Модифицированный микромеханический гироскоп

Автор: Мирошниченко Игорь Павлович, Погорелов Вадим Алексеевич, Сизов Валерий Павлович
Журнал: Advanced Engineering Research (Rostov-on-Don) @vestnik-donstu
Рубрика: Машиностроение и машиноведение
Статья в выпуске: 2 (81) т.15, 2015 года.
Бесплатный доступ
Целью настоящей работы является разработка и обоснование нового вида микромеханического гироскопа, позволяющего обеспечить преобразование угловых скоростей вращения несущего основания в электрические сигналы одновременно относительно двух осей его вращения. Предложен и описан новый микромеханический гироскоп, который сохраняя положительные качества известных российских и зарубежных аналогов, отличается расширением функциональных возможностей за счет преобразования угловых скоростей вращения несущего основания в электрические сигналы одновременно относительно двух осей вращения. Предлагаемое техническое решение защищено в 2015 году патентом Российской Федерации на изобретение. Предлагаемый гироскоп может быть применен в системах навигации, ориентации и управления различными подвижными объектами в авиации, ракетно-космической технике, робототехнике, приборостроении, станкостроении, на транспорте и т.п.
Микромеханический гироскоп, акустические волны, поверхностные акустические волны
Короткий адрес: https://sciup.org/14250146
IDR: 14250146 | УДК: 531.383-11:531.714.7 | DOI: 10.12737/11612
Modified micromechanical gyroscope
The work objective is the development and validation of a new type micromechanical gyroscope which allows maintaining the transformation of angular rotation velocities of the supporting base into electrical signals simultaneously about two rotation axes. A new micromechanical gyroscope that both preserves positive qualities of the known Russian and foreign analogues, and differs in its enhancement due to converting the angular rotation velocities of the supporting base into electrical signals simultaneously about two rotation axes, is proposed and described. The presented technical solution is protected by the Russian Federation patent for invention in 2015. The proposed gyroscope can be applied in the navigation systems, reference systems, control systems of various mobile objects in the aviation, rocket and space technology, robotics, instrumentation, tool engineering, transport, etc.
Текст научной статьи Модифицированный микромеханический гироскоп
Машиностроение и машиноведение
полей ПАВ. Напротив активного ВШП после регулярной структуры инерционных масс на пластину нанесен поглощающий ВШП, выходы которого электрически соединены проводниками с комплексным регулируемым сопротивлением нагрузки [6]. Напротив активного ВШП после регулярной структуры инерционных масс на пластину пьезоэлектрика нанесен поглощающий ПАВ слой с коэффициентом отражения, близким к нулю, выполненный в виде клина, острием, направленным к регулярной структуре инерционных масс [7].
В [9] описан микромеханический гироскоп, который содержит пластину пьезоэлектрика, на одной стороне которой в шахматном порядке и в пучностях стоячей ПАВ нанесена регулярная структура инерционных масс, активные ВШП с отражающими структурами и измерительные ВШП суммарного поля ПАВ.
Принцип действия отмеченного гироскопа состоит в том, что нанесенную на пластину пьезоэлектрика регулярную структуру инерционных масс, расположенных в шахматном порядке, возбуждают в одном направлении стоячей ПАВ активными ВШП с отражающими структурами так, что инерционные массы находятся в ее пучностях . Суммарное поле ПАВ от регулярной структуры инерционных масс, состоящее из дифракционных и сигнальных от сил Кориолиса полей ПАВ, регистрируют измерительными ВШП в перпендикулярном для стоячей ПАВ направлении. При этом, дифракционное поле ПАВ на измерительных ВШП регистрируют как без вращения устройства, так и при его вращении, а сигнальное поле — только при вращении устройства.
Существенным недостатком описанных в [6–9] технических решений, сдерживающим их практическое применение, является ограничение их функциональных возможностей, обусловленное тем, что данные устройства обеспечивают регистрацию угловой скорости вращения несущего основания только относительно одного направления его вращения. Для регистрации угловых скоростей относительно двух направлений вращения несущего основания необходимо дополнительно установить второй аналогичный гироскоп. Это приводит к усложнению конструкции и увеличению ее стоимости.
Постановка задачи. Целью создания предлагаемого технического решения является расширение функциональных возможностей за счет преобразования угловых скоростей вращения несущего основания в электрические сигналы относительно двух осей его вращения.
Описание технического решения. Для достижения указанной цели предлагается микроакустомеханический гироскоп, содержащий несущее основание, регулярную структуру инерционных масс, размещенных в шахматном порядке, активные пьезоэлектрические преобразователи и измерительные ВШП суммарного поля ПАВ от регулярной структуры инерционных масс, состоящего из дифракционных и сигнальных от сил Кориолиса полей ПАВ . При этом несущее основание выполнено из изотропного материала.
На внешней поверхности несущего основания нанесена тонкая пленка из пьезоэлектрика с установленной на ней регулярной структурой инерционных масс и измерительными ВШП для каждого из направлений его вращения.
Измерительные ВШП размещены симметрично относительно положения регулярной структуры инерционных масс и перпендикулярно осям вращения несущего основания.
На внутренней поверхности несущего основания выполнен трапецеидальный выступ, большее основание которого обращено в сторону внешней поверхности несущего основания.
Активные пьезоэлектрические преобразователи установлены симметрично друг относительно друга на боковых поверхностях трапецеидального выступа и обеспечивают возбуждение продольных акустических волн в материале несущего основания в направлениях, определяемых углом Q.
Угол Q задан положением боковых поверхностей трапецеидального выступа относительно внешней поверхности несущего основания.
Сущность предлагаемого технического решения поясняется графическими материалами, приведенными на рис.1–2. На рис. 1 схематически представлен предлагаемый гироскоп (вид сверху), на рис. 2 — разрез А–А.
Предлагаемый микроакустомеханический гироскоп содержит несущее основание 1, выполненное из изотропного материала, на внешней поверхности которого 2 нанесена тонкая пленка из пьезоэлектрика 3 с установленными на ней регулярной структурой инерционных масс 4 и измерительными ВШП 5, б (относительно оси X ) и 7, 8 (относительно оси Y ) суммарного поля ПАВ от регулярной структуры инерционных масс 4, состоящего из дифракционных и сигнальных от сил Кориолиса полей ПАВ.
На внутренней поверхности 9 несущего основания 1 выполнен трапецеидальный выступ 10, имеющий малое основание 11, большее основание 12 и боковые поверхности 13. При этом большее основание 12 обращено в сторону внешней поверхности 2 несущего основания 1 (рис. 2).
Боковые поверхности 13 трапецеидального выступа 10 образуют с внешней поверхностью 2 несущего основания 1 угол Q , который выбирается из условия оптимального возбуждения ПАВ на внешней поверхности 2 несущего основания 1:
с i п — ii 111
Sin V , где иг — скорость продольных волн в материале несущего основания 1, ид — скорость ПАВ
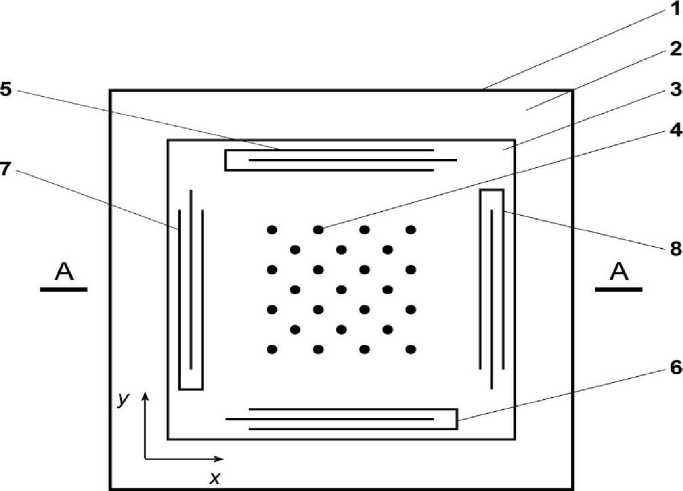
Рис. 1. Схема предлагаемого микроакустомеханического гироскопа (вид сверху)
А-А
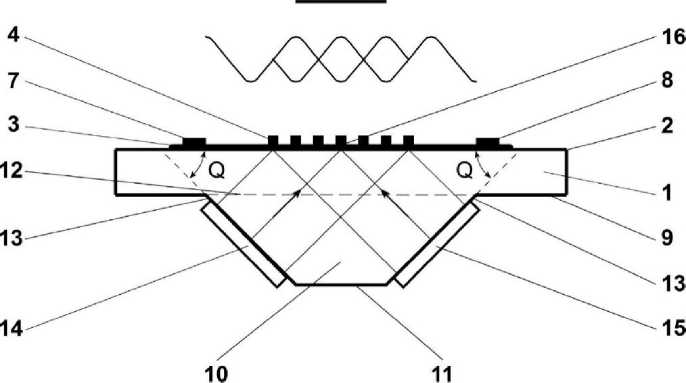
Рис. 2. Схема предлагаемого микроакустомеханического гироскопа (разрез А-А)
Угол Q задан положением боковых поверхностей 13 трапецеидального выступа 10 относительно внешней поверхности 2 несущего основания 1.
На боковых поверхностях 13 трапецеидального выступа 10 симметрично друг другу установлены активные пьезоэлектрические преобразователи 14 и 15, которые обеспечивают возбуждение продольных акустических волн в материале несущего основания 1 в направлениях, определяемых углом Q .
Измерительные ВШИ 5, б (относительно оси X ) и 7, 8 (относительно оси Y ) установлены на пленке 3 симметрично относительно положения регулярной структуры инерционных масс 4 и перпендикулярно осям вращения несущего основания 1.
Инерционные массы в регулярной структуре инерционных масс 4 размещены в шахматном порядке с расстояниями между ними, обеспечивающими преимущественное излучение в направлениях к измерительным ВШИ 5, б и 7, 8.
Принцип действия предлагаемого микроакустомеханического гироскопа заключается в следующем.
Машиностроение и машиноведение
Активные пьезоэлектрические преобразователи 14 и 15 возбуждают в несущем основании 1 продольные волны, которые при взаимодействии с внешней поверхностью 2 несущего основания 1 возбуждают ПАВ, бегущие в разные стороны по оси X .
В области 16 интерференции пучков продольных волн на внешней поверхности 2 несущего основания 1 по месту размещения регулярной структуры инерционных масс 4 образуется стоячая волна с расстояниями между пучностями, равными Як/2, где AR = Vr// ;/— частота возбуждения (рис.2).
Под воздействием стоячих волн массы регулярной структуры инерционных масс 4 совершают вертикальные (вдоль оси Z ) колебания и, в свою очередь, являются источниками ПАВ, которые распространяются вдоль осей Д'и Y .
Таким образом, из области 16 интерференции пучков продольных волн в стороны измерительных ВШП 5, б и 7, 8 распространяются бегущие волны, которые детектируются данными ВШП. В результате на выходах измерительных ВШП 5, б и 7, 8 возникают соответствующие сигналы.
При вращении несущего основания 1 относительно оси Д' на движущиеся вдоль оси Z массы воздействует сила Кориолиса, направленная вдоль оси Y :
F = 2m (ПУ)
где m — масса колеблющейся структуры; Q — угловая скорость вращения гироскопа; V — колебательная скорость массы.
Под воздействием этой силы генерируется дополнительная ПАВ, которая изменяет электрические сигналы на выходах ВШП 7 и 8. Это изменение пропорционально угловой скорости Q, направленной вдоль оси Д'и фиксируется соответствующим измерителем. На выходе ВШП 5 и б сигналы остаются практически неизменными.
При вращении несущего основания 1 относительно оси Y происходят аналогичные явления, а полезные сигналы возникают на выходах ВШП 5 и 6.
При одновременном вращении несущего основания 1 относительно осей Д' и Y полезные сигналы возникают на всех измерительных ВШП 5, б и 7, 8, причем уровень сигналов на выходах ВШП 7 и 8 соответствует скорости вращения относительно оси X , а уровень сигналов на выходах ВШП 5, б соответствует скорости вращения относительно оси Y . Таким образом, регистрируются полезные сигналы, позволяющие определить скорости вращения несущего основания 1 относительно двух осей его вращения.
Вывод. Разработан новый микроакустомеханический гироскоп, который сохраняя положительные качества известных аналогов, отличается по сравнению с ними расширением функциональных возможностей за счет преобразования угловых скоростей вращения несущего основания в электрические сигналы одновременно относительно двух осей вращения.
Предлагаемый микроакустомеханический гироскоп защищен патентом Российской Федерации на изобретение [10] и может быть применен в системах навигации, ориентации и управления различными подвижными объектами в авиации, ракетно-космической технике, робототехнике, приборостроении, станкостроении, на транспорте и т.п.
Список литературы Модифицированный микромеханический гироскоп
- Матвеев, В. А. Гироскоп -это просто/В. А. Матвеев. -Москва: Из-во МГТУ им. Н.Э Баумана, 2012. -191 с.
- Лукьянов, Д. П. Современное состояние и перспективы развития твердотельных микрогироскопов на поверхностных акустических волнах/Д. П. Лукьянов, Ю. В. Филатов, С. Ю. Шевченко//Гироскопия и навигация.-2011. -№3(74). -С. 75-87.
- Евстифеев, М. И. Основные этапы разработки отечественных микромеханических гироскопов/М. И. Евстифеев//Известия вузов. Приборостроение. -2011. -Т. 54. -№ 6. -С. 75-80.
- Калинин, В. А. Математическое моделирование гироскопа на ПАВ/В. А. Калинин, Ю. В. Лавров, В. А. Мельников, В. А. Шубарев//Электроника: Наука, технология, бизнес. Спецвыпуск. -2008. -С. 47-51.
- Varadan, V. K. Microsensors, microelectromechanical systems (MEMS), and electronics for smart structures and systems/V. K. Varadan, V. V. Varadan//Smart Mater. Struct. -2009. -№ 9. -P. 953-972.
- Пьезоэлектрический гироскоп: патент 2387951 Рос. Федерация: В. А. Калинин, В. Д. Лукьянов, В. А. Шубарев, В. А. Мельников. -№2009109735/28; заявл. 17.03.2009; опубл. 27.04.2010. Бюл. № 12. -9 с.
- Гироскоп на поверхностных акустических волнах: патент 2390727 Рос. Федерация: В. А. Калинин, В. Д. Лукьянов, В. А. Шубарев, В. А. Мельников. -№2009109734/28, заявл. 17.03.2009; опубл. 27.05.2010. Бюл. № 15. -8 с.
- Patent 7895892 В2 US. Apparatus and method for detecting a rotation/R. Aigner. -01.03.2011.
- Patent 6984332 В2 US. Micro-Electromechanical Gyroscope/V.K. Varadan, P.B. Xavier, W.D. Suh, J.A. Kollakompil, V.V. Varadan -10.01.2006.
- Микроакустомеханический гироскоп: патент 2543706 Рос. Федерация: Ю. В. Вахтин, И. П. Мирошниченко, В. П. Сизов, В. А. Погорелов. -№2013143420/28, заявл. 25.09.2013; опубл. 10.03.2015. Бюл. № 7. -8 с.
