Непараметрическая оценка условной плотности распределения вероятности в задаче управления статическим объектом

Автор: Агафонов Евгений Дмитриевич, Смешко Юрий Викторович
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Математика, механика, информатика
Статья в выпуске: 3 (36), 2011 года.
Бесплатный доступ
Рассматривается задача управления нелинейным статическим объектом с использованием вероятностных моделей, основанных на непараметрическом оценивании условной плотности распределения вероятности. Значения входной величины объекта, обеспечивающей желаемое состояние на выходе, определяются в результате оптимизации оценки условной плотности. Предложены подходы к решению задач оптимизации и настройки алгоритма управления.
Вероятностная модель, непараметрическая оценка условной плотности распределения ве- роятности, управление статическим объектом, оптимизация
Короткий адрес: https://sciup.org/148176581
IDR: 148176581 | УДК: 62.503.51
Nonparametric estimation of conventional density in problem of statical object control
The problem of nonlinear static object control using stochastic models based on nonparametric estimation of conventional density distribution is considered. Input variables of an object providing a desirable output are found by optimizing of the conventional density estimation. Some approaches to the optimization problem solution and algorithm adjustment are discussed.
Текст научной статьи Непараметрическая оценка условной плотности распределения вероятности в задаче управления статическим объектом
Описывается один подход к решению задачи управления стохастическим статическим объектом с одним входом и одним выходом. Предполагается, что параметрическая структура модели объекта и законы распределения помех неизвестны. Информация об объекте управления содержится в выборках измерений «вход-выход».
Под управлением понимается процесс выведения объекта в требуемое состояние посредством выбора соответствующего входного воздействия. В классической теории управления, как правило, рассматриваются задачи управления динамическими процессами. Однако на практике достаточно часто встречаются объекты, описание которых в виде системы дифференциальных, интегро-дифференциальных или конечно-разностных уравнений невозможно по тем или иным причинам. Например, такая ситуация может возникнуть из-за несовершенства средств контроля входных и выходных величин, недостатка измерений для анализа «динамики» процесса или сложности описания переходных процессов, происходящих в объекте. В этих случаях исследователь вынужден рассматривать объект как статический с запаздыванием.
Постановка задачи управления предполагает наличие, во-первых, некоторой модели объекта и, во-вторых, цели управления. Анализ задач управления статическим объектом показывает, что основными типами целей управления являются: а) стабилизация выхода объекта, т. е. приближение выхода объекта к желаемому значению с заданной точностью; б) оптимизация выхода объекта, т. е. приближение некоторой скалярной функции выхода к своему минимальному (максимальному) значению с заданной точностью [1]. Формально задачи оптимизации можно свести к задачам стабилизации, и наоборот.
Один из подходов к решению задачи управления статическим объектом предполагает построение так называемой инверсной модели объекта [2]. Например, для объекта с одним входом и одним выходом основной инверсной характеристикой является регрессия. На основе использования непараметрических оценок инверсных регрессий в дальнейшем строятся алгоритмы адаптивного управления при априорной неопределенности.
Однако построенная таким образом инверсная модель не способна учитывать многозначность получаемых характеристик «выход-вход» объекта. На практике зачастую мы имеем дело с неоднозначностью в выборе управляющего входного воздействия, приводящего объект управления к желаемому состоянию. Кроме того, различные альтернативы могут существенно различаться по стоимости или степени целесообразности их реализации. Целью настоящего исследования является повышение эффективности управления статическим объектом, учитывая проблему многозначности характеристик в процессе выбора управляющего воздействия.
Пусть объект управления относится к классу нелинейных статических с одним входом и одним выходом (рис. 1):
Рис. 1. Структурная схема объекта управления
На рисунке приняты следующие обозначения: ОУ - объект управления, и - входная переменная объекта, x - выходная переменная объекта, ^ - случайное воздействие на объект, h x - аддитивная помеха в канале измерения выходной переменной ( M { h x } = 0, D{h x } <^ ).
Имеется выборка статически независимых наблюдений входной и выходной величин { ut , x i },i = 1,2,..., 5 . Требуется решить задачу стабилизации, т. е. найти такое управляющее воздействие, которое приводит к желаемому значению выходную переменную. Таким образом, необходимо по имеющимся априорным сведениям и выборке измерений { u i , x i } отыскать множество { U j }, для которого справедливо x ( U j ) ® x * ,( j = 1,2,...).
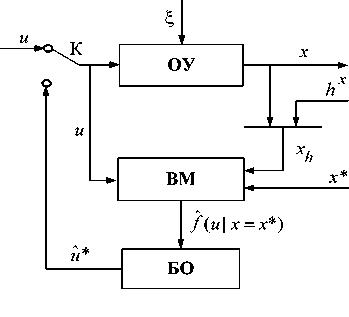
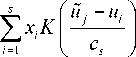
Рис. 2. Структурная схема процесса управления
Для решения поставленной задачи предлагается подход, основанный на построении вероятностной модели объекта, которая может быть получена путем непараметрического оценивания условной плотности распределения вероятности [3]. Затем задача сводится к нахождению мод условного распределения, т. е. наиболее вероятных значений входной переменной при условии фиксированной выходной переменной. В частности, в непрерывном случае необходимо отыскать максимумы условной плотности распределения вероятности. Так как рассматриваются многозначные характеристики, следовательно, желательно оценить все локальные моды оценки условной плотности. Таким образом, искомое множество значений входной величины { uj } определяется в результате решения задачи оптимизации:
f(uu | x = x * ) ^ max. (1)
u
Схематически процесс управления объектом представлен на рис. 2.
f ( u | x = x * )
1 L - к sM c sx
s
Г L к cs» i=1
*
x
xi
c sx
1 L - к sM c sx
x
- x i
)
к
s
L к i =1
x - x i
- к u:^ c c
7 s u V s u
*
x
xi
A
A
7
c s x
u - ui
7
где K ( z ) – ядерная функция, удовлетворяющая следующим условиям:
-
1) к ( z ) <«, V z G к ( z ),
-
2) J к ( z ) dz = 1, (4)
n ( z )
-
3) J к 2( z ) dz <« .
n ( z )
На рисунке к введенным ранее обозначениям добавляются следующие: ВМ – вероятностная модель объекта управления, БО – блок оптимизации построенной оценки, x * – желаемое значение выходной величины, f ( u | x = x *) - оценка условного распределения, u ˆ * – управляющее воздействие, К – переключатель, переводящий систему из режима накопления информации в режим управления.
Условная плотность распределения вероятности f ( u | x ) является наиболее полной характеристикой, устанавливающей связь между случайными величинами X и U . Зная её, можно вычислить любые другие условные характеристики объекта [2; 4; 5]. Условная плотность выражается через безусловные плотности из формулы умножения плотностей:
f ( u | x ) = f ( u , x )/ f ( x ). (2)
В [2; 4] предлагалось заменить безусловные плотности в (2) непараметрическими оценками плотности Розенблатта–Парзена [5; 6]. В результате получаем непараметрическую оценку условной плотности распределения вероятности:
Оценка (3) включает параметры c и c . Пара-ux метр csu определяет ширину диапазона, в котором наиболее вероятно наблюдаются искомые значения входной переменной, при этом варьирование значения csu в широких границах не оказывает существенного влияния на точность получаемых результатов. Параметр отвечает по большей части за «степень размытия» мод непараметрической оценки условной плотности распределения.
Значение c определяет степень «гладкости» x оценки в целом. «Гладкая» оценка облегчает оптимизацию критерия (1), однако при этом может снижаться точность отыскания искомого управления. Чрезмерное сглаживание приводит к исчезновению некоторых существенных локальных максимумов критериальной функции. Вместе с тем csx определяет точность выполнения условия x = x*, поэтому увеличение csx приводит к снижению точности достижения цели управления.
Для обеспечения надежности нахождения решений предлагается осуществить переход от исходной выборки наблюдений входных и выходных величин к новой выборке, заданной в узлах «равномерной сетки» в пространстве входных переменных. Такой переход достижим различными способами, в частности, с применением непараметрической оценки регрессии.
Исходная выборка наблюдений входной и выходной величин обозначается { u i , x i },i = 1,2,..., s . Задаём «равномерную сетку» в пространстве входных переменных с количеством узлов s . Шаг дискретизации для сетки вычисляется следующим образом:
max{ u i } - min{ u i }
A u, = —ii ------; i = 1,2,..., s ; j = 1,2,..., J. (5)
j
s
Вычисляем новые «выборочные» значения
{ U j , x j }, j = 1,2,..., 5 по формулам
U j = min{ u i } + j A u j ;
x ( u j ) = x j
где c5 - оптимальный параметр размытости для непараметрической оценки регрессии, который определяется в процессе оптимизации среднеквадратичного критерия:
s
W ( С ) = - X
5 i = 1
s
X XjK j=1 j * i

xi
j * i
^ min.
c s
плотности, указав границы интервалов, в которых они находятся, а затем применить на каждом интервале один из методов локальной оптимизации.
Локализовать основные моды оценки условной плотности распределения можно с помощью эвристической итерационной поисковой процедуры. Обозначим через [ a g , b g ] границы интервала входной переменной, в котором содержится хотя бы одна мода условной плотности (3). Введем поисковую добавку A , удовлетворяющую следующим условиям:
0 < A < a g , A = 0,005 ■ cSu . Поиск осуществляется с левой границы a g до тех пор, пока a g < b g . На первой итерации ( к = 0) присвоим uk = a g . Левая граница a интервала, в котором содержится один из искомых локальных максимумов, определяется следующим образом.
Если (( f ( uk | x ) = 0 и f ( uk + A | x ) > 0)) ^
^ a = uk ; иначе uk + 1 = uk + A .
Переход к «равномерной сетке» позволяет дополнительно сгладить непараметрическую оценку условной плотности распределения. Однако при реализации такого подхода возникают трудности, связанные с пропуском данных. Особенно эта проблема будет актуальна в условиях малых выборок, когда разрывы между измерениями могут быть значительными. В местах пропуска данных непараметрическая оценка (6) обратится в неопределенность. В некоторых случаях это может повлечь за собой появление новых «ложных» решений, которые помешают достичь заданной цели в процессе управления.
Для преодоления возникших трудностей предлагается представить непараметрическую модель (6) в виде агрегата из двух величин:
M(X | и ) = { x( u ), Q ( и )}, (8)
Поиск правой границы b локального интервала осуществляется с помощью аналогичной итерационной процедуры, начиная с найденной границы a :
Если (( f ( uk | x ) > 0 и f ( uk + A | x ) = 0)
или ( f ( u k — A| x )> f ( u k I x ))
и f ( u k +A| x ) > f ( u k | x ))) ^ b = u k ;
иначе uk + 1 = uk + A .
где x ( u ) - оценка регрессии; Q ( u ) - логическая переменная, которая принимает значение, равное единице, если в окрестности u имеются наблюдения, и, соответственно, ноль, если выборочных данных в окрестности нет. Впервые этот подход рассмотрен в [7; 8].
Непараметрическая оценка регрессии строится на основе исходной выборки в узлах «равномерной сетки». Следовательно, в этих узлах необходимо проверить наличие пропусков выборочных данных. Для этого введем в рассмотрение следующую индикаторную функцию:
После локализации всех максимумов оценки условной плотности распределения на каждом соответствующем интервале применяется один из методов одномерной оптимизации. В результате получаем искомое множество { u j .} значений входной переменной, доставляющее решение задачи стабилизации.
Было предложено использовать оценку производной условной плотности распределения. Непараметрическая оценка производной от условной плотности распределения вероятности будет иметь следующий вид [4]:
f (u | x = x )
K а—Ъ
' С
5du V sdu
A
7
Q ( u ) = <
1 1 V1 \\ u
1, если - X K I —
5 , = 1 I
1 X - k
5^ c
*
x - x i
cs
и I
- 1> 0
0,
s
X K
C 5du i = 1
* x
- xi
. u — ui
c
V 5du 7
иначе.
Важнейший этап решения поставленной задачи -оптимизация многоэкстремального критерия (1). Предполагается, что в одномерном случае возможно локализовать основные максимумы оценки условной
s
X K i=1

Если гарантировать унимодальность оценки условной плотности для каждого локального интервала,
тогда для u , принадлежащего этому интервалу, необходимо решить уравнение с единственным корнем:
‘ *
f ( и | x = x ) = 0 . (13)
Оценка (12) содержит параметр csdu . Параметр csdu определяет ширину диапазона, в котором наиболее вероятно содержится решение уравнения (13), при этом значение csdu в широком диапазоне не оказывает существенного влияния на точность получаемого решения.
Для численного решения уравнения (13) выбран метод Эйлера, в котором стандартная процедура метода была модифицирована добавлением дополнительного уточняющего условия. Вычислительная процедура алгоритма решения уравнения с единственным корнем на локальном интервале [ a , b ] состоит из двух шагов.
На первом шаге вычисляется значение uk+i = uk + gf'(uk | x = x*), (14)
где uk – текущее решение; g – коэффициент, отвечающий за скорость сходимости.
На следующем шаге происходит анализ знака оценки производной:
Если (( f ' ( u k + i | x ) > 0 и f ' ( u k | x ) < 0)
или (f ' ( u k + i | x ) < 0 и f ' ( u k | x ) > 0)) ^ g = 0, 5 - g .
Затем происходит возврат к первому шагу. Условием остановки итерационной процедуры служит достижение заданной точности решения £. В результате выполнения алгоритма для всех найденных ин- тервалов получаем искомое множество {uj} значений входной переменной.
При реализации такого подхода удается достигнуть большей скорости сходимости алгоритма к решению, чем в случае максимизации критериальной функции (1), что становится возможным за счет внедрения дополнительного коэффициента g .
Описанный выше подход к решению задачи стабилизации нелинейного статического объекта был реализован в виде программной системы на языке C++ Builder 6. В представленной реализации алгоритма рассмотрен объект, у которого связь между входной и выходной переменной задана кубической параболой x = 0,005 и 3 - 0,015 и 2 - 1,35 и + 10. Для одномерной оптимизации на локальном интервале был использован метод деления отрезка пополам.
В рабочем окне программы (рис. 3) пользователь может задавать основные параметры алгоритма, закон распределения и дисперсию помехи в канале измерения выходной переменной, а также необходимую точность получаемых результатов.
Алгоритм управления был многократно протестирован при различных параметрах. В качестве показателя надежности ^ алгоритма было принято соответствие количества найденных решений истинному их количеству. По результатам серии экспериментов подтверждение получил тот факт, что ключевым настраиваемым параметром алгоритма является значение коэффициента csx . Критерия для выбора оптимального параметра c не существует, так как поста-x новка задачи предполагает отсутствие вида истинной характеристики объекта управления.
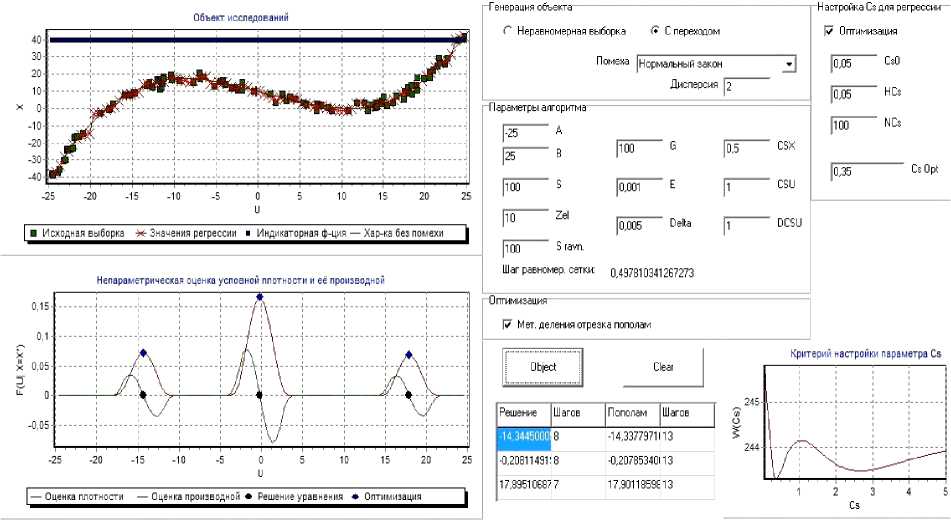
Рис. 3. Рабочее окно программной системы с результатом работы алгоритма
Основное внимание при анализе работоспособности предложенного алгоритма уделялось экспериментам с выборками малых размеров, что является особенно актуальным для использования алгоритма на практике. Вначале алгоритм был протестирован при отсутствии помехи в канале измерения выходной величины. Входное воздействие выбиралось случайным образом на интервале [–25, 25]. Исходная выборка наблюдений за объектом управления была выбрана объемом 5 = 100. После стократного запуска при различных выборках было установлено, что для c5 x < 0,25 надежность работы алгоритма управления V составила ® 60%, а для 0,25 < с, < 5 -100 %. s x
Однако стоит отметить, что при достаточно высоком значении параметра c ухудшается точность найден-x ного решения уравнения (13).
Далее алгоритм управления был протестирован при добавлении значительной помехи в канале измерения выходной переменной: h x = 20 %. По-прежнему рассматривается случай малой выборки исходных наблюдений за объектом. По результатам многочисленных запусков на различных выборках было установлено, что для c5 x < 0,25 надежность V алгоритма < 50 %, для 0,25 < c5 x < 1 - ® 70 %, а если 1 < с5 < 2 - ® 80 % . При увеличении объема исходной выборки до 5 = 200...300 надежность нахождения решений в случае 20%-й помехи составила 100 %.
Проведенные исследования показывают, что преимущество описанного выше алгоритма для решения задачи управления стохастическим статическим объектом заключается в высокой надежности нахождения решений для неоднозначных характеристик при малых объемах выборки и значительной помехи в канале измерения выходной величины. К недостаткам предложенного подхода относится отсутствие критерия для выбора параметра c , который в большей степе-x ни, чем все остальные параметры, отвечает за точность результатов, а также за количество найденных альтернатив при неоднозначности в выборе входного воздействия.
