Надежность управления радиолинии при повторении команд управления на одной частоте

Автор: Ашимов Наиль Мударисович, Кравцов Александр Владимирович, Фомин Владлен Владимирович
Журнал: Спецтехника и связь @st-s
Статья в выпуске: 3, 2009 года.
Бесплатный доступ
Получено компактное аналитическое выражение, связывающее помехоустойчивость радиолинии с надежностью управления. Показано, что существенное возрастание надежности управления достигается при повторении команд на разных частотах при условии независимости уровней помех на этих частотах, то есть при многоканальной работе радиолинии.
Радиолиния, помехоустойчивость, надежность управления
Короткий адрес: https://sciup.org/14966990
IDR: 14966990
Текст научной статьи Надежность управления радиолинии при повторении команд управления на одной частоте
П од надежностью управления здесь понимается вероятность доставки команд радиолинии до объекта управления или, что то же самое, – вероятность правильного приема команды управления исполнительным прибором радиолинии в условиях реальных помех, действующих в эфире.
Надежность управления в условиях непреднамеренных (случайных) помех зависит от многих факторов: мощности излучения передатчика радиолинии управления (РЛУ), от характеристик радиотрассы и дальности управления, от помеховой ситуации и помехоустойчивости РЛУ. Повышение надежности управления путем увеличения мощности передатчика РЛУ является тривиальным решением, оно сопровождается увеличением массы и габаритов радиопередающего устройства, а также его стоимости, поэтому в большинстве случаев неприемлемо. Повышения надежности управления радиолинии следует добиваться, прежде всего, путем повышения ее помехоустойчивости.
Под помехоустойчивостью РЛУ понимают способность ее противостоять вредному мешающему действию помех. Термин «помехоустойчивость» следует употреблять по отношению к непреднамеренным (случайным) помехам. Случайная помеха обезличена, поскольку представляет собой сумму различных видов помех (атмосферных, станционных, индустриальных и космических помех, к которым добавляются внутренние шумы приемника) с различным уровнем и спектральным составом.
Помехоустойчивость радиолинии оценивается так называемой характеристикой помехоустойчивости, которая представляет собой зависимость пра- вильного приема команды управления Рк от отношения напряженности поля помех Еп, взятой в полосе 1 кГц, к напряженности поля сигнала Еc в точке приема.
Отношение Еп /Ес , при котором Рк = 0,5 , называется коэффициентом помехоустойчивости и является одним из основных показателей помехоустойчивости РЛУ. Характеристика помехоустойчивости строится, а коэффициент помехоустойчивости определяется при заданной и достаточно малой вероятности Рл ложного приема команды, являющейся другим показателем помехоустойчивости.
Работа выполняется в целях получения аналитического фундаментального выражения для надежности управления и обоснования нецелесообразности повторения команд управления на одной и той же рабочей частоте.

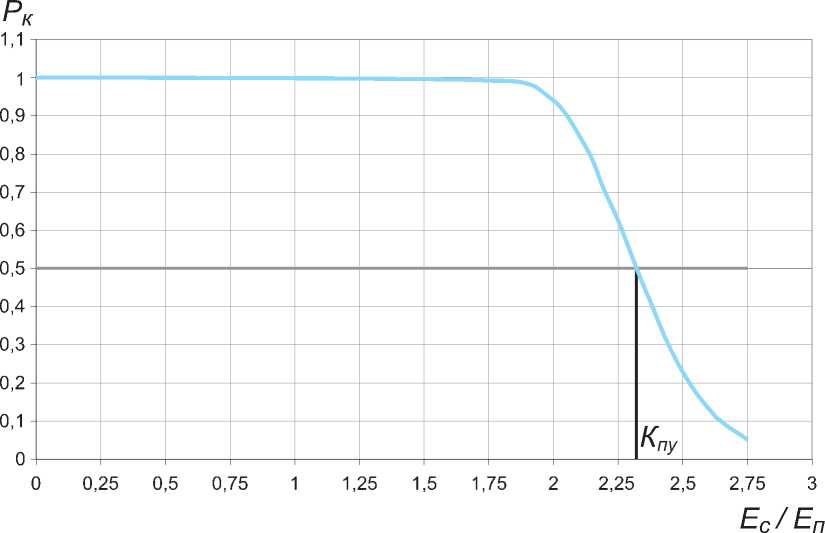
Рис. 1. Характеристика помехоустойчивости РЛУ
На рис. 1 показана характеристика помехоустойчивости РЛУ. Протяженность падающего участка характеристики зависит от числа элементов в команде (разрядности кода). Характеристика помехоустойчивости строится при заданной величине вероятности ( Рл ) ложных срабатываний исполнительного прибора (ИП) и длительности ( Тк ) команды управления. При увеличении Рл.зад характеристика помехоустойчивости смещается вправо и коэффициент помехоустойчивости возрастает. Последний увеличивается также при увеличении длительности команды управления.
Вероятность Рк представляет собой условную вероятность, поскольку зависит от отношения Еп /Ес . Уровни помехи Еп и сигнала Ес в точке приема являются случайными величинами. В большинстве случаев считается, что их распределение подчиняется логарифмическому нормальному закону. Таким образом, сама вероятность Рк становится случайной величиной. В этих условиях надежность управления определяется как математическое ожидание случайной величины Рк
^=$PKp(PK)dPK, (1) о
где р(Рк) – плотность вероятности случайной величины Рк .
Обозначим х = Еп /Ес и воспользуемся свойством инвариантности дифференциала вероятности:
p(PK) dPK=p(x)dx, (2)
являются независимыми случайными величинами, определим плотность распределения отношения Еп /Ес по формуле:
p(x) =JpcP(EC)P(XPC)dEc. (6)
где р(х) – плотность распределения от-
Во многих случаях уровни сигнала и помехи имеют логарифмически нор-
ношения Еп /Ес . Из (2) вытекает:
, . , , dx
P(PK)=P(X) — .
dPK
После подстановки (3) в (1) и соответс-
твующего изменения верхнего предела интеграла получаем
P,=§PK(x)p(x)dx . (4)
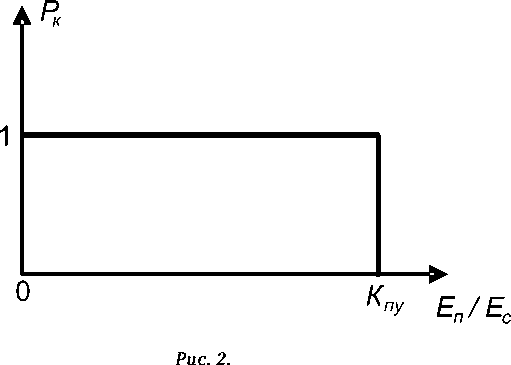
Выражение (4) является ни чем иным, как формулой полной вероятности, представленной в интегральной форме. Характеристика помехоустойчивости может быть аппроксимирована ступенчатой функцией ( рис. 2 ).
В этом случае надежность управления определяется по более простой фор-
муле:
Если р(Еп) и р(Ес) известны, то, имея в виду, что уровни сигнала и помехи
мальное распределение, очевидно, что распределение отношения х = Еп /Ес также будет подчиняться логнормаль-
ному закону:
где z = 20lg(Eп/Ес) , z0 и σ соответствен-
но математическое ожидание и среднеквадратичное отклонение Еп /Ес , равные
^0 — ^02 ^01 5 (8)
°г=^ЛО. (9)
Здесь z01 и σz1 – матожидание и СКО
уровня сигнала, z02 и σz2 – то же для
уровня помехи.
Надежность в этом случае будет опре-
деляться выражением

' 20 Ig К,-z/

где
-
X _v2
F(x) = ^= Г e^dy – (11)
интеграл вероятности Лапласа.
При повторении команд управления на одной и той же рабочей частоте уровни сигнала и помехи, под которыми понимаются их эффективные значения, сохраняются неизменными, если только предположить, что помеха флюктуационная (шумовая) и является стационарной, по крайней мере, на отрезке времени действия сигнала.
Мгновенные значения напряжения помехи, разделенные интервалом времени, равным длительности команды Тк , являются некоррелированными, следовательно, прием повторяющихся команд можно рассматривать как независимые события. Тогда вероятность правильного приема хотя бы одной из повторяющихся команд будет определяться по формуле:
Таблица 1.
|
Еп /Еc |
Рк1 |
Рк |
Еп /Еc |
Рк1 |
Рк |
|
1,857 |
0,99 |
1,0 |
2,38 |
0,4 |
0,8704 |
|
1,980 |
0,95 |
1,0 |
2,446 |
0,3 |
0,7599 |
|
2,05 |
0,9 |
0,9999 |
2,526 |
0,2 |
0,5904 |
|
2,14 |
0,8 |
0,9984 |
2,578 |
0,15 |
0,478 |
|
2,2 |
0,7 |
0,9919 |
2,645 |
0,1 |
0,3439 |
|
2,265 |
0,6 |
0,9744 |
2,75 |
0,05 |
0,1855 |
|
2,32 |
0,5 |
0,9375 |
2,97 |
0,01 |
0,0394 |
pK=i-a-pKj, (12)
где Рк1 – вероятность правильного приема команды при ее однократной посылке, к – число повторений команды на одной и той же частоте.
В табл. 1 представлены значения вероятностей Рк1 и Рк при к = 4 для РЛУ, коэффициент помехоустойчивости которой при однократной посылке команды равен Кпу = 2,32 .
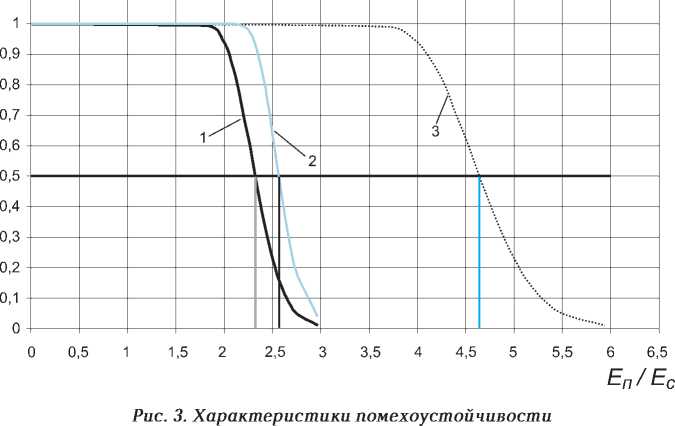
По данным табл. 1 на рис. 3 построены характеристики помехоустойчивости РЛУ с однократной посылкой команды с длительностью Тк (кривая 1) и РЛУ, команда которой повторяется 4 раза и общая ее длительность составляет 4Тк (кривая 2). Из рис. 3 и табл. 1 видно, что помехоустойчивость радиолинии при повторении команд на одной и той же рабочей частоте повышается незначительно (коэффициент помехоустойчивости возрастает от 2,32 до 2,56, т.е. примерно на 10%). Следовательно, весьма незначительным будет и повышение надежности управления. Вместо повторения команд можно увеличить длительность однократно посылаемой команды в 4 раза, что позволит увеличить коэффициент помехоустойчивости практически в 2 раза (кривая 3, рис. 3 ), следовательно, при той же энергии сигнала управления можно добиться существенно более высокой надеж-
Таблица 2.
|
Еп, мкВ/м |
10 |
20 |
30 |
50 |
100 |
200 |
500 |
|
Р(Еп) |
0,0304 |
0,133 |
0,2476 |
0,4495 |
0,734 |
0,9158 |
0,9912 |
ности управления, чем при повторении команд на одной и той же частоте. Это означает, что повторение команд управления не может быть рекомендовано для практического применения как способ повышения надежности управления, поскольку оно представляет собой нерациональное использование энергии сигнала.
Весьма эффективным способом повышения надежности управления в условиях воздействия как непреднамеренных, так и организованных помех является переход радиолинии на многоканальную работу, что предполагает передачу одной и той же команды по нескольким каналам связи, т.е. на нескольких рабочих частотах, при этом частоты должны быть разнесены на достаточно большую величину, чтобы уровни помех на них были независимыми. Надежность управления при этом определяется по формуле, аналогичной (12):
py = x-fl(x-pyi), (13) /=1
где N – число каналов связи, Рyi – надежность управления РЛУ по i -му каналу, если надежность управления по всем каналам одинакова, получаем:
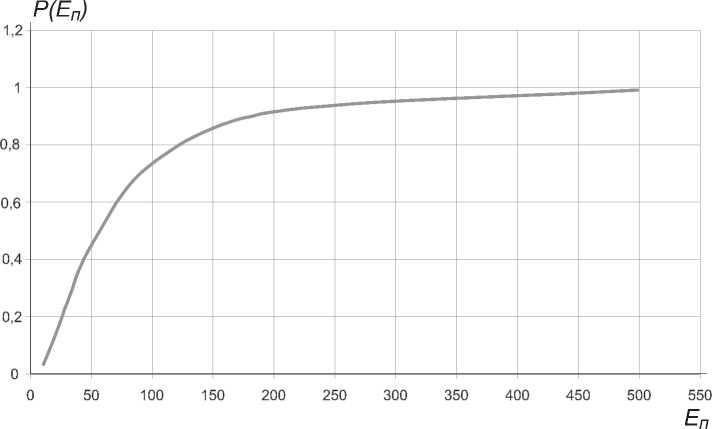
Рис. 3. Характеристики помехоустойчивости
Радикальное повышение надежности достигается только при многоканальной работе РЛУ, т.е. при четырехкратном повторении команд управления на разных частотах. Здесь в соответствии с (13) получаем Ру ∑ = 0,998 .
Надежность управления одноканальной РЛУ, работающей, длитель- ность которой в 4 раза больше (а коэффициент помехоустойчивости равен 4,64) составит Ру1 = 0,938, т.е. значительно больше, чем при четырехкратном повторении команды на одной и той же частоте, но существенно меньше, чем при многоканальной работе.

Выводы
Для примера рассмотрим надежность управления 4-канальной РЛУ, имеющей Кпу = 2,32 (по одному каналу). Предположим, что РЛУ функционирует в условиях помех, уровень которых подчиняется логнормальному закону распределения вероятности с параметрами z02 = 35 дБ, σz2 = 8 дБ. В табл. 2 приводятся значения интегральной функции распределения помех с указанными параметрами, а на рис. 4 показана сама интегральная функция распределения Р(En) .
Предположим также, что уровень сигнала в точке приема составляет Ес = 50 мкВ/м. При однократной посылке команды уровень помех, при котором Рк = 0,5 , будет равен En = EсКпу = 116 мкВ/м. В соответствии с рис. 4 находим надежность Рy1 = 0,789 . При повторении команд на одной и той же частоте величина коэффициента помехоустойчивости возрастает до 2,56, а надежность управления несколько увеличивается и составляет Ру = 0,8138 .
-
1. Получено компактное аналитическое выражение, связывающее помехоустойчивость радиолинии с надежностью управления, а также расчетную формулу для надежности управления при логнормальном распределении уровней сигнала и помех в точке приема.
-
2. Повторение команд управления на одной и той же рабочей частоте не приводит к существенному росту надежности управления, представляет собой нерациональное использование энергии сигнала и поэтому нецелесообразно.
-
3. Более высокая помехоустойчивость радиолинии и более высокая надежность управления достигается и без повторения команд при ее однократной посылке, но при той же общей длительности команды.
-
4. Наиболее высокая надежность управления достигается при повторении команд на разных рабочих частотах, то есть при многоканальной работе радиолинии, которую следует признать как один из эффективных способов борьбы как с непреднамеренными (случайными), так и с преднамеренными (организованными) помехами ■
Литература
1. Ашимов Н.М. Помехоустойчивость и помехозащищенность радиолиний управления. – М.: Изд.ВИУ, 2000. – 375 с.
Список литературы Надежность управления радиолинии при повторении команд управления на одной частоте
- Ашимов Н.М. Помехоустойчивость и помехозащищенность радиолиний управления. -М.: Изд.ВИУ, 2000. -375 с.
