Необходимость применения интеллектуальных систем управления в экспериментальных ядерно-физических комплексах (типа NICA). Ч. I: проблема нештатных ситуаций
. Ч. I: проблема нештатных ситуаций")
Автор: Бровко Олег Игоревич, Елисеев Алексей Викторович, Кекелидзе Владимир Дмитриевич, Кореньков Владимир Васильевич, Монахов Дмитрий Владимирович, Решетников Андрей Геннадьевич, Решетников Геннадий Павлович, Ульянов Сергей Викторович
Журнал: Сетевое научное издание «Системный анализ в науке и образовании» @journal-sanse
Статья в выпуске: 4, 2019 года.
Бесплатный доступ
В статье (Часть I) проанализирована и обоснована необходимость применения сквозных квантовых технологий интеллектуальных вычислений в задачах управления элементами структуры сложного экспериментального ускорительного комплекса NICA. Приведено описание возможных нештатных ситуаций, дана их классификация с целью включения корректировок принятия решений применением продукционных логических правил баз знаний интеллектуальных систем управления с учетом возникающего приращения информационного риска. Во второй части (Часть II) предложена двухуровневая интеллектуальная система управления физической экспериментальной установкой комплекса NICA, в которой на нижнем исполнительном уровне находится традиционная система управления, основанная на экспертном управлении с помощью системы управления Tango Controls, а на верхнем (интеллектуальном) уровне управляющие воздействия формируются с помощью методов сквозных квантовых ИТ проектирования квантового нечёткого регулятора (КНР). В Части II представлен программный инструментарий QSCIT (Quantum Soft Computational Intelligence Toolkit), основанный на мягких и квантовых вычислениях, предназначенный для проектирования робастных баз знаний в самоорганизующихся интеллектуальных системах управления.
Ускорительный комплекс nica, нештатные ситуации, интеллектуальные системы управления, мягкие и квантовые вычисления
Короткий адрес: https://sciup.org/14123302
IDR: 14123302 | УДК: 512.6,
Necessity of intelligent control systems application in experimental nuclear physics complexes (NICA type). Pt. I: problems of unforeseen situations
In the article (Part I) the necessity of application of end-to-end quantum technologies of intelligent computing in problems of structure elements control of complex experimental accelerator complex NICA is analyzed. Given a description of possible unforeseen situations, their classification is given to include adjustments to the decision-making application of production rules, logic knowledge bases of intelligent control systems based on emerging information risk increment. In the second part (Part II) the proposed two-level intelligent control system, a physical experimental setup of the NICA complex, in which the lower Executive level is a traditional control system based on expert control using the Tango control system Controls, while the upper (intelligent) level control actions are generated using the methods of quantum end-to-end IT design quantum fuzzy controller. Part II presents the QSCIT (Quantum Soft Computational Intelligence Toolkit), based on soft and quantum computing, to design robust knowledge bases in self-organizing intelligent control systems.
Текст научной статьи Необходимость применения интеллектуальных систем управления в экспериментальных ядерно-физических комплексах (типа NICA). Ч. I: проблема нештатных ситуаций
В физике высоких энергий особое внимание исследователей фундаментальных проблем строения материи привлекают вопросы, связанные с возникновением Вселенной и, в частности, процессы, происходившие в первые мгновения после так называемого «Большого взрыва».
С целью проведения таких исследований в Дубне, в Объединённом институте ядерных исследований (ОИЯИ), в Лаборатории физики высоких энергий им. В.И. Векслера и А.М. Балдина (ЛФВЭ) создаётся ионный коллайдер – Nuclotron based Ion Collider fAcility ( NICA ) на энергию пучков ионов 4÷11 ГэВ на нуклон (рис. 1).

Рис. 1. Структура мегасайнс проекта NICA с иллюстрацией классических и квантовых объектов управления
Ускорительный комплекс NICA включает в себя инжекционную часть, два синхротрона («Бустер» и «Нуклотрон») и «Коллайдер» - накопительные кольца встречных ускоренных пучков ядер с двумя точками их столкновений, в которых расположены детекторы, регистрирующие фрагменты ядерных реакций: Multi Purpose Detector ( MPD ) - многофункциональный детектор и Spin Physics Detector ( SPD ) - детектор для исследования физики поляризационных явлений.
На комплексе запланирована тяжелоионная (вплоть до ионов золота) и спиновая программы экспериментальных исследований [1-5].
Особенности управления физическими процессами мега проекта NICA
Мегапроект NICA ставит беспрецедентные задачи, связанные с исследованием кварк-глюонной плазмы вблизи точки фазового перехода ядерной материи [5]. Решение таких задач требует привлечения современных методов экспериментальной ядерной физики, обеспечивающих столкновения пучков релятивистских частиц, создания новых моделей в теории релятивистской плазмы, моделей квантовых неразрушающих измерений, моделей квантового управления и квантовой фильтрации данных измерений, построения моделей квантовых (не)инерциальных систем отсчета косвенных наблюдений в слабом гравитационном поле и мн. др. Рассмотрение перечисленных задач требует одновременно пересмотра основ ядерной физики, физики элементарных частиц и квантовой релятивистской механики, включая теории гравитации и квантовой релятивистской термодинамики. Решение подобного рода задач приводит к рассмотрению вопросов о физической строгости и математической корректности применяемых моделей физических процессов.
Реализация такого проекта вызывает необходимость использования квантовой релятивистской информатики (КРИ) в процессах сбора, передачи и обработки данных, а также формирования физически корректной интерпретации полученных экспериментальных результатов. КРИ, в свою очередь, обуславливает применение квантовых цифровых технологий, технологий ИИ, интеллектуального управления, суперкомпьютинга и GRID для решения различных задач, возникающих в процессе управления, настройки и проведения экспериментальных исследований.
Для решения задач сбора, обработки и извлечения полезной информации из огромного массива экспоненциально растущих потоков неупорядоченных экспериментальных данных требуется разра- ботка новой ветви теории искусственного интеллекта (ИИ) в виде построения моделей исследуемых физических процессов, в частности, методами квантового глубокого машинного обучения и квантовых генетических алгоритмов.
Задачи управления сложными объектами, в общем случае, требуют формализации, установления физической корректности и математической строгости модели исследуемого процесса (объекта). Их решение, в свою очередь, предполагает осуществления сбора и статистической обработки большого количества недостаточно определённых показателей состояния объекта. В частности, задачи исследования, верификации и идентификации моделей квантовых динамических систем предполагают осуществление оперативной обработки большого потока неоднородных экспериментальных данных.
Управление динамикой пучков ускорительного комплекса, при выборе оптимальных параметров и получения требуемой повторяемости быстро протекающих процессов, требуют от оператора зала управления принятия решений в условиях информационного риска: с одной стороны, избытка информации о состоянии экспериментального оборудования, а с другой стороны, неполноты описания динамики показателей состояния различных распределенных элементов комплекса.
В этом случае физическая модель объекта управления и его математическая модель относятся к так называемым слабо формализованным моделям. А корректное управление динамикой подобных объектов требует привлечения новых информационных технологий и методов интеллектуального управления [7, 12-15], позволяющих компенсировать особенности и сложность объекта управления соответствующей полнотой базы знаний в системе управления.
Комплекс NICA и задачи управления
Рассмотрим некоторые особенности физической природы структуры и принципов работы составляющих и всего комплекса NICA , которые необходимо учитывать при разработке самоорганизующихся интеллектуальных систем управления и выборе соответствующего программноалгоритмического инструментария.
С этой целью напомним кратко особенности решаемых технических задач управления на комплексе NICA .
Физические особенности задач управления на комплексе NICA
Задачи, которые необходимо решать при управлении режимами ускорительных систем являются многопараметрическими и связаны с необходимостью достижения оптимальной и устойчивой динамики пучков путём управления показателями состояния структур ускорительного комплекса в различные моменты процесса ускорения.
Типовые задачи управления режимами можно разбить на группы со следующими особенностями:
-
- Управление инжекционной частью Коллайдера (источник, линейный ускоритель, Бустер, Нуклотрон и каналы транспортировки частиц). Цель состоит в оптимальной настройке инжекционной цепочки с точки зрения минимизации количества ускорительных циклов для заполнения колец Коллайдера нужным количеством частиц. Для достижения этой цели необходимо обеспечить максимально возможное количество частиц в начале инжекционной цепочки и минимизировать потери в процессе ускорения и переброски пучка между ускорителями. Длительность инжекционного цикла составляет ~4 сек, а количество циклов для заполнения обеих колец Коллайдера порядка 100. Для поддержания повторяемости циклов необходимо следить за многочисленными временными дрейфами и прочими временными изменениями системы с принятием быстрых решений
-
- Управление накоплением частиц в кольцах Коллайдера и его выход на энергию эксперимента (ускорение/замедление накопленных частиц). Этот этап работы предусматривает большую
(практически безграничную) вариативность сценариев. В дополнение к временным дрейфам и изменениям системы, аналогичных п.1. меняются параметры управляемого объекта (пучка), а именно его интенсивность и фазовый объем. Характерное время для этого этапа работы комплекса составляет около 10 мин.
-
- Работа Коллайдера на физический эксперимент . Этап включает перестройку магнитной оптики обеих колец для работы в режиме столкновений и проведение прецизионной настройки сведения сталкивающихся пучков. Длительное поддержание и подстройка требуемого для эксперимента режима в условиях деградации параметров пучков. Характерное время работы от нескольких десятков минут до нескольких часов
-
- Работа инжекционных синхротронов (Бустер и Нуклотрон) для физических экспериментов как на внутренних мишенях, так и на выведенных пучках . Требует решения задач п.1 с возможностью быстрого восстановления режима инжектора для пополнения частиц в кольцах коллайдера.
Качество управления перечисленными группами зависит от выбора модели управления, адекватность которой определяется уровнем физической строгости описания исследуемых процессов. Поэтому, для создания моделей перечисленных процессов необходимы, как аппарат классической физики, так и методы релятивистской квантовой механики, а управление такими моделями естественно требует, согласно информационно-термодинамическому критерию, применения аппарата квантовой релятивистской информатики.
При этом, каждый из режимов управления комплексом требует от операторов оптимального управления рядом показателей соответствующих систем и компетентного модельного представления о динамике и параметрах модели процесса, а также знания физических особенностей ускорительно накопительного комплекса (УНК). Такой процесс управления не свободен от случайных факторов, например, в виде помех или непредвиденных ситуаций, представленных ниже.
Ситуация с управлением УНК также осложняется эффектом не сохранения постоянства показателей состояния ряда систем в течение сеансов работы ускорительного комплекса и, особенно, от сеанса к сеансу, что требует затрат ресурсов на настройку режимов. Зачастую, уже отлаженные опытным путём режимы повторно не показывают оптимального уровня решения задачи управления, что связано со многими известными, а также с недостаточно определёнными факторами. В связи с отмеченным рассмотрим схематично краткое описание комплекса.
Физические особенности достижения оптимальной и устойчивой динамики пучков на комплексе NICA
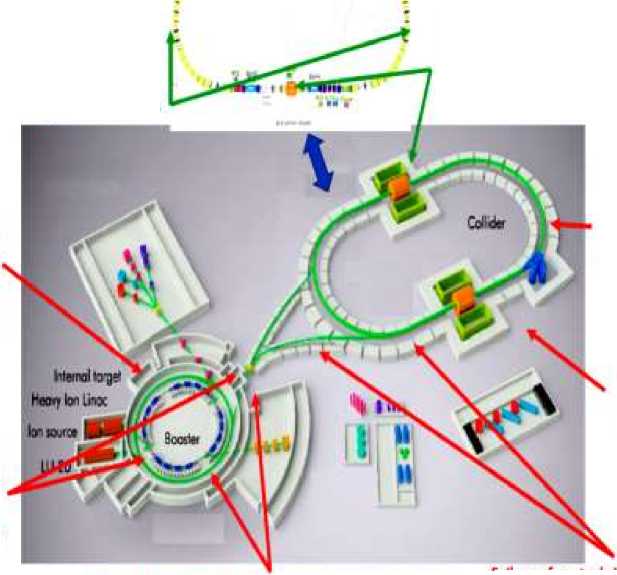
Инжекционная часть для программы работы комплекса с тяжелыми ионами состоит из ионного источника и линейного ускорителя HILAC . Канал транспортировки переводит ионы в кольцо Бустера. Накопление достаточного количества частиц осуществляется за 2-3 инжекции. После этого ионы занимают весь периметр Бустера, собираются в пять сгустков ускоряющей системой ускоряются до промежуточной энергии. Происходит выключение ВЧ станции и электронное охлаждение частиц. После охлаждения ускоряющие станции включаются с частотой равной частоте обращения частиц. Ионы группируются в один сгусток с дальнейшим ускорением до энергии перевода, при этом происходит синхронизация ускорителей и перепуск сгустка ионов в Нуклотрон (рис. 2).
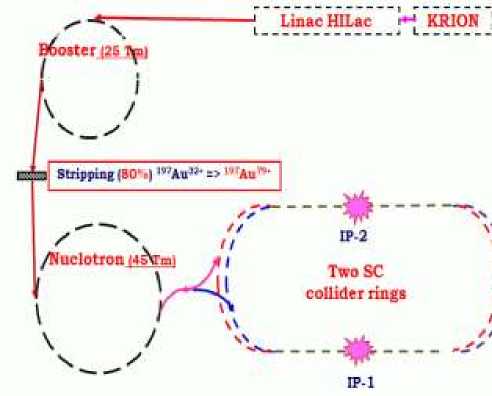
Рис. 2. Схема комплекса NICA
XIA .

Для полной обдирки ионов в канале транспортировки устанавливается обдирочная мишень (фольга). В Нуклотроне происходит дальнейшее ускорение частиц до энергии перепуска в кольца Коллайдера, где на встречных пучках частицы сталкиваются в заданных точках. Коллайдер может самостоятельно ускорять накопленные частицы любой из своих трех ВЧ систем, сообразуясь с практикой и удобством эксплуатации. Общая схема работы Коллайдера может быть представлена следующими этапами: накопление, ускорение/замедление, эксперимент, (замедление/ускорение, донакоп-ление, ускорение/замедление, эксперимент∙Nраз), сброс пучка.
При этом сам процесс подготовки уникального экспериментального оборудования сопровождается согласованием и настройкой, и поддержанием длительное время большого числа управляющих параметров как отдельных подсистем, так и режимов их взаимодействия.
При длительном сохранении достаточной для физического эксперимента светимости (ориентировочно около 2 часов) ускорители Бустер и Нуклотрон могут быть использованы для проведения параллельных независимых от Коллайдера физических экспериментов, как на внутренних мишенях, так и на выведенных из ускорителей пучках. С одной стороны это создает дополнительные сложности, а с другой стороны бросает вызовы и открывает перспективы для применения ИТ в комплексе НИКА
Пример 1. Корректирующие магнитные элементы предварительного ускорителя Бустер
В качестве примера сложности процесса подготовки оборудования может быть представлен ускоритель Бустер (рис. 3).
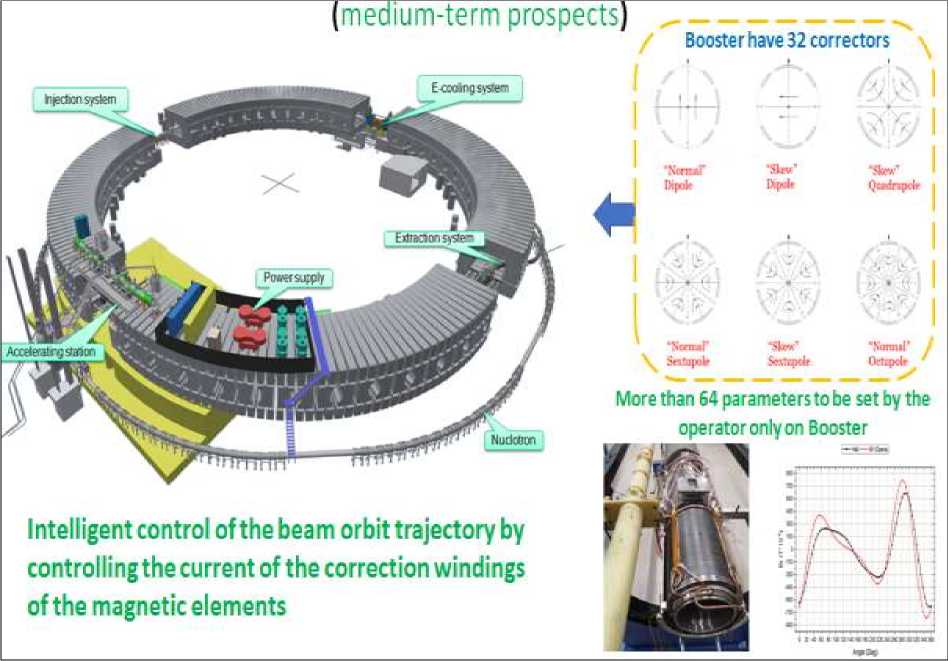
Рис. 3. Корректирующие элементы Бустера
Бустер [2] может накопить 2∙10 9 ионов Au +31 , поступающих из линейного ускорителя HILAC . Установка группирует ионы в 5 сгустков и ускоряет их до промежуточной энергии ~65 МэВ/н. Затем в Бустере происходит разгруппировка пучка и его электронное охлаждение. Далее Бустер набирает охлажденный пучок в один сгусток и ускоряет его для перевода в Нуклотрон. При этом, установка содержит тридцать два (32) магнитных корректора для стабилизации орбиты пучка. В процессе настройки оператору необходимо установить более 32 параметров только данной подсистемы в Бустере (рис. 3 и 4).
Пример 2. Интеллектуальное управление ВЧ станции
Другим примером управляемой подсистемы является подсистема автоматической перестройки частоты ВЧ станций. В процессе перестройки частоты высокочастотных станций (ВЧ) появляются непредвиденные «паразитные» колебания, частотный спектр которых невозможно предсказать. В таких условиях задача разработки самоорганизующихся ИСУ, способных функционировать и гарантировать достижение цели управления в условиях нештатных ситуаций и информационного риска, является актуальной для комплекса NICA .
Закон изменения магнитного поля Bo (t) (рис. 5) в синхротронах задаётся управляемыми сильноточными источниками системы питания магнитов и зависит от параметров системы питания и требованиями эксперимента. Например, функция Bo (t) близка к трапециевидной форме с экспонен- циальными переходами между плато
(«столом») и линейным ростом B
( t ) .
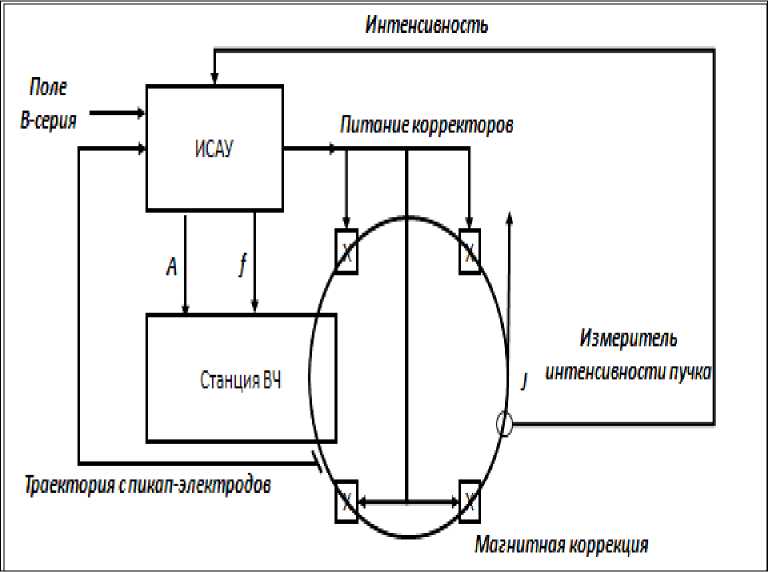
Рис. 4. Структура интеллектуальной системы управления высокочастотной станции и корректирующими магнитами
В зависимости от величины и формы ведущего магнитного поля ускорителя ИСУ способна настраивать частоту ( f ) и амплитуду ( A ) ускоряющей частоты так, чтобы получить заданную интенсивность ( J ) пучка частиц в конце цикла ускорения на «столе» магнитного поля (рис. 5).
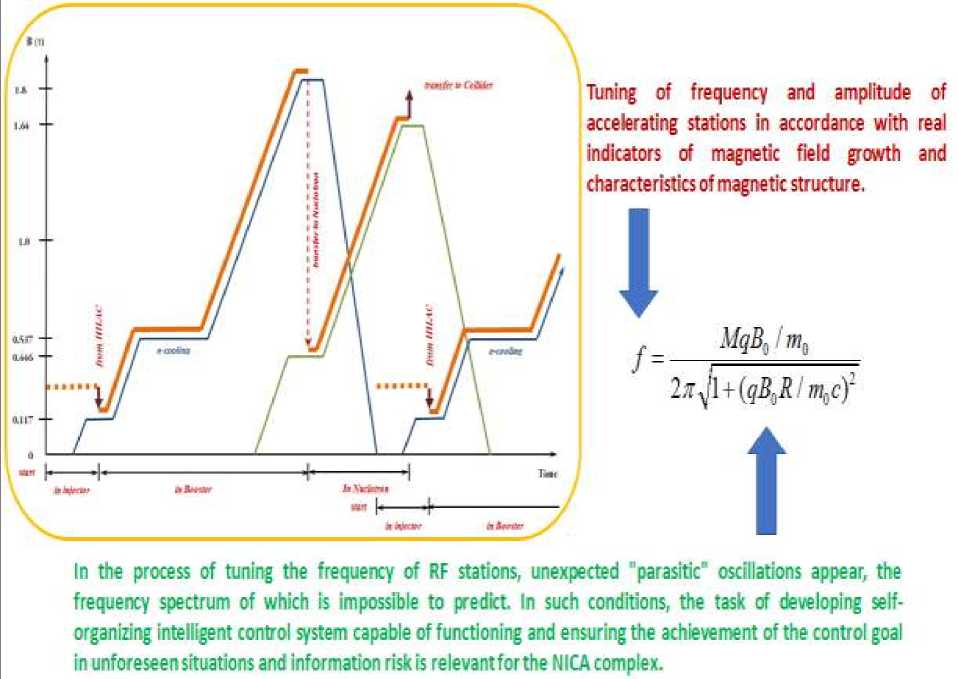
Рис. 5. Циклы магнитного поля Бустера и Нуклотрона
На рис. 6 представлена двухуровневая система управления, где на нижнем уровне осуществляется сбор, обработка и хранение информации для формирования управляющего воздействия на исполнительные устройства.
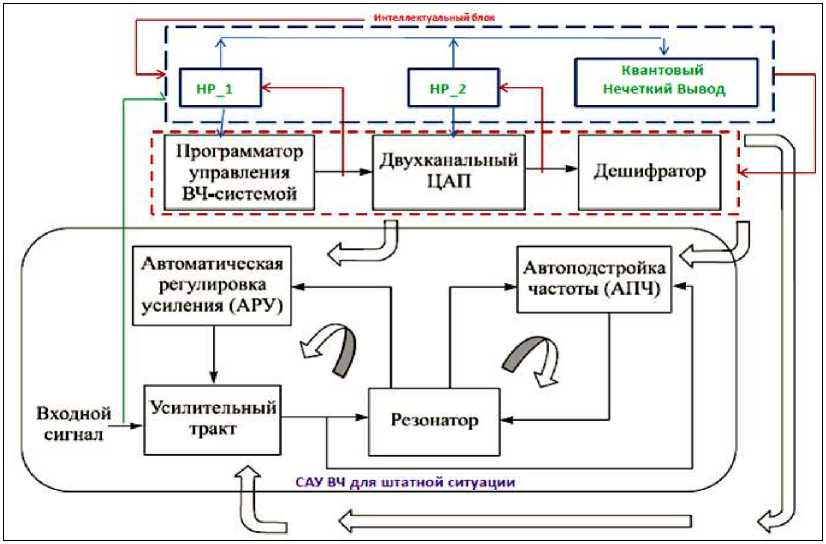
Рис. 6. Интеллектуальная надстройка в виде нечеткого регулятора и квантового нечеткого вывода в задаче управления высокочастотной станцией
На верхнем уровне, формирующем воздействия на исполнительные механизмы ускорителя NICA, представление и передача знаний, и обратные связи передачи информации, реализующие управляющие контуры для поддержания режима функционирования системы в автоматическом режиме. Формирования такой системы позволит повысить эффективность работы NICA, понизить потери полезного ресурса регуляторов и требует минимальной исходной информации для выработки управляющих воздействий. Разработка и внедрение иерархической ИСУ позволит решить задачи гарантированного достижения цели управления и соответственно ожидаемого результата в режиме работы ускорителя. Важно отметить, что при этом не требуется дополнительной установки датчиков или исполнительных механизмов в структуру УНК, т.к. повышение эффективность достигается только за счет программных средств верхнего уровня (интеллектуальной надстройки) системы управления.
Экспериментальная программа NICA должна сопровождаться повышенным уровнем повторяемости и надежности проводимых исследований за счет ИСУ способных адаптироваться и обучатся под различные ситуации управления, в том числе и непредвиденные. Единая система интеллектуального управления в этом случае необходима для согласования ускорителей и правильного перевода с учетом изменения заряда ионов, потери энергии и увеличения продольного эмиттанса в канале транспортировки (см. рис. 5 и 6).
Из многочисленных моделей управления предлагается использовать технологии мягких и квантовых вычислений, т.к. эти инновационные сквозные квантовые технологии составляют программно–алгоритмическую платформу для проектирования иерархических самоорганизующихся ИСУ, способных функционировать и гарантировать достижение цели управления в условиях непредвиденных (нештатных) ситуаций и информационного риска с требуемым уровнем робастности.
Пример 3. Управление процессом накопления ионов в коллайдере
Наиболее сложными объектами, демонстрирующими необходимость применения квантовых интеллектуальных технологий управления, являются сталкивающиеся встречные пучки ускоренных ядер. По своей природе, в процессе подготовки и проведения эксперимента, это квантовые объекты управления, а целью управления этими объектами является перевод их в требуемое состояние и сведение в точках расположения детектирующей аппаратуры. Для достижения требуемого уровня светимости требуется прецизионная точность эксперимента, в то время как возможны только косвенные измерения показателей состояния процесса. В принципе, измерения состояния пучка изменяет его состояние, а неоднородности элементов структуры физической установки и гармонического состава динамических магнитных полей усложняют задачу моделирования процесса управления и обуславливают применения методов квантовой фильтрации, квантовых неразрушающих (косвенных) измерений и, следовательно, квантового интеллектуального управления (рис. 7).
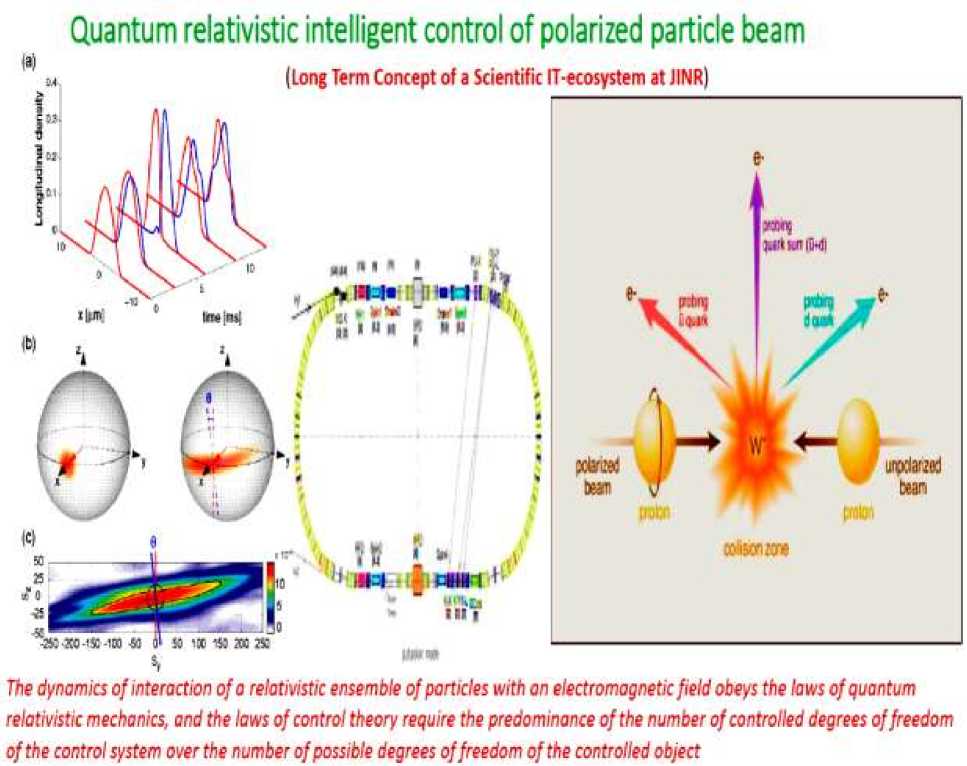
Рис. 7. Квантовый объект управления
При разработке моделей физических процессов важную роль играет понятие физической строгости и математической корректности описания исследуемого объекта.
Рассмотрим кратко примеры влияния учета ограничений на физическую интерпретацию природы исследуемого объекта при построении соответствующих моделей описания.
Корректность моделей ОУ: Квантовые, информационно-термодинамические и релятивистские ограничения
Роль и влияние геометрии пространства-времени и релятивистских ограничений на корректность описания моделей ОУ отмечалась многими исследователями. Рассмотрим также аналогичные ограничения с позиции принципов квантовой и релятивистской механики.
Корректность идентификации моделей ОУ (Quantum supremacy) . В общей теории динамических систем в ряде случаев оптимальные статистические процедуры для Гауссовских случайных полей оказываются, как правило, линейными. Для стационарных полей линейные статистические задачи приводят к исследованию уравнений Фредгольма 1 -го рода типа
[ x ( t ) , k ( t ) ]) некорректными за-
и являются (для идентификации ОУ или его входного сигнала дачами по Тихонову. Учет квантовой природы описываемых полей (например, бозонных) приводит к рассмотрению интегрального уравнения Фредгольма 2-го рода типа [8-10]:
у ( t )
h
x
t
(t) +j k (t - s ) x ( s ) ds,
t g [ 0, T ] , [ x, у ] = th ,
где h - постоянная Планка.
Таким образом, учет квантовой природы физического поля (квантовые ограничения в виде некоммутативности наблюдаемых) приводит к естественной регуляризации некорректных задач, исследуемых в теории управления традиционными ОУ.
Квантовые ограничения на пропускную способность канала передачи информации. В классической теории информации К. Шенноном получено выражение пропускной способности канала связи с соотношением P / N (сигнал/шум) и полосой пропускания W = — следующего вида:
2 п
C = W ln 1 +--. Из данного выражения следует, что при N ^ 0 величина C ^ ш, что физически нереализуемо. Для квантового канала передачи информации с учетом квантовых флуктуаций для
, где N 0 - ин-
пропускной способности C имеем следующее выражение [9]: C = W ln 1 +-- k N + N 0 )
тенсивность квантового шума. Таким образом, при N ^ 0 , lim C = W ln 1 +-- , т.е., является ве-
N > 0
N личиной ограниченной.
Рассмотрим теперь особенности влияния релятивистских ограничений на выбор модели ОУ.
Релятивистские ограничения и корректность модели ОУ. Выбор физического базиса проведения эксперимента и определение математического способа (задания критерия корректного описания) модели ОУ существенно влияют на качество интерпретации результата процесса обработки экспериментальных данных и извлечения объективных знаний из динамического поведения самого ОУ.
Пример 1: Движение заряженной частицы вдоль релятивистского брахистохрона с учетом излучения мощности в заданном электрическом поле. Мощность P (t) излучаемой энергии заряжен- ной частицы (например, в синхротроне) пропорциональна множителю 1
—
v 2
c 2
л — 2
, т.е., при v ^ c
(скоростях движения, близких к скорости света) потери энергии на излучение могут быть весьма большими. В случае релятивистского брахистохрона, соответствующая величина P ( t ) имеет вид:
P (t )=11^, V ’ 3 4-
c 1 —
v2 (t)
2 c
If - + ^ A
, что справедливо для произвольной орбиты с параметрами q
22 п/л 2 qа и а . В случае замкнутой орбиты имеем: P ( t ) =-- c
3 4 п
1 — v i«
2 c
•
Таким образом, в рассмотренном случае потеря энергии на излучение (при v ^ c ) стремятся к минимуму и решение задачи (без учета потерь на диссипативные процессы) оптимальны •
Рассмотрим и сравним аналогичные результаты для релятивистского таутохрона.
В этом случае выражение для рассеяния энергии имеет вид
P ( t ) = 2 q a v ' 34 n c
—
c 2

где имеет место соотношение
Таким образом, результат существенно отличается от случая релятивистского брахистохрона [9,10]. Следовательно, более корректный учет физической особенности движения релятивистской системы также может приводить непосредственно к оптимальным решениям.
Особенности управления процессом накопления ионов в Коллайдере
Процесс накопления ионов в коллайдере состоит из 10 фаз, каждая из которых нуждается в отдельной системе интеллектуального управления.
Фаза «0» - момент пролета центра стека главного кольца мимо ускоряющего зазора резонатора.
Фаза «02» второго кольца сдвинута на угол в (угол между станциями колец), при этом стеки будут пересекаться только в арках коллайдера (рис. 8).
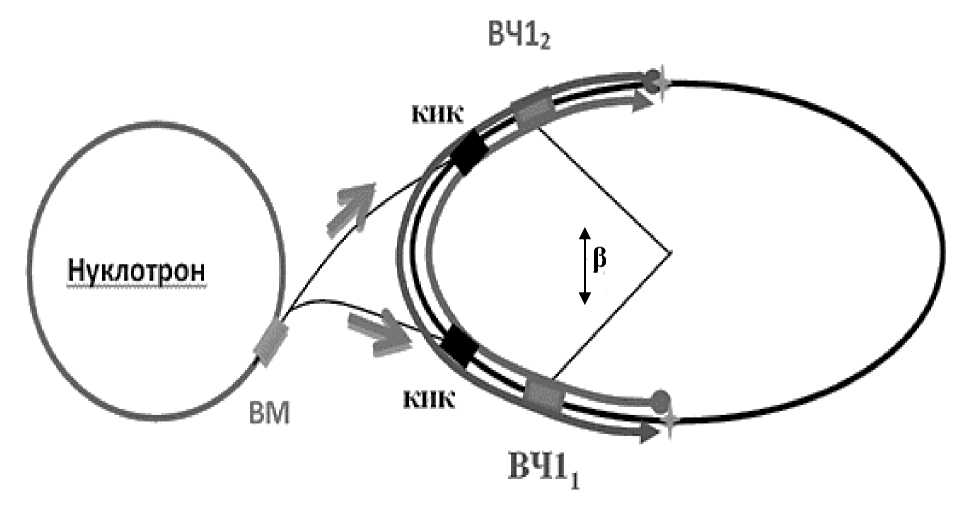
Рис. 8. Схема движения стеков разных колец в Коллайдере. Стеки пересекаются только в арках
При этом счетчик определяет четное сбрасывание и нечетное, для перевода в главное кольцо, нечетное – во второе.
Время движения к стеку определяются независимо, так, чтобы перевод в Коллайдер зависел только от готовности Нуклотрона и положения стека.
Ноль на счетчике – первая инжекция, определяющая систему координат работы коллайдера. Передний фронт переднего барьера минус π/2 – определяет фазу «0». Единица на счетчике – первая инжекция во второе кольцо. Инжекция сдвинута на угол β относительно фазы переднего фронта барьера главного кольца. Передний фронт минус π/2 определяет фазу «02» – центр второго стека. После этого начинается накопление.
После сигнала готовности Нуклотрона и сигнала обратной связи от стека соответствующего кольца (счетчик чет-нечет) запускается выводной магнит. Первые 4-е инжекции в каждое кольцо – уникальные. 4-е раза по 200 нс для образования полного стека. При слиянии со стеком внутренние барьеры уменьшаются.
Если сигнал прошел, а реального «банча» нет, то следует возврат счетчика в предыдущее состояние с повторной инжекцией в кольцо.
Последующие инжекции проходят по схеме (рис. 9).
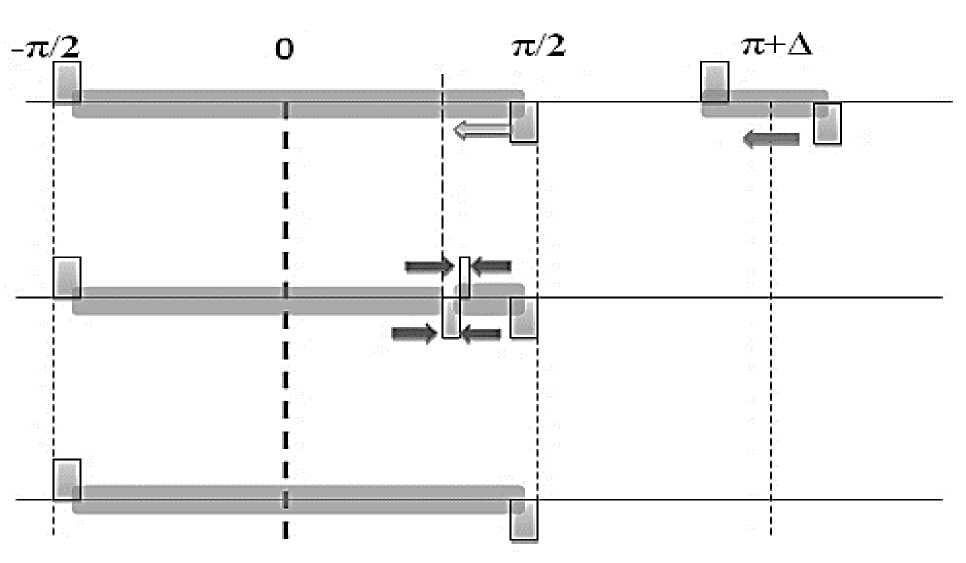
Рис. 9. Схема накопления ионов: добавление новой инжекции в стек
Правильное положение улавливающих барьеров устанавливаются с помощью быстрого преобразователя тока (БПТ) с полосой пропускания до 1ГГц, который определяет положение и фронты стека, а также порции новой инжекции (см. рис. 10).
Выравнивание по импульсному разбросу возможно с помощью обратной связи с пикапа системы стохастического охлаждения. Количество накопленных частиц определяются с помощью интегрального преобразователя тока (ИПТ). После достижения нужной интенсивности в обоих кольцах счетчик сбрасывается и накопление прекращается. Подготавливается процедура включения ускоряющего меандра.
Интеллектуальная система управления на рис. 10 позиционируется в виде надстройки к АСУ Коллайдер, не разрушающей нижние уровни управления ускорителем, и формирующей рекомендации операторам пульта управления.
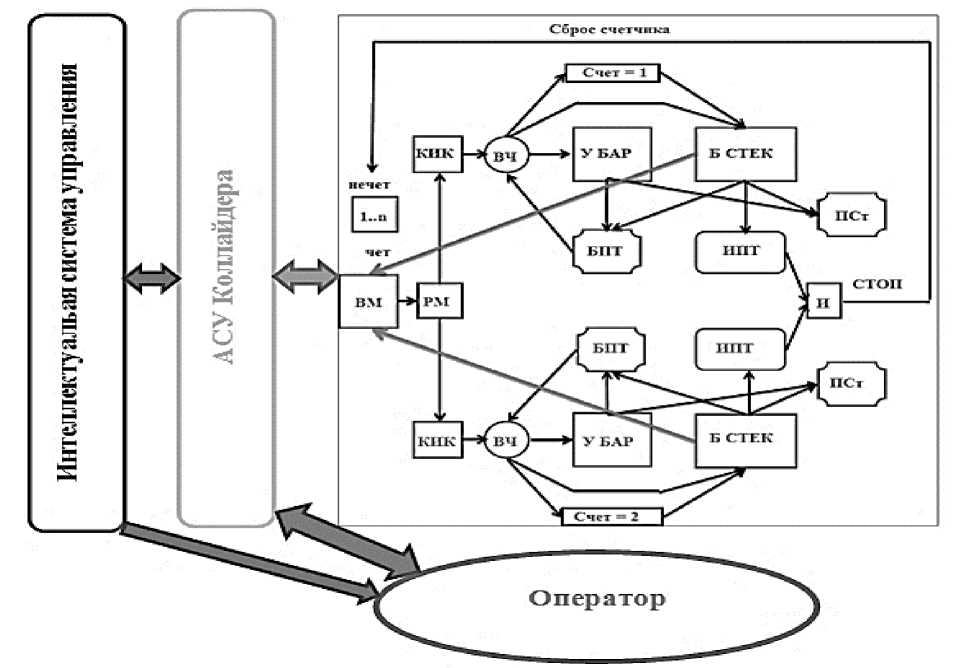
Рис. 10. Блок-схема управления накоплением в Коллайдере. ВМ - выводной магнит Нуклотрона, РМ - разводящий магнит в канале Нуклотрон - Коллайдер. КИК - вводной «кикер», ВЧ - ускорительная станция, БПТ- быстрый преобразователь тока, ИПТ- интегральный преобразователь тока, ПСт - пикап стохастического охлаждения, УБАР - улавливающие барьеры и «банч» инжекции, БСТЕК- барьеры стека и сам стек. (1_и) - счетчик, (Счет = 1, 2) - показания 1 и 2
на счетчике
В табл. 1 представлены объекты управления интеллектуальной системы управления процессом накопления ионов в Коллайдере.
Таблица 1 . Элементы системы управления процессом накопления ионов
|
Элементы, участвующие в накоплении |
Сигналы |
Задержки и сдвиги фаз |
|
ВЧ Нуклотрона Выводной магнит Нукло-трона Раздаточный магнит канала транспортировки + импульсные магниты и линзы каналов. «Кикеры» колец Быстрые преобразователи тока для контроля и коррекции фронтов барьеров |
Сигнал готовности Нукло-трона Сигнал на выводной магнит триггер на разводящий магнит сигнал запуска всех импульсных элементов каналов транспортировки Сигнал со счетчика на включение готовности элемен- |
Задержка между запуском выводного магнита и импульсом запуска кикеров, функция энергии, зависит от кольца Задержка между запуском кикера и выставлением улавливающих барьеров Задание времени движения инжекции к стеку. Должно быть меньше ~8 сек. Сдвиг фаз между центра- |
|
Интегральный преобразователь тока для остановки накопления при достижении нужной интенсивности. Пикапы системы стохастического охлаждения для определения импульсного разброса в стеке накопления. |
тов соответствующего кольца Запуск кикеров ВЧ сигналы 8 фронтов Сигнал обратной связи ВЧ 1 Сигнал с зазора ВЧ 1 Сигнал обратной связи с пикапов Сигнал обратной связи с переднего фронта переднего барьера стека ведущего кольца на запуск инжекции в ведомое кольцо Сигнал на остановку накопления и сброс счетчика инжекций Сигнал на включение процедуры включения ускоряющего меандра |
ми стеков (или передними фронтами передних барьеров стека) – угол между станциями в разных кольцах Сдвиг фаз относительно π-Δ (между центром стека и инжекцией), определяется кривизной трапеции инжекционного кикера. |
В настоящее время, для построения и развития области использования ИСУ уже решен ряд ключевых задач:
-
- Разработан «нечеткий» ( fuzzy ) регулятор (НР), реализующий процесс самоорганизации неточных «базы знаний»;
-
- Разработана система измерения бетатронных чисел ( Q–measurement system ) и протестирована на ускорителе Нуклотрон, которая необходима для настройки рабочей точки ускорителя;
-
- Разработана цикло задающая аппаратура, управляющая циклом ускорения;
-
- Разработана система синхронизации на базе быстродействующих оптических трансиверов для раздачи сигналов цикло задающей аппаратуры потребителям: система управления магнитным полем, ВЧ–система, системы инжекции комплекса NICA .
Однако, необходимо разработать:
-
- Математическую модель ускорителя Booster для моделирования ИСУ: изучение влияния шумов на процесс обучения ИСУ и формирования «базы знаний»;
-
- «Базу знаний» для хранения динамических параметров ускорителя Booster, оптимизированной для работы в сети системы управления ускорительным комплексом NICA, построенной на базе Tango Controls 1 .
Пучок, являясь релятивистским объектом управления, считается, при оперативном управлении процессом ускорения, определенным, если известны его макрохарактеристики: эмиттанс, интенсивность и положение в пространстве. Эмиттанс разделяют на две компоненты поперечный продольный и в первом приближении их можно считать независимыми друг от друга. Продольная компонента эмиттанса пучка, интенсивность и положение его в вакуумной камере доступны управлению и оперативному слежению.
С другой стороны, динамика взаимодействия релятивистского ансамбля частиц с электромагнитное поле подчиняется законам квантовой механики, а законы теории управления требуют преобладание числа контролируемых степеней свободы системы управления над числом возможные степени свободы контролируемого объекта, учесть которые классическими вычислениями и методами искусственного интеллекта, без привлечения квантовых вычислений алгоритмически невозможно.
В настоящее время, разработка сквозных квантовых технологий стала приоритетной в ведущих странах и привела к развитию многих смежных ИТ. В данной работе квантовые технологии на основе квантовых вычислений выбраны не случайно, так как их применение в задачах интеллектуального управления привело к решению классически алгоритмически неразрешимой задачи глобального робастного управления нелинейными объектами управления (ОУ) в нештатных ситуациях за счет обнаруженного синергетического информационного эффекта: из не робастных баз знаний (БЗ), не справляющихся с новой ситуацией управления, за счет применения квантового нечеткого вывода -КНВ (новый квантовый поисковый алгоритм самоорганизации знаний) - можно спроектировать в реальном времени робастную БЗ.
Непредвиденные ситуации в системе управления
Такого рода мегаустановки относятся к классу плохо формализуемых систем, поэтому оптимальное управление подобного рода физическими системами сталкивается с рядом слабо исследованных проблем, и одна из них - возникновение во время проведения эксперимента нештатных ситуаций. Так, например, опыт, приобретённый в ЛФВЭ ОИЯИ в результате эксплуатации первого в мире сверхпроводящего ускорителя ядер «Нуклотрон», показал возможность возникновения трудностей при управлении ускорительным комплексом, особенно при внештатных и непредвиденных ситуаций, возникавших в течение сеансов работы (рис. 11):
-
- непредвиденная просадка напряжения электроснабжения, приводящая к перезагрузке компьютеров, перенастройке системы задающей электроники управляющих сигналов и других систем;
-
- нештатный переход сверхпроводящих магнитных структур в нормальное состояние с экстренной эвакуацией запасённой энергии, например, вследствие непредвиденного облучения ускоряемым пучком сверхпроводящих обмоток или воздействия помех, воздействующих на датчики перехода сверхпроводящих обмоток;
-
- возникновение в СП элементах обмоток магнитной структуры, вследствие радиационного воздействия пучка, локальных нестационарных ограниченных нормальных зон, приводящее к перераспределению плотности тока в проводниках обмотки, соответственно, изменению гармонического состава магнитного поля в апертурах СП магнитных систем [16 - 19], что, естественно, влияет на динамику траектории пучка;
-
- возникновение, например, при некоторых режимах работы ВЧ станций помех уровня, превышающего порог чувствительности системы защиты от переходов магнитов в нормальное состояние, что приводит к экстренному срабатыванию системы защиты;
-
- сбои в работе управляющей электроники или ускоряющих ВЧ станций в связи с (дефектами) случайными неисправностями или износом оборудования;
-
- нештатные потери и снижение интенсивности пучка при переходных режимах изменения магнитного поля ускорительного кольца;
-
- потери при транспортировке и переводе пучка между отдельными ускорительными структурами;
-
- наводки от ускоряющих ВЧ станций на пикап - электроды, диагностирующие динамику пучка, в частности, при низких интенсивностях;
-
- нештатные ситуации с охлаждающими и вакуумными системами кольца.
Традиционные системы управления принципиально не учитывают возникновение нештатных ситуаций управления и не включают в контур управления человеческий фактор, что не гарантирует своевременного достижения цели управления - получение максимальной интенсивности ускоренного пучка и устойчивое повторение требуемых режимов ускорения с минимальными затратами полезных ресурсов, например, таких, как: время настройки и проведения соответствующих исследований, электроэнергия и т.п. Это связанно с тем, что классические методы теории управления обладают методами синтеза и проектирования только для хорошо формализованных и хорошо описанных объектов управления, функционирующих в заранее известных условия и ситуациях.
Unexpected and unforeseen control situations on NICA
Objectives on the medium-term prospects
Long Term Concept of a Scientific IT
Intelligent control of RF stations
Intelligent control of the magnetic elements
Irradiation by accelerating beam of superconducting windings of magnetic structure losses during beam transport and transfer between Individual accelerator structures
Quantum intelligent control of polarized particle beam Z^\
Unexpected drawdown of power supply voltage
Abnormal transition of superconducting magnetic optics and structures to normal state
Non-standard losses «id beam Intensity decrease in transient
____ T.^M fifth* Я|-г#!»г*Мг rifiB THMhf н^ Н .-Кило* ____
Failure of control signal delays due to [defects] malfunction and equipment wear
Рис. 11. Нештатные и непредвиденные ситуации управления
Ситуация с достижением устойчивого управления сверхпроводящих ускорительных систем также осложняется следующими обстоятельствами:
-
- эффектом не сохранения постоянства физических свойств ряда систем в течение сеанса работы ускорительного комплекса и, особенно, от сеанса к сеансу, что требует затрат ресурсов на исследование причин и настройку режимов функционирования.
-
- Изменением компоновки ускорителя - замена элементов, реконфигурация и «реинжиниринг» структуры.
-
- Работа с источниками и пучками различных ионов и ядер, что требует исследования и учёта индивидуальных характеристик.
-
- Неизбежная неоднородность полей сверхпроводящих магнитных элементов структуры установки.
Перечисленные обстоятельства и их индивидуальные особенности предопределяют недоопреде-ленность параметров физических и математических моделей и должны учитываться в базах знаний интеллектуальных регуляторов.
Квантовые сквозные ИТ позволяют спроектировать иерархические интеллектуальные системы управления, позволяющие перераспределить степень ответственности принятия решения в зависимости от динамически изменяющейся ситуации управления.
Развитие ИСУ слабоструктурированными объектами управления в проекте NICA на основе ИТ квантовых мягких вычислений
Более 40 лет назад начались попытки применения экспертных систем и нейронных сетей к задачам управления сверхсложными ускорительными установками. Существуют множество решений по автоматизации ускорительной техники. Например, рассматриваются задачи многокритериальной оптимизации конструкции и компоновки самой ускорительной установки (дизайн детекторов), подбора параметров управления ускорителей в различных режимах. Широкое распространением получили «нечеткие» контроллеры с интегрированной базой знаний (БЗ) и системой логического вывода, так называемой интеллектуальной надстройкой, позволяющей оператору адаптировать и обучать управляемую систему. Однако большинство передовых попыток внедрения интеллектуальных технологий являются достаточно обособленными и построены таким образом, что затрудняют их перенос на другие установки ускорительного комплекса и тем более проектирование обобщенной интеллектуальной системы, способной гарантировано достигать целей управления.
Прогресс развития ИТ для управления представленным в работе объектом не стоит на месте и в настоящее время, активно развиваются сквозные квантовые информационные технологии , которые уже получили широкое распространение в таких областях как интеллектуальная робототехника с повышенным уровнем социальной - ответственности (робастные автопилоты), поиск в неструктурированных базах данных (поисковые системы), системы искусственного интеллекта, когнитивные системы управления и диагностики и мн. др.
Развитие данного направления позволило бы апробировать ряд новых типов алгоритмов анализа и обработки данных, зарекомендовавших себя в задачах обучения и робастного управления сложными и слабо формализованными объектами функционирующих в непредвиденных ситуациях. Сам процесс проектирования робастных баз знаний (БЗ) (нейросетевых структур) состоит из двух взаимосвязанных этапов (представлен в Ч.2 статьи), основанных на мягких и квантовых вычислениях (рис. 12 и 13).
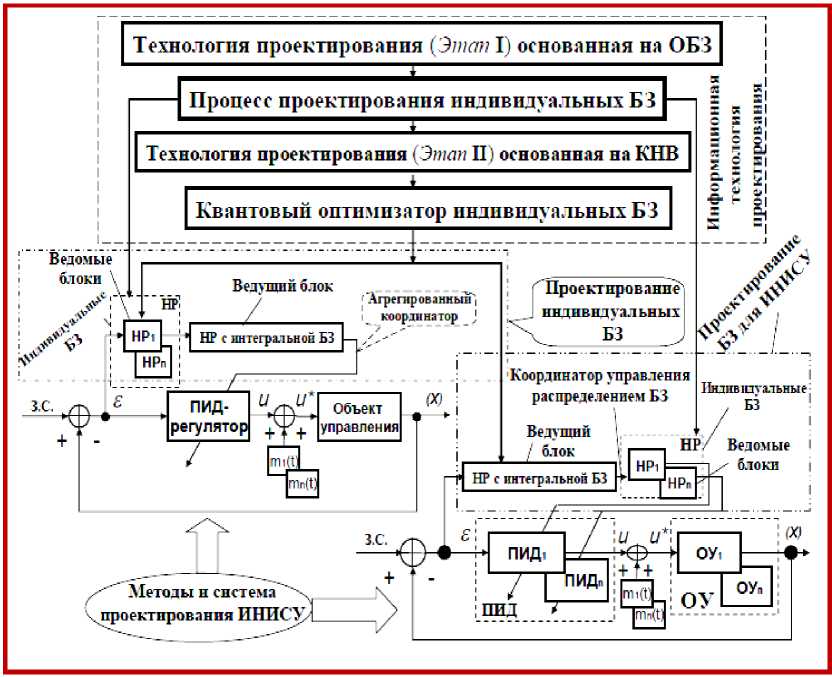
Рис. 12. ИТ проектирования робастных ИСУ
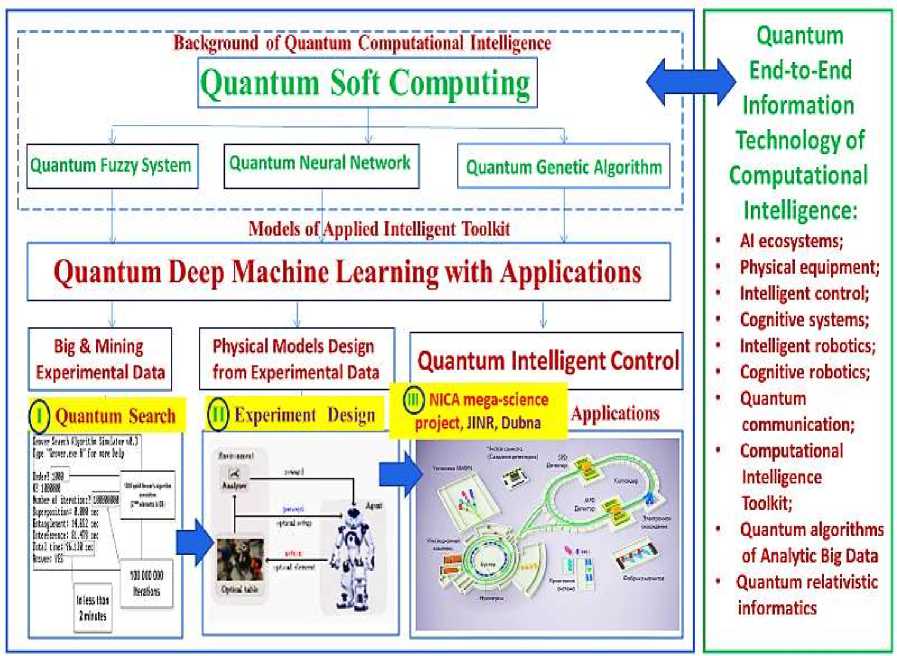
Рис. 13. Структура сквозных квантовых информационных технологий проектирования интеллектуальных систем управления
oaiiiiiiiiiiiHiiH
WOaNIUNll lUmnufVlN
•I AMIN flArWHN
I nHtd Mitts
Petrel Applketion PwltKcalMin • rik *• (> 2oet.n21«$4' Al
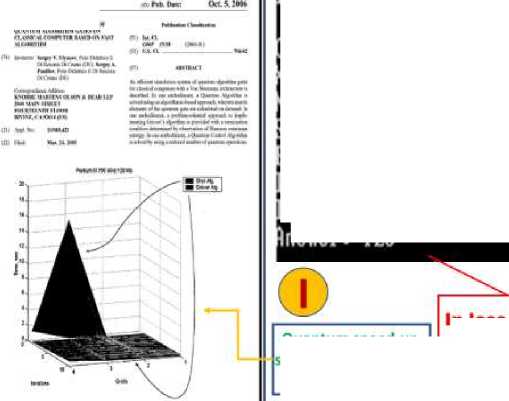
Quantum speed-up search in instructured large DB on GRID IT
)rder? 1000
{? 1000000
timber of iterations? 100000000
Superposition: 0.000 sec Entanglement: 14.652 sec interference: 81.478 sec Total time: 96.130 sec nswer: YES
In less than 2 minutes
EXAMPLE n
Quantum search algorithm
1000 qubit Grover’s algorithm simulation (21000 elements in DB)
100 000 000
Iterations
sw
LITJINR
Рис. 14. Пример эффективности применения квантового поискового алгоритма
Примечание. Квантовый алгоритм поиска реализуется со скоростью ^^, где N - размер мас сива неструктурированных данных, m – количество поисковых маркеров (квантовый эффект – «чем больше ищешь, тем быстрее находишь»; в классических поисковых алгоритмах данный эффект не- возможен. Классический комбинаторный Например, при N = 21000 и m = 2000 т (2-^--1) « 4 • 101598 итераций, а
алгоритм осуществляет в среднем
т ( ^ — 1) итераций.
имеем для итераций поиска классического алгоритма
для квантового алгоритма количество итераций
W=2 1o°° 2^10 3
= V2996 = 2498. Выигрыш от применения квантового алгоритма составляет 2 X 101100раз
меньше итераций поиска. Модифицированный квантовый алгоритм Гровера является основой квантового генетического алгоритма, который в свою очередь встраивается в квантовый нечеткий вывод (know how), что является новым для разработки квантовых поисковых алгоритмов и может быть использовано в процессах обработки больших данных с выделением информативных признаков и формирования по ним кластеров, интеллектуальных СУБД, качестве движка логического вывода в квантовом интернете-вещей и др.
На рис. 15 приведена идеология разработки и применения квантового глубокого машинного обучения на основе когнитивного робота с квантовой нейронной сетью, квантовым генетическим алгоритмом и модифицированным квантовым поисковым алгоритмом Гровера для построения моделей физических процессов.
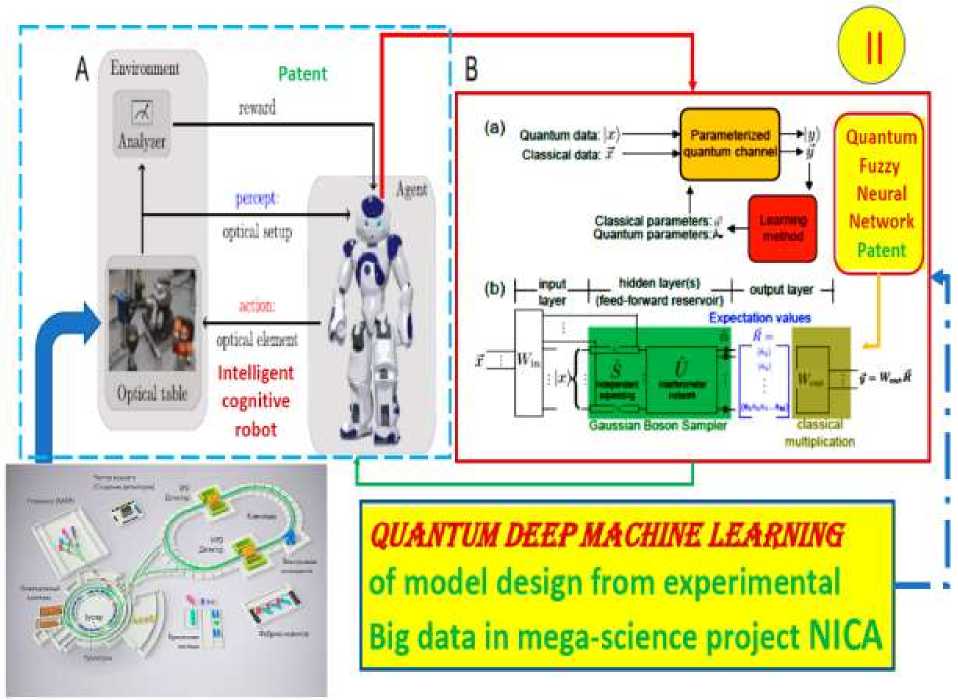
Рис. 15. Технологии квантового искусственного интеллекта и интеллектуальной робототехники в управлении УНК
С точки зрения иерархического мульти-агентного управления, разработанная ИТ позволяет управлять как автономными объектами (отдельными элементами), так и иерархически структурно связанными коллективами автономных элементов. На рис. 12 представлена информационная технология проектирования робастных встраиваемых нечетких интеллектуальных систем управления, включающая алгоритмы квантового поиска в неструктурированных данных, квантового глубокого машинного обучения, на основе квантовых нейронных сетей и квантовых генетических алгоритмов, и квантового интеллектуального управления.
Основной из основных особенностей применения данной технологии является проектирование робастных БЗ для НР, которые обладают свойством самоорганизации знаний, что позволяет извлекать дополнительную полезную информацию и работу в непредвиденные ситуациях управления и гарантированно достигать цели управления.
Заключение
-
- На комплексе NICA развивается широкая программа прикладных исследований и в этих условиях эффективное решение задачи создания интеллектуальной системы управления комплексом NICA подразумевает организационное взаимодействие научно-исследовательских групп ОИЯИ, а также применение современных интеллектуальных вычислений и «робастных» информационных технологий, представляющих собой совокупность методов теории интеллектуального управления, которые обеспечивают хорошее качество управления, даже если объект управления отличается от расчётного или его математическая модель неизвестна.
-
- Необходимость применения Интеллектуальных информационных технологии (ИИТ) обусловлена необходимостью повышения эффективности решения задач автоматического управления комплексом NICA, а именно добавлением свойств адаптации, обучения и самоорганизации с
целью обеспечения устойчивости, повторяемости и надежности требуемых режимов работы -ускорения ионов, их накопления в кольцах коллайдера, поддержание заданных параметров режима столкновений пучков в физическом эксперименте. В приложении 1 представлена таблица основных измерительных и управляющих элементов установки. Анализ этой таблицы показывает, что режимы ручной настройки и управления такой сверх сложной и распределенной системой, потребует развития новых программных инструментариев в набор оператора установки, которые позволили бы уменьшить время настройки системы и повысить эффективность её функционирования.
-
- Система интеллектуального управления комплексом NICA предлагает реализацию двухуровневого управления, где на нижнем уровне осуществляется сбор, обработка и хранение информации для формирования управляющего воздействия на исполнительные устройства ( Tango Controls ), а на верхнем уровне (ИСУ) формируются либо рекомендации операторам, либо непосредственное управляющее воздействие на исполнительные устройства ускорителя NICA .
-
- В частности, необходимо разработать платформу программно-алгоритмической поддержки информационной технологии для процессов моделирования и проектирования робастных самоорганизующихся интеллектуальных системы управление ускорительным комплексом, способных функционировать как в штатных, так и в нештатных ситуациях управления.
-
- Необходимо создать программно-алгоритмический комплекс на основе технологий распределенных вычислений и суперкомпьютинга в рамках задач поиска, сбора и обработки распределенных данных для проектирования самоорганизующихся ИСУ на основе квантовых вычислений и суперкомпьютера "Говорун".
-
- Задача разработки самоорганизующихся ИСУ, способных функционировать и гарантировать достижение цели управления в условиях нештатных ситуаций и информационного риска, является, по мнению авторов, актуальной для комплекса NICA . Такая разработка ИСУ, спроектированной с помощью квантовых информационных технологий, может быть тиражирована, т.к. является одним из актуальных и перспективных направлений повышения надежности и качества управления сложными физическими установками класса « Mega Science ».
Список литературы Необходимость применения интеллектуальных систем управления в экспериментальных ядерно-физических комплексах (типа NICA). Ч. I: проблема нештатных ситуаций
- Kekelidze V. et al. NICA Project at JINR // Part. Nucl. - 2012. - Vol. 9. - No. 4Ä5(174Ä175). - P. 521Ä526.
- Passport of the NICA Accelerator Complex. Functional Requirement Specification. Project NICA/MPD / Ed. by I. Meshkov, G. Trubnikov, A. Sidorin. - Dubna: JINR, 2015.
- Диканский Н. С., Мешков И. Н., Пархомчук В. В., Скринский А. Н. Развитие методов охлаждения ионов // УФН, 2018. - Т. 188. - № 5. - С. 481-492.
- EDN: UQCFJM
- Дрёмин И. М. Некоторые новые открытия на коллайдерах // УФН, 2018. - Т. 188. - № 4. - С. 437-445.
- EDN: XNZMXR
- Агапов Н.Н., Кекелидзе В.Д., Коваленко А.Д., Ледницки Р., Матвеев В.А., Мешков И.Н., Никитин В. А., Потребенников Ю.К., Сорин А.С., Трубников Г.В. Релятивистская ядерная физика в ОИЯИ: от синхрофазотрона к коллайдеру NICA // Успехи Физических Наук, 2016. - Т. 186. - № 4. - С. 405-424.
- EDN: VSJTAH
