Некоторые подходы к обработке и интерпретации данных скважинных сейсмических наблюдений и результаты их применений

Автор: Бляс Э.А., Шавина Л.И.
Журнал: Вестник Мурманского государственного технического университета @vestnik-mstu
Статья в выпуске: 2 т.1, 1998 года.
Бесплатный доступ
В работе рассматривается общий подход к обработке и интерпретации данных скважинных сейсмических наблюдений. Предлагается обработку выполнять в четыре этапа, на каждом из которых решается свой класс задач. Подробно рассматривается одна из задач - выделение регулярных волн по трехкомпонентным наблюдениям. Для решения данной задачи предложен оптимизационный метод, на каждом шаге которого уточняется форма и амплитуды одной волны. Оптимизация выполняется методом сопряженных градиентов, при этом неизвестными являются только временные задержки, а амплитуды и форма волны находятся при решении задачи на собственные числа и вектора симметричной матрицы. Приведены примеры работы программ на данных ВСП в Северном Самотлоре. Применение данного подхода позволило получить глубинные разрезы с частотами до 170Гц и спрогнозировать свойства продуктивных слоев в околоскважинном пространстве.
Короткий адрес: https://sciup.org/14293265
IDR: 14293265
Текст научной статьи Некоторые подходы к обработке и интерпретации данных скважинных сейсмических наблюдений и результаты их применений
Обpаботка и интеpпpетация данных скважинных наблюдений выполняется на этапе детальных pабот по уточнению стpоения пpодуктивных слоев в окpестности скважины. На этой стадии pабот известна апpиоpная (приближенная) модель сpеды в скважине, и требуется уточнить свойства pазpеза в непосpедственной близости от скважины – увязать акустическую модель разреза с волновым полем пpодольного ВСП (вертикальное сейсмическое профилирование), а затем pаспpостpанить эту модель на околоскважинное пpостpанство по скважинным наблюдениям с выносных пунктов возбуждений (в моpских условиях это могут быть многоуpовенные скважинные наблюдения – СОГ). Это позволяет получать детальную информацию о строении продуктивных слоев, латеральном изменении их свойств в окрестности скважины радиусом порядка 0,3 глубины залегания отражающих границ.
Для pешения задачи детального изучения околоскважинного пpостpанства пpедлагается следующий подход к обpаботке и интеpпpетации данных скважинных сейсмических наблюдений. Изучение строения pазpеза околоскважинного пространства пpоводится в четыpе этапа, на каждом из котоpых pешается свой кpуг задач.
На пеpвом этапе по данным ГИС и пpодольному полю ВСП стpоится детальная одномеpная модель pазpеза. Сначала по данным ГИС и АК получаем тонкослоистую акустическую модель, для котоpой pассчитывается волновое поле отpаженных волн пpодольного ВСП. Как показывает пpактика, теоpетическое волновое поле отраженных волн не согласуется с полем, полученным из пpодольного ВСП. Эти отличия вызываются многими пpичинами. Не вдаваясь в подpобное обсуждение этих пpичин, отметим только, что кpоме погpешностей собственно методов ГИС и АК, отличие теоpетического и pеального полей вызывается тем, что поле сейсмических волн фоpмиpуется областью сpеды pадиуса от десятков метpов до нескольких сотен (в зависимости от глубины залегания и пpеобладающих частот), в то вpемя как pадиус исследования ГИС и АК составляет несколько метpов. Фактически для постpоения модели pазpеза, согласованной с волновым полем пpодольного ВСП (т.е. в сейсмическом диапазоне частот), необходимо на первом этапе обработки pешить обpатную динамическую задачу. На этом же этапе выполняется разделение исходного поля продольного ВСП на падающие и отраженные волны, оптимальная деконволюция поля отраженных волн и высокоточная привязка отражений.
Для решения задач первого этапа разработаны методы определения одномерной тонкослоистой модели, основанные на решении обратной одномерной динамической задачи. Задача изучения акустических свойств разреза по данным продольного ВСП (с ближнего пункта возбуждений) разбивается на два шага. На первом шаге определяются параметры среды во вскрытой части скважины путем решения одномерной обратной динамической задачи, сводящейся к минимизации целевой функции, связывающей спектры наблюдаемых колебаний и параметры разреза. Методы основаны на нелинейной оптимизации в спектральной области, при этом учитывается влияние промежуточных границ на базе определения модели. При определении детальной модели среды выполняется разделение полного поля на восходящие и нисходящие волны. Поле отраженных волн фильтруется по форме нисходящих волн, что позволяет добиться высокой разрешенности поля восходящих волн, выполнить точную привязку отражений к границам слоев. Результаты привязки и уточнения акустических параметров среды проверяются при помощи программ моделирования волновых полей. На втором шаге, используя поля падающих и восходящих волн, полученные в результате разделения наблюдаемого волнового поля на нисходящие и восходящие волны, решается задача прогнозирования акустических и поглощающих свойств разреза ниже забоя скважины. Решение данной задачи также сводится к минимизации целевой функции, связывающей в спектральной области спектры выделенных волн и параметры разреза. Более подробно обе задачи первого этапа рассмотрены в работе ( Бляс, Середа , 1998).
На втоpом этапе уточняется толстослоистая скоpостная модель околоскважинного пpостpанства по данным скважинных наблюдений (СОГ или с выносного пункта), т.е. фактически pешается обpатная кинематическая задача. Здесь необходимо отметить пpинципиальное pазличие в получении изобpажений (вpеменных или глубинных pазpезов) в методе ОГТ и по скважинным наблюдениям. Если в методе ОГТ знание скоpостной модели сpеды не тpебуется, а достаточно пpовести скоpостной анализ, то для получения pазpезов ВСП-ОГТ необходимо задать модель сpеды, так как необходимо учитывать мигpацию точки отpажения пpи изменении глубины отpажающей гpаницы. Пpи скважинных наблюдениях даже небольшие погpешности в скоpостной модели пpиводят к существенным искажениям суммаpных pазpезов, поэтому для получения изобpажений с минимальными искажениями необходимо пpедваpительно pешать обpатную кинематическую задачу - опpеделять пластовые скоpости и отpажающие гpаницы по годогpафам отpаженных и пpоходящих волн.
Решение задачи постpоения скоpостной модели pазpеза pазбивается на тpи шага: выделение регулярных волн и опpеделение их кинематических хаpактеpистик, постpоение скоpостной модели и пpовеpка pезультатов уточнения скоростных параметров разреза путем сравнения реальных и рассчитанных времен прихода волн. Особенностью решения обратных кинематических задач при скважинных сейсмических наблюдениях является возможность (и необходимость) использования различных типов волн: восходящих и нисходящих, монотипных и обменных.
Для решения задач второго этапа разработаны алгоритмы и программы решения обратных кинематических задач в трехмерных средах с несогласными границами и неоднородными слоями. Они позволяют определять толстослоистые модели околоскважинного пространства по волнам различных типов, как восходящим, так и нисходящим. При определении скоростей и границ разреза учитывается преломление лучей, в том числе и пространственный снос в трехмерных латерально-неоднородных средах. Уточнение модели выполняется оптимизационным методом из условия минимизации различий реальных и теоретических времен выделенных регулярных волн ( Бляс , 1998).
На тpетьем этапе выполняется вычитание pегуляpных помех, пpежде всего нисходящих волн на сейсмогpаммах ВСП, а также низкоскоpостных волн на сейсмогpаммах СОГ. После этого выполняется пpеобpазование волновых полей во вpеменные или глубинные изобpажения сpеды в околоскважинном пpостpанстве c использованием полученной скоpостной модели. Вид изобpажений зависит от схемы наблюдений, в пpинципе (при соответствующих расположениях пунктов возбуждения) можно получать тpехмеpные кубы, а затем из них выбиpать те или иные сечения.
Для решения задач третьего этапа разработаны программы получения трехмерных (или двумерных, в зависимости от схемы наблюдений) временных и глубинных изображений околоскважинного пространства с учетом преломления лучей на промежуточных границах слоев. На вход данной процедуры подается скоростная модель, полученная при решении обратной кинематической задачи на предыдущем этапе. Для данной модели рассчитываются поправки ВСП-ОГТ с учетом преломления лучей и их пространственного сноса. Перед выполнением преобразования волновых полей
ВСП с выносных пунктов необходимо выделить отраженные волны. Для решения данной задачи разработаны алгоритмы и программы разделения полей с учетом выноса пунктов возбуждения, который приводит к непараллельности годографов волн, отраженных от различных границ.
На четвеpтом этапе выполняется пpогнозиpование детальной акустической модели, полученной по данным ГИС и волновому полю пpодольного ВСП, в околоскважинное пpостpанство по вpеменным pазpезам ВСП-ОГТ. Это позволяет спрогнозировать свойства продуктивных слоев, проверить геологические гипотезы о латеральных изменениях свойств залежи.
Для решения задач последнего этапа разработаны программы прогноза тонкослоистой модели в околоскважинное пространство по временным разрезам, полученным на предыдущем этапе. В качестве модели в скважине берется модель, полученная на первом этапе. Для уточнения акустических параметров используется метод оптимизации – автоматический подбор модели из условия максимальной близости реальных и теоретических разрезов, при этом имеется возможность учета кратных волн, образующихся на сильных границах слоев.
-
2. Выделение регулярных волн по трехкомпонентным скважинным сейсмическим наблюдениям
Одной из основных задач скважинной сейсморазведки является изучение геологического строения околоскважинного пространства по характеристикам отраженных волн. Трехкомпонентная регистрация сейсмических волновых полей в скважине позволяет при выделении регулярных волн использовать не только их кинематические различия и различия формы сигналов, но и отличие в поляризации. В работах С.А.Нахамкина, Ф.М.Гольцмана, В.Н.Трояна разработаны алгоритмы выделения регулярных волн на фоне помех, которые основаны на поочередном вычитании волн-помех. Эти алгоритмы можно обобщить на трехкомпонентные наблюдения, но они не являются оптимальными.
Кратко действие этих алгоритмов можно описать следующим образом. Сначала предполагается, что на сейсмограмме зарегистрирована одна (наиболее сильная) регулярная волна, остальные колебания считаются помехами. Неизвестными величинами являются параметры данной волны (вектор амплитуд, форма волны и временные подвижки на различных трассах), нахождение которых фактически сводится к проектированию трехкомпонентной сейсмограммы на различные направления (то есть перебору направлений поляризации) и суммированию трасс с различными задержками (которые при наблюдениях ВСП линейно зависят от некоторого параметра). Суммарная трасса выбирается так, чтобы ее энергия (при переборе задержек) была максимальной. В дальнейших модификациях вычисляется коэффициент корреляции суммарной трассы с исходными, и последние вновь суммируются с весами, роль которых играют найденные коэффициенты корреляции.
Здесь можно отметить, что на трехкомпонентных наблюдениях различные волны (продольные и поперечные) имеют различную поляризацию, поэтому выбор направления поляризации выделяемой волны позволяет существенно ослабить регулярные волны другого типа. Заметим, что после проектирования на оптимальное для данной волны направление фактически получается задача выделения волны по однокомпонентной сейсмограмме, поэтому при рассмотрении выделения регулярной волны можно ограничиться однокомпонентным волновым полем.
Далее, найденная волна вычитается из сейсмограммы, после чего предполагается, что остаточная сейсмограмма снова содержит одну регулярную волну и нерегулярные помехи. Для вычитания находятся подвижки между волной (которая представляет собой сумму трасс сейсмограммы с подвижками и весами) и каждой трассой, а также коэффициенты корреляции, которые служат весами при вычитании этой волны из каждой трассы. По остаточной сейсмограмме снова выполняется та же процедура выделения одной (второй) волны. Найденная вторая волна, также вычитается из остаточной сейсмограммы. После этого, выделенная первая волна подсуммируется к остатку, полученному после вычитания обеих ранее найденных волн. Полученная таким образом сейсмограмма содержит первую (наиболее сильную) волну и остаточные колебания. Если бы две найденные волны определялись точно, то к остаточной сейсмограмме (после вычитания этих двух волн) можно было бы применить описанную процедуру. Но, так как первая волна находилась в предположении, что других регулярных волн нет (на самом деле сейсмограмма представляет собой интерференцию нескольких регулярных волн и случайного шума), то ее параметры определялись неточно. Отсюда следует, что после вычитания первой волны параметры второй также определялись неточно, поэтому требуется уточнение обеих выделенных волн. После подсуммирования первой волны к остаточной сейсмограмме, полученное волновое поле содержит первую волну, остатки второй, остальные регулярные волны (если они имеются) и нерегулярный шум. Так как вторая волна ранее вычиталась (пусть даже неточно), то на получившейся сейсмограмме ее уровень меньше, чем на исходной, поэтому первая волна должна выделиться лучше, чем на исходной сейсмограмме. Исходя из этого, предыдущая процедура повторяется до тех пор, пока параметры выделяемых двух волн не стабилизируются. Далее, после вычитания двух найденных волн, определяется третья (самая сильная из оставшихся) волна и т.д.
Данный подход нашел широкое применение при разделении волновых полей ВСП, на которых регистрируются четыре основные волны: падающие продольная и поперечная и отраженные продольная и поперечная. Довольно сильное различие их кинематических характеристик (по крайней мере, при не очень больших удалениях источника от скважины) делает данный алгоритм достаточно эффективным. В то же время, при решении тонких задач по детальному изучению строения околоскважинного пространства, желательно выделять полезные волны с минимальными погрешностями.
Численные расчеты на моделях показали, что после нескольких (трех - пяти) итераций форма выделяемых волн стабилизируется, но при этом остатки (разность между исходной сейсмограммой и выделенными волнами) не стремятся к нулю, то есть алгоритм не сходится к точке минимума. Ниже мы дадим математическое описание этого алгоритма, откуда будет ясно, почему он не сходится к оптимальному значению, то есть не минимизирует остатки. В данной работе рассматривается новый алгоритм, который позволяет сделать остатки сколь угодно малыми.
Будем рассматривать следующую математическую модель, описывающую экспериментальные данные, находящую широкое применение в алгоритмах выделения регулярных волн на фоне помех:
R j ( t j ) = a di fd ( t j - T di ) + a ui f, ( t j + T ui ) + b di g d ( t j - 9 di ) + bui g u ( t j + 9 u, ) + £ j i=1,2,...,n. (1)
Здесь R i ( t ) = ( R xi ( t ), R yi ( t ), R zi ( t )) - трехкомпонентная сейсмограмма, зарегистрированная в i -ом приемнике во времена t = t j , j =1,2,..., M ; a di , a ui - векторные амплитуды соответственно падающей и отраженной продольных волн, b di , b ui - амплитуды поперечных волн, Tdi , Tui - времена падающей и отраженной продольных волн, 9di , 9ui - времена поперечных нисходящей и восходящей волн, fdi ( t ), fui ( t ), gdi ( t ), gui ( t ) -форма поперечных и продольных волн, ^ j - нерегулярная помеха, описываемая случайной нормально распределенной слабо коррелированной величиной. Для определения неизвестных амплитуд, временных задержек и сигналов применяется метод максимального правдоподобия, который для рассматриваемой модели сейсмограммы и предполагаемых свойствах помех сводится к нахождению минимума функционала Ф‘, определяемого равенством
Ф ‘ = Е Е | R i ( t j ) - a di f d ( t j - T di ) - a„ L ( t j + t ,, ) - b di g d ( t j - 9 di ) - b ,i g , ( t j + 9 „ ) |12 (2)
j=1 i=1
Здесь неизвестными являются векторные амплитуды adi, aui, bdi, bui, времена Tdi, Tui, 9di, 9ui и форма волн fd(t), fu(t), gd(t), gu(t), ||ai|| означает длину вектора ai. При нахождения минимума этой функции будем поочередно фиксировать параметры всех волн, кроме одной. При минимизации по параметрам одной волны будем также фиксировать поочередно кинематические параметры (времена T, 9) и динамические: амплитуды и форму уточняемой волны.
На каждом шаге фиксируются параметры всех волн, кроме уточняемой. Предположим для определенности, что уточняется падающая продольная волна f d ( t-Tdi ). В дальнейшем для сокращения записи будем индекс d опускать. Пусть R j ‘ ( t j ) - разность между исходным полем и суммой всех волн, кроме уточняемой, т.е.:
R , ‘ ( t j ) = R , ( t j ) - a ,, f ,( t j + T „ ) - b di g d ( t j - 9 di ) - b ui g u ( t j + 9 ,, ), i= 1,2 ,...,n ; j= 1,2 ,...,M. (3)
Тогда определение параметров уточняемой волны сводится к минимизации функции
M n
Ф = Е Е | R j ( t j ) - a i ftj - t , ) || 2 j=1 i=1
Требуется найти значения вектора a i , времен t , и функции f(t j ) по известным R j ‘ ( t j ). Сначала приближенно найдем времена T с помощью функции автокорреляции по исходным трассам и зафиксируем их. Тогда задача состоит в определении координат векторов a i и функции f ( t j ) из условия минимума функции Ф .
Прежде чем решать данную задачу, преобразуем функцию Ф аналогично ( Быков , 1981). Для этого введем в трассы i -го канала временные сдвиги т , , то есть каждую трассу сейсмограммы сдвинем на соответствующее время. Можно считать, что временное окно, в котором находится функция Ф таково, что сдвиги трасс не выводят их из этого окна. Тогда для функции Ф получаем следующее представление
M n
Ф = Е Е HR j (.t j + т ) - a i ft j ) || 2. (4)
j=1 i=1
Задача состоит в нахождении координат axi векторов ai и функции f(t), i =1,2,...,n. Сначала зафиксируем координаты векторов ai, тогда в правой части равенства (4) каждое из трех слагаемых, соответствующих координатам x, у и z, зависит только от одного отсчета сигнала f(t), а именно, от fj = f(tj). Отсюда и из условия минимума функции следует, что, f удовлетворяет уравнению дФ‘/df = 0, которое, как следует из (4), имеет вид дФ/дfj = E (R,\tj + т) - at f(tj)) aif(tj) = 0 , j =1,2,...,M.
i=1
Из данного равенства сразу получаем, что n
f(tj) = [E Ri‘(tj + Ti)ai] /E\\ak||2.(6)
i=1i=1
Таким образом, для каждого набора векторов a k , k =1,2,..., M равенство (6) позволяет найти функцию f ( t ), для которой Ф достигает минимума. Учитывая это, преобразуем правую часть равенства (4). Раскрывая квадрат нормы вектора, получим
M n M n M n Mn
Ф = E E \\ Ri‘(t+ т) - ai ftt) \\2 = E E ||Ri‘(t+ Ti) \\2 - 2 Ef(t) E Ri‘(t+ т)ai + E/(t)E ||ai t i t i t i ti
Заменяя в последнем равенстве функцию f ( t ) на правую часть формулы (6), получим
M n M n nn
Ф=EE\\Ri-‘(t+т)\\2 -2E {[ERi‘(t+т)ak] /E\\ak\\2}ERi‘(t+т)ai + t i M n t k n k ni
+ E{[ERi'(t+т)ak] /E\\ak\\2}2 E ||aiH2'(7)
Используя равенство n nin
[ERi‘(t+т)ak]2 = [ERi‘(t+т)ak] [ERi(t)ai-] k ki
n и учитывая, что E||ak||2 не зависит от t, получим, что k пт n n n n nn
E {[E Rk(t)ak] /E\\ak\\2}ERi(t)ai- = E {[E Rk(t)ak] /E\\ak\\2}2 E \\ai \\2. t k k i t k ki
Отсюда следует, что в правой части равенства (7) последние два слагаемых представляют собой подобные члены, после приведения которых и изменения порядка суммирования формула (6) принимает вид M nM n
Ф = EE \\Ri(t)\\2 - [EEakiakai] /(E\\ak\\2), t i t k ik
M где aik = E Rk(t) Ri(t) - элементы матрицы А. Так как первое слагаемое не зависит от векторов ak, t то минимум функции Ф достигается при тех же ak, что и максимум величины n nn
F ( a i , a 2 , ... a n ) = [ E E a ki- a k a i ] / ( E \\ a k \\ 2 ) .
i kk
Введем в рассмотрение новый вектор b , координатами которого являются координаты векторов a 1 , a2 , ... a n :
b1 = a1x , b2 = a1y , b3 = a1y , b4 = a2x , b5 = a1y , ... , b3n = anz
Кроме этого, рассмотрим вектор U , координаты которого соответствуют координатам вектора b и определяются равенствами
U1 = Rx1 , U2 = Ry1 , U3 = Rz1 , U4 = Rx2 , ... , U1 =R
В этих обозначениях равенство (8) запишется в виде n nn
F(bi, b2,... Ьзп) = [E Eeki bkbi] /(E\bk\\2),(9)
i kk где eki — элементы матрицы В, определенные равенствами
M
ви = S Uk(t) U(t).
t
Нахождение максимума функции F(b1, b2, ... b3n) равносильно нахождению координат собственного вектора матрицы В, соответствующего максимальному собственному числу. Для решения данной задачи разработаны численные методы и стандартные программы.
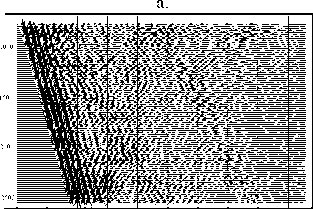
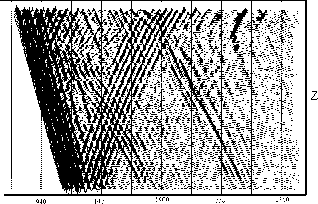
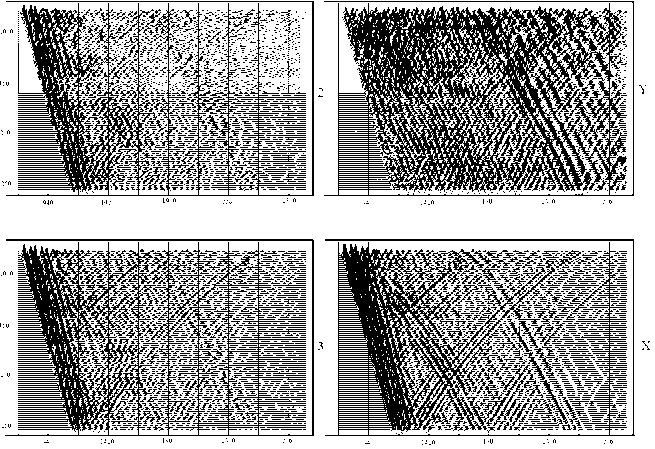
Рис.1.
Таким образом, нахождение амплитуд регулярной волны свелось к нахождению собственных чисел и векторов матрицы, элементы которой представляют собой сумму попарных произведений проекций наблюдаемых колебаний в различных точках приема. Размерность матрицы равна числу приемников на базе разделения. После нахождения вектора амплитуд определяем форму сигнала как линейную комбинацию трасс с найденными координатами. Форма уточняемой волны определяется равенством (6).
После определения сигнала уточняются времена таким образом, чтобы функция достигала минимума и т.д. При нахождения времен задача разбивается на независимые задачи минимизации функции одной переменной (минимизация слагаемых, относящихся к одной точке приема), которая решается методом золотого сечения с предварительным оцениванием интервала. Фиксация части переменных позволяет существенно сократить время вычислений. Отметим, что данный подход, основанный на минимизации квадратичных невязок теоретического и реального волновых полей, также сводится к поочередному уточнению текущей волны, которое можно трактовать как вычитание ранее найденной волны и прибавление уточняемой. Вычитая волну, найденную на предыдущем шаге, мы ее вводим в величину Ri‘(tj), определенную равенством (3), а прибавляя к остаточному полю новую волну (которая будет уточняться), мы приходим к модели (4). Отличие состоит в том, что форма сигнала находится с оптимальными амплитудами, и минимизация проводится сразу по всем задержкам.
Это позволяет получать оптимальные (в смысле метода максимального правдоподобия) оценки параметров регулярных волн в рамках рассматриваемой модели волнового поля. Кроме того, данный подход может быть обобщен для учета нелинейной поляризации регулярных волн, но этот вопрос выходит за рамки настоящей работы.
Так как на каждом шаге определяются параметры, минимизирующие функцию при фиксированных значениях других параметров, то данный алгоритм сходится при положительной определенности матрицы Гессе. Сходимость достигается за счет оптимального нахождения весов суммирования трасс при определении сигнала.
-
3. Применение разработанного подхода к обработке и интерпретации данных ВСП
Рис.2.
Это математическое обеспечение применялось для обработки и интерпретации данных ВСП в скважинах Баренцева моря, Карского моря, о. Колгуев, Западной Сибири, полученных с использованием скважинной сейсмической аппаратуры “Зонд-Д1” и пневматических источников “Пульс-1а”, разработанных в НИИ Моргеофизика. Его применение позволило решить ряд важных геологических задач: спрогнозировать лито-фациальное замещение в продуктивных слоях в околоскважинном пространстве, уточнить свойства тонких (порядка 5 - 10 м) слоев, изучить детальные поглощающие свойства разреза – определить коэффициент поглощения в слоях мощностью 10 - 15 м. Последующее бурение на о. Колгуев подтвердило правильность прогноза свойств продуктивных слоев.
В качестве примера рассмотрим некоторые результаты, полученные на одном из месторождений Северного Самотлора в Западной Сибири. Задача состояла в изучении строения продуктивных пластов в околоскважинном пространстве по наблюдениям с выносных ПВ. Сначала обрабатывалось и интерпретировалось волновое поле продольного ВСП (удаление от скважины 90 м). После решения обратной динамической задачи методом, описанным ниже, получена скоростная модель среды, которая хорошо согласуется с моделью, построенной по данным АК и ГИС.
Далее выполнялась обработка выносных ПВ по описанной выше методике. На рис.1 показано исходное волновое поле, полученное с ПВ, удаленном на 1200 м от скважины - компоненты 1, 2, 3, зарегистрированные трехкомпонентным двухточечным зондом (а), и компоненты X, Y, Z, полученные после поворота зонда (б). К компонентам X, Y, Z применялась предсказывающая деконволюция, после чего были выделены нисходящие и восходящие продольные и поперечные волны, показанные на рис.2.
По выделенным годографам отраженных волн уточнялась скоростная модель среды, которая затем использовалась для получения глубинных разрезов. При интерпретации разрезов ВСП-ОГТ в первую очередь учитывались кинематические и динамические характеристики отражающих горизонтов, сформировавшихся от объектов исследования, их латеральная устойчивость или изменчивость.
Для прогноза литологических изменений в околоскважинном пространстве использовалась априорная геолого-геофизическая информация по Самотлорскому месторождению, материалы ГИС, результаты испытаний, керновые данные по соседним скважинам, предоставленные заказчиком.
Стратиграфическая привязка отражающих горизонтов на разрезах ВСП ОГТ осуществлялась путем сопоставления разрезов, построенных с выносных пунктов возбуждения, с разрезом по ближнему ПВ с привлечением оцифрованных кривых ГИС.
На рис.3 представлены разрез ВСП-ОГТ по удаленному ПВ (вынос 1100 м) с разрезом по ближнему ПВ1 и кривыми КС и ПС. Отмечается хорошая сопоставимость волновых полей на разрезах ВСП-ОГТ с разрезом по ближнему ПВ1. Кровля и подошва продуктивных пластов, их внутренние литологические неоднородности, граница водонефтяного контакта, выделенные по ПВ1, прослеживаются на разрезах с выносных ПВ. Высокочастотная обработка материалов с удаленных ПВ позволила в волновом поле ВСП проследить отражения с частотой до 170 Гц и, вследствие этого, разделить пласты мощностью до 5 - 10 м.
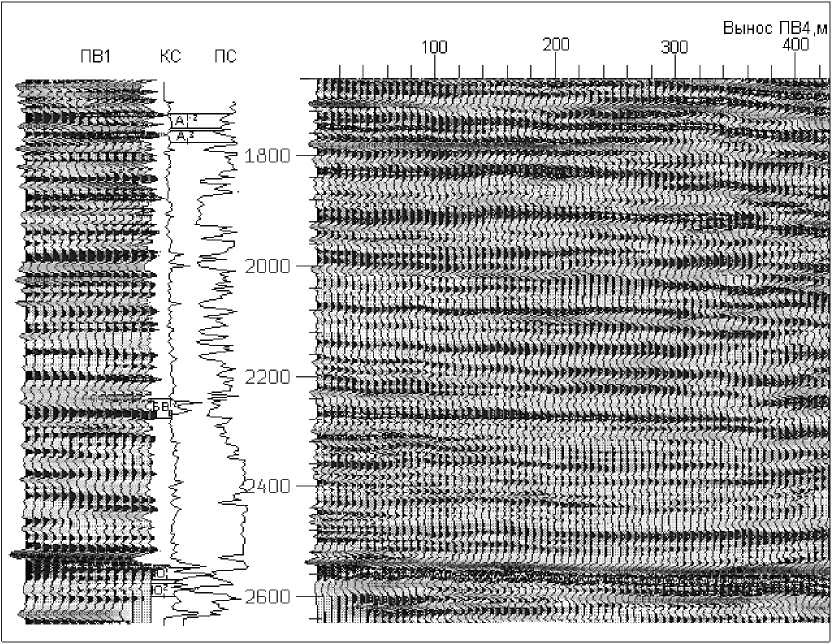
Рис.3.
По глубинным разрезам, полученным на Северном Самотлоре, были спрогнозированы изменения физических свойств продуктивных пластов, которые нашли подтверждение при последующем бурении.
