Нечеткий регулятор скорости в частотно-управляемом асинхронном электроприводе

Автор: Кривенков Максим Владимирович, Пахомов Александр Николаевич, Иванчура Владимир Иванович
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Авиационная и ракетно-космическая техника
Статья в выпуске: 3 (16), 2007 года.
Бесплатный доступ
Приводится пример использования нечетких регуляторов для стабилизации скорости асинхронного электропривода. Результаты исследований показаны в сравнении с традиционными регуляторами. Исследования подтверждаются статическими и динамическими характеристиками.
Короткий адрес: https://sciup.org/148177817
IDR: 148177817 | УДК: 621.345.1
Fuzzy controller of speed in frequency-controlled the asynchronous electric drive
It is given an example of use of fuzzy controllers for stabilization of speed of the asynchronous electric drive. Resultsof the researches are shown in comparison with traditional regulators. Researches prove to be true static and dynamiccharacteristics.
Текст научной статьи Нечеткий регулятор скорости в частотно-управляемом асинхронном электроприводе
Нечеткие регуляторы на основе систем нечеткого вывода [1; 2] вырабатывают управляющее воздействие подобно человеку-оператору, принимающему решения и следящему за выполнением технологического процесса. Благодаря этому нечеткие регуляторы хорошо зарекомендовали себя и широко используются в качестве регуляторов верхнего уровня, которые служат для выполнения технологического процесса, например, поддержание постоянства температуры, уровня воды в баке и др. При выполнении такого рода задач и проявляется все преимущество нечеткой логики перед традиционной - бинарной [3]. В качестве регуляторов нижнего уровня, осуществляющих регулирование координат (скорость, момент, ток, потокосцепление), чаще применяются традиционные П-, ПИ- и ПИЦ-регуляторы.
Задачей исследования является синтез нечеткого регулятора нижнего уровня и сравнение его с традиционным регулятором. Рассматриваемые регуляторы предназначены для стабилизации скорости частотно-управляемого асинхронного электропривода, структурная схема которого представленная на рис. 1
При построении модели АЦ были сделаны следующие допущения: все фазы обмотки машины симметричны, т. е. активные и индуктивные сопротивления фазных обмоток равны; параметры машины постоянны, т. е. не учитываются изменения параметров вследствие насыщения магнитной цепи, вытеснения тока, изменения температуры; соединения обмоток статора «звезда» без вывода нулевой точки; магнитная индукция распределена вдоль воздушного зазора синусои дально при синусоидальном напряжении питания; момент инерции постоянен.
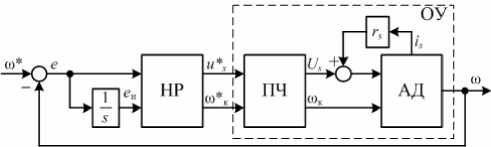
Рис. 1. Асинхронный электровод: НР - нечеткий регулятор;
ПЧ - преобразователь частоты; АЦ - асинхронный двигатель; ОУ - объект управления; to* - задание на скорость; е - ошибка регулирования;
еи - проинтегрированное значение ошибки; to - угловая скорость; u *s - управляющее воздействие по амплитуде напряжения на статоре; to* к - управляющее воздействие по частоте; is - ток статора; rs - активное сопротивление статорной цепи
При сделанных допущениях математическая модель АЦ описывается следующими дифференциальными уравнениями [4]:
U
xs
э
xs
^^^^^^е
K
—щ • r • T • i-- — • T — k э э ys t xr
r
K • Z • щ- T p yr
M
э
U = r • Гг • p +1] • i + ys э э ys
+ щ. • r • Г • i - k э э xs
K
--r • T + K • Z • щ* T , T yr r p xr
r p •щ = J.(M э - M c),
3 • Z
p
• K
r
Y • i -Y • i xr ys yr xs
i s

+ i 2 ys
Модель АД представлена в декартовой системе координат, вращающейся с произвольной скоростью ( to ), что позволяет перейти от изменяющихся по синусоидальному закону величин к постоянным величинам. Вектор U ориентирован по оси х (проекция вектора U s на ось у принимается равной нулю).
Преобразователь частоты принят безинерционным звеном при следующих допущениях: все вентили преобразователя - идеальные ключи, имеющие в проводящем состоянии сопротивления, равные нулю, в непроводящем -бесконечности; время переключения вентилей равно нулю.
На вход регулятора (рис. 1) подаются ошибка по скорости и проинтегрированное значение ошибки. Регулятор вырабатывает два управляющих воздействия - и * и о/. (фактически НР вырабатывает сигнал щ‘к, а сигнал и получается масштабированием сигнала to * ). Оба сигнала являются заданием для преобразователя частоты. Следует отметить, что рассмотренная структура частотнорегулируемого электропривода реализует закон частотного управления с ir-компенсацией.
Основу алгоритма НР составляет база правил, определяющая взаимосвязь физических и логических переменных на качественном уровне [1-3]. Дополнительно к правилам в состав алгоритма входят функции принадлежности, количественно определяющие взаимосвязь физи
ческих переменных с термами.
Для входных переменных были использованы кусочно-линейные функции принадлежности: треугольные, линейные 5-образные и линейные Z-образные [2].
База правил состоит из нечетких правил простого типа, содержащих одно подусловие и одно заключение, например: если «ошибка - малая положительная», то «управление - малое положительное» и т. д.
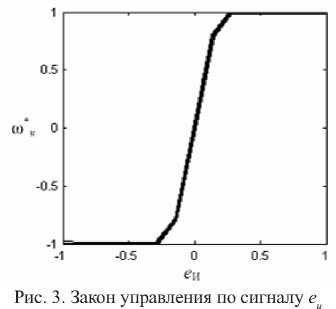
Все правила в базе можно условно разбить на две группы. Правила первой группы относятся только к входной переменной е и учитывают весь диапазон ее изменения. Правила второй группы относятся только к входной переменной еи. Таким образом, мы можем формировать законы управления по каждой входной переменной независимо друг от друга: закон управления по сигналу е (рис. 2), закон управления по сигналу еи (рис. 3). Это увеличивает количество правил в базе, но упрощает сами правила и процесс синтеза регулятора.
Следует отметить, что условием нормального функционирования нечеткого регулятора, как и любого дру
гого, является отсутствие недопустимых значений измеряемых координат, уводящих процесс из под контроля. В нашем случае если значение переменных е или еи выйдет из диапазона [-1, 1] (рис. 2, 3), то возникнет неучтенная базой нечетких правил ситуация и, как следствие, потеря устойчивости системы. Во избежание этого на входе регулятора в модели системы ЭП включены звенья, ограничивающие сигналы в нужном диапазоне.
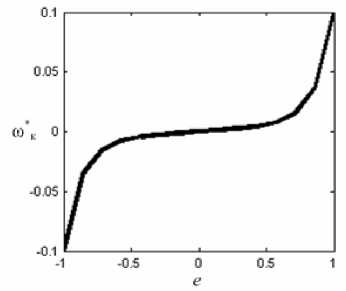
Рис. 2. Закон управления по сигналу е
При помощи НР может быть реализован практически любой алгоритм управления, в том числе и традиционные П-, ПИ-, ПИД-регуляторы. Первоначально был реализован НР с традиционным (линейным) пропорционально-интегральным законом управления.
Полученные переходные процессы рассматриваемой системы ЭП с традиционным ПИ-регулятором показали, что он не обеспечивает требуемые показатели качества регулирования (перерегулирование не выше 5% с минимальным временем переходного процесса), поэтому было принято решение перейти к нелинейному НР, реализующему закон управления с переменными составляющими (пропорциональной и интегрирующей) на всем диапазоне регулирования. Закон управления (рис. 2, 3) получен в ходе проведенных исследований и настройки нечеткого регулятора.
При настройке НР [3] увеличивалось число термов для переменных, корректировались значения отдельных термов и сама база правил. В итоге получен регулятор, обеспечивающий надежную стабилизацию скорости системы электропривода и минимизацию бросков момента и токов в переходных режимах.
Исследования производились при помощи пакета MatLab с использованием приложения Риггу Logic Toolbox, где разрабатывался и настраивался НР, и при-
ложения Srmulink для изучения переходных характеристик.
Качество регулирования оценивалось по графикам переходных характеристик скорости и момента электропривода (рис. 4).
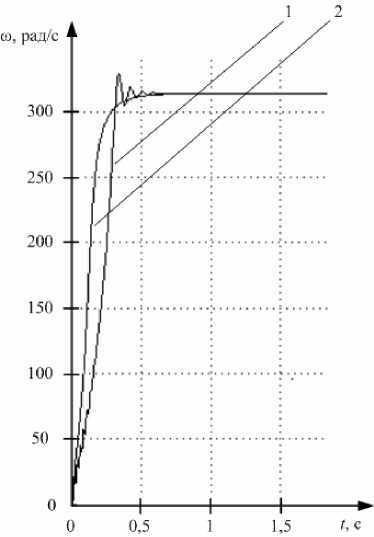
Рис. 4. Переходные характеристики при пуске системы: 1 - разомкнутой; 2 - замкнутой
В замкнутой системе с НР переходный процесс разгона АД носит апериодический характер при сохранении быстродействия.
Переходные характеристики при набросе номинальной нагрузки в момент времени t = 2 приведены на рис. 5.
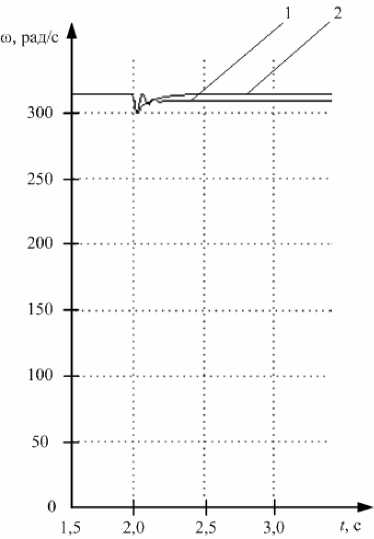
Рис. 5. Переходные характеристики при набросе номинальной нагрузки с системы: 1 - разомкнутой;
2 - замкнутой
При набросе нагрузки замкнутая система с нелинейным НР отрабатывает задание без ошибки с таким же динамическим перепадом скорости, как и в разомкнутой системе.
Также были сняты механические характеристики электропривода в статическом режиме с различными регуляторами (рис. 6). Система электропривода с нелинейным НР обладает абсолютно жесткой механической характеристикой (кривая 3). При другой настройке НР жесткость механической характеристики ЭП (кривая 2) приближается к естественной (кривая 1). Поэтому в зависимости от требований технологического процесса возможна работа на механической характеристике с изменяемой жесткостью: от абсолютно жесткой до естественной.
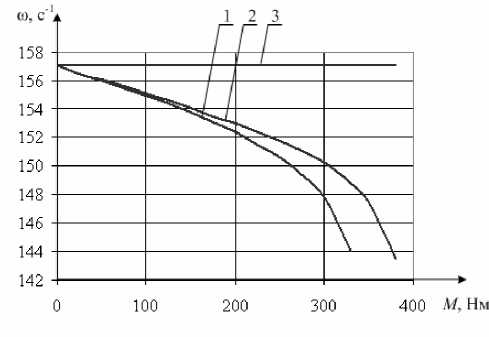
Рис. 6. Механические характеристики электропривода
Проведено исследование системы с разработанным НР на грубость, поскольку процессы в реальных системах из-за приближенности математической модели лишь в редких случаях соответствуют расчетным. Было увеличено и уменьшено на 75 % активное сопротивление ротора машины. Система осталась устойчивой с допустимыми ухудшениями показателей качества. Отсюда можно сделать вывод о том, что система обладает необходимой грубостью.
В результате проведенных исследований был разработан НР, обеспечивающий надежную стабилизацию скорости АД на заданном уровне.
