Нагружение и прочность конструкций транспортного космического корабля при воздействии отсечки тяги двигателя третьей ступени ракеты-носителя

Автор: Безмозгий Иосиф Менделевич, Бобылев Сергей Степанович, Софинский Алексей Николаевич, Чернягин Александр Григорьевич
Журнал: Космическая техника и технологии @ktt-energia
Рубрика: Прочность и тепловые режимы летательных аппаратов
Статья в выпуске: 2 (17), 2017 года.
Бесплатный доступ
Статья посвящена исследованию динамической реакции конструкции транспортного грузового корабля (ТГК) «Прогресс» на отсечку тяги двигателя последней ступени ракеты-носителя (РН) «Союз». Импульсное воздействие на связку в составе ТГК и третьей ступени РН рассмотрено в двух вариантах: первый - типичная отсечка тяги, второй - с уменьшенным градиентом спада тяги. Исследования проведены на основе многоуровневого динамического моделирования конструкций. Реализованная технология решения задачи позволила получить следующие результаты: определить конфигурацию трансформированного, приведенного к любому поперечному сечению изделия, воздействия; дать исчерпывающую картину динамического отклика конструкции на импульсное воздействие; выделить класс конструкций с наиболее интенсивной реакцией на рассматриваемое импульсное воздействие; локализовать зону конструкции ТГК с максимальным уровнем напряженно-деформированного состояния. Из проведенного исследования сделаны выводы, основные из которых следующие: отсечка тяги последней ступени не дает энергоемких динамических эффектов; смягчение градиента спада тяги снижает уровень нагружения конструкции в 1,5раза; максимальный уровень напряжений реализуется в узкой зоне на одной из балок рамы нижнего приборного отсека с числом циклов менее 10; для типичной отсечки тяги двигателя запас прочности по пиковым напряжениям более двух, для модифицированной отсечки - более трех. Представленные в статье результаты показывают, что отсечка тяги третьей ступени РН не является расчетным случаем, не формирует напряженного состояния, близкого к критическому, и не оказывает влияния на прочность ТГК.
Тгк "прогресс", отсечка тяги рн, динамика конструкций, моделирование, нагружение, напряженно-деформированное состояние, прочность
Короткий адрес: https://sciup.org/14343557
IDR: 14343557 | УДК: 629.78.015.4
The effect of thrust cut-off of the third stage of the launch vehicle on the loading and strength of the transport cargo vehicle structure
This paper presents a study of the structural dynamic response of the Progress transport cargo vehicle (TCV) to a trust cut-off of the final stage of the Soyuz launch vehicle. The impulse effect on the structure consisting of TCV and launch vehicle third stage was studied in the following two cases: the first case with a typical thrust cut-off, and the second case with a reduced gradient of the thrust decay. The studies were performed based on a multilevel dynamical modeling of the structures. The implemented technology made it possible to obtain the following results, i.e. to determine the configuration of the transformed impact reduced to any cross section of the vehicle; give an exhaustive estimation of the dynamic structural response to an impulse action; categorize the structures with the most intensive response to the impulse action; localize the area of the TCV structure with the highest level of the strain-stress state. The studies made it possible to make the following main conclusions: the thrust cut-off of the final stage does not generate energy-intensive dynamic effects; the reduction of the thrust decay gradient reduces the structural loading level of by a factor of 1,5; a maximum stress level appears in a narrow area on one of the beams of the instrument compartment frame with a number of cycles less than 10; for the typical engine thrust cut-off the safety margin for peak stresses is more than two, and for a modified thrust cut-off it is more than three. The results presented in the paper show that the LV third engine thrust cut-off is not a design case. It does not create a stress condition close to a critical state and does not affect the strength of TCV
Текст научной статьи Нагружение и прочность конструкций транспортного космического корабля при воздействии отсечки тяги двигателя третьей ступени ракеты-носителя
безмозгий и.м.

бобылев с.с.

софиНский а.Н.

черНягиН а.г.
В перечне источников воздействий, определяющих прочность космического летательного аппарата (КЛА), двигательные установки ракеты-носителя (РН) занимают первое место. Тяга двигателя каждой ступени РН, являясь наибольшей из действующих на летательный аппарат сил, порождает статические, низкочастотные динамические, высокочастотные вибрационные, ударные и акустические нагрузки. Тем самым воздействие от двигательных установок в значительной степени определяет облик силовых конструкций корпуса, элементов крепления его навесного оборудования (НО) к корпусу, а также оказывает влияние на работоспособность и функционирование компонентов систем КЛА.
Для расчета воздействий на КЛА представляют интерес как стационарные режимы работы двигателей, так и переходные процессы: включение и отсечка двигательных установок [1, 2]. При этом режимы включения и выключения двигателей, нося явно выраженный импульсный характер, оказывают динамическое воздействие на конструкцию, вызывая ее отклик — реакцию, уровень которой зависит от динамических характеристик КЛА: их жесткостных, массовых и диссипативных составляющих. Наиболее резко конструкции КЛА реагируют на переходные процессы последней ступени РН по причине их близкого расположения к источнику воздействий и уменьшения совокупной массы объекта. Причем, наиболее характерным является динамическое поведение связки «последняя ступень РН + КЛА» как реакция на отсечку двигателя, когда израсходовано топливо последней ступени РН, и масса объекта динамического воздействия минимальна.
Целью настоящей статьи является исследование на основе динамического моделирования влияния профиля отсечки тяги последней ступени РН на уровень реакции, напряженно-деформированное состояние (НДС) и прочность конструкций КЛА во всем их многообразии. В статье дано описание конструкции связки последней ступени РН и транспортного грузового корабля (ТГК), выбранной в качестве объекта исследования. Рассмотрено различие в характере воздействий на связку, обусловленное изменением градиента спада тяги. Разработаны конечно-элементные динамические модели объекта, проведены расчетные исследования отклика конструкции на воздействия. Представлены характерные элементы конструкции ТГК, разработаны их локальные конечно-элементные модели (КЭМ). Проанализировано нагружение, рассчитано напряженно-деформированное состояние для элементов конструкции с динамическими характеристиками в различных частотных диапазонах, сделаны выводы.
принципы динамического моделирования
Общие принципы, на которых базируется динамическое моделирование в задачах вибропрочности, изложены в статье [3]. В силу целого ряда обстоятельств динамическое моделирование конструкций и процессов их нагружений практически осуществляется в несколько этапов с применением приемов, позволяющих с рациональными затратами получить, помимо решения с удовлетворительной точностью основной конечной задачи, промежуточные результаты, адекватные точности исходных данных соответствующего этапа.
Для описания реализованной технологии расчета конструкций при динамических воздействиях представляется целесообразным использование термина «шаговая дискретизация многоуровневого процесса динамического моделирования», поясняющего логику последовательности проводимых операций. В качестве начального шага строится модель первого уровня. Предельно простая, базирующаяся, в основном, на балочно-стержневых представлениях, она должна достаточно точно отражать главные динамические характеристики конструкции: низшие частоты, низшие формы колебаний и демпфирование. Большие сосредоточенные массы вводятся на этом уровне в модель в качестве осцилляторов с условной жесткостью.
На следующем шаге создается модель второго уровня . Это, как правило, часть изделия: блок, отсек или его агрегат. Модель этого уровня основывается на оболочечных представлениях корпуса и дискретном представлении всех значительных масс с их элементами крепления к корпусу.
Далее разрабатывается модель третьего уровн я — это проблемный регион с полным составом навесного оборудования и детальным моделированием всех элементов конструкции.
Заканчивается процесс моделированием «внутренностей» НО: приборов и агрегатов (клапанов, редукторов, фильтров, двигателей, турбонасосных агрегатов, газогенераторов, теплообменников и т. д.).
Шаговая дискретизация моделирования конструкции и динамических процессов имеет неоспоримое преимущество, позволяя
-
• осуществлять параллельный процесс разработки моделей разного уровня;
-
• вести параллельную экспериментальную верификацию этих моделей;
-
• получать модель высокого уровня любой степени подробности и детализации;
-
• проводить или повторять расчеты, соответствующие одному уровню моделирования;
-
• проводить расчеты поэтапно, разделяя на составляющие общий процесс разработки, экспериментальной отработки и эксплуатации изделия.
Очевидный недостаток в виде низкой достоверности моделей на первых шагах устраняется экспериментами с настройкой моделей по частотам и демпфированию.
Все этапы анализа проводятся с применением метода конечных элементов [4, 5].
объект исследования
В качестве объекта исследования выбрана связка последней ступени РН типа «Союз» и КЛА типа ТГК «Прогресс».
Последняя ступень РН [6] состоит из переходного (ПхО), межбакового (МбО), хвостового (ХО) отсеков и баков горючего (бак Г) и окислителя (бак О). Схема последней ступени РН показана на рис. 1.
В хвостовом отсеке расположен двигатель, закрепленный на нижнем днище бака О. Подача топлива из бака Г происходит по расходной магистрали внутри тоннельной трубы, проходящей насквозь через бак О. Стык последней ступени РН с ТГК осуществляется по торцевому шпангоуту ПхО РН.
ТГК состоит из агрегатного отсека (АО), нижнего и верхнего приборных отсеков (НПО, ВПО), отсека компонентов дозаправки (ОКД) и грузового отсека (ГрО) [7]. Общая схема ТГК, дающая представление о составе и видах НО, показана на рис. 2.
Нагружение ТГК при отсечке тяги, как и другие динамические процессы, с точки зрения прочности конструкций критично, прежде всего, для трубопроводов и элементов крепления НО из-за резонансных явлений в соответствующих частотных диапазонах. Все многообразие НО может быть разделено на четыре группы:
-
• одиночные элементы оборудования на наружной поверхности ТГК (рис. 2);
-
• одиночные элементы оборудования внутри ТГК, наиболее массивные из которых — базовый блок (ББ) комбинированной двигательной установки (КДУ), блоки питания (рис. 3);
-
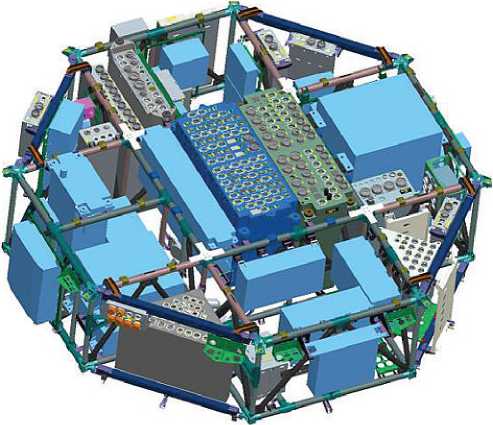
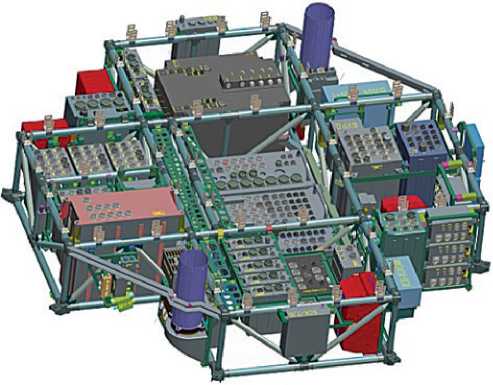
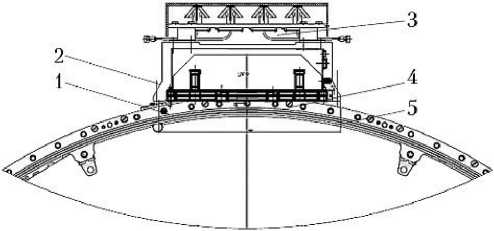
• элементы, установленные на приборных рамах внутри приборных отсеков (рис. 4);
-
• трубопроводы.
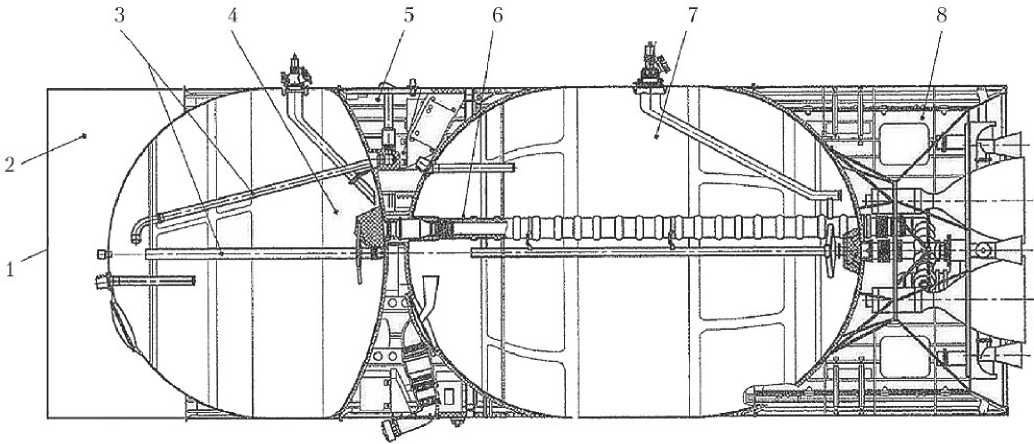
Рис. 1. Схема конструкции последней ступени ракеты-носителя: 1 — стык с транспортным грузовым кораблем; 2 — переходный отсек; 3 — внутрибаковые устройства; 4 — бак горючего; 5 — межбаковый отсек; 6 — тоннельная труба; 7 — бак окислителя; 8 — хвостовой отсек
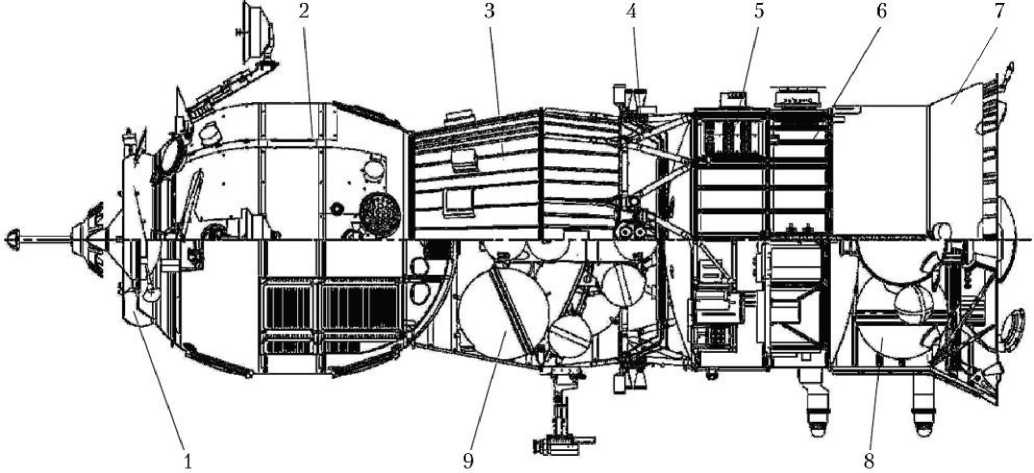
Рис. 2 . Схема конструкции транспортного грузового корабля: 1 — стыковочный агрегат; 2 — грузовой отсек; 3 — отсек компонентов дозаправки; 4 — переходный отсек; 5 — верхний приборный отсек; 6 — нижний приборный отсек; 7 — агрегатный отсек; 8 — базовый блок комбинированной двигательной установки; 9 — система дозаправки
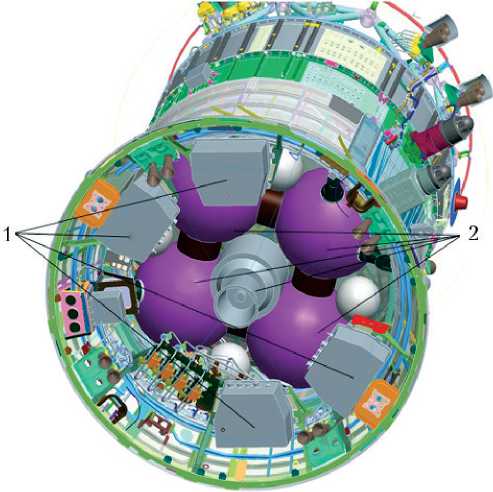
Рис. 3. Агрегатный отсек: 1 — блок 906В; 2 — базовый блок КДУ
динамическая модель связки рН + тгк
Динамическое воздействие на ТГК при отсечке тяги представляется в виде переменного по времени ускорения корпуса ТГК в сечении стыка с РН. Для определения силовых функций в поперечных сечениях ТГК разработана упрощенная модель (модель первого уровня). При построении динамической модели использованы результаты модальных испытаний натурного изделия. Представление о точности используемой модели дают динамические характеристики наиболее энергоемких тонов собственных колебаний в диапазоне до 70 Гц, полученные в расчете и при испытаниях (таблица).
реакция конструкции тгк на отсечку тяги двигателя
а)
б)
Рис. 4. Установка приборов на рамах приборных отсеков: а — нижнего; б — верхнего
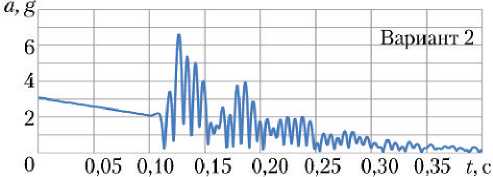
При исследованиях динамического отклика конструкции в различных поперечных сечениях изделия расчеты проводятся для двух вариантов силовых функций спада тяги (рис. 5) с использованием программного комплекса MSC NASTRAN [8, 9]. В первом варианте силовая функция соответствует типовому процессу отсечки двигателя. Эта силовая функция характеризуется наиболее резким спадом тяги, при котором его градиент достигает максимальных значений (до 48 000 кН/с). Во втором варианте циклограмма выключения соответствует отсечке двигателя с опережением закрытия клапана окислителя газогенератора на 0,09 с и характеризуется более плавным спадом тяги на первом этапе.
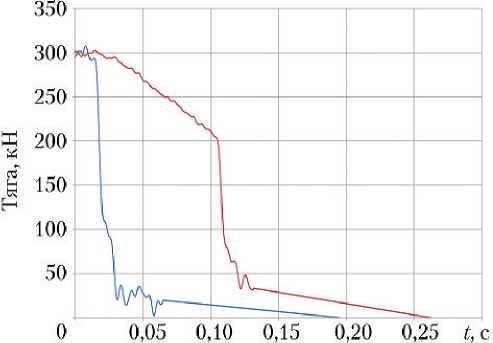
Рис. 5. Изменение тяги двигателя при останове: — — вариант 1; — — вариант 2
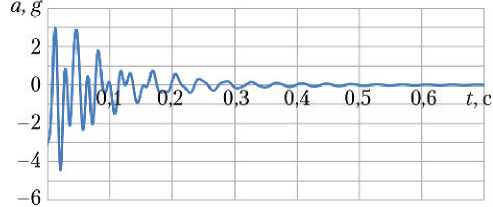
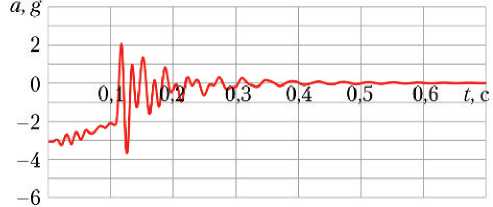
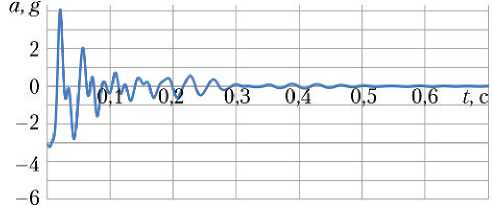
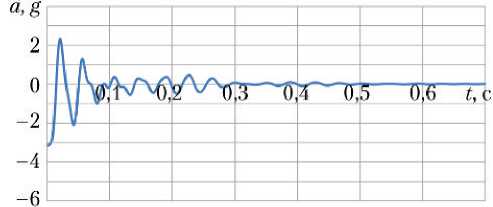
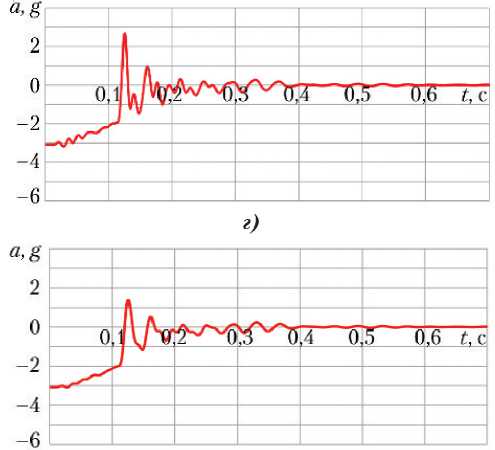
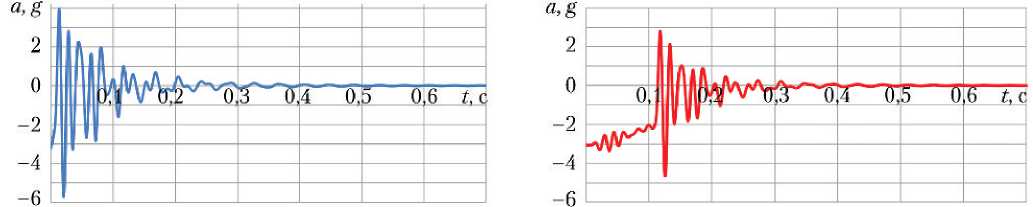
Результаты расчета динамического воздействия на конструкцию ТГК для указанных вариантов показаны на рис. 6 в виде ускорений в различных сечениях ТГК.
динамические характеристики
|
Номер тона |
Собственная частота, Гц |
Погрешность, % |
Значение МАС * |
Характер колебаний |
|
|
Результаты испытаний |
Результаты расчета |
||||
|
1 |
7,90 |
7,84 |
–0,76 |
0,98 |
Первый изгибный тон |
|
2 |
8,24 |
8,15 |
–1,09 |
0,97 |
|
|
3 |
24,71 |
24,73 |
0,08 |
0,90 |
Второй изгибный тон |
|
4 |
25,36 |
25,45 |
0,35 |
0,91 |
|
|
5 |
30,45 |
28,01 |
–8,01 |
0,95 |
Первый продольный тон |
|
6 |
31,28 |
31,44 |
0,51 |
0,98 |
Первый крутильный тон |
|
7 |
35,75 |
35,35 |
–1,12 |
0,95 |
Продольный тон базового блока (не заправленного) |
Примечание. * — MAC ( Modal Assurance Criterion ) — критерий модальной достоверности.
а) б)
д) е)
ж)
з)
Рис. 6. Ускорение в сечениях транспортного грузового корабля: ■ — вариант 1; ■ — вариант 2; а, б — стык агрегатного отсека с переходным отсеком РН; в, г — грузовой отсек; д, е — отсек компонентов дозаправки; ж, з — стык верхнего и нижнего приборных отсеков
отклик элементов конструкции на динамическое воздействие
Все дальнейшие расчетные исследования выполнены с использованием программного комплекса ANSYS [10, 11]. Для определения реакции конструкции ТГК на воздействия решена задача, приведенная на рис. 7. Решение проводится как для нестационарного процесса [12, 13].
Набор осцилляторов имеет характеристики (масса и жесткость), подобранные таким образом, чтобы их собственные частоты перекрывали исследуемый диапазон (10…150 Гц). Расчет отклика проводится
a ( t ) — реализуемое ускорение.
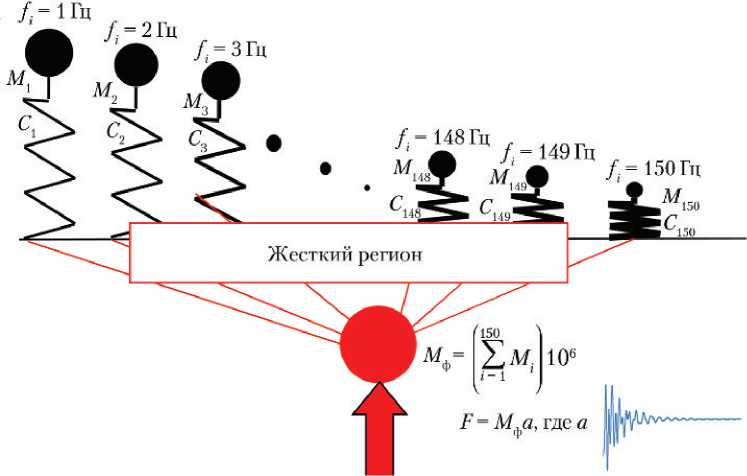
Рис. 7. Схема постановки задачи: Мi — масса осциллятора; Сi — жесткость; fi — частота; Мф — фиктивная масса; F — усилие воздействия
При этом погрешность реализации заданного ускорения на интерфейсе с осцилляторами будет соответствовать отношению массы рассчитываемой модели и фиктивной массы.
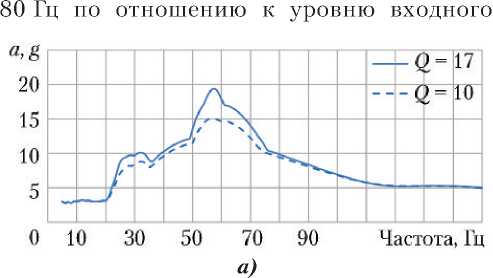
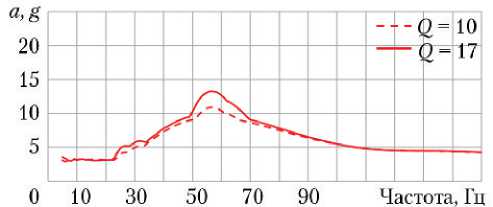
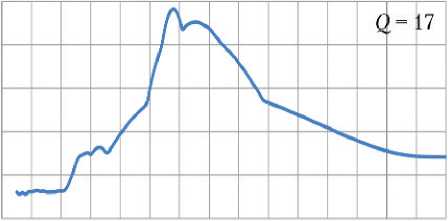
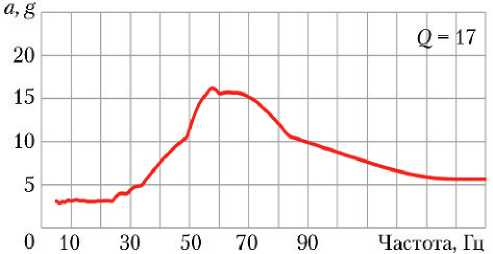
Результаты решения задачи, в виде зависимости максимальных ускорений от собственной частоты осциллятора (элемента конструкции) для представленных выше воздействий в сечениях стыка с РН и приборного отсека при различных циклограммах выключения двигателя, показаны на рис. 8. С целью анализа влияния демпфирования расчет отклика на динамическое воздействие по стыку с РН проведен для различных значений относительного демпфирования 5 и 3%, соответствующих добротностям Q = 10 и Q = 17.
Анализ полученных результатов показывает, что при приложении к конструкции отсека нестационарного кине- в рамках анализа переходных процессов (transient analysis) с применением метода больших масс [14]. Суть метода заключается в том, что к свободному концу пружин с помощью технологии «жесткого региона» [15] прикрепляется большая (на 5–6 порядков больше массы рассчитываемой модели) фиктивная масса, к которой в процессе решения прикладывается переменная по времени сила
F ( t )= М ф a ( t ), 150
где М ф
∑ M i = 1 i
10 6 — фиктивная масса;
матического воздействия, вызванного отключением двигателя:
-
• для элементов с собственной частотой менее 20 Гц амплитудное значение отклика не превышает значения статической составляющей входного сигнала;
-
• для элементов с собственной частотой выше 110…120 Гц отклик повторяет входное воздействие;
-
• максимальное усиление возникает на элементах, имеющих в направлении возбуждения первую собственную частоту в диапазоне 55…70 Гц;
-
• максимальное усиление при реализации циклограммы по варианту 2 («с опережением») примерно в полтора раза меньше, чем при реализации циклограммы по варианту 1;
-
• наблюдается слабая зависимость уровня отклика от величины демпфирования (добротности), так при изменении параметра
демпфирования на 70% изменение отклика происходит примерно на 20%;
• на оборудовании, первая собственная частота которого меньше 40 или больше
воздействия, отклик не превышает двукратного уровня для элементов, расположенных вблизи стыка с РН (АО), и трехкратного уровня для элементов в зоне приборных отсеков.
б)
О 10 30 50 70 90 Частота, Гц
в)
г)
Рис. 8. Отклик (максимальное ускорение) для двух вариантов спада тяги в зависимости от собственной частоты осциллятора для воздействий в сечениях: ■ — вариант 1; ■ — вариант 2; а, б — стык агрегатного отсека с переходным отсеком РН; в, г — стык верхнего и нижнего приборных отсеков
реакция на отсечку двигателя различных типов навесного оборудования
Для подтверждения и конкретизации полученных результатов ниже рассмотрены следующие характерные элементы конструкции:
-
• ББ КДУ — наиболее массивный элемент конструкции;
-
• блок питания — массивный изолированный элемент внутри АО;
-
• установка приборов (АФАР – БУФ) — «двухъярусный» элемент;
-
• рама НПО с приборным оборудованием;
-
• трубопроводы.
Модели для решения этих задач представляют собой подробно воспроизведенные фрагменты корпуса, элементы крепления НО и модель собственно НО. В качестве входного воздействия для каждого фрагмента на этом этапе использованы ускорения в соответствующем сечении ТГК, определенные на основе модели связки РН + ТГК.
Для каждого из указанных фрагментов расчет отклика проводится как анализ переходного процесса с применением метода больших масс.
Базовый блок КДУ. Заправленный ББ с массой М ≈ 1 000 кг, расположенный в АО, имеет парциальную частоту подвески ~18 Гц. На рис. 9 показаны ускорения на ББ, полученные из решения на основе модели второго уровня.
Из графиков видно, что для ББ усиления отклика на рассматриваемое воздействие не происходит, что соответствует ранее полученным (рис. 8) для парциальной частоты ~18 Гц результатам.
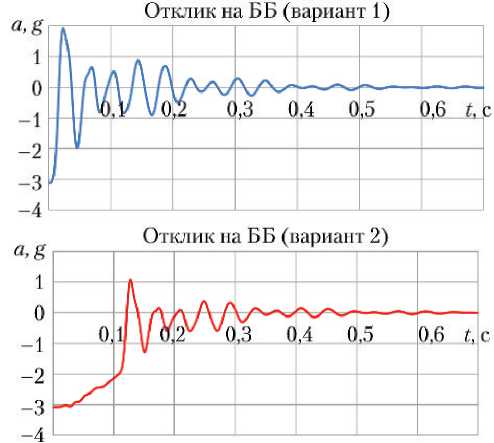
Рис. 9. Ускорение на базовом блоке
Уровень перегрузок (амплитуда знакопеременных ускорений) в обоих вариантах отключения двигателя меньше начального уровня квазистатического нагружения. Таким образом, для ББ и элементов его крепления отключение двигателя третьей ступени не является расчетным случаем и не представляет интереса с точки зрения нагружения, НДС, прочности.
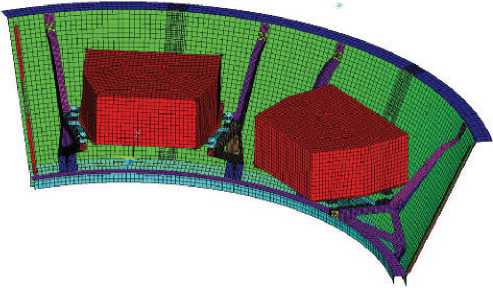
Блок питания. Блок питания 906 В имеет массу ~70 кг. Он закреплен с помощью двух кронштейнов на корпусе нижней части АО в непосредственной близости от стыка с РН.
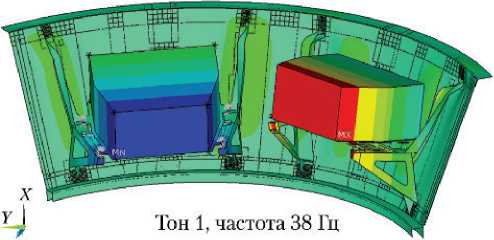
Входным воздействием для этого сечения является ускорение, показанное на рис. 6, а . Разработанная для определения отклика блока питания 906 В модель, включающая в себя фрагмент корпуса АО с силовыми элементами, кронштейны крепления блока, собственно блок питания, показана на рис. 10. Для учета взаимного влияния двух близко расположенных блоков в КЭМ включены оба блока с соответствующей зоной корпуса.
Первые формы собственных колебаний блока с элементами крепления, имеющие наибольшие эффективные массы в направлении возбуждения, также показаны на рис. 10. Первые из них имеют частоты (~40 Гц) значительно ниже, а последующие (~80…100 Гц) — выше диапазона частот, в котором происходит существенное усиление отклика при рассматриваемом воздействии.
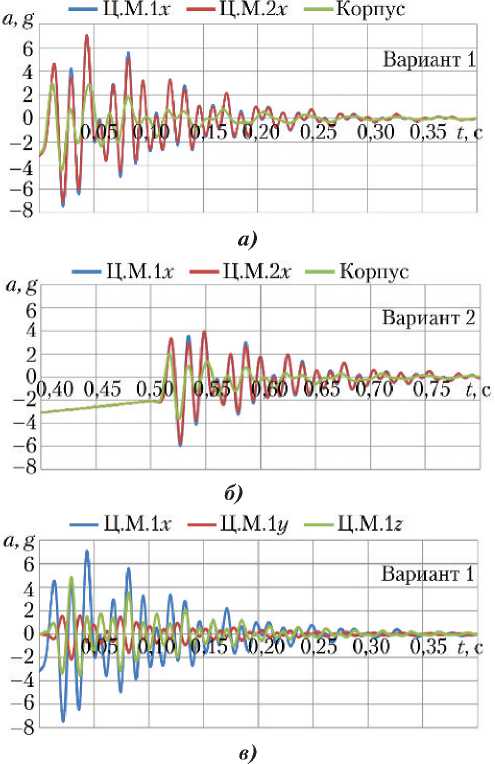
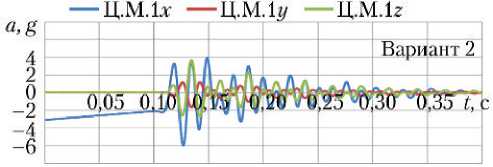
Отклики на входное воздействие, полученные в центре масс блоков питания 906 В, показаны на рис. 11.
Близкие значения собственных частот колебаний по осям X и Z приводят к появлению близких максимальных откликов по величинам ускорений по этим осям (рис. 11, а–г ). При этом величина суммарного ускорения на блоке (рис. 11, д, е ) увеличивается незначительно и не превышает 8,5 g для отключения по варианту 1 и 6,5 g — по варианту 2, что в обоих случаях соответствует коэффициенту усиления К у ≈ 1,5.
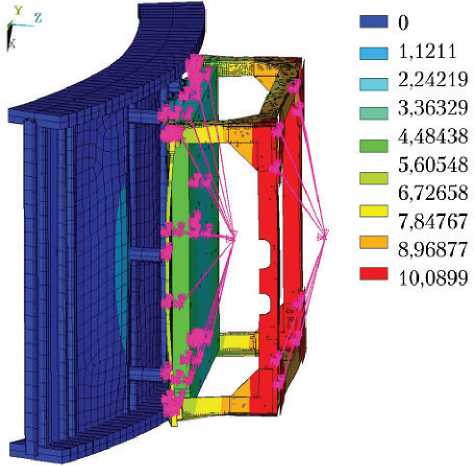
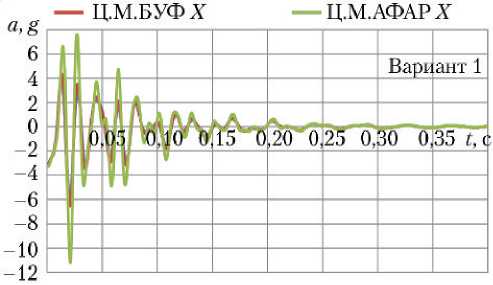
АФАР и БУФ. Приборы БУФ ( М = 12 кг) и АФАР ( М = 5 кг) закреплены снаружи на корпусе приборного отсека (ПО) друг над другом на едином основании (рис. 12, а ).
Для анализа ускорений, реализуемых при отключении двигателя в центрах приборов АФАР и БУФ, построена КЭМ (рис. 12, б ). Первая частота собственных колебаний для системы составляет ~73 Гц, частота колебаний в направлении оси возбуждения составляет ~105 Гц (рис. 12, в , г ).
Расчет отклика конструкции проведен на динамическое воздействие, соответствующее зоне установки приборов (рис. 6, ж, з ). Отклики на входное воздействие, полученные в центрах масс антенны АФАР и БУФ, представлены на рис. 12, д , е .
Одиночные (пиковые) значения ускорения в направлении возбуждения достигают 11 g для элемента «второго яруса», в данном случае АФАР, и не превышают 8 g для элемента, закрепленного на «нижнем» уровне. Несмотря на наличие двухуровневой конструкции крепления прибора АФАР, полученные на нем значения максимальных ускорений также подтверждают результаты, ранее представленные на рис. 8 для осцилляторов с соответствующей (105 Гц) собственной частотой.
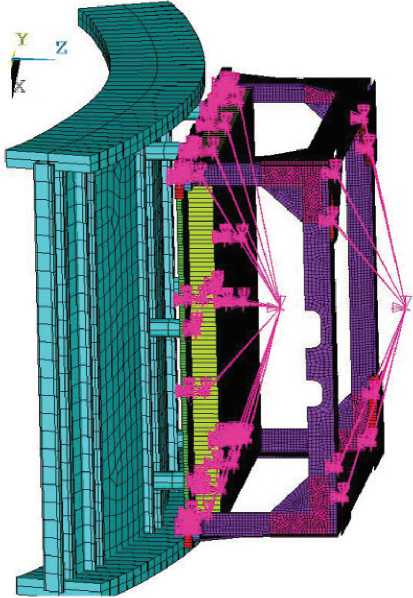
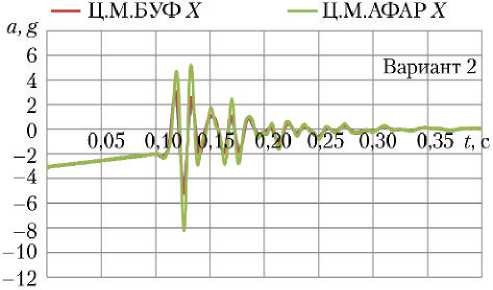
Приборное оборудование НПО. Принципы конструктивного исполнения нижнего и верхнего приборных отсеков ТГК «Прогресс» и элементов крепления НО в них одинаковы. Более высокий уровень воздействия в сечении НПО, по сравнению с ВПО, а также его практически полное соответствие приборному отсеку пилотируемого транспортного корабля «Союз» определили выбор в пользу этого отсека для приведения подробных материалов по анализу НДС и прочности.
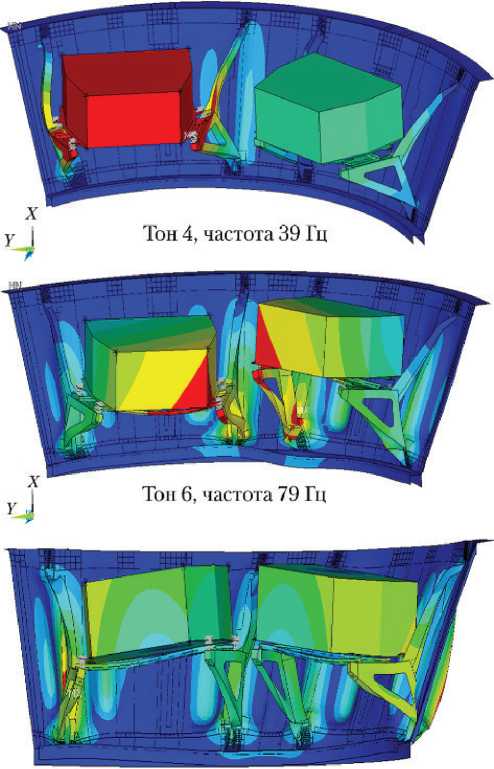
КЭМ приборной рамы с приборным оборудованием НПО показана на рис. 13, а . КЭМ содержит силовую конструкцию — приборную раму с фитингами (бобышками) крепления приборов, дополнительные рамки, на которых закреплены отдельные приборы. Корпуса приборов моделируются оболочечными элементами с дополнительными точечными массовыми элементами, расположенными в центре масс приборов и жестко связанными с основанием соответствующего прибора для имитации полной массы приборов.
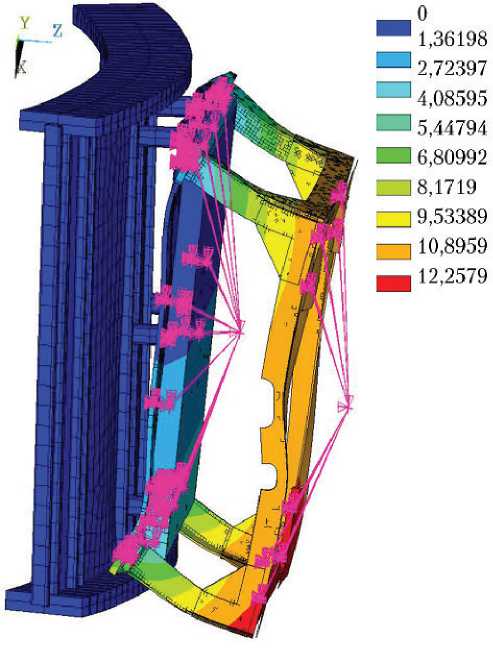
Формы колебаний с максимальными эффективными массами (в направлении возбуждения) также представлены на рис. 13. Среди них колебания наиболее массивных (М ≈ 50 кг) амортизированных приборов в частотном диапазоне 25…30 Гц (рис. 13, б, в ). Для более высоких частот максимальная эффективная масса получена для колебаний прибора П1 с частотой 61 Гц. Соответствующая форма колебаний показана на рис. 13, г .
Результаты расчета отклика в центрах масс приборов, сгруппированных в зависимости от массы, представлены на рис. 14. Полученные результаты показывают, что уровень отклика увеличивается с уменьшением массы приборов.
а)
У jA Ton 7, частота 100 Гц
б)
Рис. 10. Блок питания 906 В: а — конечно-элементная модель блока; б — формы собственных колебаний блока с максимальными эффективными массами
г)
д)
е)
Рис. 11. Ускорения на блоке питания 906 В: а, б — ускорения по оси Х в центре масс блоков питания; в, г — ускорения по осям изделия на блоке питания; д, е — суммарные ускорения на блоке питания
а)
г)
б)
д)
в)
е)
Рис. 12. Установка приборов и результаты расчетов: а — общий вид установки приборов (1 — термоплата; 2 — кронштейн; 3 — антенна АФАР; 4 — прибор БУФ; 5 — плита); б — конечно-элементная модель; в — первый тон, частота 73 Гц; г — второй тон, частота 105 Гц; д, е — отклики в центрах масс антенны АФАР и прибора БУФ для вариантов изменения тяги 1 и 2
б)
а)
в)
г)
Рис. 13. Нижний приборный отсек: а — конечно-элементная модель; б, в, г — формы колебания с максимальными эффективными массами
Соотношение максимальных перегрузок, возникающих на приборах приборного отсека в двух вариантах отсечки тяги при отключении двигателя подтверждает результат, полученный ранее (см. рис. 8). Для наиболее массивных приборов с массами M ≈ 40…50 кг возникающие при отключения двигателя максимальные ускорения не превышают 9 g для варианта 1 и 5,5 g — для варианта 2, что соответствует коэффициентам усиления по отношению к уровням входного воздействия ~1,65 и ~1,2.
Следует отметить, что наиболее тяжелые из рассмотренных приборов крепятся на приборную раму через амортизаторы, обеспечивающие первую собственную частоту колебаний прибора на уровне не выше 30 Гц и снижение максимального уровня перегрузки примерно в два раза.
На более легких (и неамортизированных) элементах навесного оборудования массой 10–15 кг реализуется 3–4 пика амплитудой 15–20 g , на приборах массой 3–5 кг при том же характере отклика (3–4 пика уровня, близкого к максимальному) величина максимальной перегрузки может однократно достигать 25–35 g .
Уровень отклика навесного оборудования на динамическое воздействие при отключении двигателя по варианту 2 примерно в полтора раза ниже, чем в варианте 1.
Трубопроводы. Многочисленные трубопроводы систем транспортного грузового корабля имеют разную конфигурацию, длину, диаметр, конструктивное исполнение опор и, как следствие, разные собственные частоты первого тона колебаний, укладывающиеся в диапазон 35…90 Гц.
|
Вариант 1 |
Вариант 2 |
||
|
о LO 1 О ^ U |
— AY 41805 —AY 52000—AY 45243 a,g 20
° wWWW^ -10 -20
|
— AY41805 a.g 20 10 I -10 ----- - 20 -30 |
—AY 52000 — AY_45243 МЬМУ^^*м |
|
у Ю U § |
— AY36439 —AY 56334 — AY_46298 — AY 42980 —AY 34633 a.g\ -fc=== == 0 wlMd^ ■ ■ ид t, c 20___: -30 |
— AY36439 — AY 42980 a,g 20 -20 -30 |
— AY_56334 — AY 46298 — AY 34633 11^6^ D 4--^5---0,6 t,c |
|
о U |
—AY_48183 — AY_32696 —AY_60038—AY_62181 —AY_62182 — AY_53061 — AY_38184 20 0 ^mM ^^^^T^"'" 1)4" (),5‘ __0, 6 /, c -2° ----- ----- 30 |
— AY_48183 — AY — AY 62182 — AY a, g 20 ^ЯН -20 -30 |
_32696 — AY_60038 —AY_62181 _53061 —AY_38184 ^mL '~ 0^4" 015 O O-fj-e- |
|
у Ю U § |
—AY 49120 — AY47205 — AY_31455 — AY_53983 20 t0 0^3 04 ---05---06 t,c -30 |
—AY_49120 — AY a,g _ ^A1 -20 _____ J -30 |
47205 — AY_31455 — AY_53983 Й"№---M-- Gt5-- 0,6 t,c |
|
у со U § |
—AY_71583 — AY64169 —AY_64170—AY_58518 —AY65606 — AY65607 —AY_64643
20 fl 1 10
|
—AY 71583 — AY —AY 65606 — AY ". g 20 :';lfc 30 |
64169 — AY 64170— AY_58518 65607 — AY 64643 ^6^" 0,4 0,5 0,6 t,c |
Рис. 14. Продольные ускорения на элементах приборного оборудования нижнего приборного отсека Примечание. AY — номера расчетных узлов.
Прямые расчеты показывают, что реакция трубопроводов на рассматриваемые воздействия качественно соответствует графикам рис. 8 с максимальным откликом на трубопроводах с собственной частотой ~55 Гц. При этом максимальная перегрузка имеет место в середине пролета длинных прямолинейных трубопроводов, достигая значения 25 единиц.
Напряженно-деформированное состояние элементов крепления навесного оборудования
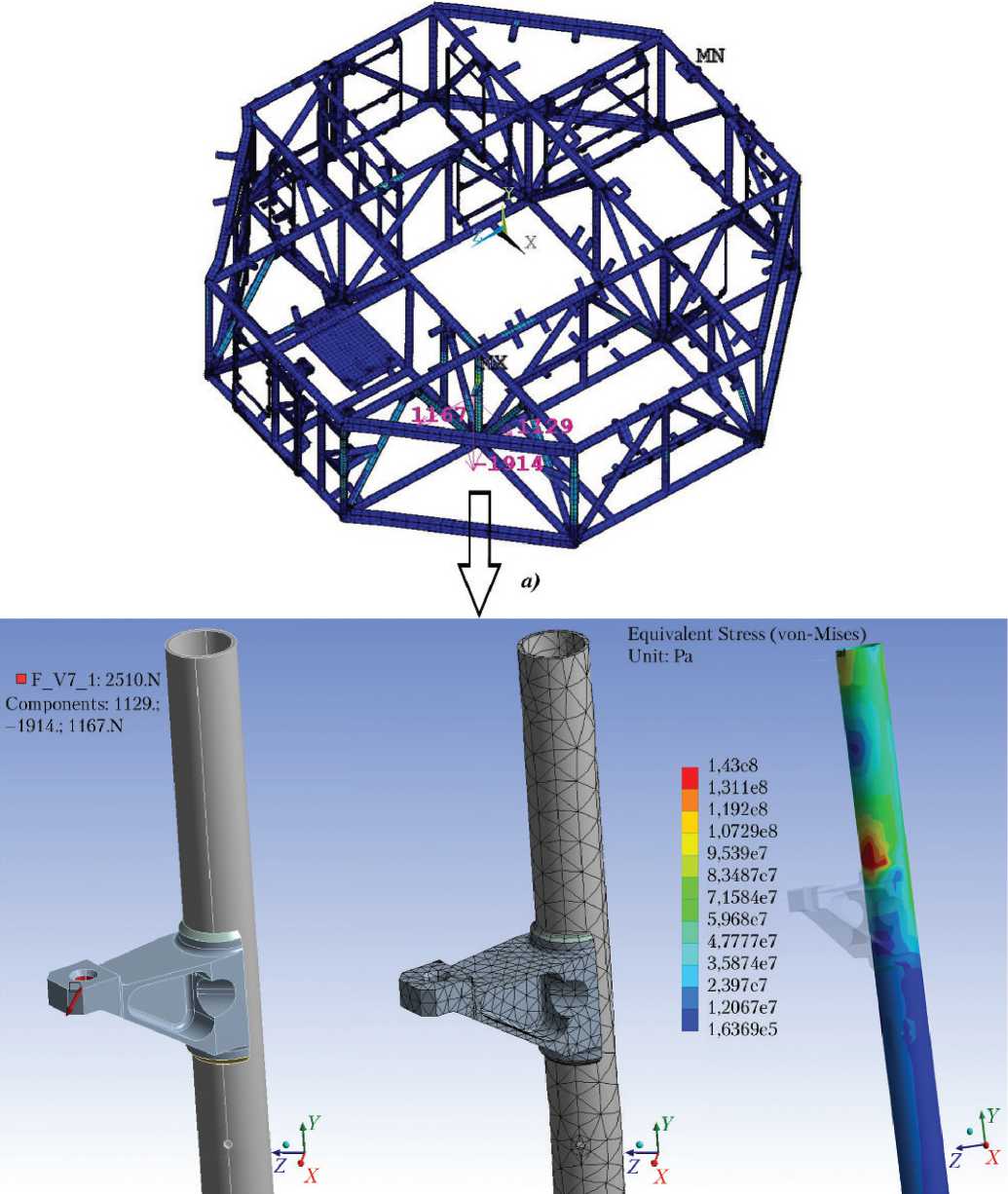
Определение уровня напряжений в конструкциях ТГК проведено методом прямого интегрирования [15] для всего времени действия входного сигнала. Проведенный анализ показывает, что зоны с заметным уровнем напряжений в любой момент времени носят локальный характер, при этом наиболее нагруженными при рассматриваемом воздействии являются элементы НО, находящиеся в приборных отсеках ТГК. Максимальные ускорения имеют место для профиля спада тяги по варианту 1 на приборе П1 (см. рис. 13, а ), расчетный узел 46298. Частота собственных колебаний прибора составляет ~61 Гц, что близко к середине частотного диапазона, в котором наиболее интенсивна реакция на рассматриваемое воздействие.
Распределение эквивалентных напряжений по элементам приборного отсека для момента времени реализации максимальных напряжений (~0,075 с от начала процесса отсечки тяги) показаны на рис. 15, а . Там же приведены максимальные усилия, приходящие с прибора П1 на элемент крепления. Максимальные напряжения реализуются в стойке приборной рамы в зоне кронштейна крепления прибора. Для более точного определения НДС использована КЭМ с подробным представлением элементов конструкции зоны максимальных напряжений. Эта модель с результатами расчета НДС от полученных нагрузок показана на рис. 15, б .
Таким образом, при спаде тяги по варианту 1 максимальные эквивалентные напряжения возникают в стойке приборной рамы и составляют ~145 МПа (при σ b = 320 МПа).
прочность элементов крепления навесного оборудования
Изложенные выше результаты дают полную картину динамического поведения конструкций ТГК как реакции на импульсное воздействие при отсечке двигателя третьей ступени РН. Пошаговое рассмотрение воздействия в совокупности с определением реакции конструкции на основе КЭМ разного уровня позволили локализовать проблему прочности конструкций ТГК, сведя ее до малой зоны конкретных деталей внутри НПО, показанной на рис. 15. Максимальное напряжение в случае отсечки по варианту 1 в конструкции приборной рамы не превосходят 145 МПа.
Как показывает практический опыт, предельное состояние конструкции при пиковых динамических воздействиях возникает вследствие грубых ошибок расчетов и конструирования и в большинстве случаев — для консольных масс с недостаточными базовыми размерами основания. Характерные примеры таких ошибок, выявленных при испытаниях, приведены в статьях [16, 17]: максимальные напряжения, превосходящие предел прочности, формируются в зонах, достаточных для разрушения.
В рассматриваемом случае уровень пиковых напряжений достигает максимума в точке, составляет менее половины от предела прочности, т. е. конструкция далека от предельного состояния. По формальному признаку — отношению предела прочности к условным упругим напряжениям — запас составляет более двух. Фактическое предельное состояние в рассматриваемом случае в связи со специфическими свойствами конструкционного материала АМг6М формируется разрастанием зоны пластического деформирования до образования пластического шарнира.
Но даже в этом случае разрушения не произойдет, а лишь понизится степень статической неопределимости приборной рамы. Кроме того, следует иметь в виду, что реализации этого события будет сопутствовать понижение жесткостных характеристик конструкции с соответствующим уменьшением значений парциальных частот и, как следствие, нагрузок.
Типичным же предельным состоянием при динамическом, как при любом циклическом (переменном) нагружении, является исчерпание несущей способности по критерию усталостной прочности [18, 19]. Поскольку в рассматриваемом случае нагружение носит импульсный характер, количество циклов невелико (исчисляется единицами) и, соответственно, их вклад в общий блок нагружения и накопление повреждаемости незначителен. Ресурс, соответствующий действующим максимальным напряжениям, составляет сотни тысяч циклов.
б)
Рис. 15. Результаты расчета крепления навесного оборудования в нижнем приборном отсеке: а — распределение эквивалентных напряжений в элементах крепления приборного оборудования; б — результаты уточненного расчета в зоне максимальных напряжений
выводы
На основе системы разработанных динамических моделей проведено исследование влияния профиля отсечки тяги последней ступени РН на уровень реакции элементов навесного оборудования и прочность конструкции ТГК.
Технологический цикл расчетных исследований построен в виде поэтапной реализации динамических моделей повышающегося на каждом этапе уровня.
Список литературы Нагружение и прочность конструкций транспортного космического корабля при воздействии отсечки тяги двигателя третьей ступени ракеты-носителя
- Колесников К.С. Динамика ракет. М.: Машиностроение, 2003. 520 с.
- Гладкий В.Ф. Динамика конструкции летательного аппарата. М.: Наука, 1969. 495 с.
- Безмозгий И.М., Софинский А.Н., Чернягин А.Г. Моделирование в задачах вибропрочности конструкций ракетнокосмической техники//Космическая техника и технологии. 2014. № 3(6). С. 71-80.
- Зенкевич О. Метод конечных элементов в технике. М.: Мир, 1975. 541 с.
- Галлагер Р. Метод конечных элементов. Основы. М.: Мир, 1984. 431 с.
- Афанасьев И. Универсальная верхняя ступень//Новости космонавтики. 2006. № 4(279). С. 28.
- Машиностроение. Энциклопедия. Т. IV -22. Ракетно-космическая техника, кн. 2, ч. I. М.: Машиностроение, 2014. С. 53-64.
- Lahey R.S., Miller M.R., Reymond M.A. (eds.) MSC/NASTRAN Reference Manual, Version 68, The MacNeal-Schwendler Corporation, Los Angeles, California, 1994.
- Blakely K.D. MSC/NASTRAN Basic Dynamic Analysis User’s Guide, Version 68, The MacNeal-Schwendler Corporation, Los Angeles, California, 1993.
- Theory Reference for the Mechanical ADPL and Mechanical Applications. ANSYS Release 14.0, SAS IP, Inc. 2011.
- Чигарев А.В., Кравчук А.С., Смалюк А.Ф. ANSYS для инженеров. М.: Машиностроение, 2004. 510 с.
- Редин Д.Г., Лалин В.В. Решение нестационарных динамических задач методом конечных элементов по времени//Известия высших учебных заведений. Строительство. 2009. № 1. С. 31-38.
- Hughes T.J.R. Analysis of transient algorithms with particular reference to stability behavior. Computation methods for transient analysis. Vol. 1. Ed. T. Belytschko and K.J. Bathe. North-Holland, Amsterdam. 1983. P. 67-155.
- ANSYS Mechanical APDL Theory Reference. Release 16.1.
- ANSYS. Руководство пользователя. Release 16.1. SAS IP, Inc.
- Безмозгий И.М., Казакова О.И., Софинский А.Н., Чернягин А.Г. Отработка вибропрочности автоматического космического аппарата дистанционного зондирования Земли//Космическая техника и технологии. 2014. № 4(7). С. 31-41.
- Безмозгий И.М., Софинский А.Н., Чернягин А.Г. Отработка вибропрочности узлового модуля Российского сегмента Международной космической станции//Космическая техника и технологии. 2015. № 3(10). С. 15-25.
- Софинский А.Н. Влияние искажения формы конструкции на ее несущую способность//Космическая техника и технологии. 2016. № 2(13). С. 34-44.
- Безмозгий И.М., Софинский А.Н., Чернягин А.Г. Напряженно-деформированное состояние и прочность сварной оболочки с тоннельной трубой//Космическая техника и технологии. 2016. № 3(14). С. 43-55.
