Модифицированный помехозащищенный микроакустомеханический гироскоп

Автор: Мирошниченко Игорь Павлович, Сизов Валерий Павлович
Журнал: Advanced Engineering Research (Rostov-on-Don) @vestnik-donstu
Рубрика: Машиностроение и машиноведение
Статья в выпуске: 4 (87) т.16, 2016 года.
Бесплатный доступ
Целью настоящего исследования является создание нового модифицированного помехозащищенного микроакустомеханического гироскопа. Данная разработка позволяет преобразовывать в электрические сигналы угловые скорости вращения несущего основания одновременно относительно двух осей его вращения. Кроме того, повышается уровень полезного сигнала по сравнению с уровнем шумовых помех. Этим объясняется расширение функциональных возможностей нового модифицированного микроакустомеханического гироскопа по сравнению с имеющимися аналогами. Подробно описано, каким образом работает модифицированный гироскоп. Сущность его конструкции и функционирования поясняется графическими материалами. Предлагаемое техническое решение защищено патентом Российской Федерации на изобретение. Описанный гироскоп может быть применен в системах навигации, ориентации и управления различными подвижными объектами в авиации, ракетно-космической технике, робототехнике и т. п.
Микромеханический гироскоп, акустические волны, поверхностные акустические волны
Короткий адрес: https://sciup.org/14250252
IDR: 14250252 | УДК: 531.383-11:531.714.7 | DOI: 10.12737/22159
Modified microacoustomechanical noise-immune gyroscope
The work objective is to develop a new modified microacoustomechanical noise-immune gyroscope. It allows converting the angular rotation velocities of the support base into electrical signals on two axes of rotation simultaneously. In addition, the valid signal level is increased compared to the noise interference level. This explains the expandability of the new modified microacoustomechanical gyroscope compared to the existing analogues. The operating principle of the modified gyro is specified in detail. The concept of its design and performance is explained in drawings. The proposed technical solution is protected by the Russian Federation patent for the invention. The proposed gyroscope can be used in the navigation, positioning and control systems of various mobile objects in aviation, rocket and space technology, robotics, etc.
Текст научной статьи Модифицированный помехозащищенный микроакустомеханический гироскоп
Введение. В настоящее время в системах навигации, ориентации и управления различными подвижными объектами успешно используются микроакустомеханические гироскопы. Их применение позволяет оптимизировать массовые и геометрические характеристики указанных систем, повысить надежность, увеличить ресурс эксплуатации, снизить стоимость производства [1–5].
Известные микромеханические гироскопы [6–9] обладают существенным недостатком, сдерживающим их практическое применение. Данные устройства обеспечивают регистрацию угловой скорости вращения несущего основания относительно одного направления его вращения, а для регистрации угловых скоростей относительно двух направлений вращения несущего основания необходимо дополнительно установить второй аналогичный гироскоп. Это приводит к усложнению конструкции и увеличению ее стоимости. К существенным недостаткам гироскопов [6–9] можно также отнести низкий уровень полезного сигнала по сравнению с уровнем шумовых помех. Этим обусловлена необходимость применения регистрирующей аппаратуры с высокой чувствительностью, что также увеличивает стоимость устройства.
В [10, 11] предложен новый микроакустомеханический гироскоп, расчетно-теоретическое обоснование которого представлено в [12].
Данный гироскоп состоит из следующих частей:
-
— несущее основание;
-
— регулярная структура инерционных масс (РСИМ), размещенных в шахматном порядке;
-
— активные пьезоэлектрические преобразователи (АПП);
-
— измерительные встречно-штыревые преобразователи (ИВШП) суммарного поля поверхностной акустической волны (ПАВ) от РСИМ, состоящего из дифракционных и сигнальных полей ПАВ от сил Кориолиса.
Основание выполнено из изотропного материала, на его внешнюю поверхность нанесена тонкая пленка из пьезоэлектрика с установленными на ней РСИМ и ИВШП для каждого из направлений вращения. При этом ИВШП размещены симметрично относительно положения РСИМ и перпендикулярно осям вращения основания.
На внутренней поверхности несущего основания выполнен трапецеидальный выступ, большее основание которого обращено в сторону внешней поверхности несущего основания.
АПП установлены симметрично друг другу на боковых поверхностях трапецеидального выступа и обеспечивают возбуждение продольных акустических волн в материале несущего основания в направлениях, определяемых углом Q . При этом:
sinQ = V/vR, (1)
где V — скорость продольных волн в материале несущего основания 1; rr — скорость ПАВ; угол Q задан положением боковых поверхностей трапецеидального выступа относительно внешней поверхности основания.
Техническое решение [10, 11] позволяет обеспечить преобразование угловых скоростей вращения несущего основания в электрические сигналы одновременно относительно двух осей вращения, однако его существенным недостатком является низкий уровень полезного сигнала по сравнению с уровнем шумовых помех.
Постановка задачи. Целями создания предлагаемого технического решения являлись:
-
— расширение функциональных возможностей за счет преобразования угловых скоростей вращения несущего основания в электрические сигналы одновременно относительно двух осей вращения;
-
— повышение уровня полезного сигнала по сравнению с уровнем шумовых помех.
Описание технического решения. Для достижения указанных целей разработан новый модифицированный помехозащищенный микроакустомеханический гироскоп, графически представленный на рис. 1-5.
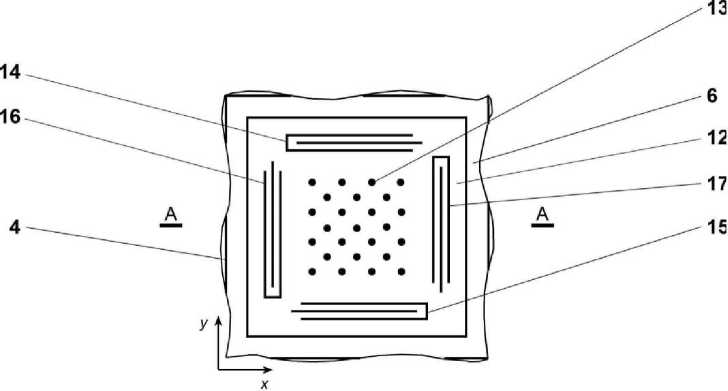
Рис. 1. Схема предлагаемого гироскопа (вид сверху)
Несущее основание 1 гироскопа (рис. 2) выполнено из изотропного материала. На внешней 2 и внутренней 3 поверхностях — трапецеидальные выступы 4 и 5 соответственно, совпадающие по форме и размерам и размещенные зеркально друг относительно друга.
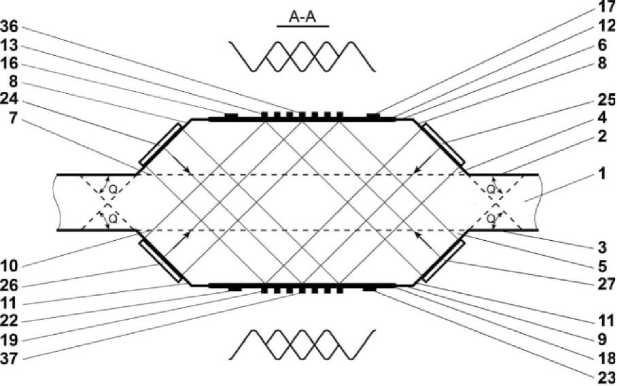
Рис. 2. Схема предлагаемого гироскопа (разрез А—А)
Выступ 4 имеет малое основание 6, большее основание 7 и боковые поверхности 8. При этом большее основание 7 обращено в сторону внутренней поверхности 3 основания 1. Выступ 5 имеет малое основание 9, большее ос- нование 10 и боковые поверхности 11. При этом большее основание 10 обращено в сторону внешней поверхности 2 основания 1.
На поверхность малого основания 6 выступа 4 нанесена тонкая пленка 12 из пьезоэлектрика с установленными на ней РСИМ 13 и ИВШП 14, 15 (вдоль оси х ) и 16, 17 (вдоль оси у ) (см. рис. 1) суммарного поля ПАВ от РСИМ 13, состоящего из дифракционных и сигнальных полей ПАВ от сил Кориолиса.
На поверхности малого основания 9 выступа 5 (см. рис. 2) нанесена тонкая пленка 18 из пьезоэлектрика с установленными на ней РСИМ 19 и ИВШП 20, 21 (вдоль оси х ) и 22, 23 (вдоль оси у ) (рис. 3) суммарного поля ПАВ от РСИМ 19, состоящего из дифракционных и сигнальных полей ПАВ от сил Кориолиса.
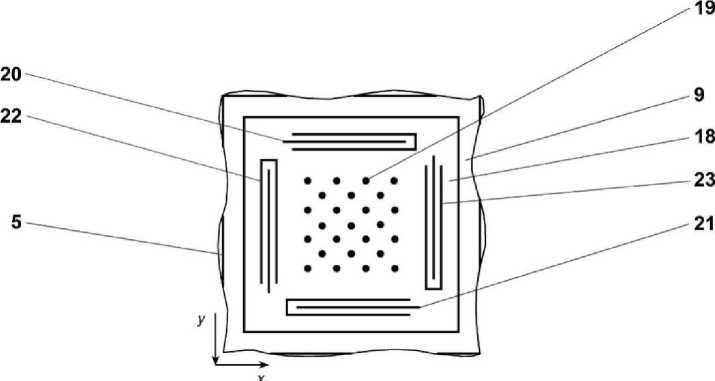
Рис. 3. Схема предлагаемого гироскопа (вид снизу)
Боковые поверхности 8 выступа 4 и боковые поверхности 11 выступа 5 (см. рис. 2) образуют соответственно с внутренней поверхностью 3 и внешней поверхностью 2 основания 1 угол Q , который выбирается из условия оптимального возбуждения на них волн Релея (1).
Угол Q задан положением боковых поверхностей 8 и 11 соответственно выступов 4 и 5 относительно поверхностей 3 и 2 основания 1.
На боковых поверхностях 8 выступа 4 симметрично друг другу установлены АПП 24 и 25, а на боковых поверхностях 11 выступа 5 симметрично друг другу установлены АПП 26 и 27, которые обеспечивают возбуждение продольных акустических волн в материале основания в направлениях, определяемых углом Q .
АПП 26 и 27 электрически соединены с генератором Г28 (рис. 4), а АПП 24 и 25 электрически соединены с генератором Г28 и инвертором И29. При этом АПП 24 и 25 обеспечивают возбуждение в противофазе по отношению к АПП 26 и 27.
А-А
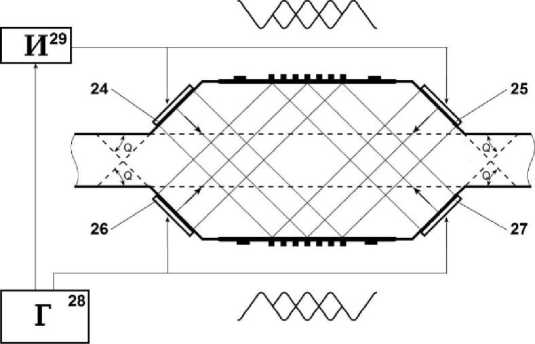
Рис. 4. Схема электрических соединений АПП
ИВШП 14, 15, размещенные на поверхности малого основания 6 выступа 4 (вдоль оси х ), и ИВШП 16, 17 (вдоль оси у ) установлены на тонкой пленке 12 симметрично относительно положения РСИМ 13 и перпендикулярно осям вращения основания 1.
ИВШП 20, 21, размещенные на поверхности малого основания 9 выступа 5 (см. рис. 3) (вдоль оси х ), и ИВШП 22, 23 (вдоль оси у ) установлены на тонкой пленке 18 симметрично относительно положения РСИМ 19 и перпендикулярно осям вращения основания 1 (см. рис. 2).
Выходы ИВШП 14 и 20, 15 и 21, 16 и 22, 17 и 23 попарно электрически соединены со входами сумматоров соответственно 30, 31, 32 и 33 (рис. 5). Выходы сумматоров 30 и 31, 32 и 33 соединены соответственно со входами сумматоров 34 и 35.
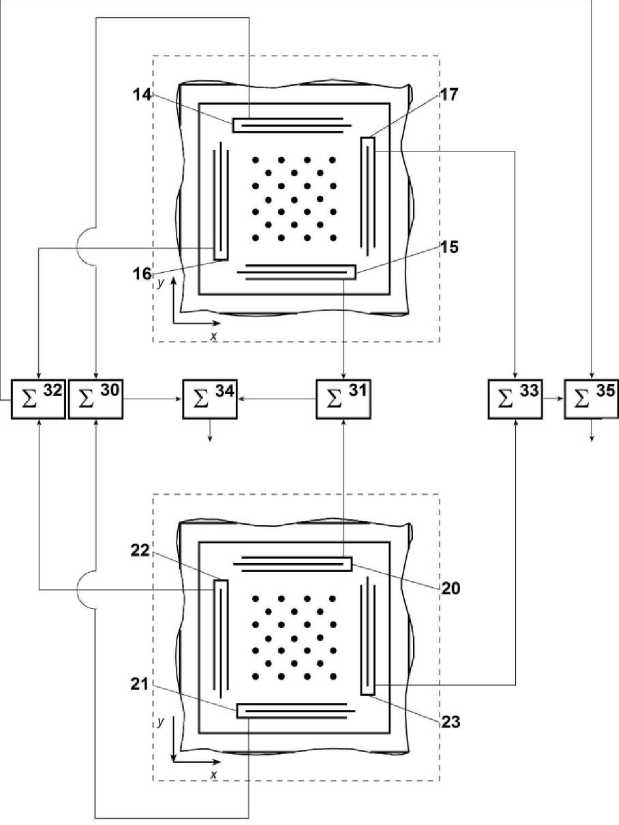
Рис. 5. Схема электрических соединений ИВШП
РСИМ 13 и 19 размещены в шахматном порядке с расстояниями между ними, обеспечивающими преимущественное излучение в направлениях к ИВШП.
Выходы сумматоров 34 и 35 соединены с системой регистрации (на рисунке не показана).
Предлагаемый гироскоп работает следующим образом.
При помощи генератора Г28 и инвертора И29 АПП 26, 27 и 24, 25 возбуждают в несущем основании 1 продольные волны, которые при взаимодействии с боковой поверхностью 8 малого основания 6 выступа 4 и боковой поверхностью 11 малого основания 9 выступа 5 возбуждают волны Релея, бегущие в разные стороны по оси x . При этом АПП 24 и 25 обеспечивают возбуждение в противофазе по отношению к АПП 26 и 27.
В областях 36 и 37 интерференции пучков продольных волн соответственно на поверхности 8 малого основания 6 выступа 4 и поверхности 11 малого основания 9 выступа 5 образуются стоячие волны с расстояниями между пучностями, равными XR/2, где XR = R Rff, f — частота возбуждения.
В этих областях размещены РСИМ 13 и 19, которые позволяют увеличить силу Кориолиса, возникающую при вращении гироскопа.
Под воздействием стоячих волн РСИМ 13 и 19 совершают вертикальные колебания вдоль оси z. Колеблющиеся массы, в свою очередь, являются источниками ПАВ, которые распространяются вдоль осей x и y. Таким образом, из областей 36 и 37 интерференции пучков продольных волн, где расположены РСИМ 13 и 19, в сторону ИВШП 14, 15, 16, 17, 20, 21, 22, 23 распространяются бегущие волны, которые этими ВШП детектируются. В результате на выходах ИВШП возникают соответствующие сигналы.
При вращении гироскопа вокруг оси x на движущиеся вдоль оси z структуры инерционных масс 13 и 19 воздействует сила Кориолиса, направленная вдоль оси y :
F = 2m [П 7], (2)
где m — масса колеблющейся структуры; Ω — угловая скорость вращения гироскопа; V — колебательная скорость массы.
Под воздействием этой силы генерируется дополнительная ПАВ, которая изменяет электрический сигнал на выходе ИВШП 16, 17 и 22, 23. Это изменение пропорционально угловой скорости Ω, направленной вдоль оси x . На выходе ИВШП 14, 15 и 20, 21 сигнал остается практически неизменным.
При вращении гироскопа вокруг оси y происходят аналогичные явления, а полезный сигнал возникает на выходе ИВШП 14, 15 и 20, 21.
При одновременном вращении гироскопа вокруг осей x и y полезный сигнал возникает на всех ИВШП, причем уровень сигналов на выходах ИВШП 16, 17 и 22, 23 соответствует скорости вращения вокруг оси x , а уровень сигналов на выходах 14, 15 и 20, 21 соответствует скорости вращения вокруг оси y . Таким образом, возникают сигналы, позволяющие судить о вращении основания 1 относительно двух осей. Сигналы с выходов ИВШП 14 и 21 поступают на входы сумматора 30; с выходов ИВШП 15 и 20 — на входы сумматора 31; с выходов ИВШП 16 и 22 — на входы сумматора 32; выходов ИВШП 17 и 23 — на входы сумматора 33, где производится суммирование с выходов соответствующих ИВШП. При этом ПАВ возбуждаются соответствующими волнами, которые излучаются АПП 24, 25 и 26, 27, на выходе каждого из сумматоров 30, 31 и 32, 33 уменьшаются. Это объясняется тем, что преобразователи 24, 25 и 26, 27 соответственно возбуждают волны в противофазе, а сигналы, возникающие под действием дополнительных ПАВ при вращении основания 1, находятся в фазе (т. к. Кориолисово ускорение всех масс имеет одинаковое направление). Сигналы, возникающие под действием описанных ПАВ, и на выходах перечисленных сумматоров увеличиваются.
Сигналы с выходов сумматоров 30 и 31 поступают на входы сумматора 34, а сигналы с выходов сумматоров 32 и 33 поступают на входы сумматора 35, где также производится суммирование сигналов со всех ИВШП, соответствующих осям вращения основания 1. Сигналы с выходов сумматоров 34 и 35 поступают в систему регистрации. При этом достигается существенное увеличение уровня полезного сигнала по сравнению с уровнем шумовых помех.
Заключение. Разработан новый модифицированный помехозащищенный микроакустомеханический гироскоп. Сохраняя положительные качества известных аналогов, он отличается более широкими функциональными возможностями. Это объясняется тем, что угловые скорости вращения несущего основания преобразуются в электрические сигналы одновременно относительно двух осей вращения, и повышается уровень полезного сигнала по сравнению с уровнем шумовых помех.
Предлагаемый гироскоп защищен патентом Российской Федерации на изобретение [13] и может быть применен в системах навигации, ориентации и управления подвижными объектами в авиации, ракетно-космической технике, робототехнике и т. п.
Список литературы Модифицированный помехозащищенный микроакустомеханический гироскоп
- Матвеев, В. А. Гироскоп -это просто/В. А. Матвеев. -Москва: Изд-во МГТУ им. Н.Э Баумана, 2012. -191 с.
- Лукьянов, Д. П. Современное состояние и перспективы развития твердотельных микрогироскопов на поверхностных акустических волнах/Д. П. Лукьянов, Ю. В. Филатов, С. Ю. Шевченко//Гироскопия и навигация. -2011. -№ 3 (74). -С. 75-87.
- Евстифеев, М. И. Основные этапы разработки отечественных микромеханических гироскопов/М. И. Евстифеев//Известия вузов. Приборостроение. -2011. -Т. 54, № 6. -С. 75-80.
- Математическое моделирование гироскопа на ПАВ/В. А. Калинин //Электроника: наука, технология, бизнес. Спецвыпуск. -2008. -С. 47-51.
- Varadan, V. K. Microsensors, microelectromechanical systems (MEMS), and electronics for smart structures and systems/V. K. Varadan, V. V. Varadan//Smart Materials and Structures. -2009. -№ 9. -P. 953-972.
- Пьезоэлектрический гироскоп: патент 2387951 Рос. Федерация: H03H9/25; G01C19/56/В. А. Калинин . -№2009109735/28; заявл. 17.03.09; опубл. 27.04.10, Бюл. № 12. -9 с.
- Гироскоп на поверхностных акустических волнах: патент 2390727 Рос. Федерация: G01P9/04; G01C19/56/В. А. Калинин . -№ 2009109734/28; заявл. 17.03.09; опубл. 27.05.10, Бюл. № 15. -8 с.
- Apparatus and method for detecting a rotation: patent 7895892 В2 US /R. Aigner. -Режим доступа: http://www.uspto.gov (дата обращения 08.11.16).
- Micro-Electromechanical Gyroscope: patent 6984332 В2 US /V. K. Varadan . -Режим доступа: http://www.uspto.gov (дата обращения 08.11.16).
- Микроакустомеханический гироскоп: патент 2543706 Рос. Федерация: G01C19/56; H03H9/25/Ю. В. Вахтин . -№ 2013143420/28; заявл. 25.09.13; опубл. 10.03.15, Бюл. № 7. -8 с.
- Мирошниченко, И. П. Модифицированный микромеханический гироскоп/И. П. Мирошниченко, В. А. Погорелов, В. П. Сизов//Вестник Дон. гос. техн. ун-та. -2015. -Т. 15, № 2. -С. 73-77.
- Мирошниченко, И. П. Метод скаляризации в задачах распространения поверхностных упругих волн во вращающемся трансверсально-изотропном полупространстве/И. П. Мирошниченко, В. А. Погорелов, В. П. Сизов//Вестник Дон. гос. техн. ун-та.-2015. -Т. 15, № 3. -С. 7-18.
- Модифицированный микроакустомеханический гироскоп: патент 2582483 Рос. Федерация: G01C19/56/И. П. Мирошниченко . -№ 2015104242/28; заявл. 09.02.15; опубл. 27.04.16, Бюл. № 12. -14 с.
