Наблюдатели состояния асинхронного электропривода на основе фильтра Калмана

Автор: Пахомов А.Н., Федоренко А.А., Федий К.С.
Журнал: Журнал Сибирского федерального университета. Серия: Техника и технологии @technologies-sfu
Рубрика: Исследования. Проектирование. Опыт эксплуатации
Статья в выпуске: 5 т.16, 2023 года.
Бесплатный доступ
В системах управления асинхронного электропривода для повышения динамических показателей используется векторный способ регулирования переменных. При этом с целью удешевления системы управления целесообразно применять различные наблюдатели состояния координат электропривода. Цель исследования - изучение работы фильтра Калмана в качестве наблюдателя состояния переменных асинхронного двигателя, а также проверка его чувствительности к вариациям параметров объекта управления. Для достижения поставленной цели использовались методы теории автоматического управления, в том числе метод переменных состояния. Численные исследования процессов в разрабатываемой идентификационной системе выполнены в вычислительной среде MATLAB (пакет прикладных программ SIMULINK). Проведенные исследования показали, что в качестве идентификатора состояния асинхронного двигателя, имеющего самую низкую чувствительность к вариации его параметров, является фильтр Калмана в переменных ток статора - потокосцепление ротора, что позволяет рекомендовать его для использования в качестве наблюдателя состояния в бездатчиковых системах асинхронного электропривода с векторным управлением.
Фильтр калмана, асинхронный электропривод, пространство состояний, переходный процесс, наблюдающее устройство
Короткий адрес: https://sciup.org/146282696
IDR: 146282696 | УДК: 621.3.078.4
Observers of the state of asynchronous electric drive based on the Kalman filter
In asynchronous electric drive control systems, a vector method of variable control is used to increase dynamic performance. At the same time, in order to reduce the cost of the control system, it is advisable to use various observers of the state of the coordinates of the electric drive. The purpose of the work is to study the operation of the Kalman filter as an observer of the state of variables of an asynchronous motor, as well as to check its sensitivity to variations in the parameters of the control object. To achieve this goal, methods of the theory of automatic control, including the method of state variables, were used. Numerical studies of processes in the identification system under development were performed in the MATLAB computing environment (SIMULINK application software package). The conducted studies have shown that the quality of the status identifier of an asynchronous motor having the lowest sensitivity to variations in its parameters is the Kalman filter in the variable stator current - rotor flow coupling, which makes it possible to recommend it for use as a state observer in sensorless asynchronous electric drive systems with vector control.
Текст научной статьи Наблюдатели состояния асинхронного электропривода на основе фильтра Калмана
Цитирование: Пахомов А. Н. Наблюдатели состояния асинхронного электропривода на основе фильтра Калмана / А. Н. Пахомов, А. А. Федоренко, К. С. Федий. Журн. Сиб. федер. ун-та. Техника и технологии, 2023, 16(5). С. 575–583. EDN: EYPOUM
В настоящее время в промышленности отмечается повышенный интерес в использовании и развитии асинхронного электропривода. Повсеместное применение частотно-регулируемого электропривода обусловлено высокими показателями регулирования, возможностью автоматизации технологического процесса, повышением энергоэффективности производства.
С целью повышения динамических показателей и возможностью регулирования момента на валу асинхронного двигателя (АД) целесообразно использовать векторный способ управления переменными АД [1]. Для исключения из системы электропривода дорогостоящих датчиков координат (скорости, момента, потокосцепления и др.) используются наблюдатели (идентификаторы) состояния, что позволяет перейти к бездатчиковому векторному управлению асинхронным электроприводом [2].
В статье рассматривается применение фильтра Калмана в качестве наблюдателя состояния переменных АД. Для обеспечения универсальности электропривода и повышения его надежности ставится задача идентификации текущего значения угловой скорости ротора АД. Актуальность задачи обусловлена стремлением разработчиков асинхронного электропривода исключить датчик скорости вращения ротора АД с целью удешевления системы и повышения её отказоустойчивости. Особенностью бездатчиковых систем управления электроприводов – 576 – является повышенная чувствительность к параметрическим возмущениям [3]. Поэтому в задачи исследований входит проверка робастности бездатчиковых электроприводов с различными идентификаторами состояния при изменении параметров двигателя.
Для реализации наблюдателей используются математические модели АД, состоящие из системы нелинейных дифференциальных уравнений. Рассмотрим два варианта математических моделей АД, различие которых заключается в выборе переменных состояния. В работе используется математическая модель обобщенной электрической машины в неподвижной системе координат α, β [4]. Для упрощения записи математических моделей АД и наблюдателей применяется аппарат пространства состояний.
В первом случае используется вектор состояния X и вектор управляющих воздействий U:
X = [iSa iSв VRа VRв ю]Т и U = [uSа uSв]Т, где isа, isв, usа, usв - компоненты пространственных векторов тока и напряжения статора АД; VRа, VRв — компоненты пространственного вектора потокосцепления ротора; ю - скорость вращения вала АД.
Тогда уравнения состояния АД можно записать в виде:
— = AX + BU и Y = CX, dt где Y = [iSа iSв]Т - вектор выходных переменных; матрицы динамики A, входа B и выхода C равны:
|
-аи 0 а12 аи 0 |
Ьг 0 |
|||
|
0 -ап -аи ап 0 |
0 Ьх |
[1 0 0 0 0 |
||
|
А = < |
«14 0 —^15 -«16 0 |
S В = < |
0 0 |
; с = [01000 |
|
0 «14 «16 "«15 0 |
0 0 |
|||
|
0 0 0 0 0 |
0 0 |
Следует отметить, что для упрощения матриц принято допущение постоянства (стабилизации) скорости АД, т.е. d ю / dt = 0.
Коэффициенты матриц A , B, C можно определить согласно выражениям [5]:
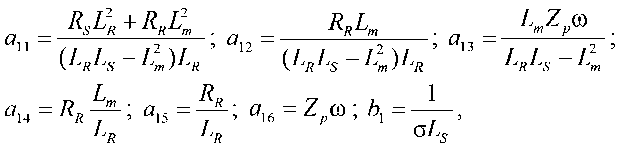
где LS, L R , L m - индуктивности статора, ротора и контура намагничивания АД; R S , R R - активные сопротивления статора и ротора АД; Zp – число пар полюсов АД.
Второй вариант математической модели АД отличается составом переменных состояния:
X = [iSa is в iR а iR в ю]Т, где iRа, iRв - компоненты пространственного вектора тока ротора АД.
В результате меняются матрицы A и B :
|
А = - |
П25 ^26 ^27 ^28 ^ ^26 ^25 ^28 — ^27 ^ 0 0 0 0 0 |
> и В = < |
' ^21 0 0 621 -622 0 0 -Ь2г .° 0 > |
= |
Коэффициенты матриц A, B можно определить согласно выражениям [6]:
Rs Vs VsZp® LmRR LmLRZpto а = —— Ч---— ---* а ------— ' а =----—-— * а =-----—
-
21 L L L -£2) ’ 22 L L ’ 23 L L ’ 24 L L -L2
LmRs LsRmZp® R$Rr Rs^rZp® л =---——-— * a —-----—— * л =----——— * a =—— *
-
25 LL -L2 ’ 26 LL -L2 ’ 27 L L -L2 ’ 28 L L -L2 ’
-
b =—- +----■ ь =
-
21 L L (L L -L2} 22 L L -L2 "
LS ^sV^R^S ^m) ‘-rJ-S ^m
Уравнения наблюдателя состояния системы, выполняемого, как правило, на базе микропроцессорных устройств, включают в себя вектор измерений Y k на k -ом шаге расчета (вектор из компонентов тока статора i S α и i S β ) и имеют следующий вид:
Хк=Ак.Хк_^В-ик_х;
Xk=Xk+Kk.(Yk-C-Xk), где Хк - вектор оценки состояний системы; Kk - матричный коэффициент, определяемый фильтром Калмана на основе выполненных измерений.
Оптимальное значение коэффициентов матрицы усиления Калмана K k зависит от характера шумов и случайных возмущений и обновляется на каждом шаге с помощью специального алгоритма, который реализован в соответствии с идеей адаптивной фильтрации:
где R - матрица ожидаемой дисперсии ошибки измерений, определяемой средней погрешностью измерений тока статора σ i (при нулевом среднем дисперсия ошибки равна матожиданию погрешности во второй степени):
– предсказанная на k -ом шаге оценки матрица ковариации ошибки:
Рк =А-Рк_х-АТ ^Q
В последнем выражении используется матрица ковариации случайных воздействий Q, значения которой определяются дисперсией соответствующих случайных переменных состояния системы, и скорректированная на ( k -1)-ом шаге матрица ошибки ковариации:
РкА=РкА-Кк_х -С.Рк_х
На каждом шаге рекуррентной процедуры обновляется матричный коэффициент K k таким образом, чтобы влияние шумов процесса и измерений на качество оценки вектора Xk минимизировалось [5–7].
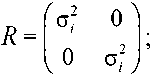
На рис. 1 показана схема имитационного моделирования АД (блок AD ) с наблюдателем (блок IDENT ) в программной среде MATLAB Simulink . В качестве исследуемого АД был принят двигатель типа АИР 90L4 с номинальной мощностью Р н = 2,2 кВт и синхронной частотой вращения n 0 = 1500 об/мин.
Блоки AD и IDENT созданы с помощью S -функций, содержащих уравнения АД, и наблюдателя в виде программного кода встроенного языка программирования MATLAB . В качестве математического описания АД принята классическая модель в переменных iS , ψ R [8]. На вход блока AD подаются компоненты вектора напряжения статора uS α и uS β , созданные блоком Sourse [9], а также момент нагрузки Mc . Входными сигналами для наблюдателя являются статорные напряжения u S α , u S β и токи i S α , i S β эталонной модели АД.
На рис. 2 представлены графики переходных процессов угловой скорости ω и с помощью рассмотренных вариантов фильтра Калмана при пуске вхолостую и последующем набросе номинальной нагрузки. В начале пуска видно отклонение графиков переходных процессов идентифицированной скорости от «эталонной», однако при приближении к установившемуся режиму и при набросе нагрузки фильтр Калмана достаточно точно позволяет оценить скорость АД.
Таким образом, оба варианта фильтра Калмана позволяют получить одинаковый результат идентификации скорости АД. Отклонение в динамических режимах можно объяснить отклонением стартовых значений матрицы ковариации, а также допущений, принятых при построении модели наблюдателя.
Рассмотрим работу наблюдателей при вариации параметров АД. На рис. 3 и 4 представлены графики переходных процессов оценки скорости вращения АД с помощью фильтра Калмана в переменных i S , i R при изменении на 10 % значений активных сопротивлений обмоток двигателя.
Нетрудно видеть, что при увеличении активного сопротивления статора (рис. 3б) и уменьшении сопротивления ротора (рис. 4а) фильтр Калмана в переменных iS , iR не справляется с задачей идентификации скорости АД.
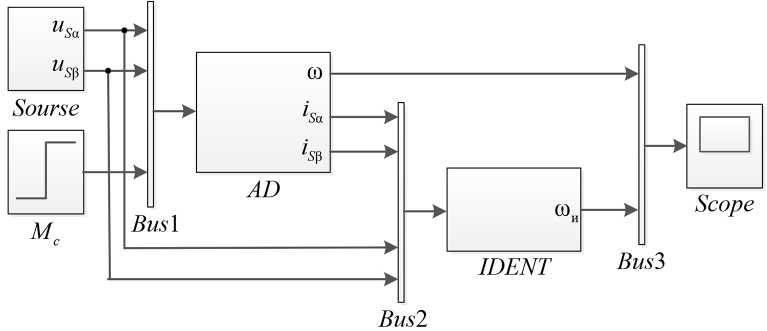
Рис. 1. Схема имитационной модели в среде MATLAB Simulink
Fig. 1. The scheme of the simulation model in the MATLAB Simulink environment
Рис. 2. Переходные процессы угловой скорости АД и её оценки фильтром Калмана
-
Fig. 2. Transients of the angular velocity of AD and its estimates by the Kalman filter
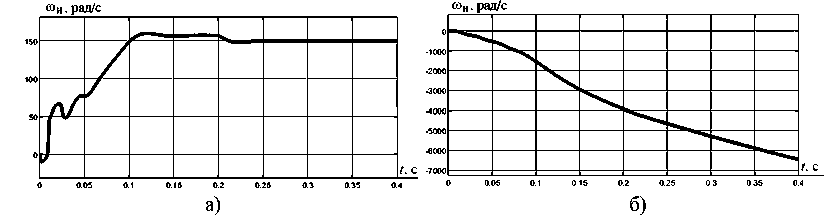
Рис. 3. Переходные процессы в электроприводе с фильтром Калмана в переменных iS , iR при снижении (а) и увеличении (б) активного сопротивления статора
-
Fig. 3. Transients in an electric drive with a Kalman filter in variables iS , iR , with a decrease (a) and an increase (б) in the active resistance of the stator
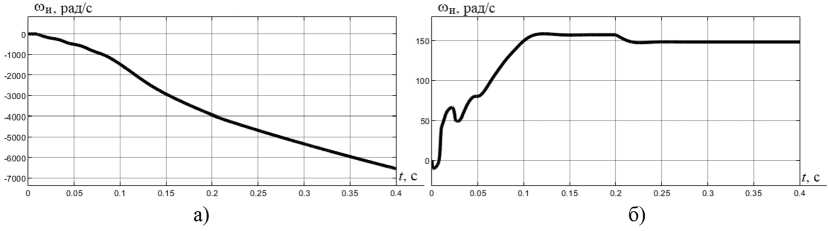
Рис. 4. Переходные процессы в электроприводе с фильтром Калмана в переменных iS , iR при снижении (а) и увеличении (б) активного сопротивления ротора
-
Fig. 4. Transients in an electric drive with a Kalman filter in variables iS , iR , with a decrease (a) and an increase (б) in the active resistance of the rotor
На рис. 5, 6 представлены переходные процессы идентифицированной угловой скорости вращения вала АД фильтром Калмана в переменных i S , ψ R при изменении на 10 % значений активных сопротивлений обмоток двигателя. Оценка фильтром переходных процессов угловой скорости выполняется во всех случаях.
На рис. 7 приведены переходные процессы оценки угловой скорости вращения вала двигателя рассмотренными вариантами фильтров Калмана при увеличении эквивалентного момента инерции в 5 раз. Причиной изменения указанного параметра может послужить подключение механизма к электроприводу, работавшему на холостом ходу. Фильтр Калмана в переменных iS , iR (рис. 7а) также не справляется с задачей идентификации скорости АД. Фильтр Калмана в переменных i S , ψ R выполняет поставленную задачу.
Проведенные исследования показали, что в качества идентификатора состояния АД, имеющего самую низкую чувствительность к вариации его параметров, является фильтр Калмана в переменных iS , ψ R , что позволяет рекомендовать его для использования в качестве наблюдателя состояния АД в бездатчиковых системах асинхронного электропривода с векторным управлением.
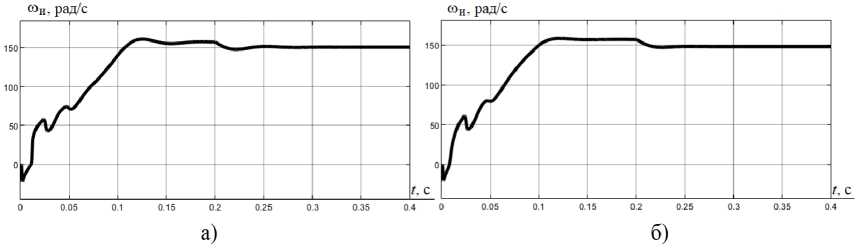
Рис. 5. Переходные процессы в электроприводе с фильтром Калмана в переменных i S , ψ R при снижении (а) и увеличении (б) активного сопротивления статора
Fig. 5. Transients in an electric drive with a Kalman filter in variables iS , ψ R , with a decrease (a) and an increase (б) in the active resistance of the stator
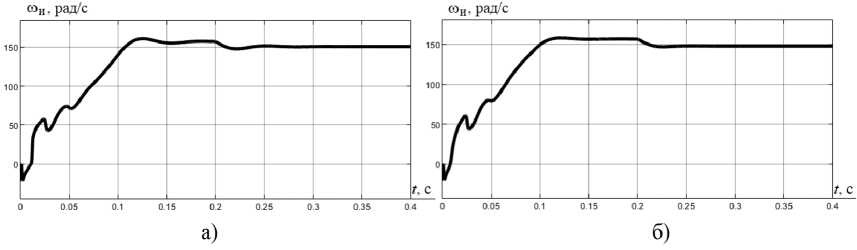
Рис. 6. Переходные процессы в электроприводе с фильтром Калмана в переменных iS , ψ R при снижении (а) и увеличении (б) активного сопротивления ротора
Fig. 6. Transients in an electric drive with a Kalman filter in variables iS , ψ R , with a decrease (a) and an increase (б) in the active resistance of the rotor
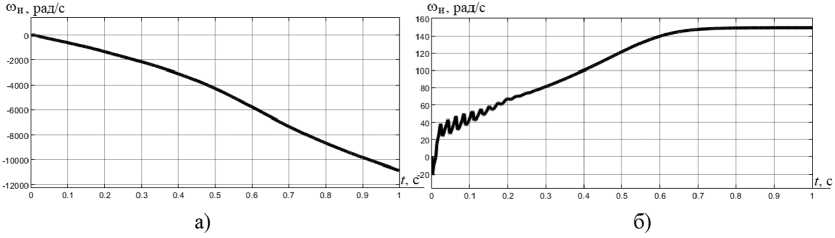
Рис. 7. Переходные процессы при увеличении момента инерции в бездатчиковом электроприводе с фильтром Калмана в переменных iS , iR (а) и iS , ψ R (б)
Fig. 7. Transients with an increase in the moment of inertia in a sensorless electric drive with a Kalman filter in variables iS , iR (a) and iS , ψ R (б)
Список литературы Наблюдатели состояния асинхронного электропривода на основе фильтра Калмана
- Виноградов А. Б. Векторное управление электроприводами переменного тока. Иваново.: ГОУВПО ИГЭУ, 2008. 298 с.
- Панкратов В. В. Маслов М. О. Синтез и исследование одной структуры бездатчикового асинхронного электропривода с векторным управлением. Электротехника, 2007, № 9, 9-14.
- Ланграф С. В., Глазырин А. С., Глазырина Т. А., Афанасьев К. С., Тимошкин В. В., Козлов Л. Е. Исследования параметрической робастности бездатчикового векторного асинхронного электропривода с идентификатором Калмана. Известия Томского политехнического университета, 2010, Т. 317, № 4, 120-123.
- Копылов И. П. Математическое моделирование электрических машин. М.: Высш. школа, 2001. 327 с.
- Калачев Ю. Н. Наблюдатели состояния в векторном электроприводе. М.: ЭФО, 2015. 80 с.
- Ланграф С. В., Глазырин А. С. Применение фильтра Калмана в моментном асинхронном электроприводе с векторным бездатчиковым управлением. Известия вузов. Электромеханика, 2009, № 6, 61-64.
- Глазырин А. С. Ланграф С. В. Идентификация скорости и момента асинхронного асинхронного двигателя с применением фильтра Калмана. Электричество, 2009, № 12, 61-63.
- Пахомов А. Н., Коротков М. Ф., Федоренко А. А. Сравнительная оценка качества управления асинхронным электроприводом конденсатного насоса с подчиненным и модальными регуляторами. Вестник СибГАУ, 2016, Том 17, № 2, 423-430.
- Брылев В. Е., Пахомов А. Н. Сравнительный анализ наблюдателей состояния асинхронного электропривода. Проспект Свободный - 2022: материалы XVIII Междунар. конф. студентов, аспирантов и молодых ученых, Красноярск: Сиб. федер. ун-т, 2022, 2980-2983.
