Нелинейное комбинированное управление в системе импульсной фазовой автоподстройки частоты

Автор: Зайцев А.А.
Журнал: Труды Московского физико-технического института @trudy-mipt
Рубрика: Радиотехника, радиофизика, прикладная физика
Статья в выпуске: 2 т.1, 2009 года.
Бесплатный доступ
Короткий адрес: https://sciup.org/142185589
IDR: 142185589
Текст статьи Нелинейное комбинированное управление в системе импульсной фазовой автоподстройки частоты
В современных системах техники связи и радиоавтоматики в качестве устройств частотно-фазовой синхронизации сигналов широкое распространение получили системы, использующие принцип импульсной фазовой автоподстройки частоты (ФАПЧ). Теория проектирования и анализа таких систем широко изучается в соответствующей литературе. Однако ввиду разнообразия условий применения в каждом конкретном случае решение инженерных вопросов построения элементов системы, обеспечивающих высокое качество протекания динамических процессов, при одновременно высоких показателях в отношении точности, требует индивидуального подхода и по-прежнему остаётся актуальным.
Одним из способов обеспечения высокого быстродействия является увеличение ширины полосы пропускания системы, которое, конечно же, приводит к ускорению переходной характеристики, но при этом не подавляются в необходимой степени шумы, вызванные импульсным управлением. Следующий способ — это увеличение коэффициента передачи разомкнутого контура. Предел этому накладывает увеличивающаяся колебательность переходного процесса. В этой связи широко применяются методы нелинейной коррекции в контуре управления. В начале переходного процес- са при большом рассогласовании управление системой осуществляется только исходя из условия обеспечения высокого быстродействия, а затем, когда рассогласование снижено до достаточно малой величины, управление изменяется в соответствии с требованиями к приемлемому окончанию и в целом к устойчивости переходного процесса. Реализовано это может быть с помощью элемента со специальной статической характеристикой, при которой управляющее воздействие выражается в виде нелинейной функции от ошибки регулирования [1].
В статье рассматривается структурная схема системы импульсной ФАПЧ, имеющей в составе контура обратной связи петлевой фильтр, реализованный в аналоговом виде, и нелинейное корректирующее устройство. Данная система предназначена для управления генератором, управляемым напряжением, с целью синтеза сигнала частотой 480 МГц при значении опорной частоты 12 МГц. Генератор изготовлен по технологии КМОП 0 , 18 мкм и имеет нелинейную вольт-частотную характеристику. Соответственно параметры всех элементов разрабатываемой схемы должны обеспечивать возможность её интегральной реализации по той же технологии.
Типовая структурная схема системы импульсной ФАПЧ представлена на рис. 1 [2]. В её состав входят: импульсный частотно-фазовый детектор (ИЧФД), управляемый генератор тока (ГТ), петлевой фильтр (ПФ), генератор, управляемый напряжением (ГУН) и делитель выходной частоты (ДЧ) для формирования сигнала обратной связи. Импульсный частотно-фазовый детектор предназначен для сравнения положения фронтов сигналов двух входных частот и формирования выходных сигналов управления генератором тока. Установка выходных импульсных сигналов «Отставание» или «Опережение» определяется знаком, а длительность — разностью фаз между фронтами приходящих импульсов опорной частоты F оп и частоты обратной связи F ос .Под воздействием сигналов управления генератор тока либо отдаёт, либо принимает ток с ёмкости ПФ, тем самым формируя на нём напряжение для автоматической подстройки частоты и фазы ГУН. Управление производится таким образом, чтобы устранить фазовую ошибку между фронтами импульсов F оп и F ос , и тем самым ввести систему ФАПЧ в синхронизм. Умножение входной частоты обеспечивается включением делителя выходной частоты ГУН в цепь обратной связи. В установившемся режиме длительность импульсов на выходе детектора, а значит, и импульсов тока, практически приближается к нулю. При этом ёмкость петлевого фильтра работает как элемент запоминания, поддерживая напряжение, сохраняющее требуемую частоту генератора. Поскольку регулирование частоты осуществляется через регистрацию разности фаз, а фаза является интегралом от частоты, то в установившемся режиме обеспечивается астатизм системы по отношению к опорной частоте.
На рис. 2 в форме направленного графа сформирован алгоритм работы ИЧФД, по которому можно проследить закономерности переходов его состояний. Обычно ИЧФД имеет линейную характеристику в диапазоне фазового рассогласования сигналов ±2π и релейную характеристику за этим пределом. Переход в релейную область происходит после прихода подряд второго импульса опорной частоты или частоты обратной связи, что позволяет устранить биения управления при боль- ших отклонениях между частотами приходящих импульсов.
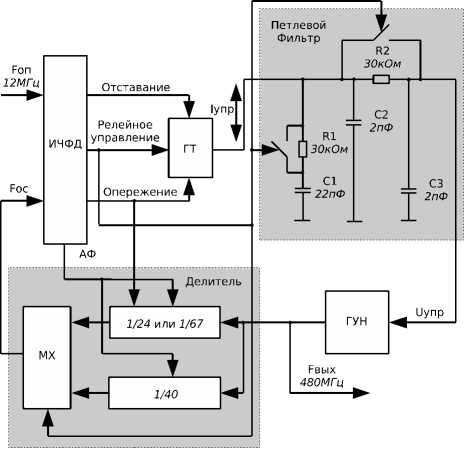
Рис. 1. Структурная схема системы импульс- ной ФАПЧ
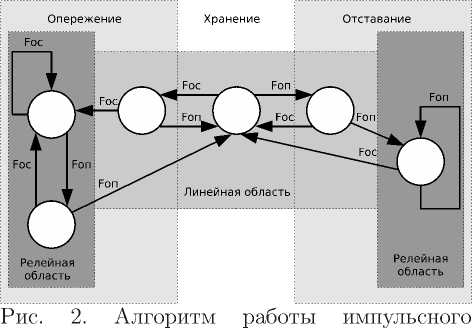
частотно-фазового детектора
В рассматриваемой системе ФАПЧ с точки зрения обеспечения максимального быстродействия одним из параметров для выбора может являться изменение коэффициента усиления цепи обратной связи в зависимости от величины фазовой ошибки сравниваемых сигналов. Помимо этого, имеет смысл использовать раздельное управление в линейной и релейной области работы ИЧФД.
В начале переходного процесса при наличии больших начальных фазовых рассогласований, когда ИЧФД находится в релейной области, генератор тока вырабатывает выходной ток в несколько раз больший, чем при работе в линейной области. При этом регистрируется только знак рассогласования, но не учитывается его величина, и система быстро входит в об- ласть выходных значений, близких к требуемым [1]. Для быстрой установки потенциалов на ёмкостях C1 и C3 ПФ резисторы R1 и R2 шунтируются, как показано на рис. 1.
В связи с тем, что наличие делителя частоты в цепи обратной связи вносит дополнительную инерционность в кольцо ФАПЧ, необходимо, чтобы релейное управление окончилось раньше, иначе возможно перерегулирование. Следовательно, необходимо сдвинуть в сторону опережения момент отключения релейного управления. Для этого ДЧ выполняет деление выходной частоты ГУН на значение, отличное от требуемого в установившемся режиме, но обеспечивающее необходимое упреждение. Соответствующая коммутация сигналов осуществляется с помощью мультиплексора (МХ).
Таким образом, по ходу переходного процесса осуществляется изменение сопротивления резисторов ПФ и выбор выходного сигнала ДЧ между счётчиками с разным модулем счета, и, значит, данную систему можно рассматривать как систему с переменной структурой.
Для улучшения условий захвата при нахождении ИЧФД в релейной области в системе используется автоматическое фазирование (АФ), осуществляющее постоянную подсинхронизацию ДЧ по импульсам опорной частоты. В результате при переходе детектора из релейной области в линейную уменьшается начальное рассогласование сравниваемых сигналов по фазе, система осуществляет надежный захват, сокращаются перерегулирование и, следовательно, время достижения заданного значения выходной частоты. После отработки больших рассогласований и перехода ИЧФД в линейную область процессы в системе ФАПЧ обычно таковы, что абсолютная величина угла рассогласования не превосходит значения ± 2 π и автоматическое фазирование не работает.
Известно, что для получения закона отработки рассогласования, близкого к оптимальному, стремятся вырабатывать сигнал, пропорциональный квадрату рассогласования. Такие регуляторы называют параболическими [3]. В рассматриваемом примере для реализации параболического регулятора необходимо сформировать такое управление, чтобы изменение напря-
ТРУДЫ МФТИ. — 2009. — Том 1, № 2 жения на выходе ПФ было пропорционально квадрату ширины выходных импульсов ИЧФД. Это можно осуществить, основываясь на том, что напряжение на конденсаторе является интегралом от протекающего через него тока. Если во время действия выходного импульса ИЧФД амплитуда тока ГТ — постоянная величина, то напряжение на конденсаторе будет изменяться по линейному закону. Если применить ГТ с линейно возрастающим, с учётом знака, выходным током, то во время действия сигналов управления напряжение на конденсаторе будет изменяться по квадратичному закону. И, таким образом, в линейной области работы системы управление будет зависеть от квадрата ошибки регулирования.
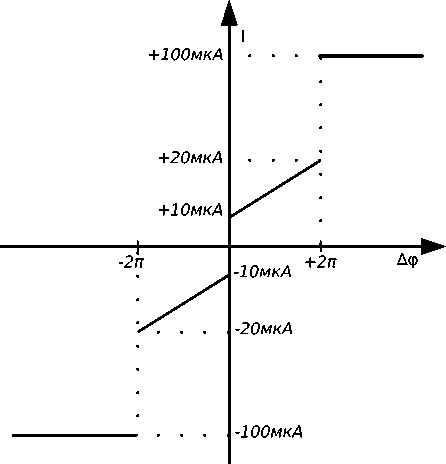
Рис. 3. Зависимость величины выходного тока управляемого генератора тока от фазовой разности сравниваемых на ИЧФД сигналов
Как было ранее замечено, при приближении выходной частоты и фазы сигнала обратной связи к опорному сигналу длительность импульсов тока практически приближается к нулю. В случае применения идеального параболического регулятора амплитуда импульсов тока, а значит, и коэффициент передачи контура в целом также будет стремиться к нулю, и процесс отработки ошибки может затягиваться на неприемлемо длительное время. Решением является наличие у линейно нарастающего выходного тока ГТ фиксированного смещения, как представлено на рис. 3. В рассматриваемом примере величина вы- ходного тока ГТ в начале линейной области равна ± 10 мкА, в конце линейной области — ±20 мкА, а в релейной области — ± 100 мкА.
С точки зрения теории автоматического управления рассматриваемая система ФАПЧ является импульсной системой стабилизации с переменной структурой, нелинейным корректирующим устройством и нелинейным объектом управления, регулирование в которой осуществляется сигналами с широтно-импульсной модуляцией [4]. Вычисление параметров подобной системы аналитическими методами весьма затруднительно и одним из возможных вариантов её синтеза и анализа является математическое моделирование. В данном случае разработка функциональной модели устройства с конкретной схемотехнической реализацией ГУН проводилась в системе проектирования интегральных микросхем AVOCAD [5]. Оценочный расчёт показал, что интегральная реализация предлагаемого устройства по технологии КМОП 0 , 18 мкм может занять на кристалле площадь не более 250 х 250 мкм.
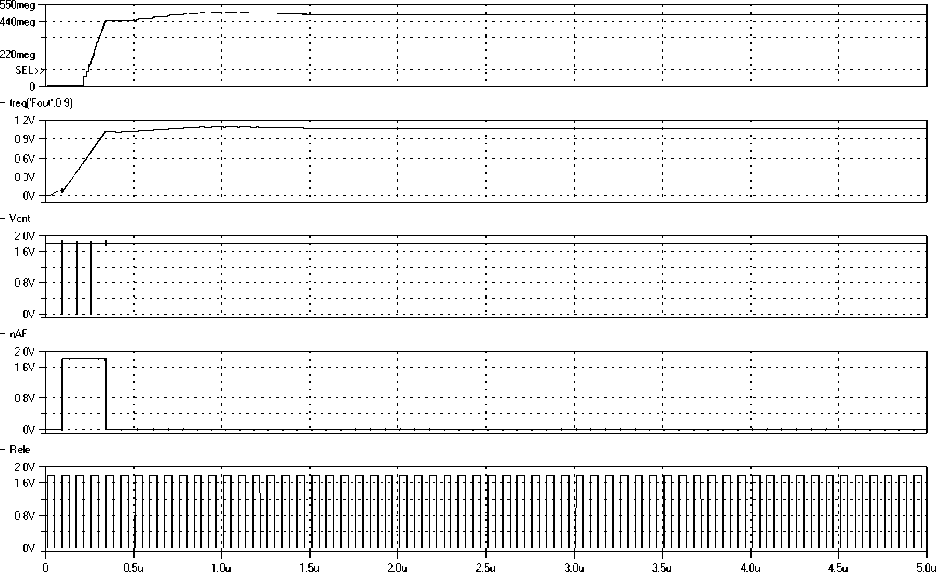
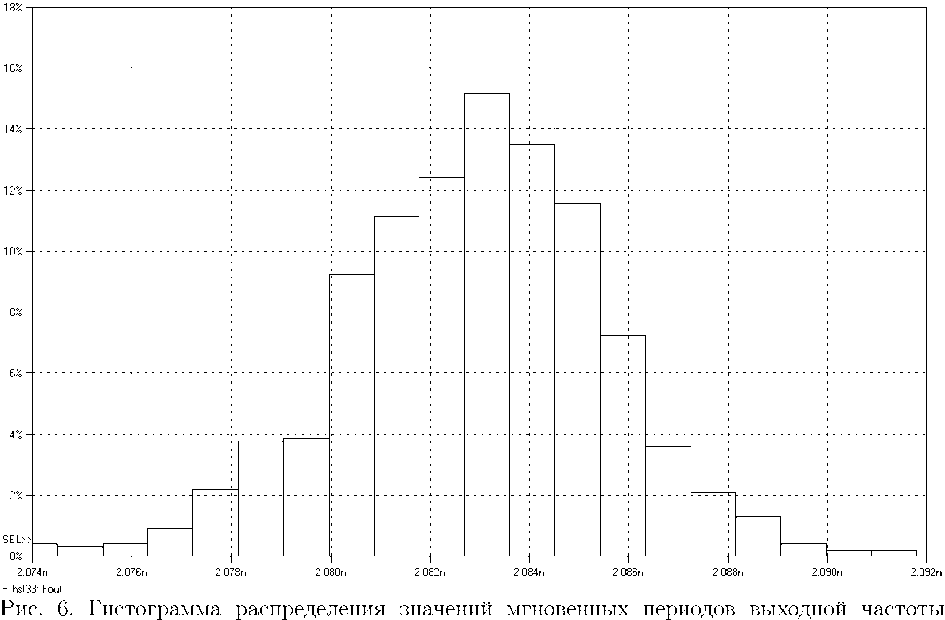
На рис. 4 представлены диаграммы математического моделирования поведения системы во время переходного процесса по включению питания. По диаграммам можно проследить выработку сигналов управления, оценить устойчивость и качество регулирования. Под временем переходного процесса для системы импульсной ФАПЧ будем понимать то наибольшее число тактов опорной частоты, начиная с которого отклонения значения частоты и фазы выходного сигнала не выходят за оговоренный интервал. По второму такту опорной частоты система переходит в релейный режим управления, и напряжение на выходе ПФ начинает быстро расти. Так продолжается в течение следующих тактов, по которым происходит автофазирование делителя контура обратной связи. Задержка начала переходного процесса у диаграммы, показывающей значение выходной частоты ГУН, объясняется тем, что диапазон входного управляющего напряжения ГУН для его рабочих частот лежит в пределах от 0,75 В до 1,25 В, и необходимо время для заряда ёмкости ПФ для выхода на эти значения. На рис. 5 в увеличенном масштабе представлено окончание переходного процесса. После четвёртого такта опорной частоты, в момент времени 0,35 мкс, выходная частота ГУН достигает величины упреждения соответствующего значению 440 МГц. Система переходит в линейную область регулирования, где и осуществляется плавное окончание процесса фазовой синхронизации. В результате время установления выходной частоты с точностью ±0,5% составило 20 тактов опорной частоты, или 1,6 мкс. Перерегулирование при этом не превысило 4,4%. На рис. 6 представлена гистограмма распределения значений мгновенных периодов выходной частоты в установившемся режиме на интервале от 1,6 мкс до 5,0 мкс. Периоды выходной частоты статистически точно равны требуемому значению 2083 пс, при этом мгновенная нестабильность периодов не превышает ± 10 пс.
Поведение устройства во время переходного процесса подтверждает возможность получения в системе рассмотренной структуры достаточно высокой динамической точности. Достигается это за счёт обеспечения рационального изменения общего коэффициента усиления на всех этапах регулирования, когда осуществляется двойное управление — релейное при больших рассогласованиях и параболическое при малых. В начале переходного процесса при больших рассогласованиях система ведёт себя как оптимальная по быстродействию релейная система, замкнутая по частоте, с использованием автоматического фазирования, упреждения и быстрой установкой необходимых потенциалов на ёмкостях ПФ. В конце переходного процесса при малых рассогласованиях система замкнута по фазе и использует квадрат ошибки. Такое управление позволяет с высокой степенью приблизить закон регулирования к оптимальному.
- Fref
Рис. 4. Диаграммы сигналов управления во время переходного процесса по включению питания. Fref — такты входной опорной частоты; Rele — сигнал, означающий нахождение ИЧФД в релейной области работы; nAF — сигнал автоматического фазирования делителя частоты контура обратной связи; Vcnt — напряжение управления выходной частотой ГУН; Fout — значение выходной частоты ГУН
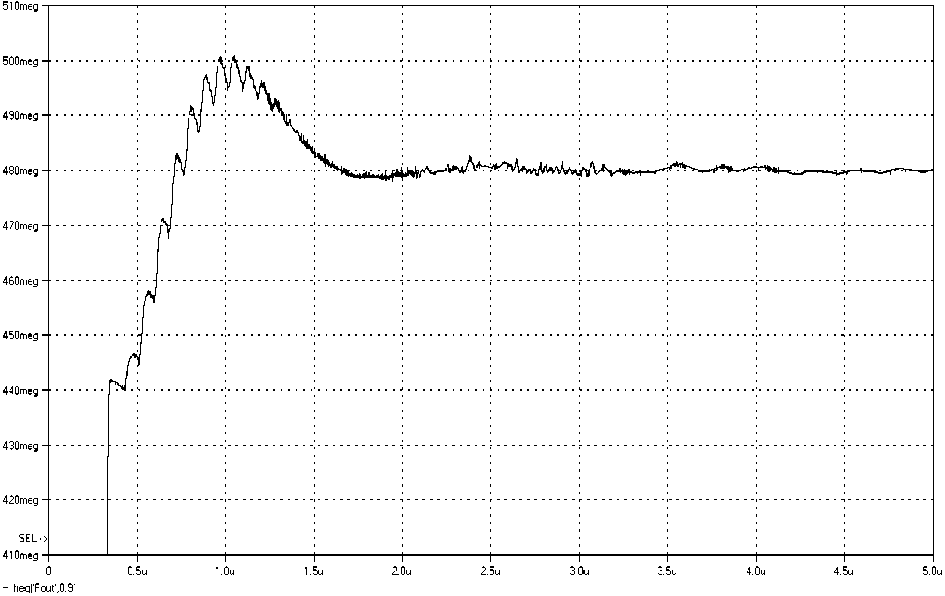
Рис. 5. Окончание переходного процесса установления выходной частоты 480 МГц
в установившемся режиме
Однако необходимо отметить, что подобное специализированное управление даёт положительный эффект только при фиксированных параметрах опорной частоты и коэффициента её умножения и в общем случае может не только не улучшить, но и ухудшить показатели работы системы при изменении входных условий в широком диапазоне. В результате придётся изменять выбранные параметры нелинейной коррекции и упреждения. К тому же на сегодняшний день не существует общей строгой методики синтеза параметров нелинейных корректирующих устройств для оптимизированной по быстродействию системы импульсной ФАПЧ переменной структуры с описанными собственными нелинейностями и нелинейным объектом регулирования. Практически приходится идти методом проб и последовательных приближений, основываясь на литературных рекомендациях при рассмотрении отдельных частных примеров.
