Нечёткое адаптивное управление зерноуборочным комбайном

Автор: Паршин Дмитрий Яковлевич, Шевчук Денис Геннадьевич
Журнал: Advanced Engineering Research (Rostov-on-Don) @vestnik-donstu
Рубрика: Технические науки
Статья в выпуске: 7 (68) т.12, 2012 года.
Бесплатный доступ
Рассматривается решение задачи адаптивного управления траекторией движения и загрузкой рабочих органов зерноуборочного комбайна на основе нечёткого логического вывода. Приводится формализация задачи нечёткого управления комбайном в постоянно изменяющихся условиях работы. Представлены лингвистические переменные, характеризующие параметры управления и поверхности «входы-выходы» зависимостей и соответствующие синтезированной нечёткой системе продукционных правил. Описаны параметры терм-множеств лингвистических переменных и функций принадлежности для многопараметрической системы нечёткого адаптивного управления комбайном. Представлена имитационная модель нечёткого микроконтроллера, реализованная в системе MatLab Simulink с помощью Fuzzy Logic Toolbox, приводятся результаты моделирования. Представленные в статье база правил и механизм вывода решений составляют основу многопараметрической системы адаптивного управления зерноуборочным комбайном, реализуемую на базе нечёткого управления.
Зерноуборочный комбайн, нечёткое управление, лингвистическая переменная, функция принадлежности
Короткий адрес: https://sciup.org/14249925
IDR: 14249925 | УДК: 631.354.2.076-52
Fuzzy adaptive control of grain combine
The solution to the problem on the adaptive control of the motion path and combine tools loading based on fuzzy logic inference is considered. The problem formalization of the fuzzy combine control under the frequently changing operation conditions is resulted. The linguistic variables which characterize the control parameters and the “inputs-output” dependence surface and conform to the production synthesized fuzzy system are presented. The term-set parameters of the linguistic variables and membership functions for the fuzzy multivariable adaptive control system of the grain combine are described. The fuzzy microcontroller simulation model implemented in MatLab Simulink system with Fuzzy Logic Toolbox is presented. The simulation results are given. The presented rule base and inference mechanism form the basis of the multivariable adaptive fuzzy control system of the grain combine.
Текст научной статьи Нечёткое адаптивное управление зерноуборочным комбайном
Введение. Оператору в полевых условиях приходится решать достаточно трудную задачу обеспечения оптимальной настройки комбайна в соответствии с изменяющимися условиями окружающей среды. Её решение в основном обеспечивается опытом и интуицией механизатора. Неквалифицированное регулирование параметров технологического процесса (ТП) приводит к значительным затратам времени на простои, увеличению потерь убираемого урожая и, как следствие, снижению сменной производительности машины, увеличению расхода топлива на единицу выполненной работы, снижению качества ТП в целом. Реализация преимуществ сложных по конструкции и обслуживанию зерноуборочных машин и достижение высоких показателей качества и производительности их работы возможны лишь при автоматизации управления комбайном.
Формализация задачи нечёткого управления зерноуборочным комбайном. В настоящее время отсутствует адекватное математическое описание процесса управления ТП зерноуборочного комбайна. Имеющиеся корреляционно-регрессионные зависимости между внешними факторами, регулируемыми параметрами и показателями качества работы представляют собой достаточно громоздкие математические конструкции (причём не всегда адекватно отражающие действительность), и их использование в реальном времени и в сложных практических условиях затруднено [1].
Задача управления ТП зерноуборочного комбайна в постоянно изменяющихся условиях работы есть задача принятия решения в нечёткой среде (рис. 1). Поэтому наиболее приемлемым методом построения системы автоматического управления комбайном является нечёткое управление с адаптацией по загрузке молотильно-сепарирующего устройства (МСУ) в зависимости от степени загрузки двигателя и потерь зерна.
Методика моделирования процесса нечёткого управления комбайном основана на использовании аппарата нечётких множеств и содержит этапы: фаззификации, композиции и дефаззи-фикации [2]. На этапе фаззификации необходимо представить условия решения задачи в лингвистической форме. На этапе композиции все нечёткие множества, назначенные для каждого терма каждой входной переменной, объединяются, и формируется единственное нечёткое множество — значение для каждой выводимой лингвистической переменной (ЛП). В результате использования набора правил — нечёткой базы знаний — вычисляется значение истинности для предпосылки каждого правила на основании конкретных нечётких операций, соответствующих конъюнкции или дизъюнкции термов в левой части правил. Суть этапа дефаззификации заключается в выработке на основе нечёткого логического вывода конкретных рекомендаций по установлению конкретных значений регулируемых параметров машины.
Рис. 1. Общая схема системы нечёткого управления зерноуборочным комбайном ФП — база данных параметров функций принадлежности
Центральной научной проблемой при разработке информационных интеллектуальных систем является представление знаний рассматриваемой предметной области. Для представления знаний используется обобщённая модель предметной области в виде [3]:
СЦХ;Ц;бу / = 1,л
где X— множество объектов предметной области; Ц — множество типов связи между ними; G— отображение, задающее связи между объектами, входящими в X, из заданного набора типа связей.
Приближённые рассуждения представляют собой процесс, при котором из нечётких посылок выводятся некоторые следствия (возможно также нечёткие). Лингвистическая модель рассматриваемого процесса адаптивного управления может быть представлена в виде:
Если Хт есть ^ И ... И Хт есть Дт,ТО \ есть Вп И ... И Yn есть В1П,
Если Хг есть Ар1 И ... И Хт есть Арт , ТО Yx есть вр1 И ... И Yn есть врп.
Все параметры модели описываются собственными ЛП, термы которых задаются с помощью средств естественного языка и используются для выражения необходимых качественных оценок. При этом каждому значению ЛП ставится в соответствие нечёткое подмножество со своей функцией принадлежности:
VAki^F^X.y, pMj eF^y где F (X,), F (г,) — множества нечётких подмножеств, определённых на базовых шкалах X, и Y,.
С фактической точки зрения совокупность правил типа (2) задаёт некоторое отображение Um -^V" множества значений входных ЛП в аналогичное множество выходных, причём:
\ит = х U. lei '
И" = X V,.
Соотношения (3) в свою очередь можно поставить в соответствие нечёткое отображение:
S-.F(X^F(YV (4)
гДе х Иж, Мл - AM®// Мел - х Мю ■
Обобщение известного в классической логике правила modus ponens позволяет получить композиционное правило нечёткого вывода:
М5. = Мл
S,
где рд — исходная посылка, получаемая при оценке наблюдаемых данных по входным функциям принадлежности; рв, — нечёткий результат логического вывода на основе знаний, получаемый с помощью отображения (4); • — операция композиции.
Развёрнутая форма нечёткого логического вывода для системы знаний вида (2) может быть представлена [4]:

где х\ — наблюдаемое значение входного параметра.
Моделирование предметной области. Согласно структурной организации многопараметрической системы адаптивного управления зерноуборочным комбайном [5] и её модели [6] в состав бортового микроконтроллера целесообразно ввести два нечётких контроллера, связанных друг с другом через параметры объекта управления. Первый нечёткий контроллер служит для управления электромеханизмом рулевого вала в зависимости от линейного отклонения траектории ориентации s и курсового угла ср. Второй нечёткий контроллер служит для управления скоростью движения vK через серворегулятор гидростатической трансмиссии (ГСТ) ходовой части и загрузкой двигателя уд через электромеханизм подачи топлива.
В табл. 1 представлены ЛП, характеризующие параметры управления для систем нечёткого вывода контроллеров траекторией движения и загрузкой МСУ.
Таблица 1
ЛП многопараметрической системы нечёткого адаптивного управления зерноуборочным комбайном
|
Параметр управления |
Наименование лп |
Нотация ЛП |
Область определения лп |
Единица измерения |
|
Нечёткий контроллер траектории движения |
||||
|
S |
ЛО |
линейное отклонение траектории ориентации |
[-0,1; 0,1] |
м |
|
ф |
КУ |
курсовой угол |
[-10; 10] |
град |
|
Ок |
УП |
параметр управления электромеханизмом рулевого вала |
[-1; 1] |
В |
|
Нечёткий контроллер загрузки МСУ |
||||
|
т6 |
МБ |
крутящий момент на валу битера наклонной камеры |
[2; 4] |
Н-м |
|
тр |
МР |
крутящий момент на валуротора МСУ |
[15,5; 24,5] |
Н-м |
|
\М |
зм |
градиент настройки по загрузке МСУ |
[-1; 1] |
|
|
¥д |
чд |
частота вращения коленчатого вала двигателя |
[500; 2200] |
мин-1 |
|
¥п |
пз |
градиент настройки по потерям зерна |
[0; 2] |
|
|
Пд |
пт |
параметр управления электромеханизмом подачи топлива |
[0; 1] |
В |
|
Пх |
СК |
параметр управления электромагнитным клапаном ГСТ |
[0; 1] |
В |
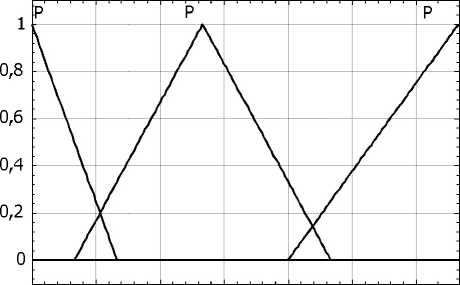
Следующим этапом построения нечёткой системы управления является ввод терм-множеств для каждой ЛП. Для удобства записи применяют специальные сокращения для наименования отдельных термов входных и выходных ЛП [7]: NB — отрицательное большое (наименьшее значение), NM — отрицательное среднее, NS — отрицательное малое, ZN — отрицательное близкое к нулю, Z — нуль (среднее значение), ZP — положительное близкое к нулю, PS — поло- жительное малое, РМ — положительное среднее, РВ — положительное большое (наибольшее значение). При построении нечёткой системы управления зерноуборочным комбайном были использованы треугольная (7), трапециевидная (8) и сигмоидные (9) z- и биформы функции принадлежности [8]:
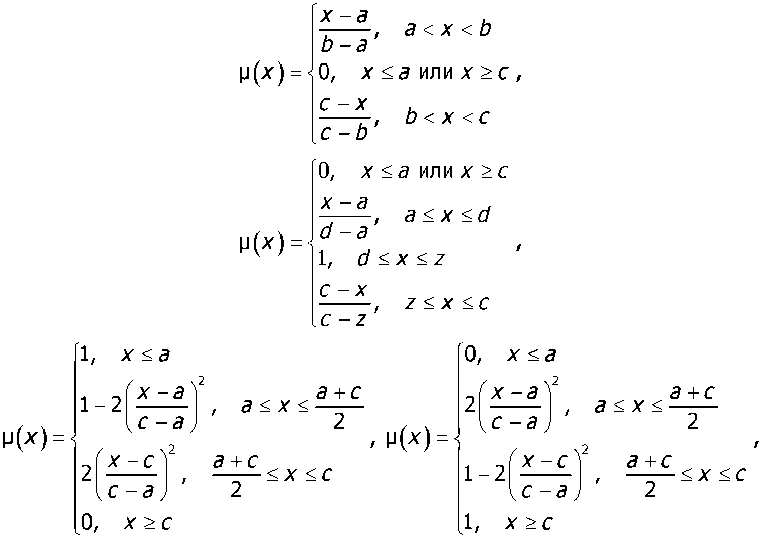
где (а, с) — носитель нечёткого множества — пессимистическая оценка нечёткого числа; Ь — координата максимума; (d, z) — ядро нечёткого множества — оптимистическая оценка нечёткого числа.
Существенным преимуществом таких функций принадлежности является то, что для их определения требуется наименьший по сравнению с остальными функциями объём информации, который в данном случае ограничивается данными об угловых точках.
Параметры терм-множеств ЛП и функции принадлежности для нечёткого котроллера траекторией движения комбайна представлены на рис. 2.
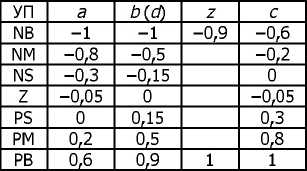
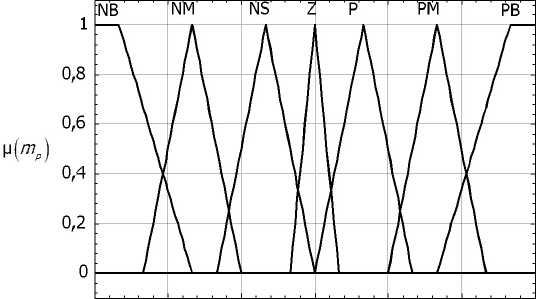
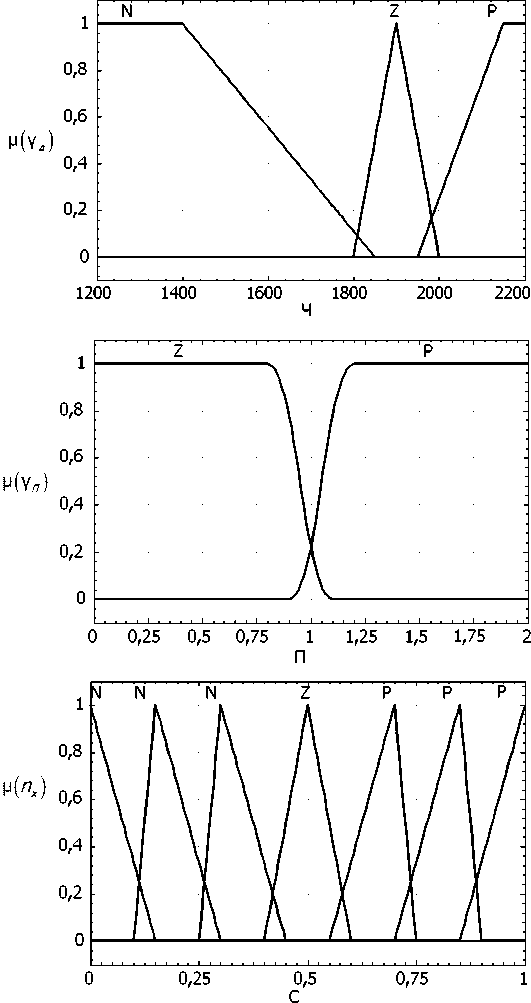
Параметры терм-множеств входных ЛП и функции принадлежности блока адаптации по загрузке МСУ представлены на рис. 3. Выходным параметром блока адаптации является градиент настройки по загрузке МСУ чм, описываемый ЛП ЗМ. В то же время параметр чм является одним из входных параметров анализатора сочетаний.
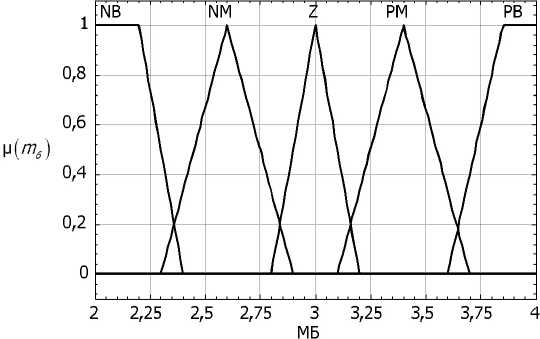
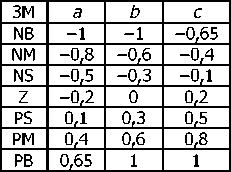
Параметры терм-множеств ЛП и функций принадлежности анализатора сочетаний представлены на рис. 4.
При проектировании нечётких контроллеров основным и неформализуемым этапом является задание набора нечётких правил. Для нечёткого контроллера траектории движения были определены 25 правил нечётких продукций, для блока адаптации по загрузке МСУ — 35 правил, для анализатора сочетаний — 31 правило нечётких продукций. Основной особенностью построенных баз правил является то, что эти правила описывают все возможные значения входных и выходных параметров управления, тем самым исключая возможность неопределённых или противоречивых ситуаций, возникших в результате значительного изменения возмущающих воздействий. Более тонкая настройка модели может быть связана с увеличением количества термов для каждой из входных и выходных переменных, что, в свою очередь, приведёт к увеличению количества правил («проклятие размерности») в системе нечёткого вывода и общему
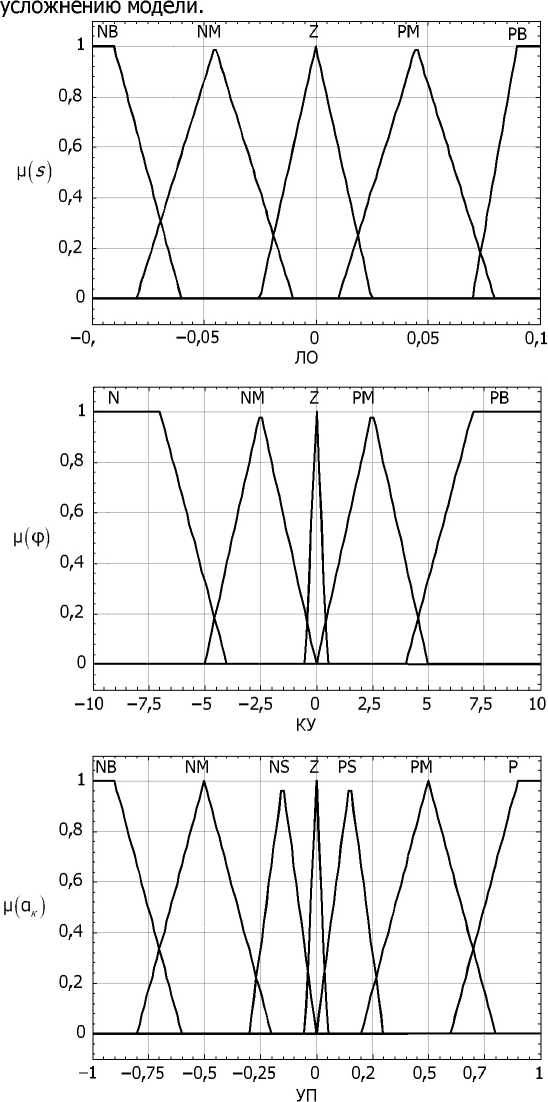
Рис. 2. Параметры терм-множеств ЛП и функций принадлежности для нечёткого котроллера траектории движения
|
ло |
а |
6(d) |
Z |
С |
|
NB |
-0,1 |
-0,1 |
-0,09 |
-0,06 |
|
NM |
-0,08 |
-0,045 |
-0,01 |
|
|
Z |
-0,025 |
0 |
0,025 |
|
|
РМ |
0,01 |
0,045 |
0,08 |
|
|
РВ |
0,07 |
0,09 |
од |
ОД |
|
КУ |
а |
6(d) |
Z |
С |
|
NB |
-10 |
-10 |
-7 |
-4 |
|
NM |
-5 |
-2,5 |
0 |
|
|
Z |
-0,5 |
0 |
0,5 |
|
|
РМ |
0 |
2,5 |
5 |
|
|
РВ |
4 |
7 |
10 |
10 |
Имитационная модель бортового микроконтроллера для нечёткого адаптивного управления. В качестве схемы нечёткого вывода для нечёткого контроллера траектории движения, блока адаптации по загрузке МСУ и анализатора сочетаний был использован метод Мамдани; метод импликации — min, метод агрегирования — max, метод дефаззификации — центр тяжести (centroid) [9]. Такой выбор схемы и методов нечёткого вывода обусловлен высокой точностью и достаточным быстродействием модели. Поскольку во всех правилах в качестве логической связки для подусловий применяется только нечёткая конъюнкция, то для агрегирования использован метод минимального значения — min-конъюнкции (And method), а для аккумуляции заключений правил метод максимального значения — max-дизъюнкции (Or method).
|
МБ |
а |
6(d) |
Z |
С |
|
NB |
2 |
2 |
2,2 |
2,4 |
|
NM |
2,6 |
2,9 |
||
|
Z |
2,8 |
3 |
3,2 |
|
|
РМ |
3,1 |
3,4 |
3,7 |
|
|
РВ |
3,6 |
3,8 |
4 |
4 |
15,5 17 18,5 20 21,5 23 24,5
|
МР |
а |
6(d) |
Z |
С |
|
NB |
15,5 |
15,5 |
16 |
17,5 |
|
NM |
16,5 |
17,5 |
18,5 |
|
|
NS |
18 |
19 |
20 |
|
|
Z |
19,5 |
20 |
20,5 |
|
|
PS |
20 |
21 |
22 |
|
|
РМ |
21,5 |
22,5 |
23,5 |
|
|
РВ |
22,5 |
24 |
24,5 |
24,5 |
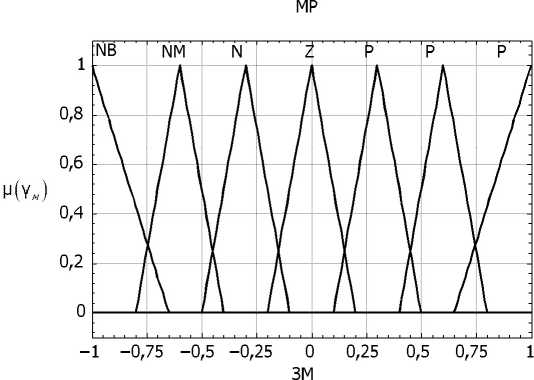
Рис. 3. Параметры терм-множеств ЛП и функций принадлежности блока адаптации по загрузке МСУ
Имитационная модель бортового микроконтроллера для нечёткого адаптивного управления зерноуборочным комбайном реализована в системе Matlab Simulink с использованием Fuzzy Logic Toolbox (рис. 5).
О 0,15 0,3 0,45 0,6 0,75 0,9 1
П
a b(,cf) z __ с
1200 1200 1400 1850
1800 1900 2000
1950 2100 2200 2200
|
пз |
а |
С |
ТИП |
|
Z |
0,8 |
1,1 |
z-форма |
|
РМ |
0,9 |
1,2 |
s-форма |
|
СК |
а |
Ь |
С |
|
NB |
0 |
0 |
0,15 |
|
NM |
0,1 |
0,15 |
0,3 |
|
NS |
0,25 |
0,3 |
0,45 |
|
Z |
0,4 |
0,5 |
0,6 |
|
PS |
0,55 |
0,7 |
0,75 |
|
РМ |
0,7 |
0,85 |
0,9 |
|
РВ |
0,85 |
1 |
1 |
b
О
0,40,7
Рис. 4. Параметры терм-множеств ЛП и функций принадлежности для анализатора сочетаний
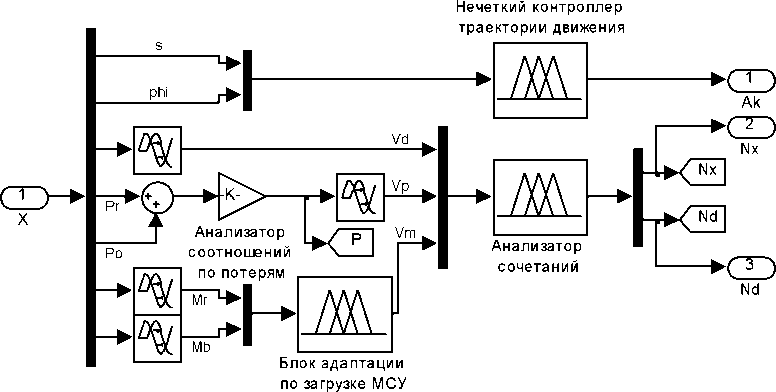
Рис. 5. Модель бортового микроконтроллера в MatLab Simulink и Fuzzy Logic Toolbox
УП
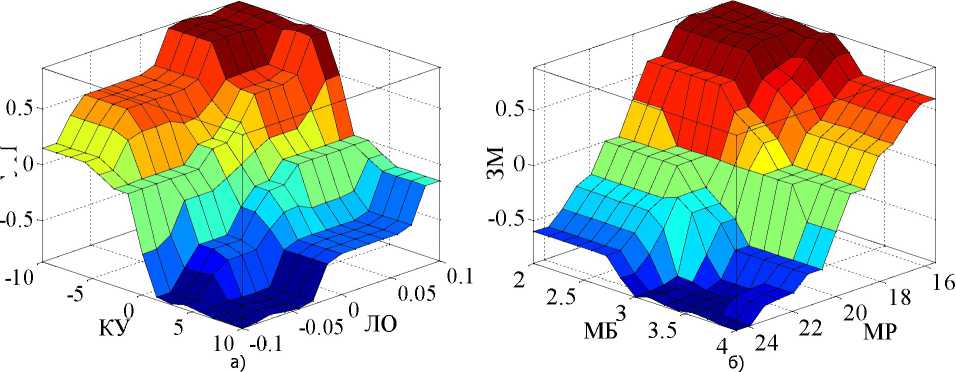
a — курсовой угол (КУ) — линейное отклонение (ЛО) — поворот рулевого вала (УП);
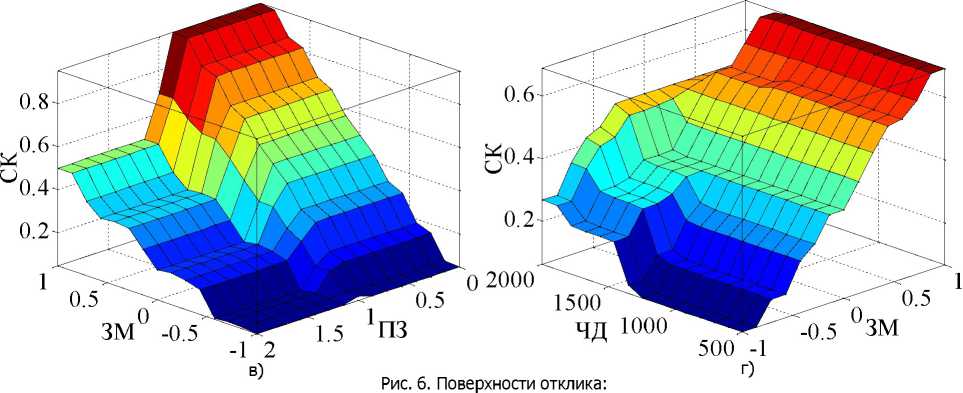
б — момент на валу битера (МБ) — момент на валу ротора (МР) — загрузка МСУ (ЗМ); в — загрузка МСУ (ЗМ) — потери зерна (ПЗ) — скорость комбайна (СК);
г — загрузка МСУ (ЗМ) — загрузка двигателя (ЧД) — скорость комбайна (СК)
Результаты моделирования. На рис. 6 показаны поверхности «входы-выходы» зависимостей, соответствующие синтезированной нечёткой системе продукционных правил. Из рис. 6 видно, что при увеличении момента на валу битера наклонной камеры (МБ) или ротора МСУ (МР) блок адаптации по загрузке генерирует сигнал (ЗМ) на снижение подачи хлебной массы в комбайн. При увеличении потерь зерна (ПЗ), загрузки двигателя (ЧД) и МСУ (ЗМ) анализатором сочетаний генерируется сигнал на снижение скорости комбайна (СК). Таким образом, видно, что система нечётких экспертных высказываний адекватно описывает отношения «регулируемый параметр — входные факторы».
Выводы. Разработанная имитационная модель нечёткого адаптивного управления устанавливает соотношение между степенью загрузки двигателя, скоростью движения зерноуборочного комбайна и подачей хлебной массы в конкретных условиях уборки: влажность хлебной массы, урожайность убираемой культуры, рельеф поля и техническое состояние комбайна. Важной особенностью разработанной имитационной модели является непрерывное изменение возмущающих воздействий в диапазоне всех возможных значений, причём параметры моделирования задаются пользователем, что позволяет моделировать всевозможные ситуации работы комбайна и оценить качество выполнения ТП при различных внешних воздействиях. Созданные база знаний и механизм вывода решений составляют основу системы адаптивного управления зерноуборочным комбайном.
Список литературы Нечёткое адаптивное управление зерноуборочным комбайном
- Борисова, Л. В. Принятие решений по технической регулировке комбайна на основе нечёткого логического вывода/Л. В. Борисова//Вестник Дон. гос. техн. ун-та. -2007. -Т. 7, № 3 (34). -С. 292-298.
- Борисова, Л. В. Некоторые аспекты решения задачи по выбору значений регулируемых параметров комбайна на основе нечётких знаний/Л. В. Борисова, Н. М. Сербулова, А. В. Авилов//Вестник Дон. гос. техн. ун-та. -2009. -Т. 9, № 4 (43). -С. 691-696.
- Димитров, В. П. О формализации задачи технической регулировки комбайна/В. П. Димитров, Л. В. Борисова//Вестник Дон. гос. техн. ун-та. -2008. -Т. 8, № 2 (37). -С. 145-155.
- Тугенгольд, А. К. Корректировка технологических регулировок на основе нечёткого логического вывода/А. К. Тугенгольд, Л. В. Борисова, В. П. Димитров//Вестник Дон. гос. техн. ун‑та. -2009. -Т. 9, № 3 (42). -С. 419-426.
- Паршин, Д. Я. Многопараметрическая система адаптивного управления зерноуборочным комбайном/Д. Я. Паршин, Д. Г. Шевчук//Вестник Дон. гос. техн. ун-та. -2011. -Т. 11, № 10 (61). -С. 1817-1823.
- Шевчук, Д. Г. Зерноуборочный комбайн как объект автоматического управления//Состояние и перспективы развития сельскохозяйственного машиностроения: мат-лы междунар. науч.-практ. конф. 29 февраля -1 марта 2012 г. -Ростов-на-Дону, 2012. -С. 264-267.
- Леоненков, А. В. Нечёткое моделирование в среде MATLAB и fuzzyTECH. -Санкт-Петербург: БХВ-Петербург, 2005. -736 с.
- Штовба, С. Д. Проектирование нечётких систем средствами MATLAB. -Москва: Горячая линия -Телеком, 2007. -288 с.
- Нечёткое моделирование и управление: пер. с англ./А. Пегат. -Москва: БИНОМ. Лаборатория знаний, 2012. -798 с.
