Нечеткий регулятор как средство повышения точности позиционирования и быстродействия в системе управления малыми линейными перемещениями

Автор: Маргацкая Елена Александровна, Гордеев Сергей Александрович
Журнал: Вестник Южно-Уральского государственного университета. Серия: Энергетика @vestnik-susu-power
Рубрика: Электромеханические системы
Статья в выпуске: 4 т.14, 2014 года.
Бесплатный доступ
Рассмотрена задача синтеза нечеткого регулятора для управления положением электромагнитного клапана выдоха аппарата искусственной вентиляции легких. Предлагается использование несимметричной базы правил, условно состоящей из двух подсистем, отличающихся по принципу формирования управляющего воздействия в зависимости от характера действия нагрузки. Так, в направлении сопротивления движению применяется принцип стартстопного управления как оптимального по быстродействию, для противоположного направления характерно относительно плавное изменение управления с целью устранения значительного по величине перерегулирования. Для функции принадлежности входной переменной регулятора ∆x (ошибка по положению) рекомендуется несимметричное расположение термов относительно центрального, символизирующего смену направления движения. Это позволяет избежать состояния устойчивой колебательности положения рабочего органа клапана. Результаты моделирования разработанной системы управления на базе нечеткой логики показывают высокое качество переходных процессов как по быстродействию, так и по точности позиционирования, что позволяет рекомендовать разработанные принципы синтеза нечеткого регулятора для управления объектами, по принципу действия схожими с рассматриваемым электромагнитным клапаном выдоха.
Нечеткий регулятор, алгоритм сугэно, генетический алгоритм, электромагнитный клапан выдоха аппарата искусственной вентиляции легких
Короткий адрес: https://sciup.org/147158287
IDR: 147158287 | УДК: 681.532.1/681.5.013
Fuzzy controller as means of increase of positioning accuracy and performance in the control system for small linear displacements
The article considers the problem of synthesis of a fuzzy controller to regulate the position of the solenoid exhalation valve of lungmotor. It is proposed to use asymmetric rule base, conventionally consisting of two subsystems that differ according to the principle of forming the control action due to the nature of the resistance force. Thus, in the direction of resistance to motion the principle of start-stop control is applied as optimal with respect to positioning speed. The attribute of the opposite direction is relatively smooth change of control in order to eliminate overshoot significant in magnitude. For the membership function of the regulator input variable ∆x (position error) it is recommended to use asymmetrical arrangement of the terms relative to the center symbolizing the change of direction. This allows avoiding of the state of stable oscillation of the valve working body position. The simulation results for the developed control system based on fuzzy logic show the high quality of transients both in speed and in accuracy of positioning which allows recommendation of the principles of fuzzy controller synthesis that are similar to considered electromagnetic exhalation valve in working principle.
Текст научной статьи Нечеткий регулятор как средство повышения точности позиционирования и быстродействия в системе управления малыми линейными перемещениями
Так называемые классические системы регулирования дают не вполне оптимальное решение задачи управления электромагнитным клапаном выдоха [1], поскольку не предоставляют возможности создания некоторой единой аналитической зависимости, выражающей вектор управляющих воздействий при всех возможных состояниях объекта управления, что особенно критично при изменении направления движения. В таком случае рационально обратиться к алгоритмам интеллектуального управления, которые в общем определении обладают способностью к пониманию и обучению в отношении объекта управления, возмущений, внешней среды, условий работы. Так, для многих технических и промышленных приложений, в частности для управления электроприводами, в большинстве случаев применяются интеллектуальные регуляторы, построенные на основе алгоритмов нечеткой логики и искусственных нейронных сетей.
Нейронные сети представляют собой обучаемые динамические системы, оценивающие характеристики вход-выход. Нечеткие системы преобразуют наборы структурированных данных, связанных с объектом управления, в соответствующие управляющие воздействия. Нейронные и нечеткие системы имеют принципиальное преимущество перед традиционными системами управления: для их реализации не требуется априорная математическая модель объекта управления [2].
При выборе алгоритма интеллектуального управления для электромагнитного клапана выдоха, кроме общей теории [3–7], рассматривались несколько работ, где системы управления на осно- ве нейронных сетей сравниваются с нечеткими [2, 8]. Отмечается, что одним из недостатков нейронного управления является необходимость предварительного обучения, а также важен обоснованный выбор структуры модели и параметров обучения. Затраты времени на вычисление нейросетевого алгоритма управления достаточно велики, однако он показывает лучшие характеристики слежения даже при наличии внешних возмущающих воздействий. Для нечеткого регулятора имеется ряд факторов и величин, которые требуется предварительно выбрать, однако некоторые из них могут быть определены эвристически или методом проб и ошибок. Затраты времени на вычисление нечеткого алгоритма минимальны, поскольку главным образом используются логические операции и сравнения. При этом нечеткий регулятор демонстрирует лучшую устойчивость к изменениям параметров объекта, обеспечивая малые флуктуации на выходе.
Подводя итог, можно заключить, что решить поставленную задачу управления клапаном выдоха в полной мере позволит и алгоритм нейронной сети и алгоритм нечеткой логики. Фактически не существует подробных рекомендаций по выбору того или иного способа интеллектуального управления, поэтому в пользу большей простоты по принципам организации и функционированию, меньшей вычислительной сложности приоритет в реализации в данном случае отводится алгоритму нечеткой логики.
Синтез нечеткого регулятора
Целью синтеза нечеткого алгоритма является обеспечение высокого быстродействия и точности позиционирования объекта регулирования, который в данном случае представляет собой мембрану, осуществляющую регулирование проходного отверстия в линии выдоха пациента. Общий вид нечеткого регулятора (НР) при этом представляется в виде следующей функциональной схемы [3] (рис. 1).
В блоке фаззификации входные лингвистические переменные качественно характеризуются терм-множествами, в блоке формирования логического решения проходит процедура определения степени истинности условий по каждому из правил системы нечеткого вывода, в блоке дефаззи-фикации используются результаты аккумуляции всех выходных лингвистических переменных для получения обычного количественного значения выходной переменной.
Основу синтеза нечетких алгоритмов управления составляет база знаний, формируемая в виде совокупности нечетких предикатных правил. Исходя из обозначенной цели синтеза, в качестве управляемых координат целесообразно назначить величину ошибки по положению Дх и скорость ее приращения V (рис. 2), которая также является текущей скоростью рабочего органа клапана и внесет в систему некоторый элемент предсказания поведения объекта регулирования. По принципу действия устройства выходной координатой НР должна выступать величина напряжения, подаваемого на обмотку клапана. Однако предполагая возможность практической реализации системы управления на базе микропроцессорной техники, рационально заменить выходное значение на величину скважности у-импульсов при ШИМ-управлении. Тогда, подразумевая симметричный способ управления ШИП как оптимального, в данном случае, будет справедлива следующая известная зависимость: ия = 2yUn — ип, где ип - напряжение питания от источника постоянного тока, ия - регу- лируемое напряжение, подаваемое на обмотку клапана.
На рис. 2 приведены следующие обозначения: ДП - датчик положения [9], х3 - сигнал задания по положению, хос - сигнал обратной связи, Rя - сопротивление обмотки клапана, Тя - электромагнитная постоянная времени обмотки клапана, тя -масса подвижной части клапана, кФ - конструктивный коэффициент, Еэм — электромагнитная сила, Fc — сила сопротивления.
Для описания объекта с помощью нечетких множеств будем полагать, что каждая их двух входных и выходная переменная регулятора рассматривается как лингвистическая переменная, принимающая 7 возможных значений (термов):
-
• NL – большая отрицательная ( Negative Large );
-
• NM – средняя отрицательная ( Negative Middle );
-
• NS – малая отрицательная ( Negative Small );
-
• Z – около нуля ( Zero );
-
• PS – малая положительная ( Positive Small );
-
• PM – средняя положительная ( Positive Middle );
-
• PL – большая положительная ( Positive Large ).
В результате на основании введенных обозначений правила работы электромагнитного клапана могут быть представлены в следующем виде:
Rt: ЕСЛИ Дх = Atl И V = At2, ТО у = Bt , где A (j - множества функций принадлежности i-му терму j-й переменной, Bt - множество функций принадлежности i-му терму выходной переменной.
В результате использование по 7 функций принадлежности для каждой входной переменной приводит к формированию 49 правил работы НР, составляющих базу знаний, которая представлена в таблице.
Отличительной особенностью разработанной базы знаний является ее несимметричность, т. е. совокупность правил для направления движения в
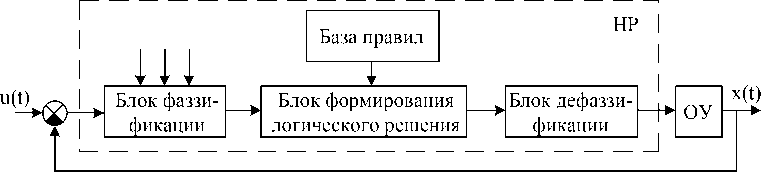
Рис. 1. Обобщенная блок-схема нечеткого регулятора
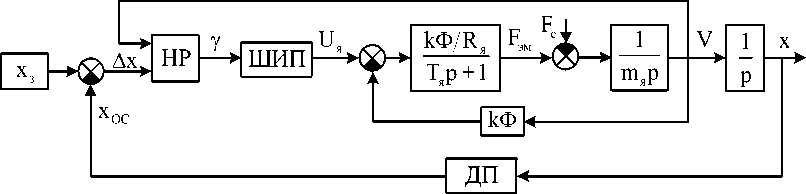
Рис. 2. Структурная схема замкнутой САР электромагнитного клапана выдоха с нечетким регулятором
База правил нечеткого регулятора
Следует отметить, что в базе знаний отсутствует правило для ситуации, когда и ошибка Дх и скорость V принимают значение Z. Это состояние системы управления оставлено неопределенным для корректной работы НР как при наличии, так и при отсутствии нагрузки. Так, к примеру, если ввести правило вида «Если Дх = Z и V = Z, то у = Z», то без нагрузки объект регулирования перейдет в установившейся режим с заданной точностью и быстродействием. Однако под действием нагрузки, скажем, в сторону закрытия линии выдоха, это правило приведет к тому, что рабочий орган клапана будет неспособен удерживать заданное положение. При этом, несмотря на отсутствие указанного правила, НР способен формировать некоторое оптимальное управляющее воздействие при Дх = Z и V = Z, о чем свидетельствуют графики переходных процессов на рис. 4.
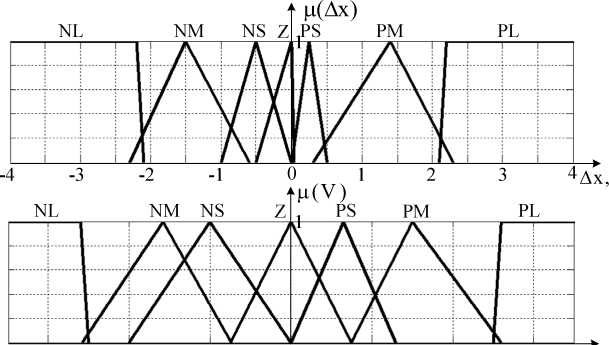
При описании базы правил упоминалось, что каждому терму отдельной входной переменной соответствует функция принадлежности, которая представляет степень принадлежности каждого члена пространства рассуждения к данному нечёткому множеству. Как отмечается в источниках [3 – 8], не существует каких-либо определенных рекомендаций по выбору формы функций принадлежности. Поэтому к рассмотрению была принята тре-
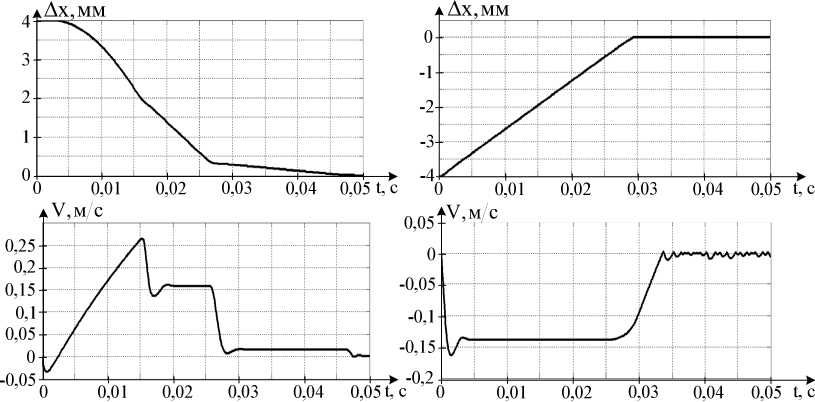
а)
б)
Рис. 3. Графики переходных процессов ошибки по положению Дх(t") и ее производной V(t) : а – при противодействующем характере нагрузки (при перекрытии линии выдоха);
б – при открытии линии выдоха
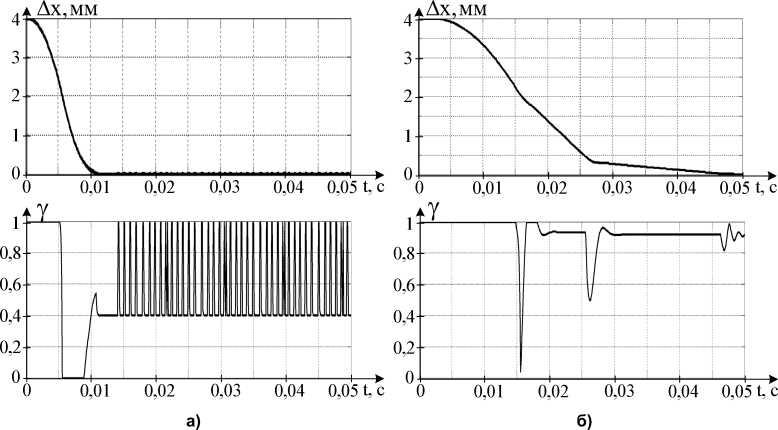
Рис. 4. Графики переходных процессов ошибки по положению Дx(t) и ее производной V(t) : а – при перекрытии линии выдоха без нагрузки; б – при перекрытии линии выдоха под нагрузкой
угольная форма центральных термов и трапециевидная для граничных (рис. 5), которые являются одними из типовых и вполне соответствуют сущности введенных термов.
Следует обратить внимание, что, как и в случае разработки базы правил, функции принадлежности для переменной Дх несимметричны относительно состояния Z, переход через которое свидетельствует о смене направления движения. Это связано с тем, что в отсутствии правила для состояния Дх = Z и V = Z доминирующими становятся два ближайших правила «Если Дх = NS и V = Z, то у = PL» и «Если Дх = PS и V = Z, то у = NL», а при равной ширине термов NS и PS у переменной Дх система в установившемся режиме переходит в состояние устойчивой колебательности.
На рис. 5 представлен результат экспертной настройки параметров функций принадлежности термов каждой из входных переменных нечеткого регулятора. Однако с целью уменьшения затрат времени на проектирование для оптимизации параметров термов можно воспользоваться генетическим алгоритмом [10–13] таким образом, чтобы минимизированть различие между желаемым и теоретическим поведением объекта. Такой подход подразумевает кодирование требуемых параметров нечеткого логического регулятора с помощью хромосом и организацию эволюционирующей во времени популяции.
Предположим, что нахождение оптимальной величины каждого из параметров требуется определить с точностью 0,125, тогда каждый из них будет кодироваться в виде 6-битовой двоичной хромосомы, где первый бит отвечает за знак параметра, остальные – за числовой носитель, а набор параметров, характеризующий функцию принадлежности входной переменной, можно представить в виде составной хромосомы (рис. 6).
На рис. 6 введены следующие обозначения: / - центральный параметр i -го терма, ct - левый
мм
-0,6 -0,4 -0,2
V,мс
Рис. 5. Функции принадлежности нечетких множеств входных переменных
граничный параметр i-го терма, е, - правый граничный параметр i-го терма, sk - цифры из множества {0,1}. Учитывая, что в данном случае к = 0,1... 6, декодирующее преобразование будет задаваться формулой х ?V. s.2/ (1)
где х - вычисляемый параметр терма.
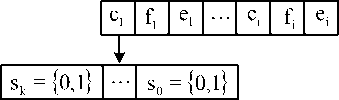
Рис. 6. Кодирование параметров термов входных переменных нечеткого регулятора
Далее из некоторого числа составных хромосом (см. рис. 6) формируется начальная популяция, которая используется для вычисления последующих популяций с использованием трех генетических операторов: отбора, кроссинговера и мутации. Общая структура работы генетического алгоритма (Васильев; Бураков) принимает вид рис. 7.
В качестве алгоритма логического вывода принят алгоритм Сугэно, который в отличие от других классических алгоритмов, таких как алгоритмы Мамдани, Ларсена, Тсукомото, имеет большую точность при меньших вычислительных затратах [14, 15]. Тогда для совокупности m нечетких продукционных правил вида [16]:
Пг: если х1 есть ЛГ1 и если х2 есть Лг2 и ...
и если х„ есть Лгп, то у = уг, где г = 1,2, .т,х;- -j = 1,2,.,и) - компоненты входного вектора, уг - действительные числа,
Лг;- - некоторые нечеткие числа с треугольными функциями принадлежности:
1 к/ -“ т/ 1
1--—'если k-«rv|s* (2)
0, если |х, - аг;-| > Л, где аг;- - центры нечетких чисел Лг;-, Л - постоянный параметр.
Согласно алгоритму нечеткого вывода Сугэно 0-го порядка выходная координата определяется как:
_ 2™ 1 Уг« г -х1)
7i = Й^Ут^ ’ (3)
где аг-х ‘ ) = min{^r 1 (х 1 ),^r 2 (х 2 ), .^ит-х ^ )} -степень истинности предпосылок r-го правила.
Заключение
Типовой характер переходных процессов согласно разработанному НР отражен на рис. 8, который свидетельствует о способности работы клапана выдоха с высокими показателями точности и быстродействия при смене направления движения и различных значениях нагрузки (ошибка не более 0,03 мм, время переходного процесса не более 0,04 с). Задание на перемещение изменяется с интервалом 0,05 с соответственно со сменой направления движения и каждые 0,1 с уменьшается по амплитуде на 1 мм.
В заключение стоит отметить, что поскольку структурная схема электромагнитного клапана выдоха идентична схеме двигателя постоянного тока независимого возбуждения, то разработанный НР может представлять как теоретическую, так и практическую значимость для управления данного класса электродвигателей.
Создание начальной популяции
Новая популяция
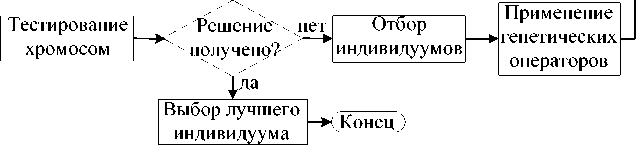
Рис. 7. Общая схема поиска оптимального решения с помощью генетического алгоритма
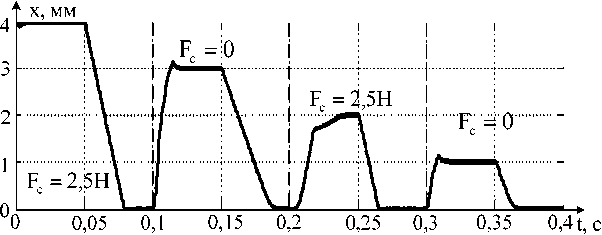
Рис. 8. График переходного процесса перемещения рабочего органа клапана x-t) при различных режимах работы
Работа выполнялась при поддержке Российского фонда фундаментальных исследований в рамках договора № НК 14-07-00514\14 от 10 февраля 2014 г.
Список литературы Нечеткий регулятор как средство повышения точности позиционирования и быстродействия в системе управления малыми линейными перемещениями
- Шабуров, П.О. Электропривод клапана выдоха аппарата искусственной вентиляции легких./П.О. Шабуров, Е.А. Маргацкая//Электротехнические системы и комплексы: междунар. сб. науч. тр. -2012. -Вып. 20. -С. 83-90.
- Омату, С. Нейроуправление и его приложения/С. Омату, М. Халид, Р. Юсоф. -М.: ИПРЖР, 2000. -272 с.
- Васильев, В.И. Интеллектуальные системы управления: теория и практика/В.И. Васильев, Б.Г. Ильясов. -Уфа: УГАТУ, 2007. -446 с.
- Круглов, В.В. Нечеткая логика и искусственные нейронные сети/В.В. Круглов, М.И. Дли, Р.Ю. Голунов. -М.: ФИЗМАТЛИТ, 2001. -201 с.
- Кофман, А. Введение в теорию нечетких множеств/А. Кофман. -М.: Радио и связь, 1982. -432 с.
- Яхъева, Г.Э. Нечеткие множества и нейронные сети/Г.Э. Яхъева. -М.: БИНОМ, Лаборатория знаний, 2006. -316 с.
- Пегат, А. Нечеткое моделирование и управление/А. Пегат. -М.: БИНОМ, Лаборатория знаний, 2013. -798 с.
- Kraft, L.G. A comparison between CMAC neural network control and two traditional adaptive control systems/L.G. Kraft//IEEE Control Systems Magazine. -1990. -Vol. 10. -P. 36-43.
- Маргацкая, Е. А. Определение оптимальной формы сигнального элемента датчика Холла для повышения линейности его выходной характеристики/Е.А. Маргацкая//Известия вузов. Электромеханика. -2014. -№ 2. -С. 53-58.
- Бураков, М.В. Генетический алгоритм: теория и практика/М.В. Бураков. -СПб.: ГУАП, 2008. -164 с.
- Рутковская, Д. Нейронные сети, генетические алгоритмы и нечеткие системы/Д. Рутковская, М. Пилиньский, Л. Рутковский. -М.: Горячая линия -Телеком, 2006. -452 с.
- Аверченков, В.И. Эволюционное моделирование и его применение/В.И. Аверченков. -М.: ФЛИНТА, 2011. -200 с.
- Вороновский, Г.К. Генетические алгоритмы, искусственные нейронные сети и проблемы виртуальной реальности/Г.К. Вороновский. -Харьков: ОСНОВА, 1997. -112 с.
- Мелков, Д. А. Сравнение алгоритмов нечёткого вывода с использованием языков стандарта МЭК/Д.А. Мелков//Молодой ученый. -2013. -№ 5. -С. 74-79.
- Круглов, В.В. Сравнение алгоритмов Мамдани и Сугэно в задаче аппроксимации функции/В.В. Круглов//Нейрокомпьютеры: разработка, применение. -2003. -№ 5.
- Круглов, В.В. Алгоритм самоорганизации системы нечеткого логического вывода/В.В. Круглов, А.А. Усков//Вестник МЭИ. -2002. -№ 5. -С. 104-105.
