Наземные и воздушные агротехнологические агрегаты с бесконтактным электропитанием и управлением

Автор: Башилов А.М., Королев В.А.
Журнал: Вестник аграрной науки Дона @don-agrarian-science
Рубрика: Технологии, машины и оборудование для агропромышленного комплекса
Статья в выпуске: 1 (65), 2024 года.
Бесплатный доступ
В статье описаны возможности и способы управления крупным аграрным бизнес-производством, технологические процессы в котором выполняются на больших территориях. Анализ тенденций развития подобных агрокомплексов свидетельствует о перспективах использования здесь мобильных подвижных агрегатов и систем (МАС) наземного и воздушного базирования, в том числе, беспилотных. Функционирование МАС в условиях агропроизводства имеет ряд особенностей: значительные территории и их удалённость нестабильность условий функционирования: непрерывные трансформации характеристик внешней среды, параметров технологических процессов, состояния самоорганизующегося объекта аграрного производства, связанное с этим возникновение новых задач, коррекция реализуемых операций, траекторий движения объекта и др. Эти особенности вызывают необходимость использования специальных устройств поддержки технологической готовности, эффективного энергообеспечения и обслуживания МАС, адаптивного управления процессами. Затраты и сроки ввода в действие этих служб могут быть существенно уменьшены при использовании расположенной на территориях функционирования МАС инфраструктуры объектов различного назначения: линий централизованного электроснабжения, мобильных операторов связи, центров контроля и управления территориями и т.п. Такой подход в дальнейшем сократит затраты на обслуживание и эксплуатацию МАС, их систем электроснабжения и в общем снизит стоимость реализации агропроцессов. На специально оборудованных площадках также располагают базы дислокации мобильных технологических агрегатов с системами подзарядки аккумуляторов этих агрегатов, а на мачтах и опорах - системы подзарядки агрегатов воздушного функционирования. Исходя из требований экономичности, энергосбережения и автоматизации технологических процессов МАС перспективно применение электрифицированных агрегатов с бесконтактным электроснабжением при перемещении в рабочей зоне. Рассмотрено применение бесконтактной системы электрической зарядки с использованием однопроводниковой резонансной системы передачи электроэнергии.
Агропредприятие, система управления, мобильный агрегат, агрегат наземного базирования, агрегат воздушного базирования, бесконтактное электроснабжение
Короткий адрес: https://sciup.org/140305976
IDR: 140305976 | УДК: 631.17:631.152 | DOI: 10.55618/20756704_2024_17_1_30-38
Ground and air agrotechnological units with contactless power supply and control
The article describes the possibilities and methods of managing large agricultural business production, the technological processes carried out in large areas. An analysis of the trends in the development of such agricultural complexes indicates the prospects for the use of wirelessly connected mobile units and systems (WUS) ground and airborn, including unmanned ones. The functioning of the WUS in the conditions of agricultural production has a number of features: large territories and their remoteness, instability of operating conditions: continuous transformations of the characteristics of the external environment, parameters of technological processes, the state of a self-organizing object of agricultural production, the associated emergence of new tasks, correction of the implemented operations, trajectories of the object's movement, etc. These features necessitate the use of special devices to support technological readiness, efficient power supply and maintenance of the WUS, and adaptive process control. The costs and terms of putting these services into operation can be significantly reduced by using the infrastructure of facilities for various purposes located in the territories where the WUS operate: centralized power supply lines, mobile telecom operators, territorial control and management centers, etc. In the future, this approach will reduce the cost of maintenance and operation of WUS, their power supply systems and generally lower the cost of implementing agricultural processes. Specially equipped platforms are supposedto locate bases for the deployment of wirelessly connected technological units with systems for recharging the batteries of these units, while masts and supports are supposed to have systems for recharging units of air functioning. Based on the requirements of efficiency, energy saving and automation of WUS technological processes, the use of electrified units with contactless power supply when moving in the working area is promising. The application of a contactless electric charging system using a single-conductor resonant power transmission system is considered.
Текст научной статьи Наземные и воздушные агротехнологические агрегаты с бесконтактным электропитанием и управлением
Введение. Интенсификация применений мобильных агрегатов и систем (МАС) наземного и воздушного базирования, в том числе, беспилотных, при решении разнообразных актуальных и рутинных задач – характерный признак развития человеческой цивилизации. Весьма перспективно использование МАС в качестве технологических устройств, средств контроля и управления технологиями точного растениеводства и животноводства [1–9]. В связи с высокими экологическими требованиями и техникоэкономическими характеристиками аграрного производства, аналогичными в других смежных отраслях народного хозяйства, целесообразно применение электрифицированных МАС. Надёжное и эффективное функционирование таких устройств во многом определяют функционал и возможности систем энергоснабжения.
В настоящее время на промышленных предприятиях, электротранспорте и в складском оборудовании для электроснабжения МАС используют автономные источники (электрические генераторы, аккумуляторы) либо системы с постоянной связью объекта и электросети (контактные). В условиях агропроизводства эти способы не всегда доступны. Здесь значительная часть МАС функционирует на больших территориях, в том числе, удалённых и труднопроходимых, не оборудованных необходимой инфраструктурой, в условиях недоступности подзарядных станций и систем электроснабжения, отсутствия дорожной инфраструктуры и т.п. В реальных системах растениеводства и животноводства работу МАС регулярно сопровождают изменения условий функционирования (непостоянство характеристик внешней среды), параметров технологических процессов (трансформации характеристик самоорганизующегося объекта аграрного производства) и связанное с этим возникновение новых задач (коррекция реализуемых операций, траекторий движения объекта или др.) [10–13]. Таким образом, для данных условий применения нужны нетривиальные технические решения. В частности, здесь могут быть эффективны беспилотные наземные и воздушные роботизированные агроагрегаты, бесконтактные системы электроснабжения и зарядки аккумуляторов (БСЭЗ).
В статье рассматривается использование электрифицированных МАС в агротехнологиях. Эти МАС применяются не в качестве основных исполнительных технологических агрегатов базовых технологий (тракторы, комбайны и т.п.), а участвуют в ходе реализации агротехнологий, как энергоэффективные экологически чистые средства оперативного использования.
При применении МАС снижаются либо полностью отсутствуют негативные воздействия на объект аграрного производства, почву и окружающую среду.
Материалы и методы исследований. Функционирование современных крупных агрокомплексов предполагает реализацию технологических процессов на локально распределённых территориях, часто значительной площади и удалённых друг от друга. При этом параллельно и одновременно могут выполняться операции полевого и тепличного растениеводства, пастбищного животноводства, содержания животных на фермах и т.д. В реализациях территориально-распределённых технологий используют широкую номенклатуру техногенного оборудования: исполнительные рабочие машины, устройства и системы контроля процессов (технологические датчики, средства технического зрения, дальномеры, лидары и т.п.), передачи информации, управления, логистическое оборудование и др. Для сокращения единиц применяемого технологического оборудования рационально совместное использование части оборудования для разных технологий и на разных территориях.
Из-за территориальной удалённости и больших размеров обслуживаемых территорий в рассматриваемых условиях при применении МАС возможны сложности и проблемы: обеспечения высокой готовности и технической поддержки оборудования; снабжения различными видами ресурсов; организации пунктов подзарядки аккумуляторов, хранения, оперативного ремонта и восстановления оборудования. Решение этих задач значительно упрощается при расположении на территориях функционирования МАС инфраструктуры объектов различного назначения: линий связи , электроснабжения, центров контроля и управления территориями и т.п. Использование элементов инфраструктуры этих объектов позволяет существенно сократить затраты на монтаж, обслуживание и эксплуатацию систем электроснабжения МАС, поддержку технологической готовности оборудования и в будущем снизит стоимость реализации агропроцессов.
Электроснабжение с использованием бесконтактных систем – инновационное направление развития электротранспорта. Основные технические решения направлены на применение систем электроснабжения в бесконтактном исполнении («бесконтактный троллей»), дистанционной подзарядки аккумуляторов, электроснабжение объекта в движении. Работы по созданию подобных систем, основанных на разных принципах, выполняются в США, Южной Корее, Германии, Израиле, Российской Федерации [ ].
Согласно существующей классификации, разработки технологий БСЭЗ идут по следующим направлениям:
-
- использование энергии электромагнитного излучения радиочастотного или микроволнового диапазона (по соображениям безопасности способ применяют исключительно для маломощных устройств);
-
- использование энергии магнитного поля, генерируемого катушкой-излучателем и улавливаемого катушкой-приёмником (поскольку затухание магнитного поля гораздо сильнее, чем электрического, способ применим для зарядки на малом расстоянии. Способ безопасен, может быть применён для устройств любой мощности);
-
- использование однопроводниковой резонансной системы (ОРС), обеспечивающей передачу электроэнергии по одному проводу (токопроводящему каналу в различных средах). Наиболее полно информация об ОРС изложена в [14–15].
Из перечисленных БСЭЗ по технологической и технико-экономической эффективности для рассматриваемых условий эксплуатации и обслуживания наиболее перспективна последняя. Резонансные системы характеризуют чрезвычайно малые потери энергии в передающей линии (отсутствие токов проводимости), некри-тичность к её материалу, независимость сечения передающей линии от мощности электроснабжения, отсутствие режимов КЗ, высокая надёжность функционирования, низкие затраты при монтаже и эксплуатации [14].
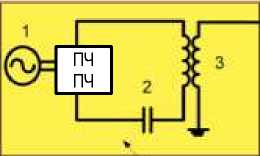
Структура ОРС обеспечивает преобразование параметров первичного источника энергии (амплитуда и частота напряжения) и работу цепей трансформаторов в резонансном режиме. Энергия первичного источника (централизованная сеть электроснабжения, электромашинный генератор или др.) через высокочастотный преобразователь частоты (ПЧ) поступает во входной резонансный контур (первичная обмотка повышающего трансформатора L1 – конденсатор C1), настроенный на частоту f0 (0,5 кГц < f0 < 500 кГц.). Далее через однопроводниковую линию, выходной резонансный контур (вторичная обмотка понижающего трансформатора – конденсатор) и преобразователь частоты электроэнергия попадает на нагрузку. Передачу электрической энергии на нагрузку осуществляют по электрической цепи, включающей высоковольтную обмотку повышающего трансформатора, однопроводниковую линию длиной LAB, высоковольтную и низковольтную обмотку понижающего трансформатора в резонансном режиме. Входной резонансный контур и его повышающий трансформатор преобразуют электрическую энергию генератора по напряжению до 10– 1000 кВ, выходной контур и его понижающий трансформатор и преобразователь частоты выполняют преобразование энергии согласно требованиям нагрузки. В резонансной системе электроснабжения при передаче электроэнергии в однопроводниковой линии электропередачи образуются стоячие волны электромагнитного поля. Векторы напряжённостей электрического и магнитного полей ортогональны, их ампли- туды определяет, главным образом, мощность источника электроснабжения. Значения магнитной напряжённости вдоль однопроводниковой линии электропередачи изменяются по гармоническому закону. Передача электроэнергии наиболее эффективно осуществляется в «пучностях» стоячих волн электромагнитного поля. Длина электрической цепи LAB связана с длиной волны λ и частотой f0 резонансных колебаний, на которых передаётся энергия, соотношения-
^ п
----, где n - натуральное
2^ ЛВ
ми: * = V' f n =
число; c n – скорость света [14].
Результаты исследования и их обсуждение. Обеспечение функционирования МАС. Эффективность реализации территориально-распределённых агротехнологий в существенной мере определяют технические средства контроля процессов (технологические датчики, системы технического зрения, дальномеры, лидары и т.п.) и устройства передачи информации. Данное оборудование располагают стационарно (на специальных площадках, мачтах, опорах и др.) либо на подвижных технологических агрегатах. При расположении на тер- риториях функционирования МАС объектов различного назначения (линий связи, электроснабжения, центров контроля и управления территориями и т.п.) рационально размещать средства контроля процессов и коммуникационные устройства на элементах инфраструктуры таких объектов технологической готовности оборудования и в будущем снизит стоимость реализации агропроцессов.
Кроме этого, необходимы базы дислокации МАС, на которых располагают оборудование поддержки технологической готовности МАС (обслуживание, ремонт, хранение), БСЭЗ, склад съёмных рабочих органов и др. Устройства подзарядки аккумуляторов размещают: для наземных мобильных технологических агрегатов на территории функционирования МАС – стационарно на базах дислокации и на специализированных автономных подвижных агрегатах; для мобильных агрегатов воздушного функционирования – на мачтах и опорах, в том числе на элементах инфраструктуры сторонних объектов неагротехнологического назначения (рисунок 1).
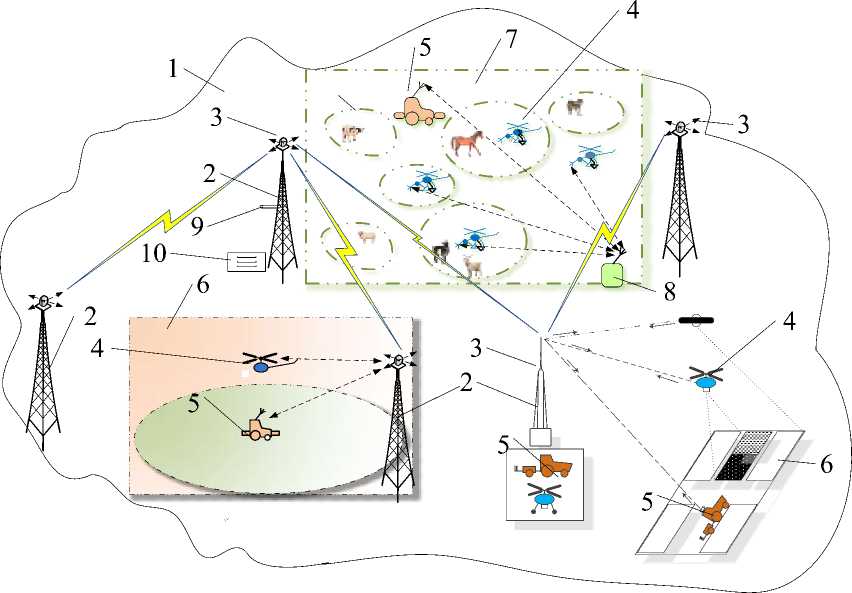
1 – территория функционирования МАС; 2 – мачты ЛЭП, связи и т.п.; 3 – блок передачи информации; 4 – беспилотный летающий аппарат; 5 – наземный агрегат; 6 – зона полеводства; 7 – зона животноводства; 8 – блок управления;
9 – база подзарядки беспилотного летающего аппарата, 10 – база дислокации и обслуживания МАС Рисунок 1 – Инфраструктура различного назначения в обеспечении функционирования МАС
1 – territory of the WUS operation; 2 – power transmission line masts, communication masts, etc.; 3 – information transmission unit; 4 – unmanned aerial vehicle; 5 – ground unit; 6 – field cultivation zone; 7 – livestock breeding zone; 8 – block control;
9 – recharging base of unmanned aerial vehicle; 10 – deployment and maintenance base of the WUS Figure 1 – Infrastructure for various purposes in ensuring the functioning of the WUS
Реализация мероприятий по монтажу оборудования обеспечения агротехнологиче-ских процессов на элементах инфраструктуры сторонних объектов сократит затраты на монтаж, обслуживание и эксплуатацию МАС, а также стоимость конечной продукции.
При функционировании МАС средства контроля процессов, размещённые стационарно, в режиме реального времени непрерывно контролируют обслуживаемую территорию на предмет соответствия параметров технологических процессов регламенту и исключения нештатных ситуаций. Выявленные стационарными устройствами отклонения параметров технологических процессов, деградирующие объекты (заражённые заболеваниями, вредителями и др.), участки территории усиленного наблюдения для предупреждения чрезвычайных ситуаций, депрессивные зоны развития сельскохозяйственных культур на сельхозугодиях фиксируют, определяют их координаты. При необходимости оперативного реагирования на возникшие ситуации на соответствующие участки перемещают мобильные подвижные (пилотируемые либо беспилотные) агрегаты наземного, либо воздушного функционирования. С помощью этих агрегатов уточняют имеющуюся информацию, осуществляя усиленное наблюдение за участками и объектами на территории. Кроме этого, мобильные агрегаты способны оперативно выполнять локальные технологические воздействия на объект наблюдения.
Полученная от средств контроля процессов информация подвергается анализу на соответствие регламенту технологических карт. После сопоставления реальной информации с ретроспективными данными осуществляют формирование и, в дальнейшем, коррекцию динамической модели реализуемых технологий. Динамическая модель обеспечивает предсказание изменений параметров технологического процесса, характеристик объекта аграрного производства, окружающей среды. Использование этих данных позволяет обеспечить выполнение технологических операций в оптимальные сроки с оптимальными параметрами и, при необходимости, корректировать нужным образом харак- теристики реализуемых технологических воздействий на объект аграрного производства.
Описанные действия реализуются многоуровневой системой управления. В общем случае, с определёнными дополнениями могут использоваться традиционные алгоритмы функционирования и взаимодействия объектов агропроизводства. Однако в условиях крупных сельхозпредприятий рационально применять более функциональные системы, например, сетецентрические. Горизонтальные и вертикальные связи таких систем, наряду с относительной самостоятельностью уровней управления предприятием, обеспечивают получение наилучших результатов. В настоящее время при принятии решений на нижних уровнях системы управления перспективны интеллектуальные устройства с элементами самонаведения и самоорганизации беспилотных технологических агрегатов. По мере создания нейросетевых обучающих баз возможно применять интеллектуальные, в том числе, предиктивные устройства в структурах более высоких уровней управления.
Бесконтактное электроснабжение МАС. При бесконтактном электроснабжении мобильных средств посредством взаимодействия электромагнитных полей передающей и приёмных обмоток магнитно-индукционной структуры ОРС передачу электроэнергии осуществляют через воздушный промежуток между однопроводниковой линией электроснабжения, проложенной в грунте или дорожном покрытии, и токосъёмным устройством на днище подвижного технологического средства (рисунок 2). Электроэнергия поступает на токосъёмное устройство от системы элементов однопроводниковой линии электропередачи, проложенных непосредственно близко к поверхности грунта (дорожного покрытия). При работе системы в элементах однопроводниковой линии электропередачи образуются стоячие волны электромагнитного поля. Частота и фаза колебаний всех участков стоячей волны одинакова, а амплитуда этих колебаний меняется во времени и вдоль однопроводникового кабеля линии электропередачи от нуля ("узлы") до максимального значения ("пучности") [14].

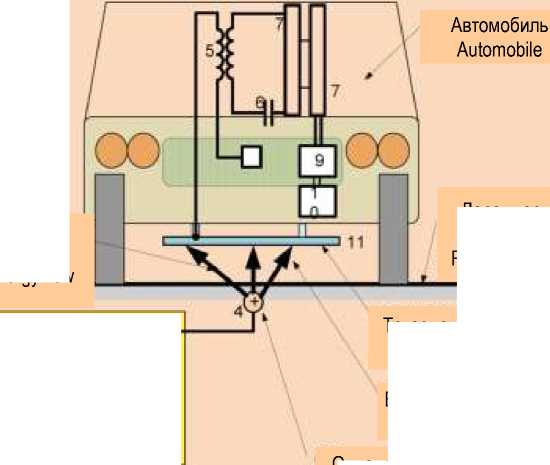
Токосъемное устройство Current-collecting device
Дорожное покрытие Road surface
Однопроводниковая линия Single-wire line
Воздушный промежуток Air gap
Источник электроснабжения Power supply
Поток энергии Energy flow
-
1 – первичный источник электроэнергии высокой частоты; 2 – резонансный конденсатор;
-
3 – высоковольтный трансформатор; 4 – система элементов однопроводниковой линии электропередачи (1- n ); ПЧ – преобразователь частоты
Рисунок 2 – Бесконтактное электроснабжение объектов с использованием ОРС
-
1 – primary source of high frequency electricity; 2 – resonant capacitor; 3 – high-voltage transformer;
-
4 – system of elements of a single-conductor power transmission line (1- n ); FC – frequency converter Figure 2 – Contactless power supply of objects using single-wire resonant system
При монтаже однопроводниковой линии ОРС в дорожном покрытии или почве возможно формирование расположения вектора магнитной индукции электромагнитного поля: вертикально, горизонтально вдоль или поперёк направлению движения МАС. Это достигается расположением элементов в почве или дорожном покрытии, а также выбором их размера (половина длины волны резонансной частоты, на которой выполняется передача электроэнергии). Например, при размещении элементов однопроводниковой линии электропередачи перпендикулярно направлению движения транспортного средства, их длину задать, равную половине волны резонансной частоты; вектор магнитной индукции электромагнитного поля располагается горизонтально относительно дорожного покрытия и параллельно направлению движения транспортного средства и т.д. (патент № 2505427 С2). В ряде конкретных ситуаций (разные клиренсы транспортных средств, использование в электротехнологических процессах растениеводства и др.) данное мероприятие может повысить эффективность БСЭЗ (патент № 2501199 С2). Указанные элементы, точнее их
места закладки, кроме своего главного назначения, могут определять трассу перемещения технологических агроагрегатов.
Практические реализации однопроводниковых резонансных систем в контактном исполнении для электроснабжения реальных объектов описаны в [14–15].
Выводы. Для ведения точного аграрного производства, особенно в условиях территориально рассредоточенного размещения крупных сельскохозяйственных объектов и при отсутствии достаточных трудовых человеко-ресур-сов, необходимы новые роботизированные технические средства. Весьма перспективно применение здесь мобильных подвижных агрегатов и систем наземного и воздушного базирования, в том числе, беспилотных. Био-агротехнологизация МАС с разработкой уникальных и оригинальных поисково-преобразовательных функций, адаптированных в современные агротехнологии, позволит существенно повысить уровень и изменить условия производства и повысить качество агропродукции.
Условия функционирования территориально рассредоточенных сельскохозяйственных объектов вызывает необходимость создания специальной инфраструктуры их технологической поддержки, управления, энергообеспечения и обслуживания МАС. Существенное сокращение затрат и сроков сооружения данной инфраструктуры обеспечит размещение входящих в неё устройств (технологические датчики, системы технического зрения, дальномеры, лидары, устройства передачи информации, блоки системы управления и т.п.) на территории функционирования МАС или вблизи неё. На специально оборудованных площадках рационально использовать базы дислокации мобильных технологических агрегатов с системами дистанционной подзарядки аккумуляторов этих агрегатов, а на мачтах и опорах – системы подзарядки аккумуляторов МСА воздушного функционирования.
Предложенная инфраструктура, принципы её использования могут быть применены не только при управлении земельными угодьями, но для решения других важных задач: для управления территориями в режиме реального времени и их охраны, при реализации технологий дистанционного наблюдении за лесными массивами для обнаружения очагов пожаров, поиска людей и т.п.
Исходя из требований экономичности, энергосбережения и автоматизации технологических процессов перспективно применение электрифицированных агрегатов с бесконтактным электроснабжением при перемещении объекта с использованием однопроводниковой резонансной системы передачи электроэнергии.
Список литературы Наземные и воздушные агротехнологические агрегаты с бесконтактным электропитанием и управлением
- Архипов А.Г., Косогор С.Н., Моторин О.А., Горбачев М.И., Суворов Г.А., Труфляк Е.В. Цифровая трансформация сельского хозяйства России / Минсельхоз России, ФГБУ "Центр Агроаналитики", ФГБУ "Аналитический центр Минсельхоза России", ФГБОУ ВО "Кубанский государственный аграрный университет имени И.Т. Трубилина". Москва: Российский научно-исследовательский институт информации и технико-экономических исследований по инженерно-техническому обеспечению агропромышленного комплекса, 2019. 80 с. ISBN 978-5-73671495-7. EDN TKKKIH
- Шевченко А.В., Мигачев А.Н. Обзор состояния мирового рынка беспилотных летательных аппаратов и их применения в сельском хозяйстве // Робототехника и техническая кибернетика. 2019. Т. 7. № 3. С. 183-195. DOI 10.31776/RTCJ.7303. EDN DUIFRB
- Чуйкин К.А. Влияние дронов и искусственного интеллекта на сельское хозяйство // Актуальные проблемы авиации и космонавтики. 2018. Т. 2. № 4(14). С. 389391. EDN YUIIAX
- Shulin Yang, Xiaobing Yang, Jianyou Mo. The application of unmanned aircraft systems to plant protection in China // Precision Agriculture. 2018. Vol. 19(2). Р. 278-292. DOI: 10.1007/s11119-017-9516-7
- Yufei Liu, Noboru Noguchi, Lingguang Liang. Development of a positioning system using UAV-based computer vision for an airboat navigation in paddy field // Computers and Electronics in Agriculture. 2019. Vol. 162 (12). Р. 126133. D0I:10.1016/j.compag.2019.04.009
- Kalyaev I.A., Gaiduk A.R., Kapustyan S.G. UAV group control in task of order forming // Robotics and Technical Cybernetics. 2014. No 4(5). P. 28-39. EDN TCWGWX
- Huuskonen Janna, Oksanen Timo. Soil sampling with drones and augmented reality in precision agriculture. Computers and Electronics in Agriculture. 2018. Vol. 154. Р. 25-35. DOI: 10.1016/j.compag.2018.08.039
- Kirtan Jha, Aalap Doshi, Poojan Patel, Manan Shah. A comprehensive review on automation in agriculture using artificial intelligence // Artificial Intelligence in Agriculture. 2019. Vol. 2(3). Р. 1-12. DOI: 10.1016/j.aiia.2019.05. 004
- Башилов А.М., Королев В.А. Аэромобильные устройства в технологиях пастбищного животноводства // Вестник аграрной науки Дона. 2023. Т. 16. № 1(61). С. 5465. DOI: 10.55618/20756704_2023_16_1_54-65. EDN: QEBTYQ
- Башилов А.М., Королев В.А., Арженовский А.Г., Глобин А.Н., Глечикова Н.А. Проактивное моделирование динамической сложности агротехноценозов // Вестник аграрной науки Дона. 2020. № 3(51). С. 45-54. EDN YHXHMD
- Гнатюк В.И. Закон оптимального построения техноценозов: монография. - Москва-Берлин: Директ-Медиа, 2019. 477 с. ISBN 978-5-4499-0162-0. EDN VOZMOH
- Свентицкий И.И., Касумов Н.Э., Мудрик В.А. Эксергетическая, энергоинформационная теоретизация аграрно-экологических знаний // Вестник ВИЭСХ. 2013. № 3(12). С. 10-19. EDN: RAFUOD
- Свентицкий И.И. Естественнонаучная основа всеединства знаний. Эксергетическая теория урожая: монография. Москва: ФГБНУ ВИЭСХ, 2015. 316 с. ^N 978-5-903413-36-2. sii_1-316.pdf (skibr.ru) (дата обращения 21.12.2023)
- Стребков Д.С., Некрасов А.И. Резонансные методы передачи электрической энергии: посвящается памяти Николы Тесла: монография. 3-е изд. Москва: Всероссийский научно-исследовательский институт электрификации сельского хозяйства, 2008. 351 с. ISBN 978-585941-134-4. EDN: QMJZLV
- Юферев Л.Ю., Стребков Д.С., Рощин О.А. Экспериментальные модели резонансных систем электрической энергии. Москва: ООО «Оригинальная компания», 2010. 217 с. EDN: UCVZVZ
