Нейроуправление активными источниками для подавления акустических волн в заданной области

Автор: Кошур Владимир Дмитриевич, Фадеева Маргарита Сергеевна
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Математика, механика, информатика
Статья в выпуске: 3 (36), 2011 года.
Бесплатный доступ
Представлены результаты исследований по нейроуправлению параметрами активных акустических источников для снижения давления в заданной части расчетной области. Проведенные вычислительные эксперименты показали достаточную эффективность использования нейросетевого управления.
Численное моделирование, активное гашение звука, нейроуправление
Короткий адрес: https://sciup.org/148176612
IDR: 148176612 | УДК: 519.95
Management of active acoustic sources by means of a neural network for suppression of acoustic waves in the set area
Results of researches on neural management of parameters of active audio sources for pressure decrease in the set part of computation domain are presented. The computing experiments made have shown sufficient efficiency of usage of a neural network management.
Текст научной статьи Нейроуправление активными источниками для подавления акустических волн в заданной области
Шум является одним из неблагоприятных факторов окружающей среды. Для уменьшения шума применяются как пассивные средства (звукопоглощающие материалы), так и активные методы подавления шума, основанные на взаимодействии пассивных акустических волн и волн от активных источников, которые, например, генерируют соответствующие волны в противофазе.
Современные схемы активного гашения звука представляют собой достаточно сложные адаптивные системы [1–3], которые позволяют снижать интенсивность акустических полей в заданной области, уменьшать излучаемую звуковую энергию в целом и осуществлять адаптивное управление в зависимости от поставленных задач. Следует отметить перспективность нейросетевых методов управления активными акустическими источниками, которые после настройки и обучения управляющих нейросетевых блоков обладают высокой скоростью обработки информации и позволяют управлять снижением шума в режиме реального времени.
Численное моделирование распространения и взаимодействия акустических волн проводится на основе численной схемы С. К. Годунова [4] в двумерной постановке. Рассматривается прямоугольная область D (10 × 2,5 м), на границах области предполагается полное отражение акустических волн. Для расчета используется двумерная сетка элементов A j с параметрами h x = h y = 0,1 м; i = 1,2, …, 100; j = 1,2, … 25 (рис. 1).
акустического давления S определена в виде объединения ячеек S = U А i **** j , где i = 90, j = 1,2, .., 25.
В ячейках воздействия источников E, F1 и F2 генерируется акустическое давление в виде pE (A, v, t) = A sin(2nvt), pF (Bi, wi, t) = Bi sin(2nwi t). (1)
Здесь A и B i ( i = 1,2) – амплитуды звукового давления (для того чтобы в (1) не использовать фазовый сдвиг при изменении параметров амплитуд, предполагалось, что эти параметры могут принимать как положительные, так и отрицательные значения), v и w i ( i = 1,2) – частоты звукового давления.
Для контроля квадратичной величины звукового давления в области S рассматривается интегральная характеристика вида
Q ( B 1 , B 2 , W 1 , W 2 , t ) = JJ ( p ( x , y , t ) ) 2 dxdy . (2)
S
Общая интегральная оценка уровня квадратичной величины давления в зоне контроля S для заданного интервала времени [0, t *] определяется в следующей форме:
t y = J Q (B1, B 2, W1, W2, t) dt. (3)
Здесь t * соответствует времени двукратного пробега звуковой волны вдоль расчетной области.
Из соотношений (2) и (3) следует, что среднее звуковое давление в контрольной области S площадью ц(S) с учетом его изменения во времени можно оце- нить по выражению
D
E F 1
S
F 2
Рис. 1. Вид расчетной области D с выделенной подобластью S для контроля акустического давления и расположение пассивного источника E и двух активных источников F 1 и F 2
Пассивное акустическое воздействие рассматривается в ячейке Аi*j*, где i =5, j = 5. Источники F 1 и F2, управляемые нейронной сетью, активные, располагаются в ячейках Аi**j**, i = 5, j = 6 и Аi***,***, i = 1, j*** = 12 соответственно. Выбор места расположения этих акустических источников для снижения уровня давления в области S исследован в [5]. Зона контроля pcp
Y
^*
T ц ( S )
.
Нейросетевое управление параметрами давления активных источников F 1 и F 2 осуществляется на основе инверсной модели объекта управления [6] (рис. 2). Представлены прямая (рис. 2, а ) и инверсная (рис. 2, б ) модели объекта управления.
Архитектура нейронной сети выбрана в виде обобщенной регрессионной сети [7], обладающей высокой скоростью обучения. Объект управления представляет собой двумерную акустическую модель, которой соответствует протестированный вычислительный модуль [8], разработанный на основе схемы С. К. Годунова для моделирования нестационарного распределения акустического давления p ( x , y , t ) в расчетной области D в зависимости от варьируемых параметров A , v , B i , w i .
pE
p
p
Объект управления
QQ pE
Нейронная сеть
p
F 1
pF2
а б
Рис. 2. Модели объекта управления: а – прямая; б – инверсная
После включения блока управления на вход нейронной сети подаются изменяющаяся величина давления в пассивном источнике и нулевые значения для контролируемого параметра Q , так как это соответствует для данной модели инверсного управления максимальному снижению давления в контролируемой зоне S .
Исследование аналогичной схемы управления для одного активного источника было рассмотрено в [9]. Выходом нейронной сети является значение давлений двух акустических источников в текущий момент времени t :
T = ( pF, pF2)
Входной вектор имеет вид:
P(R) = [pt-4At, pt-3At, pt-2At, pt-At, ET pt , Qt-4At, Qt-3At, Qt-2At, Qt-At, Qt J , где ptE4T,..., pE являются значениями пассивного источника в пять моментов времени с запаздыванием относительно текущего времени; Qt-4т, ..., Qt представляют пять соответствующих значений квадратичной величины давления в зоне контроля S; At - время запаздывания – соответствует каждому численному шагу по времени (At = 131); R - размер входных данных для нейронной сети (R = 10).
Обучение нейронной сети производится на предварительно сформированных данных: входных векторах P и соответствующих им выходных значениях T . Формирование набора данных осуществляется перебором параметров A , B i , v , w i , которые по формуле (1) определяют значения давлений пассивного и активных источников, где амплитуды A и B 1 изменяются в диапазоне [–15 Па, 15 Па] с интервалом 10 Па, амплитуда B 2 – в диапазоне [–5 Па, 5 Па] с интервалом 2,5 Па, а частоты v , w 1 и w 2 – в диапазоне [70 Гц, 130 Гц] с интервалом 30 Гц. При этом проводится численное решение по двумерной акустической модели и вычисляются значения контролируемой величины Q ( B 1 , B 2 , w 1 , w 2 , t ) по формуле (2).
Настройка нейронной сети осуществляется подбором параметра spread [10]. Чем больше значение этого параметра, тем большее число нейронов участвует в формировании среднего значения, и наоборот. Установлено в вычислительных экспериментах, что для данной модели наиболее эффективным является значение этого параметра, равное 0,1.
Проведенные вычислительные эксперименты позволяют сравнить результаты нейросетевого управления параметрами двух активных источников с результатами прямой минимизации акустического давления в контролируемой области S на основе гибридного генетического алгоритма [5].
Изменение давления пассивного источника E в виде pE ( A, v , t ) = 10sin(2 n 100 1 ) не входит в обучающую выборку для нейронной сети, поэтому эффективные значения изменений активных источников определяются нейронной сетью аппроксимационно (при предполагаемых нулевых значениях параметра Q (2)). В результате расчетов получены значения численной оценки V = 1,279 1 и среднего давления в контролируемой подобласти p ср = 0,010 7 Па.
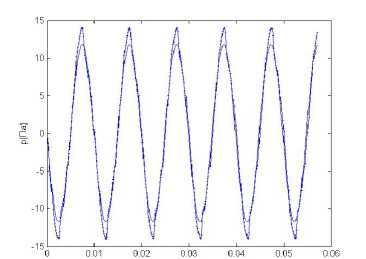
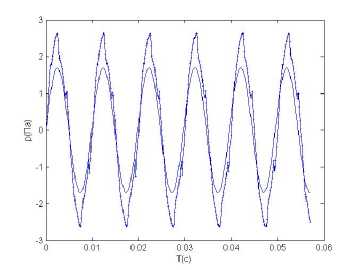
С помощью вычислительного эксперимента по минимизации акустического давления в части заданной области с помощью гибридного генетического алгоритма при описанной выше функции распространения давления пассивного источника установлено, что оптимальными параметрами активных источников для минимизации звукового давления в определенной зоне области являются значения: B 1 = –11,76 Па, w 1 = 100,43 Гц, B 2 = 1,69 Па, w 2 = 101,01 Гц. При этих параметрах значение численной оценки V = 0,23, а среднее давление в зоне контроля p ср = 0,004 6 Па. Графики изменения давления в активных источниках F 1 ( а ) и F 2 ( б ) при минимизации и вариант при нейроуправлении этими источниками представлены на рис. 3.
Для сравнения с результатами при отсутствии активных источников F 1 и F 2 : оценка уровня давления в контролируемой подобласти составляет V = 760,48, а p ср = 0,261 7 Па.
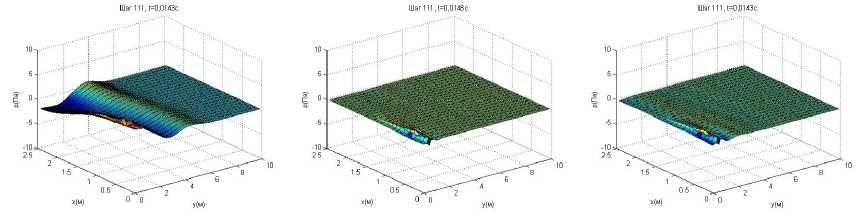
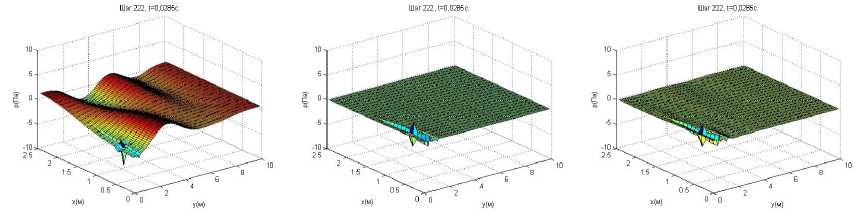
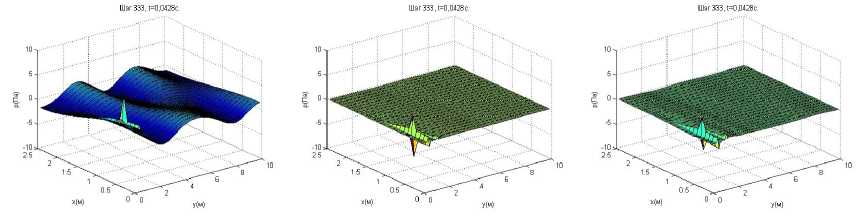
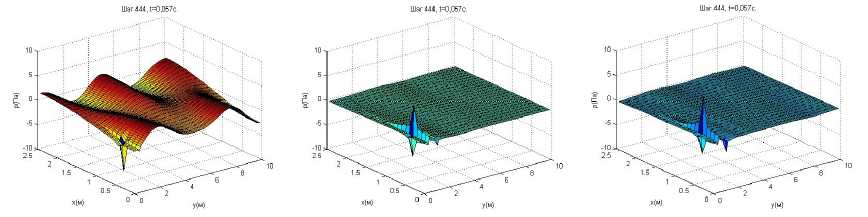
Для наглядного представления различий распределения давления в двумерной расчетной области D на рис. 4–7 в характерные моменты времени ( t */4, t */2, 3 t */4, t *) приведены поверхности распределения давлений для трех вариантов расчетов: а ) – показана поверхность изменения давления при отсутствии активных источников; б ) представлена поверхность давления при действии активных источников с оптимальными параметрами, полученными из решения задачи минимизации звукового давления в зоне контроля на основе гибридного генетического алгоритма; в ) представлена поверхность давления при действии активных источников, которые управляются нейросетевым блоком в режиме реального времени.
ты
б
Рис. 3. Графики сравнения изменения давления в двух активных источниках при прямой минимизации на основе гибридного генетического алгоритма и при нейроуправлении:
а – источник F 1 ; б – источник F 2
а
а б
в
Рис. 4. Поверхности звукового давления в момент времени t */4 для трех вариантов расчетов
а б в
Рис. 5. Поверхности звукового давления в момент времени t */2 для трех вариантов расчетов
а б
в
Рис. 6. Поверхности звукового давления в момент времени 3 t */4 для трех вариантов расчетов
а б в
Рис. 7. Поверхности звукового давления в момент времени t * для трех вариантов расчетов
Результаты расчетов показывают, что уровень акустического давления в зоне контроля S , достигнутый при прямой минимизации давления с помощью гибридного генетического алгоритма, ниже, чем уровень звукового давления в зоне контроля S для варианта нейроуправления активными источниками. Если оценивать по среднему давлению p ср, снижение звукового давления в зоне контроля S в первом случае в 57 раз, а во втором – в 24 раза.
Следует отметить, что значительно большее снижение давления в контрольной области при прямой минимизации акустического давления по параметрам активных источников достигнуто для конкретного вида изменения давления пассивного источника. Использование же нейросетевого управления хотя и не обеспечивает столь значительных результатов, но при этом дает возможность понизить акустическое давление в контрольной области и для других форм изменения давления в пассивном источнике, а также проводить процесс управления в режиме реального времени.
Итак, результаты вычислительных экспериментов по применению нейросетевого блока управления двух акустических источников, основанного на инверсной модели объекта управления с учетом граничных условий (полное отражение волн от границ области) свидетельствуют о возможности значительного подавления акустического давления в зоне контроля. Примененная схема управления позволяет рассматривать адаптивный процесс управления при изменяющейся форме давления пассивного источника, а также при электронной реализации нейросетевого блока управления проводить управление в режиме реального времени.
