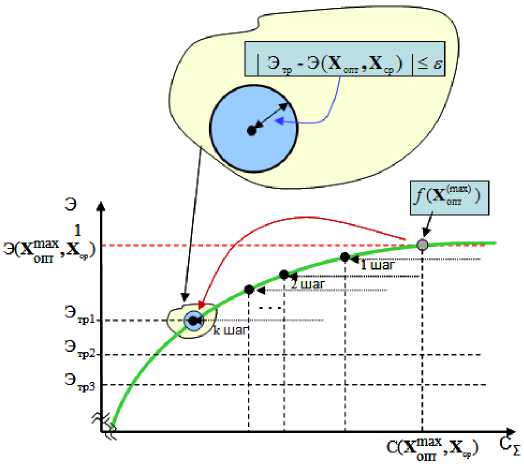
Рис. 3. Парето-оптимальная область решений
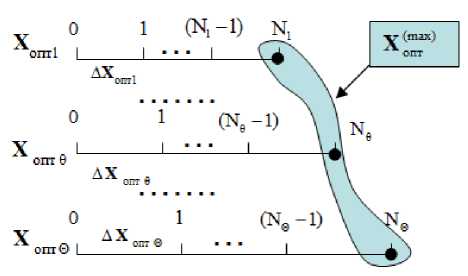
Рис. 4. Разбиение значений оптимизируемых переменных на равные части
Для целочисленных оптимизируемых переменных их значения составляют числа 0, 1, 2, …, N θ –1, N θ . Для непрерывных оптимизируемых переменных производится разбиение вида
0, & х опт ,2 А х опт ,...,N . А х опт , (19)
где Δ x опт – длительность единичного интервала разбиения.
Движение к минимуму стоимости осуществляется пошагово из точки X 0m ax) в пространстве оптимизируемых параметров (рис. 3, 4), соответствующей максимальным значениям каждой из оптимизируемых переменных Δ x о(mптaθx) (для каждого интервала с номером N θ , ∀ θ = 1, Θ ):
(max) (N 1 ) (N θ ) (N Θ )
опт опт1 ,..., опт θ ,..., опт Θ .
Изменение значений оптимизируемых переменных в сторону уменьшения приводит к снижению значений стоимости системы военного назначения (в силу монотонности функции стоимости С( Х 0ПТ , Х ср ) (рис. 3), поэтому Парето-оптимальная область имеет монотонный убывающий характер. При этом соответственно снижается и значение показателя эффективности системы.
Далее последовательно осуществляется снижение значений каждого из оптимизируемых переменных на одну дискрету ( А х 0N T “ 9 1) ) и производится моделирование функционирования исследуемой системы военного назначения в течение времени Трасп с полученными значени ям и оптимизируемых переменных. При этом значение стоимости системы С( А х ONV) ), V 6 = 1, 0 (N -1)
и значение ее эффективности Э( Δ х о (N пт θ θ ) ) запоминается. На каждом шаге снижения значений каждого из оптимизируемых переменных значение эффективности проверяется на удовлетво-рениеусловию (N -1)
Э А X опт-,' >) а э т, . (21)
Если условие (21) выполняется, то из полученного ряда значений стоимости системы выбирается ее минимальное значение, а значение переменной, соответствующей минимальному значению стоимости, фиксируется, и процедура снижения значений остальных переменных повторяется. На каждом последующем шаге из полученного ряда значений стоимости системы выбирается ее минимальное значение и производится проверка на удовлетворение условию
Процедуры проводятся до момента, когда начинает выполняться условие (18):
| Э р - Э ( Х опт , Х ср ) < 8.
Модификация метода заключается в том, что в отличие от классического алгоритма метода Хука-Дживса движение в направлении минимума стоимости осуществляется путем изменения значений характеристик систем только в сторону уменьшения.
Известное направление поиска в сторону уменьшения значений характеристик системы и проверка удовлетворения ограничению по эффективности функционирования системы на каждом шаге позволяют значительно сократить область поиска значений опт1,...,х оптθ ,..., х оптΘ
Таким образом,представленный метод решения оптимизационной задачи (1) дает возможность определить множество значений характеристик исследуемой системы, обеспечивающих требуемую эффективность этих систем в заданных условиях при минимуме суммар -ных затрат на создание и функционирование в пределах располагаемого времени.
Список литературы Модифицированный метод прямого поиска в оптимизационных задачах специальной структуры
- Reklаitis G.V., Revindran A., Regsdell K.M. Engineering Optimization. Methods and Applications. New York, 1983. Book 1. 346 p.
- Reklаitis G.V., Revindran A., Regsdell K.M. Engineering Optimization. Methods and Applications. New York, 1983. Book 2. 320 p.
- Ильичев А.В., Северцев Н.А. Эффективность сложных систем. Динамические модели. М.: Наука, 1989. 285 с.
- Сигорский В.П. Математический аппарат инженера. Киев.: Техника, 1977. 768 с.
