Морфизм между планируемыми рисками судовой операции и рисками при ее реализации

Автор: Гладышевский Михаил Александрович, Пеньковская Ксения Вячеславовна, Сарлаев Валерий Яковлевич
Журнал: Вестник Мурманского государственного технического университета @vestnik-mstu
Рубрика: Транспорт
Статья в выпуске: 4 т.19, 2016 года.
Бесплатный доступ
Установлено, что, с одной стороны, операции по планированию и реализации судового навигационного маршрута связаны единой целью, а с другой стороны, эти же операции должны рассматриваться независимо друг от друга, так как первая операция осуществляется в закрытой системе, а вторая - в открытой системе. Сформулированы цель и основные задачи, решаемые при планировании навигационного маршрута; показаны способы и методы обеспечения безопасного плавания судна с учетом сложных и опасных навигационных ситуаций, которые могут встретиться в любой момент времени и любых координатах составленного и реализуемого перехода. Получена зависимость между текущими и допустимыми рисками (в форме неравенства Чебышева), обеспечивающая возможность пересчета величины приемлемого (апостериорно заданного) риска, принятого при планировании судового навигационного маршрута, в величину текущего риска при реализации этого же маршрута. Показано, что морфизмы, связывающие риски планирования и риски реализации навигационного маршрута, с учетом определенных ограничений, накладываемых на их множество, позволяют оценить величину временного интервала существования соответствия между этими рисками.
Навигационный маршрут, планирование и реализация, морфизм рисков в операциях, безопасность мореплавания
Короткий адрес: https://sciup.org/14294951
IDR: 14294951 | УДК: 656.61.08:519.21 | DOI: 10.21443/1560-9278-2016-4-767-773
Morphism between the planned risks of ship operation and risks in its implementation
It has been found that on the one hand operations on planning and implementation of vessel navigation route are connected by a single purpose, and on the other hand these operations must also be considered independently of each other, since the first operation is performed in a closed system, and the second one - in the open system. The target and main problems to be solved in the navigation route planning have been formulated; some ways and methods to ensure the safe navigation of the vessel taking into account difficult and hazardous navigational situations that may arise at any time and any coordinates of the compiled and implemented transition have been shown. The dependence between the current and acceptable risks (presented in the form of the Chebyshev inequality) has been received; it provides the possibility of recalculating the value of the acceptable (given a posteriori) risk taken when planning the ship's navigational route in the current magnitude of the risk in the implementation of the same route. It has been shown that morphisms linking planning risks and risks of the navigation route accounting certain constraints imposed on their scores allow estimate the time interval of the existence of correspondence between these risks.
Текст научной статьи Морфизм между планируемыми рисками судовой операции и рисками при ее реализации
В современных условиях обеспечение безопасного мореплавания ориентировано на использование метода программно-целевого управления. При таком управлении состоянием безопасности мореплавания судов две последовательные фазы алгоритма этого метода – планирование и реализация – могут быть связаны морфизмами. Действительно, с одной стороны, система планирования и система реализации объединены целью судовой операции, а с другой стороны, планирование операции осуществляется в закрытой системе, а реализация – в открытой системе. Поэтому с практической точки зрения особенно важным является анализ возможности перерасчета апостериорных (допустимых) рисков, закладываемых на этапе планирования операции, в предвычисленные текущие риски, которые будут и должны возникать в процессе реализации плана этой судовой операции [1]. Иными словами, существует необходимость в оценке вероятности события вида ω ≥ ω 0 , где ω – некоторый продолжительно действующий случайный параметр опасности, например риск, определяющий навигационное состояние судна в фиксированный момент времени при реализации операции (Ρ(ω ≥ 0) = 1); ω 0 – априорно заданная величина приемлемого риска, которая гарантирует нужный уровень безопасности мореплавания в фазе планирования такой операции. Условие Ρ(ω ≥ ω 0 ) отражает возможность доминирования текущего предвычисленного риска над плановым допустимым риском, что будет снижать уровень безопасности мореплавания судна [2–4].
Материалы и методы
Мореплавание всегда сопряжено с риском, который в той или иной степени сопровождает судно. Нет возможности в каких-либо абсолютных единицах оценить степень риска во время судовождения, но можно и необходимо говорить об относительной его величине [5].
Всякое изменение обстановки по отношению к исходной позиции повышает степень риска и требует от судоводителя активных и грамотных действий, направленных на обеспечение безопасности мореплавания. Чем сложнее создается ситуация, тем больше требуется действий, которые бы "компенсировали" возникающую угрозу.
Целью планирования навигационного маршрута (перехода) является разработка способов и методов плавания судна с учетом сложных и опасных навигационных ситуаций, которые могут встретиться в любой момент времени и любых координатах составляемого перехода [6].
Навигационное планирование маршрута перехода в заданный порт или район промысла является важнейшим этапом подготовки, включает анализ всех обстоятельств, сопутствующих переходу, и сбор доступной судоводителю информации, имеющей отношение к навигационным и гидрометеорологическим условиям плавания.
Для оценки перехода и обстоятельств, при которых данный переход будет выполняться, должна быть собрана полная информация:
-
1) о гидрометеорологических условиях плавания (видимости, туманах, господствующих ветрах, штилях и штормах, постоянных и дрейфовых течениях, приливах и приливоотливных течениях, ледовой обстановке и т. д.);
-
2) навигационной обстановке перехода (общей длине пути, характеристике береговой черты, надводных и подводных опасностях, запретных и опасных районах, СНО, приметных пунктах и радиолокационных объектах, условиях подхода к портам захода и якорным стоянкам, портовых правилах и т. д.).
Навигационное планирование маршрута перехода включает также:
-
– подбор необходимых карт, планшетов, пособий для плавания и промысла, их корректуру;
-
– предварительную прокладку маршрута перехода на обзорной (или генеральной) карте, охватывающей весь район плавания (на карту наносятся предполагаемый маршрут перехода и обобщенные результаты изучения навигационно-гидрографических и географических условий: районы, имеющие ограничения по режиму плавания; границы территориальных вод; зоны или линии равных точностей определения места судна с помощью различных средств; положение и данные береговых радиотехнических средств, а также другие необходимые для судовождения сведения);
-
– детальную предварительную прокладку частей маршрута перехода, пролегающих через прибрежные воды, на путевых, частных картах и планах, а также "подъем" этих карт – нанесение на них дополнительной навигационной информации и выделение сведений, имеющих значение для обеспечения безопасности и соблюдения правил плавания;
-
– анализ навигационной, гидрометеорологической и правовой обстановки, состояния сырьевой базы в районе промысла с целью выбора мест лова (промысловых площадок), поисковых и промысловых курсов, средств и способов навигационного обеспечения промысла;
– предварительную подготовку промыслово-навигационных планшетов или карт, нанесение условных мест навигационных ориентиров, находящихся за рамками планшета, сеток изолиний, границ промысловых площадок, в пределах которых с заданной вероятностью обеспечивается удержание судна, буксирующего трал, схем расположения поисковых и промысловых курсов;
– составление штурманской справки, содержащей справочный материал по районам плавания и промысла, который нельзя было нанести на карты, описание маршрута перехода, а также краткое обоснование выбора путей, мест лова, поисковых и промысловых курсов, средств и методов навигационного обеспечения перехода и промысла с оценкой точности плавания.
Эффективное навигационное планирование перехода – важнейший элемент общей организации штурманской службы. Именно так определяется планирование предстоящего рейса судна в Резолюции ИМО A 285(VIII), позднее закрепленной в Международной конвенции ПДНВ – 78/95 [7].
Результаты и обсуждение
Оценка вероятности доминирования текущего риска над величиной приемлемого риска
Пусть задано множество ω ∈ Ω с ограничениями, которые накладываются на плотности распределения вероятности элементов ω, причем действует как основное ограничение вида
/(to) > 0, J/(®)dto = 1, так и дополнительные ограничения, заданные как
f(ω) ≤ c, f′(ω) ≤ 0,
∞ j tof (o)d to = m.
В достаточно общем случае ограничения, наложенные на плотность распределения вероятности величин рисков, можно записать так:
J 9i (to) f (to)dto = mi,
{f(ω), f′(ω)} ⊂ F,(2)
где m i – заданное число; ϕ i (ω) – заданные интегрируемые с весом f(ω) функции; F – некоторая область возможных значений функций f(ω), f′(ω). Тогда задача по оценке вероятности события ω ≥ ω 0 будет состоять в том, чтобы при условиях (1) и (2) найти максимум вероятности
Ρ(ω ≥ ω0),(3)
где ω – некоторое число, и функцию плотности вероятности f 0 (ω), обеспечивающую искомый максимум.
Запишем вероятность (3) в виде следующего функционала:
∞
P(to>to0) = j1[to-to0)/ (to)d to, где 1[ω – ω0) – смещенная единичная ступенчатая функция, равная нулю при ω < ω0 и равная единице при ω ≥ ω0.
Таким образом, поставленная задача по оценке вероятности события вида ω ≥ ω 0 может быть сведена к отысканию максимума функционала (4) при выполнении условий (1) и (2). Эта задача может быть сведена к задаче определения максимума для функционала
I x = J 1[ ®-® 0 ) f ( ® ) d ® + £ X i j ф i ( ® ) f ( to ) d rn = J T ( го , X ) f ( & )d го (5)
0 i = 1 0 0
при ограничениях (2) и заданных коэффициентах Лагранжа λ i , i = 1, l. Кроме того, в принятом функционале функция ψ(ω 0 , λ) определяется так:
l
T(rn, X) = 1[m - to o ) + £ X i ф i (m).
i = 1
Максимуму функционала (5) соответствует функция f0(ω, λ), удовлетворяющая при каждом ω условию max [ψ(ω, λ) f(ω)] = ψ(ω, λ) f0(ω, λ). (6)
Условие (6) имеет конечное или бесконечное число решений, если ψ(ω, λ) ≠ 0, а в особых случаях, когда ψ(ω, λ) = 0, уравнение (6) решения не имеет. Определив функцию f 0 (ω , λ) и значение λ 0 параметра λ, удовлетворяющего условию (1), можно записать решение поставленной задачи следующим образом:
∞ f 0 (to) = f 0 (to, x), P (to > too ) = J f 0 (to)dto.
Таким образом, процедура предлагаемого метода определения максимума Ρ(ω ≥ ω 0 ) и соответствующей этому максимуму функции f 0 (ω) позволит оценить вероятность свойства доминирования текущего риска над величиной приемлемого риска и упростить процедуры управления состоянием мореплавания и эксплуатацией судна в целом [8].
Оценка величины текущего навигационного риска по заданной величине приемлемого риска
Как следует из общего описания метода определения максимума Ρ(ω ≥ ω 0 ), функция f 0 (ω) существенно зависит от исходных условий (1), (2). Для получения практических оценок примем, что случайная величина риска ω ∈ Ω обладает математическим ожиданием m. Наличие математического ожидания на множестве рисков Ω позволяет конкретизировать условия (1) и (2), представив их так:
ϕ 1 (ω) ≡ 1, m 1 = 1, ϕ 2 (ω) = ω, m 2 = m, l = 2, f(ω) ≥ 0; (7)
∞∞ j Ф1 (to) f (o)drn = m1, j ф2 (to) f (a)drn = m2, (8)
Для уточненных начальных условий функционал (5) можно записать
∞ ix = j {i[to-®0) + x1 +x 2®} / (®)d®. 0
В связи с тем что условие (7) не ограничивает функцию сверху, эта функция может принимать бесконечные значения. Из первого уравнения (8) следует, что f(ω) не может принимать бесконечные значения на множестве значений ω положительной меры. Следовательно, значение параметров λ 1 , λ 2 , при которых функция
ψ(ω, λ) = 1[ω – ω0) + λ1 + λ2ω положительна на множестве значений ω положительной меры, рассматривать не нужно. Значения параметров λ1, λ2, при которых функция ψ(ω, λ) отрицательна на 0 ≤ ω < ∞, также не следует рассматривать, так как в этом случае из условия (6) следует f0(ω, λ) = 0, а это противоречит условию (8). Значит, следует рассматривать только значения λ1 = 0, λ2 = –1/ω0, при которых функция f0(ω, λ) равна нулю при всех значениях ω, кроме двух: ω = 0 и ω = ω0. В этих точках функция f0(ω, λ) не определяется условием (6). Учитывая условие (7), принимаем функцию f0 в виде f0(ω, ν) = ν1δ(ω) + ν2δ(ω – ω0), где ν1, ν2 – неопределенные неотрицательные множители, которые можно определить из условия (8). Подставив последнее выражение в формулу (8), получим
ν1, + ν2 = 1, ν2ω0 = m или
ν 2 = m/ω 0 ν 1 , = 1 – m/ω 0 .
Следовательно, искомая функция f0(ω) имеет вид f0(ω) = (1 – m/ω0) δ(ω) + m/ω 0(δ(ω – ω0)), (9)
и так как ν1 ≥ 0, то функция (9) справедлива, если ω ≥ m. Плотности вероятности (9) соответствует случайная величина с двумя возможными значениями ω = 0 и ω = ω0. Тогда максимум вероятности (3) можно определить как max Ρ(ω ≥ ω0) = ∫f0(ω)dω = m/ω0 при ω ≥ m или
Ρ(ω ≥ ω 0 ) = m/ω 0 при ω 0 ≥ m. (10)
Полученное неравенство является неравенством Чебышева [4], для которого при f(ω) = f 0 (ω) неравенство (10) превращается в равенство, а при f(ω) ≠ f 0 (ω) на множестве ненулевой меры следует использовать только строгое неравенство. Кроме того, неравенство обеспечивает возможность оценивать величину текущего навигационного риска по заданной величине приемлемого (апостериорно заданного) риска.
Соответствие между планированием судовой операции P 1 и процессом реализации этого плана P 2 по параметрам угроз – рискам
Неравенство, связывающее допустимый и текущий риски (10), позволяет, ориентируясь на теорию категорий, найти соответствия между планированием судовой операции P 1 и процессом реализации этого плана P 2 по параметрам угроз – рискам. Для этой цели введем категорию соответствий следующим образом. Пусть Q = (F, R, P) являются объектами категории, где F – количество пар (R, P) – "риск – операция". Тогда отображения вида
φ 1 : ω 0 → ω, φ 2 : P 1 → P 2
можно считать морфизмом соответствия Q 1 = (F 1 , ω 0 , P 1 ) в соответствие Q 2 = (F 2 , ω, P 2 ), если будет справедливо соотношение
φ* 2 ○ Q 1 ⊂ Q 2 ○ φ* 1 , (11)
где знак "○" обозначает композицию соответствий, а φ* i = 1, 2 – распространение отображений φ i на множество подмножеств. Соотношение (11) можно представить графически в виде диаграммы (рис.).
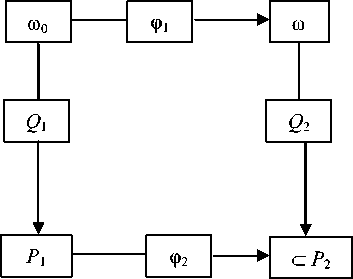
Рис. Fig.
Указанное соотношение (11) можно также формально записать следующим образом:
(φ 1 φ 2 )
Q1 → Q2, причем в последнем выражении стрелка означает морфизм в категории соответствий [9]. Допущения (1) и (2), а также неравенство (10) с учетом выражения (11) позволяют найти соответствие между планированием судовой операции и процессом реализации этого плана в рамках отношений морфизмов по параметрам угроз – рискам, которые будут определяться в интервале от величины ω до величины ω0.
Заключение
При обеспечении безопасности мореплавания судов две последовательные фазы алгоритма программноцелевого управления состоянием судна – планирование и реализация – связаны полной группой изоморфизмов. Поэтому полученное неравенство позволяет осуществлять перерасчет оценок приемлемых (апостериорно заданных) рисков, закладываемых в план судовой операции, в оценки текущих навигационных рисков, что обеспечивает поддержание безопасности мореплавания при реализации этой операции. Кроме того, морфизмы, обеспечивающие соответствие между планированием судовой операции и процессом реализации плана, и ограничения, накладываемые на множество рисков, позволяют найти интервал, в котором будут реализовываться данные риски при выполнении судовой операции.
Список литературы Морфизм между планируемыми рисками судовой операции и рисками при ее реализации
- Гладышевский М. А., Пасечников М. А., Пеньковская К. В. Организационно-технические структуры, обеспечивающие безопасную эксплуатацию судна/под общ. ред. В. И. Меньшикова. Мурманск: Изд-во МГТУ, 2008. 212 с.
- Смирнов А. Ж., Сиротюк А. А., Меньшиков В. И. Разрешение проблемных ситуаций с минимизацией ошибок сравнения результатов управления состоянием безопасности судна//Вестник МГТУ. 2011. Т. 14, № 3. С. 481-483.
- Кукуи Ф. Д., Анисимов Н. А., Анисимов А. А. Основные процессы в структурах безопасной эксплуатации судна/под общ. ред. В. И. Меньшикова. Мурманск: Изд-во МГТУ, 2008. 185 с.
- Феллер В. Введение в теорию вероятностей и ее приложения. М.: Мир, 1967. Т. 1, 2.
- Александров М. Н. Безопасность человека на море. Л.: Судостроение, 1983. 208 с.
- Лушников Е. М. Теоретическое обоснование методов и средств обеспечения навигационной безопасности мореплавания: автореф. дис. … д-ра техн. наук. СПб., 2000. 46 с.
- Международная конвенция ПДНВ -78/95. СПб.: ЗАО ЦНИИМФ, 1966. 552 с.
- Ольшамовский С. Б., Земляновский Д. К., Щепетов И. А. Организация безопасности плавания судов. М.: Транспорт, 1979. 213 с.
- Деруссо П., Рой Р., Клоуз Ч. Пространство состояний в теории управления. М.: Наука, 1970. 620 с.
