Модификация метода динамических измерений плотности морской воды с использованием автономных зондов-профилографов

Автор: И.Ю. Семыкина, Л.А. Краснодубец
Журнал: Научное приборостроение @nauchnoe-priborostroenie
Рубрика: Физика приборостроения
Статья в выпуске: 4, 2025 года.
Бесплатный доступ
Исследование относится к области методов определения вертикального профиля плотности морской воды in situ. Традиционные методы определения плотности морской воды ρ через CTD-параметры (электропроводность, температура, глубина) имеют многоэтапный характер, что усложняет их использование в реальном времени. Перспективным решением является применение динамических измерений с использованием автономных зондов-профилографов, которые, будучи оборудованы только одним датчиком давления, могут определять вертикальный профиль плотности морской воды со скоростью порядка 1 м/с. Однако текущая реализация данного метода требует информации о плотности морской воды на поверхности. Задачей данного исследования является разработка модификации метода динамических измерений, не требующего такой информации. В основу метода положен анализ математического описания движения автономного зонда-профилографа в поле гидростатического давления p при свободном погружении, на базе которого получено уравнение для определения ρ(p), не требующее априорной информации о плотности. Метод предполагает вычисление первой и второй производных гидростатического давления. Для снижения эффекта усиления шумов при дифференцировании предложено использовать фильтры-дифференциаторы и дана рекомендация по определению границы полосы подавления частот в зависимости от скорости профилирования. Проанализировано влияние скорости погружения зонда-профилографа на динамическую погрешность измерения давления и погрешность аналого-цифрового преобразования. Выявлен диапазон скоростей профилирования, в котором снижено влияние указанных погрешностей. Проведено моделирование, подтверждающее результативность предложенных решений. Полученные результаты могут быть применены при определении профиля плотности морской воды в океанологии, рыболовстве и подводных работах.
Плотность морской воды, автономный зонд-профилограф, динамические измерения, скорость профилирования, фильтр-дифференциатор
Короткий адрес: https://sciup.org/142246263
IDR: 142246263 | УДК: 551.46.083
Refinement of method of seawater density dynamic measurements using marine autonomous probe-profilers
The study described in the article relates to in situ determination of the vertical profile of seawater density ρ. Traditional density-determining methods by means of CTD parameters (conductivity, temperature, depth) have a multi-stage nature, complicating their use in real-time applications. A promising method is the dynamic measurements using a marine autonomous probe-profiler, which is equipped with only one pressure sensor and could determine the density profile at an order of velocity of 1 m/s. However, the current embodiment of this method requires knowing the seawater density on the surface. The objective of this study is to develop the refinement of the seawater density dynamic measurements method that does not require such information. The method is based on the analysis of the mathematical description of the probe-profiler motion in a field of hydrostatic pressure p during free immersion. It helps to obtain the equation for ρ(p) that does not require a priori information about density. The method involves calculating the first and second derivatives of hydrostatic pressure. To reduce noise amplification because of differentiation, the use of filter-differentiators is proposed, and the frequency suppression band boundary that depends on the profiling velocity is determined. The influence of the probe-profiler immersion velocity on the dynamic error of pressure measurement and the analog-to-digital conversion error is analyzed. The range of profiling velocities has been obtained in which the influence of the indicated errors is reduced. Simulations were conducted to confirm the effectiveness of the proposed method refinement. The obtained results can be applied in determining the seawater density profile in oceanography, fisheries, and underwater work.
Текст научной статьи Модификация метода динамических измерений плотности морской воды с использованием автономных зондов-профилографов
Данные о распределении плотности морской воды играют фундаментальную роль в изучении динамических процессов в мировом океане. С увеличением глубины плотность морской воды обычно возрастает, однако в результате различных факторов, таких как сезонные температурные колебания, испарение и другие, в некоторых зонах может наблюдаться поверхностное увеличение плотности, что приводит к формированию термохалинной циркуляции. Эта циркуляция существенно влияет на крупномасштабные океанические течения [1–3]. Информация о профиле плотности морской воды также имеет важное значение для исследований морской флоры и фауны, т.к. этот параметр оказывает влияние на распределение и миграцию биологических видов [4, 5]. Кроме того, данные о профиле плотности морской воды в сочетании с другими гидрологическими параметрами играют ключевую роль для оценки эффективности техниче- ских средств при реализации специализированных морских задач [6].
На практике распространены косвенные способы определения плотности по измеренным in situ другим параметрам морской воды. Например, стандарт WOCE предусматривает измерение CTD-параметров морской воды (электропроводность, температура, глубина), их последующую обработку и вычисление плотности морской воды с помощью термодинамического уравнения состояния морской воды TEOS-10 [7]. Основной недостаток такого способа — многоэтапность процедуры, что существенно затрудняет ее применение для определения плотности морской воды in situ непосредственно в процессе вертикального профилирования.
Другим распространенным подходом к определению плотности морской воды является использование измерений гидростатического давления. Например, для определения плотности морской воды в работах [8, 9] предложено использовать резервуар с эталонной жидкостью, в верхней и нижней частях которого размещаются дифференциальные датчики давления, а по измерениям разности давлений определяют плотность. Однако данный подход неудобен для оперативного зондирования, поскольку для обеспечения высокой точности определения вертикального профиля плотности при каждом измерении требуется гидростатическое равновесие, а также информация об установившейся средней температуре в резервуаре с эталонной жидкостью. Соблюдение этих условий приводит к значительной инерционности измерительных каналов, а следовательно, в процессе вертикального профилирования с высокими скоростями возникают существенные динамические искажения в измерениях плотности.
Существуют варианты использования измерений гидростатического давления, не требующие резервуара с эталонной жидкостью. Так, в работах [10–12], предложено определять плотность морской воды по разности давлений, измеренных с помощью системы датчиков давления в нескольких разнесенных в пространстве точках, например на границах отрезка, в узлах пирамиды и т.п. Достоинством такого подхода является инвариантность измерений плотности по отношению к температуре морской воды и скорости вертикального профилирования, однако получение разности давлений вычитанием двух измерений давления, полученных разнесенными в пространстве датчиками, как правило, вносит значительную погрешность.
Еще одним подходом к определению профиля плотности морской воды является использование метода динамических измерений. Данный подход разрабатывается в Институте природно-технических систем специально для оперативного зондирования и предполагает использование автономного зонда-профилографа с известными конструктивными параметрами, совершающего свободное вертикальное движение (погружение) со скоростью порядка 1 м/с, что существенно выше скорости профилирования CTD-зондами программы Argo [13], осуществляющих профилирование при всплытии, для которых на всплытие с горизонта 2000 м уходит 5–7 ч.
В одном из вариантов реализации данного подхода [14] вертикальные составляющие скорости и ускорения зонда, а также глубина непрерывно измеряются в процессе погружения с помощью бортовой навигационной системы, а вертикальный профиль плотности определяется по динамике изменения данных параметров. Однако бортовые навигационные системы, обеспечивающие измерение скорости и ускорения вертикального движения, а также глубины погружения с приемлемой точностью в течение многочасового вертикального про- филирования, крайне сложны по своей конструкции. Кроме того, этот вариант использования метода динамических измерений определяет профиль плотности морской воды в функции глубины, в то время как современные океанографические приборы определяют гидрологические характеристики в океанской толще как функцию от давления.
Для преодоления этих недостатков в [15] предложено оснастить автономный зонд-профилограф датчиком давления. Предполагается, что форма и геометрические параметры корпуса зонда остаются постоянными. Измерения давления проводятся во время погружения, когда окружающая среда находится в состоянии гидростатического равновесия. В процессе погружения зонд если и движется горизонтально, то лишь следуя за линиями тока воды. В таких условиях горизонтальные силы, действующие на зонд, пренебрежимо малы по сравнению с вертикальными. В условиях гидростатического равновесия изменение давления, регистрируемое профилографом при вертикальном перемещении зонда в стратифицированном океане, определяется исключительно изменением плотности морской воды. Тогда вертикальный профиль плотности морской воды определяется по динамике изменения давления, непрерывно измеряемого в процессе погружения, по формуле
p( p ) = P o [ 2 - - ( p( t ) + ap (t ) 2 ) ! , (i)
i g )
где ρ — плотность морской воды; p — измеряемое давление; ρ0 — плотность морской воды, измеренная на поверхности перед погружением зонда либо среднестатистическое значение плотности морской воды для конкретного региона; g — ускорение свободного падения для географической широты и глубины, на которой проводится вертикальное профилирование; p(t) и p(t) — соответственно первая и вторая производные p по времени t, вычисляемые разностным методом с использованием микроконтроллера; а — конструктивная константа xm a --------,
2Vb где Vb — объем корпусной части зонда; Sm — площадь поперечного сечения зонда; Cx — коэффициент лобового сопротивления. Сущность метода динамических измерений плотности морской воды с использованием автономного зонда-профилографа, оснащенного датчиком давления, показана на рис. 1.
Достоинствами описанного варианта является определение вертикального профиля плотности морской воды в функции давления и использование при этом только одного датчика давления. Однако
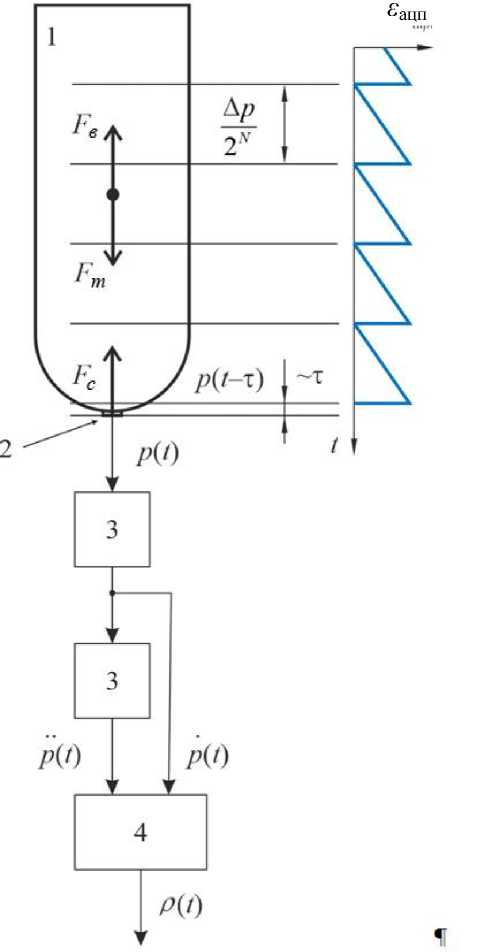
Рис. 1. Сущность метода динамических измерений плотности морской воды с использованием автономных зондов-профилографов.
1 — зонд, 2 — датчик давления, 3 — вычислитель производной, 4 — вычислитель плотности для реализации требуется априорная информация о плотности морской воды на поверхности. Кроме того, предполагается использовать производные от давления, а дифференцирование усиливает высокочастотные шумы, в том числе шумы аналогоцифрового преобразования. Таким образом, встает задача разработки модификации метода динамических измерений для определения вертикального профиля плотности с использованием датчика давления, не требующей априорной информации о плотности, а также обеспечивающей подавление шумов аналого-цифрового преобразования для снижения вызванной ими составляющей погрешности определения плотности морской воды. Решению этой задачи посвящено настоящее исследование.
МАТЕМАТИЧЕСКИЙ АППАРАТ
При погружении на автономный зонд-профилограф действует система сил [16], состоящая из силы тяжести
FT = mg, силы гидродинамического сопротивления
Fc = CxSm^ t )2, где z — глубина погружения зонда; z(t) — скорость движения зонда в морской воде, и суммарного давления со стороны окружающей морской среды, основная составляющая которого порождает выталкивающую архимедову силу
F e = PgV b .
В соответствии со вторым законом Ньютона, уравнение свободного погружения зонда записывается формулой
CS mz(t) = mg - PgVb - P —^mz(t).(2)
Датчик давления располагается в носовой части зонда, а измеряемое им давление равно
P (t ) = Pa + Pgz (t), где pа — атмосферное давление; при этом справедливо
p(t) = PgZ( t) и p( t) = Pgz( t).(4)
С учетом (3) и (4) уравнение свободного погружения зонда (2) представляется нелинейным дифференциальным уравнением, связывающим p(t), p(t) и p, а относительно p может быть рассмотрено алгебраическое уравнение второго порядка р2 f gV ^ + р (-g2) + fCxSmp (t )2 + p( t)] = 0,
\ m J ^ 2 mg J имеющее решение m C L 4V (.
P(P ) =— 1 + 1--T P(t ) + 2 V V v mg V
C x S m p ( t )2}
2 mg J J
z ( t )
„ 2Vb (m / Vb > g g-m I—-‘J ■
Сравнивая с (1), легко убедиться, что (5) имеет более высокую вычислительную сложность, требует больше и информации о конструкции и параметрах зонда, но не предполагает использование априорной информации о плотности морской воды.
Погрешность вертикального профилирования плотности ρ ( p ) зависит от большого числа факторов: погрешности, с которой известно давление p ( t ), погрешностей, с которыми в формуле (5) известны константы, точности выполнения арифметических операций и т.д. Поскольку единственным источником получаемой зондом информации о морской среде является датчик давления, рассмотрим преобразование сигнала давления более подробно (см. рис. 1). Из-за того, что датчик давления обладает инерционностью, за время отклика датчика давления τ зонд погрузится, формируя динамическую погрешность измерения давления εдин . В цифровом виде смена сигнала давления произойдет, только когда разница давлений на двух глубинах превысит шаг аналого-цифрового преобразования, формируя погрешность аналогоцифрового преобразования ε ацп . Следовательно,
P(t) = P(t - T) + AP5p + £дш + £ацп , где Δp — диапазон измерения датчика давления, соответствующий диапазону изменения давления при вертикальном профилировании до заданной глубины; δp — приведенная погрешность датчика давления.
Динамическая погрешность ε дин может быть выражена, как
а изменение давления p ( t ) будет носить характер близкого к линейному нарастания. Тогда в целях оценки величины погрешностей ε дин , и ε ацп можно записать
z ( t ) « v и p ( t ) » ‘0 4 vt , и p ( t ) » ‘0 4 v , (10)
где v — скорость профилирования.
Для обеспечения достоверности измерений датчиком давления необходимо, чтобы соблюдалось условие
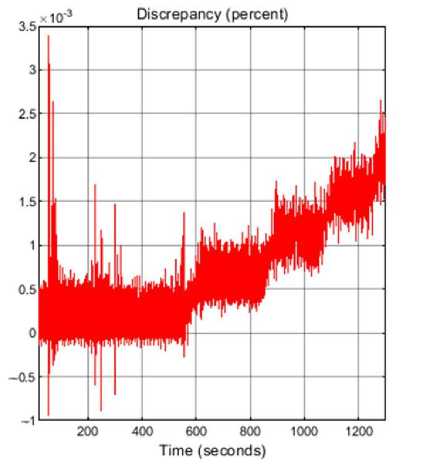
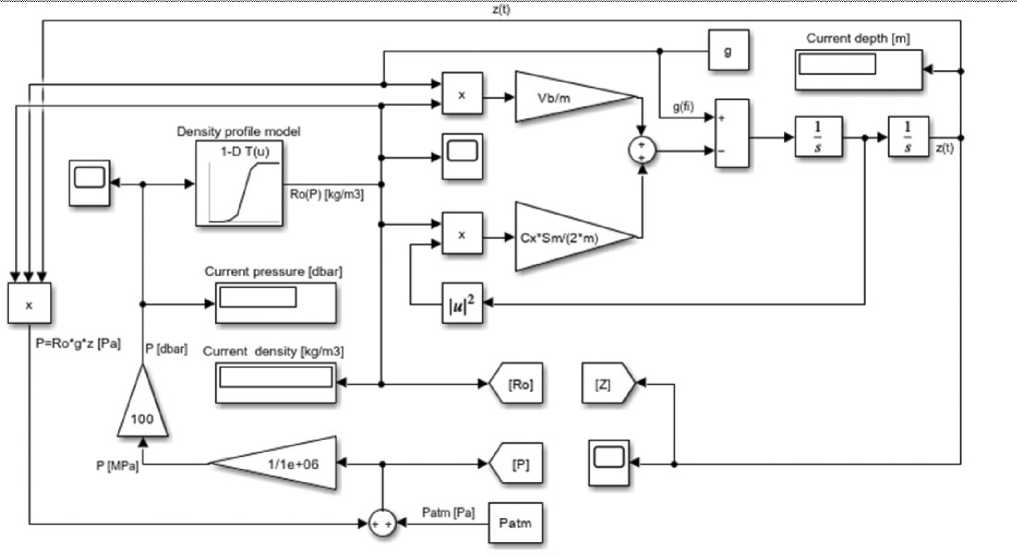
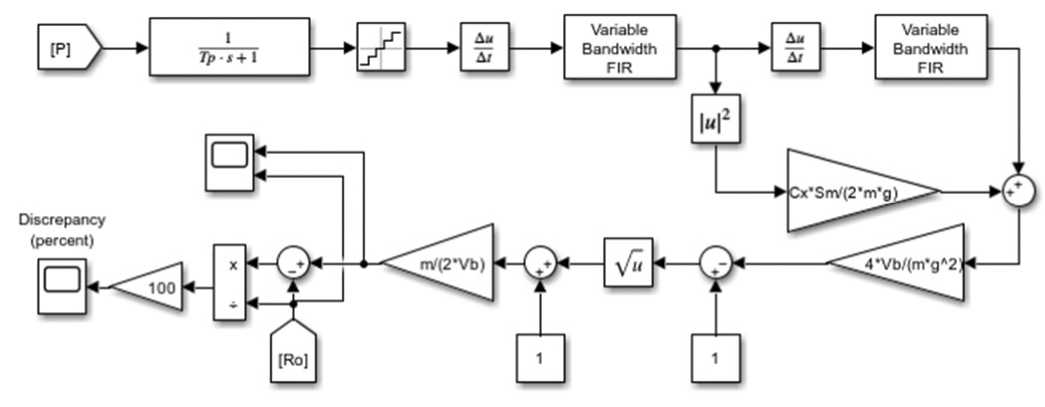
£дин 104vtp Sp. (11) Прямое вычисление p (t) усилит sацп в X раз, где ОN+‘1 f<4 2 10 πv Ap £дин ^ztt)T. dz Для медленно изменяющихся величин погрешность аналого-цифрового преобразования εацп носит гармонический характер, близкий к пилообразному с частотой Чтобы избежать усиления шумов аналогоцифрового преобразования, вычислители производных должны обладать свойством фильтрации, т.е. являться фильтрами-дифференциаторами. Учитывая реализацию на базе микроконтроллера, целесообразно использовать цифровые фильтры, например, фильтры-дифференциаторы с конечной импульсной характеристикой [17], модальные дифференциаторы на базе нормированных многочленов Баттерворта [18] или дифференцирующие фильтры с задержкой выходного сигнала [19]. Фильтры-дифференциаторы настраивают так, чтобы их амплитудно-частотная характеристика A(ω) на частоте fацп проходила ниже уровня 1 / X (рис. 2). Чтобы обеспечить это условие требуется, чтобы f ацп p (t) Ap/2N’ ацп п 2, что с учетом (7) и (10) позволяет записать: первая гармоническая составляющая которого — εацп(1) Ap /2 N 2π sin 2π p(t)^ Ap/2NJ. f = 2 N-‘104 —. п Ap В силу (4), скорость z( t) движения зонда будет близкой к постоянной, зависящей от соотношения конструктивных параметров зонда Vb, Sm, Cx, m и плотности морской воды ρ В то же время при низких скоростях профилирования v граница полосы подавления частот fп может оказаться близкой к диапазону рабочих частот fраб. Чтобы это предотвратить должно соблюдаться условие Рис. 2. Требуемая амплитудно-частотная характеристика фильтра-дифференциатора. Ap ApSp ---—---< v <---— 2 N-2104 т 104т При выбранной v с учетом (9) и (10) конструктивные параметры Vb, Sm, Cx и m зонда выбирают из соотношения CxSm (m - 1027Vb)« 52v2. Таким образом, выражения (5), (14), (17) и (18) составляют математическую основу модификации метода динамических измерений для определения вертикального профиля плотности морской воды, в которой используется один датчик давления, обеспечивается подавление шумов аналогоцифрового преобразования и снижение вызванной ими составляющей погрешности, а также не требуется априорная информация о плотности морской воды. fn > 2f^. (15) Поскольку p(t) носит характер близкого к линейному нарастания, величину fраб можно оценить по времени отклика датчика давления: 1 раб τ . В таком случае с учетом (6) и (10) условие (15) можно представить в виде 2N-11042. > 2. (16) Ap т Анализируя (11) и (16) совместно, можно получить соотношение, определяющее диапазон скоростей профилирования v в котором обеспечивается наименьшая погрешность при преобразовании сигнала давления ВАРИАНТ РЕАЛИЗАЦИИ Описанная модификация метода динамических измерений для определения вертикального профиля плотности морской воды может быть реализована с помощью функциональной схемы, показанной на рис. 3. Датчиком давления должен использоваться датчик в морском исполнении, например, с пьезокерамическими или емкостными керамическими чувствительными элементами [20] или изготовленный по технологии "кремний на сапфире" [21]. В качестве бортового микроконтроллера может использоваться 32-битный микроконтроллер, например семейства STM32, имеющий встроенный 12-раз-рядный аналого-цифровой преобразователь (АЦП), 16-битные порты ввода-вывода и работающий совместно с разными типами устройств памяти, например флэш-памятью. В качестве устройства связи может быть использован радиомодем. При необходимости, вместо встроенного в бортовой Рис. 3. Функциональная схема реализации метода. микроконтроллер, можно использовать внешнюю микросхему аналого-цифрового преобразователя, например сигма-дельта АЦП разрядностью от 16 до 24, что дополнительно снизит шумы аналогоцифрового преобразования. В качестве примера рассмотрим задачу получения вертикального профиля плотности морской воды на заданную глубину 1000 м. Этой глубине соответствует диапазон измерения датчика давления Δp = 10 МПа. При использовании датчика давления [21] приведенная погрешность составит δp = 0.25%, а время отклика τ = 1 мс. При разрядности аналого-цифрового преобразователя N =24 скорость профилирования v должна лежать в диапазоне от 0.238 до 25 м/с. Граница полосы подавления частот фильтра-дифференциатора в этом случае будет от 7.806 до 820 Гц, а при скорости профилирования v = 1 м/с составит fп ≈33 Гц. Оценить рассчитанный диапазон скоростей профилирования можно путем сравнения с другими известными зондирующими системами. Например, зонды системы Argo [13] осуществляют профилирование со средней скоростью 0.1 м/с. Эта величина ниже левой границы рассчитанного диапазона скоростей профилирования v, т.е. профили- рование с использованием разработанной модификации метода динамических измерений производится со значительно более высокими скоростями. РЕЗУЛЬТАТЫ МОДЕЛИРОВАНИЯ Исследование предложенной модификации метода динамических измерений для определения вертикального профиля плотности морской воды выполнено методом компьютерного моделирования с использованием пакета прикладных программ MatLab Simulink. Модель автономного зонда-профилографа в процессе свободного погружения показана в Приложении на рис. П1, там же дана модель измерения и вычислений на рис. П2. Вертикальный профиль плотности морской воды задан в виде 1-D Lookup Table по данным о реальном профиле плотности ρ(p), полученным от зонда Argo: 77° северной широты, атмосферное давления принято 101.325 кПа. Параметры зонда, использованные при моделировании, показаны в табл. Табл. Параметры автономного зонда-профилографа v, м/с Vb, м3 Sm, м Cx, безр. m, кг N, ед. Δp, МПа δp ,% τ, мс 1 5.655×10-3 0.123 0.87 11.619 24 10 0.25 1 Рис. 4. Расхождение результата динамических измерений плотности морской воды. В качестве фильтрующего элемента выбраны фильтры с конечной импульсной характеристикой, реализованные с помощью блока Variable Bandwidth FIR Filter. Настройка амплитудночастотной характеристики фильтра производилась с использованием инструмента filterDesigner. В качестве оконной функции использовалось окно Хэмминга. Моделирование работы предлагаемой модификации метода динамических измерений для определения вертикального профиля плотности морской воды показало высокую сходимость результатов. Для иллюстрации на рис. 4 приведены показания осциллографа Discrepancy (percent) (см. Приложение, рис. П2), отображающего расхождение в процентах между сигналами [Ro(t) model] и [Ro(t) measure], снимаемыми соответственно на выходе модели зонда и выходе модели измерения и вычислений. Как можно видеть, несмотря на производимую фильтрацию сигнал [Ro(t) measure] содержит возникающие в результате аналогово-цифрового преобразования шумы, однако рассчитанного по (12) усиления в X = 1.054×105 раз не наблюдается, а величина расхождения составляет доли процентов. Следует дополнительно отметить, что полученное расхождение является ошибкой метода и не может рассматриваться в качестве погрешности динамических измерений в метрологическом смысле. Получение количественной оценки погрешности динамических измерений плотности морской воды для предлагаемой модификации метода является предметом отдельного исследования. ЗАКЛЮЧЕНИЕ В работе предложена модификация метода динамических измерений для определения вертикального профиля плотности морской воды с использованием автономного зонда-профилографа, оборудованного датчиком давления. В основу положен анализ математического описания движения автономного зонда-профилографа в поле гидростатического давления p при свободном погружении, на базе которого получено уравнение для определения ρ(p), не требующее априорной информации о плотности. Разработанная модификация предполагает вычисление первой и второй производных гидростатического давления. Для снижения эффекта усиления шумов при дифференцировании предложено использовать фильтры-дифференциаторы и дана рекомендация по определению границы полосы подавления частот в зависимости от скорости профилирования. В качестве фильтров предложены и апробированы цифровые фильтры с конечной импульсной характеристикой. Проанализировано влияние скорости погружения зонда-профилографа на динамическую погрешность измерения давления и погрешность аналого-цифрового преобразования. Выявлен диапазон скоростей профилирования, в котором снижено влияние указанных погрешностей. Для скорости профилирования v = 1 м/с приведены результаты моделирования, показывающие, что ошибка метода не превышает 5×10–3%. ПРИЛОЖЕНИЕ Рис. П1. Компьютерная модель в MatLab Simulink: модель погружения зонда. Рис. П2. Компьютерная модель в MatLab Simulink: модель измерения и вычислений. Работа выполнена по госбюджетной теме ИПТС "Совершенствование технических средств и измерительных информационных технологий исследований природных вод" (№ госрегистрации 124012700512-1).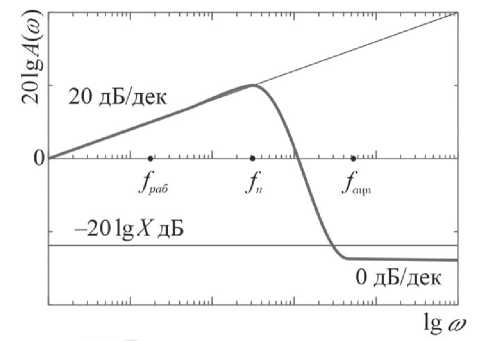


Список литературы Модификация метода динамических измерений плотности морской воды с использованием автономных зондов-профилографов
- 1. Robinson E., Hosegood P., Bolton A. Dynamical oceanographic processes im-pact on reef manta ray behaviour: Extreme Indian Ocean Dipole influence on local internal wave dynamics at a remote tropical atoll // Progress in Oceanography. 2023. Vol. 218. Id. 103129.
- DOI: 10.1016/j.pocean.2023.103129
- 2. Johnson L., Siegel D.A., Thompson A.F., et al. Assessment of oceanographic conditions during the North Atlantic EXport processes in the ocean from RemoTe sensing (EXPORTS) field campaign // Progress in Oceanography. 2024. Vol. 220. Id. 103170.
- DOI: 10.1016/j.pocean.2023.103170
- 3. Tozawa M., Nomura D., Yamazaki K., et al. Oceanographic factors determining the distribution of nutrients and primary production in the subpolar Southern Ocean // Progress in Oceanography. 2024. Vol. 225. Id. 103266. DOI: 10.1016/j.pocean.2024.103266
- 4. Xie Q., Gui D., Wang W., et al. Predictable oceanographic processes drive the formation of a distribution hotspot for Indo-Pacific humpback dolphins at a manmade harbor // Ocean & Coastal Management. 2024. Vol. 253. Id. 107160. DOI: 10.1016/j.ocecoaman.2024.107160
- 5. Chevallay M., Jeanniard du Dot T., Goulet P., et al. Spies of the deep: An animal-borne active sonar and bioluminescence tag to characterise mesopelagic prey size and behaviour in distinct oceanographic domains // Deep Sea Research Part I: Oceanographic Research Papers. 2024. Vol. 203. Id. 104214. DOI: 10.1016/j.dsr.2023.104214
- 6. Аносов В.С., Калашникова Е.В., Шарков А.М., Самотесов Ю.П. Выбор методов косвенного определения солености, скорости звука и плотности морской воды, в наибольшей степени отвечающих требованиям ВМФ // Навигация и гидрография. 2019. № 58. С. 54–61. URL: https://gningi.ru/images/journal/nig58.pdf
- 7. IOC, SCOR and IAPSO, 2010: The international thermodynamic equation of seawater – 2010: сalculation and use of thermodynamic properties. Paris: UNESCO, 2015. 196 p. URL: https://unesdoc.unesco.org/ark:/48223/pf0000188170
- 8. Гайский В.А., Гайский П.В. Возможности измерения локальной плотности морской воды в зондирующих приборах // Системы контроля окружающей среды. 2021. № 1 (43). С. 61-67. DOI: 10.33075/2220-5861-2021-1-61-67
- 9. Гайский В.А. Измеритель плотности жидкости и его варианты. Патент РФ RU2792263C2, 21.03.2023. URL:
- https://patents.google.com/patent/RU2792263C2/ru
- 10. Жемков Е.И. Метод и устройство гидростатического измерителя плотности морской воды // Материалы XII Международной научно-технической конференции "МСОИ-2011", 23-25 ноября 2011 г., в 2 т. М.: АПР, 2011. Т. 1 С. 95–97.
- 11. Федотов Г.А. Новая модификация гидростатического метода определения плотности морской воды // Фундаментальная и прикладная гидрофизика. 2013. Т. 6, № 1. С. 58–65. URL: https://hydrophysics.spbrc.ru/jour/article/view/1141
- 12. Гусев Л.Б., Федотов Г.А. Способ измерения плотности морской воды с подвижного носителя гидрофизической аппаратуры. Патент РФ RU2747854C2, 17.05.2021. URL: https://patenton.ru/patent/RU2747854C2?ysclid=mfqszmns2u898205723
- 13. Argo Program. URL: https://www.aoml.noaa.gov/argo/ (дата обращения 07.08.2025).
- 14. Краснодубец Л.А. Метод определения вертикального профиля плотности морской воды на основе измерений параметров движения неуправляемого автономного зонда // Системы контроля окружающей среды. 2017. № 4 (30). С. 8–15. DOI: 10.33075/2220-5861-2017-4-8-15
- 15. Краснодубец Л.А., Шишкин Ю.Е., Шаповалов О.Ю. и др. Морской автономный зонд-профилограф // Системы контроля окружающей среды. 2024. № 1 (55). С. 42–52. URL: https://msoe.ru/articles/2024/55-05/
- 16. Краснодубец Л.А., Забурдаев В.И., Альчаков В.В. Управление морскими буями-профилемерами как метод повышения репрезентативности термохалинных измерений. Модели движения // Морской гидрофизический журнал. 2012. № 4. С. 69–79. URL: https://xn--c1agq7a.xn--p1ai/repository/issues/2012/04/06/
- 17. Солонина А.И. Моделирование цифровой обработки сигналов в MATLAB. Часть 9. Моделирование цифровых преобразователей Гильберта и дифференциаторов программными средствами и средствами GUI FDATool MATLAB // Компоненты и технологии. 2009. № 7 (96). С. 106–110. URL: https://kit-e.ru/wpcontent/uploads/2009_07_106.pdf
- 18. Дылевский А.В. Применение многочленов Баттерворта для построения модальных дифференциаторов // Вестник
- Воронежского государственного университета. Серия: Системный анализ и информационные технологии. 2020. № 1. С. 28–35. DOI: 10.17308/sait.2020.1/2577
- 19. Зиатдинов С.И. Синтез дифференцирующего фильтра с линейной частотной характеристикой // Информационно-управляющие системы. 2015. № 4 (77). С. 119–121. URL: https://i-us.ru/index.php/ius/article/view/4363
- 20. DMK-456 Датчик давления морского исполнения. URL: https://xn--90ahjlpcccjdm.xn--p1ai/wpcontent/uploads/2018/11/opisanie-dmk-456.pdf (дата обращения 14.08.2025).
- 21. APR3914 Subsea Pressure Tranmsitter. URL: https://www.althensensors.com/uploads/products/datasheets/APR3914-Subsea-Pressure-Transmitter-en.pdf (дата обращения 14.08.2025).
