Непараметрические алгоритмы идентификации и управления для Т-процессов

Автор: Ликсонова Д. И., Раскина А. В.
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Информатика, вычислительная техника и управление
Статья в выпуске: 4 т.22, 2021 года.
Бесплатный доступ
В настоящей работе рассматриваются непараметрические методы идентификации и управления для многомерных дискретно-непрерывных процессов с запаздыванием, присущих многим реальным производствам. Конечно, такие системы типичны для практики, в том числе и в ракетнокосмической отрасли, а также в технологических процессах производства космической техники. Рассматривая многомерные процессы, необходимо учитывать связи между входными и выходными переменными, а также их связи между собой. Причем эти связи не всегда известны исследователю. При учете неизвестных связей входных переменных исследователь будет иметь дело с трубчатыми процессами или Н-моделями, а при учете неизвестных связей выходных переменных модель по тому или иному каналу объекта будет представлять собой аналоги неявных функций. В целом модель многомерного объекта будет представляться в виде системы нелинейных неявных уравнений. В этом случае решение задачи идентификации будет сводиться к нахождению прогноза вектора выходных переменных по известным значениям вектора входных переменных и может быть получено только в результате решения соответствующей системы уравнений, которые были названы Т-моделями, о которых и пойдет речь в настоящей статье. Решение системы нелинейных неявных уравнений параметрическими методами идентификации не приведет к нужному результату из-за отсутствия достаточной априорной информации, вот тут и возникает необходимость в применении непараметрических методов идентификации, а также использовании методов системного анализа. Априорная информация в задачах непараметрической статистики носит недостаточный характер, с чем не могут справиться общепринятые методы идентификации. При управлении многомерными процессами следует учитывать зависимости выходных переменных, в связи с чем возникает еще одна важная особенность, а именно: в качестве задающих воздействий нельзя использовать случайные значения из области определения выходных переменных, их нужно выбирать из их общего пересечения.
Идентификация, управление, многомерный объект, составные вектора, непараметрические алгоритмы
Короткий адрес: https://sciup.org/148323925
IDR: 148323925 | УДК: 519.711.3 | DOI: 10.31772/2712-8970-2021-22-4-600-612
Non-parametric identification and control algorithms for T-processes
In this paper, we consider nonparametric identification and control methods for multidimensional discrete-continuous processes with delay, which are typical for many real industries. Of course, such systems are typical for practice, including in the rocket and space industry, as well as in technological processes for the production of space technology. In multidimensional processes, we must take into account the relationships between input and output variables, as well as their relationship with each other. Moreover, these connections are not always known to the researcher. Taking into account the unknown connections of the input variables, the researcher will deal with tubular processes or H-models, and if the unknown connections of the output variables are taken into account, the model along one or another channel of the object will be analogs of implicit functions. In general, the model of a multidimensional object will be represented as a system of nonlinear implicit equations. In this case, the solution to the identification problem will be reduced to finding the forecast of the vector of output variables from the known values of the vector of input variables and can be obtained only as a result of solving the corresponding system of equations, which were called T-models, which will be discussed in this article. The solution of a system of nonlinear implicit equations by parametric identification methods will not lead to the desired result, due to the lack of sufficient a priori information, this is where the need to use nonparametric identification methods arises, as well as the necessary use of system analysis methods. A priori information in problems of nonparametric statistics is insufficient, which cannot be dealt with by generally accepted identification methods. When managing multidimensional processes, the dependencies of the output variables should be taken into account. Here another important feature arises, which consists in the fact that random values from the range of definition of output variables cannot be used as reference influences, they must be selected from their common intersection.
Текст научной статьи Непараметрические алгоритмы идентификации и управления для Т-процессов
В настоящее время задачи идентификации и управления многомерными дискретнонепрерывными системами с запаздыванием в условиях априорной неопределенности являются достаточно важными [1]. Во многих производствах добычи, переработки и хранения продукции обычно технологи имеют дело с многомерными дискретно-непрерывными процессами. Например, при производстве конвертерной стали происходят сложные физико-химические реакции и поэтому отсутствие адекватной модели может привести к неудачному управлению конвертером, связанному с большим отличием (более 5 %) значений выходных переменных от заданных. В таком случае построение параметрической модели конвертерного производства приведет к проведению большего числа экспериментов и соответственно к многочисленным затратам, в то время как использование непараметрических моделей существенно сокращает затраты и позволяет уменьшить время на создание адекватной модели [2].
Подобные многомерные объекты (процессы) имеют чаще всего зависимости выходных переменных x = (x1,x2,...,xn), стохастически зависимых заранее неизвестным образом (Т-процессы). Это приводит к тому, что математическое описание многомерного объекта будет представлять- ся в виде некоторого аналога системы неявных функций вида Fj (u, x) = 0, j = 1, n , где u = (u1,u2,...,um ) - входные переменные процесса. Основная особенность подобных объектов состоит в том, что класс зависимостей F (•) неизвестен с точностью до параметров. В этом случае классическая теория идентификации не применима. Задача идентификации сводится к задаче решения системы нелинейных уравнений Fj- (u, x) = 0, j = 1, n относительно компонент вектора x = (x1,x2,...,xn) при известных значениях u, x и наличии обучающей выборки (ui, xi, i = 1, s), которая может быть решена при использовании теории непараметрических систем [1]. Подобные задачи ранее не рассматривались [3; 4].
Воспользуемся конкретизацией понятия, связанного с термином «непараметрический», которое было использовано в работах М. Розенблатта и Э. Парзена [5; 6], а также в монографии Ф. П. Тарасенко [7].
«Непараметрическая задача – это статистическая задача, определенная на таких классах распределений, среди которых хотя бы один не сводится к параметрическому семейству функций».
«Непараметрическая задача оценивания неизвестных распределений – это задача нахождения процедуры, с помощью которой можно оценивать непараметризованные распределения из класса, например, всех непрерывных функций распределения или класса распределений, имеющих ряд производных и т. д.».
В настоящей же статье термин «непараметрический» означает отсутствие достаточной априорной информации для представления объекта с точность до параметров.
Исходя из данных определений, можно сказать, что непараметрические методы намного выигрывают в эффективности, если параметрическая модель не описывает адекватно наблюдаемые данные [8].
Задача идентификации
Рассмотрим многомерный процесс, представленный на рис. 1.
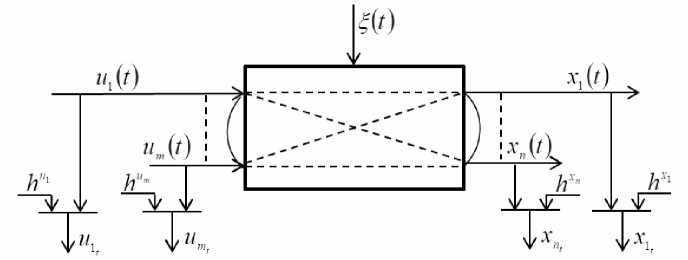
Рис. 1. Многомерный объект
Fig. 1. Multidimensional object
На рис. 1 приведены следующие обозначения: u(t) = (u1 (t),u2 (t),...,uk (t),...,um (t)), k = 1,m - m-мерный вектор входных переменных; x(t) = (x1 (t),x2 (t),...,xj (t),...,xn (t)), j = 1,n - n-мерный вектор выходных переменных, которые принадлежат соответствующим областям: xj eQ j (x); ^(t) - случайные помехи, действующие на объект; hu, hx - случайные помехи измерений соответствующих переменных процесса; пунктирные линии свидетельствуют о наличии зависимости входных и выходных переменных; (t) – непрерывное время; ut,xt – измерения входных и выходных переменных в дискретный момент времени t.
На основании вышеизложенного можно сказать, что многомерные процессы окружают нашу повседневную жизнь и представляют собой процессы, имеющие много входов и выходов, а также связи входных и выходных переменных между собой, связи только между входными переменными [9; 10] и только между выходными. Причем все эти связи не всегда известны исследователю [11], а может также присутствовать разнотипная априорная информация [12]. В вязи с тем, что выходные переменные многомерного процесса связаны между собой, следует отметить и составной (ситуационный) вектор, который был введен Я. З. Цыпкиным в [13]. Составной вектор – это вектор, составленный из входных и выходных переменных. Это может быть любой набор, например x < 3 > = ( и 2 , и 5 , ц 1 , x 4 ) . Составной вектор известен исследователю из априорной информации.
Рассмотрим понятие запаздывания в многомерном объекте. В одном случае запаздывание – это природное свойство объекта (например, это может быть длительность процесса измельчения клинкера для получения цемента). В другом случае, задержка будет связана с дискретностью измерений, например, если выходные характеристики процесса или объекта можно наблюдать только через некоторый период времени. Таким образом, в теории управления запаздывание и задержку следует различать по-разному. Следует учитывать, что задержка может зависеть от аппаратуры и технологии измерения, когда измерения выходных переменных осуществляются в различные промежутки времени, например раз в два часа, раз в смену, раз в сутки и т. д.
Задача идентификации многомерных объектов заключается в построении моделей этих объектов, которые условно можно представить на рис. 2.
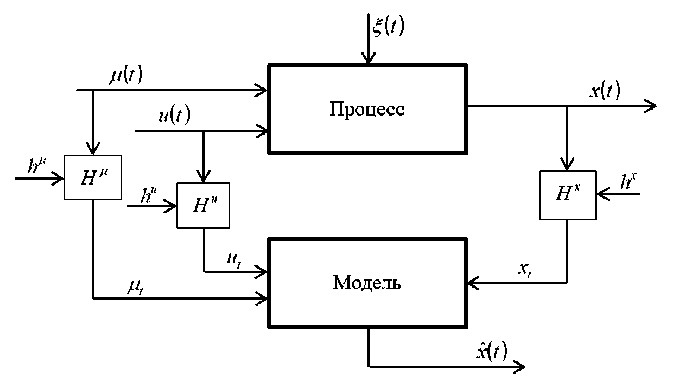
Рис. 2. Многомерный дискретно-непрерывный процесс
Fig. 2. Multidimensional discrete-continuous process
На рис. 2 на вход рассматриваемого процесса поступает вектор входных управляемых переменных и(t) = (и1 (t),...um (t)) e (и) c Rm и вектор входных неуправляемых, но контролируемых переменных ц(t) = (ц1 (t),...Цp (t))е(ц)с Rp, на выходе наблюдается вектор выходных переменных x(t) = (x1 (t),...xn (t)) e(x) c Rn, x(t) - выход модели. Входные и выходные перемен- ные контролируются в дискретные моменты времени через интервал At. Средствами контроля Hu, HЦ, Hx получаем выборку наблюдений или обучающую выборку. В каналах измерения переменных действуют случайные помехи hu, h Ц, hx.
Как было сказано выше, процессы, рассматриваемые в настоящей работе, имеют неизвестные зависимости компонент выходных переменных. Поэтому исследуемый процесс будет описываться системой неявных стохастических уравнений:
F j ( u ( t ) , ц ( t ) , x ( t + т ) , ( t ) ) = 0, j — 1, n ,
где функции F j ( ■ ) не известны, так как не известны зависимости выходных переменных; т - известное запаздыванием по различным каналам изучаемого процесса.
Задача идентификации состоит в построении модели системы, которая представлена на рис. 2, при наличии выборки наблюдений над объектом: u i — ( u i 1 , u i 2, ..., u im ) , Ц i — ( ц i i , Ц i 2 , ..., Ц ip ) , x i — ( x i 1 , x i 2 , ..., x i n ) , i — 1, s .
В этом случае Т-модель процесса с неизвестными зависимостями компонент вектора выходных переменных будет рассматриваться в виде системы:
F j ( u < j > , Ц < j > , x < j > , u s , Ц s , x s ) — 0, j — 1, n ,
где u < j > , ц < j > , x < j > - составные векторы, us , Ц s , xs - временные векторы (т. е. набор данных, которые поступили к s -му моменту времени).
В результате измерения входных и выходных переменных может быть получена обучающая выборка ui —(ui1, ui2, ..., um), Цi — (цп, Цi2, ..., цip), xi —(xn, x^, ..., xn), i — 1,s, которая используется при построении модели многомерного объекта. Так как входные воздействия u заданы и известны, то решаем систему (2) и получаем оценки xj компонент вектора выходных переменных xj при соответствующих значениях входных воздействий u . Здесь естественно воспользуемся методами непараметрического оценивания [14].
Для начала подставляем l -е поступление входных переменных ul — ( ul 1 , ..., ulm ) , l — 1, s , где s - объем обучающей выборки, в формулу (2). Далее подставляем выходные переменные из обучающей выборки x i — ( x i 1 , ..., xin ) для определения невязок е i , i — 1, s . Невязки e i , i — 1, s вычисляются по следующей формуле:
e j — f j ( u < j > , Ц < j > , x < j > , u s , Ц s , x s ) , j — 1, n ,
где функции f j ( ■ ) принимаются в виде разницы между измеренными значениями компонент выхода и их оценками [15]:
е j
( i ) — x j ( i ) -
s < m > r-iA< Р >
X j i 1 П Ф u f i1 П Ф " Ц i 1
i — 1 k — 1 у c su k J v— 1 у c s цу 2
s < m > Р >
хпФ uk-^^ пФ
i — 1 k — 1 у c su k J v— 1 у
Ц^-Цу[ i1Л — cs Цу J
j — 1, n ,
где < m > - размерность составного вектора uk , < m >< m . Далее оцениваем условное математическое ожидание
X j = M { X j I u < j > , Ц < j > , e = 0 } , j = 1, n ,
и в конечном итоге прогноз для каждой компоненты вектора выходных переменных будет выглядеть следующим образом:
^
x j =
x < m > Г11А< p > n >
2 х , и - П Ф 1 uk 1 [ i 1 П Ф "' ' i 1 П Ф ^
i = 1 k 1 = 1 V c su J v i = 1 V c s ц J k 2 = 1 V c s e J
t П■ Ф [ u 11^ ^
i = 1 k 1 = 1 V c su J V 1 = 1 V
Ц v 1 ^i 1 ^ П Ф e i 1 '
c s ц J k 2 = 1 V c s e J
j = 1, n,
где в качестве колоколообразных функций Ф ( - ) были приняты функции различных типов и коэффициенты csu , cs ц , cs e удовлетворяли условиям сходимости [16].
Оценка (6) и является прогнозом выходных переменных x при известных входных u .
Задача управления
Рассмотрим многомерный объект – блок-схему с запаздыванием, общая схема управления которого представлена на рис. 3.
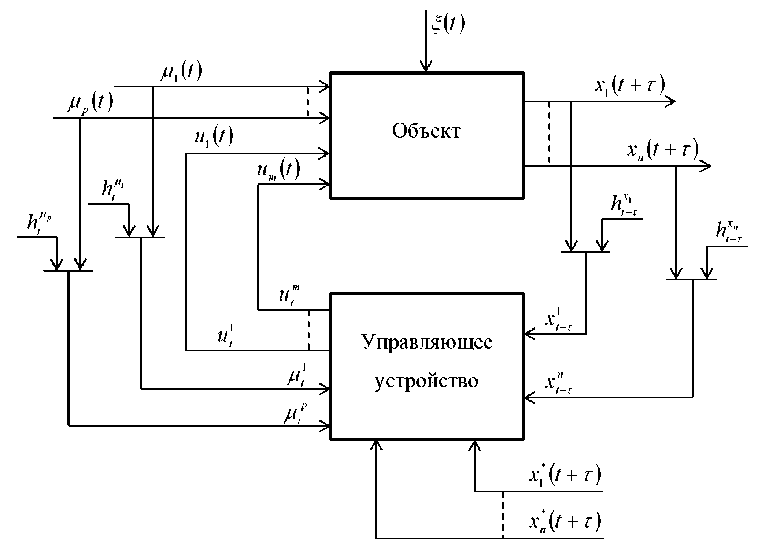
Рис. 3. Схема непараметрической системы управления объектом с запаздыванием
Fig. 3. Scheme of a nonparametric control system for an object with delay
На рис. 3 приняты следующие обозначения: u(t) = (u1 (t), ..., um (t)) - управляемые входные переменные; ц(t) = (ц1 (t), ..., цp (t)) - неуправляемые, но контролируемые входные перемен ные; x(t + т) = (x1 (t + т), ..., xn(t + т))еRn - выходные переменные процесса; x*(t + т) = (x*(t + т), ..., xn*(t + т))еRn - задающие воздействия; ^t, ЬЦ, hX - случайные стационарные помехи, действующие на объект и в каналах измерения входных и выходных пере- менных; т - запаздывание по различным каналам многомерной системы. Запаздывание т известно по всем каналам многомерной системы, и в данном случае является одинаковым для каждой компоненты вектора выходных переменных.
Если принимать во внимание, что выходные переменные многомерного Т-процесса стохастически связаны между собой, то определение задающих воздействий для такой системы приобретает некоторое отличие. Так как выходные переменные связаны, то общее пересечение они имеют в некоторой области Q j (Xj), но не всегда все выходные переменные будут пересекаться в одной области. В том случае если эта область Q j (xj) существует, то задающие воздейст- вия необходимо выбирать только из этой области, в противном случае управление такой системой не представляется возможным. В случае если такой области нет, то управлять такой системой бесполезно. При этом приведем систему управления многомерным объектом, в которой рассмотрим систему взаимосвязанных задающих воздействий (рис. 4).
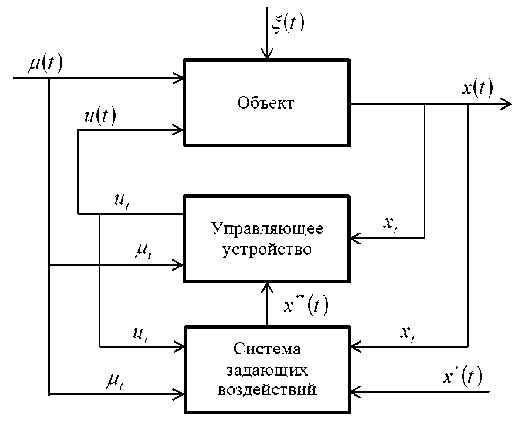
Рис. 4. Схема непараметрической системы управления с дополнительным блоком
Fig. 4. Diagram of a nonparametric control system with an additional block
Рис. 4 в отличие от рис. 3 дополнен блоком формирования задающих воздействий для их определения. На рис. 4 приняты следующие обозначения: x * ( t ) - исходные значения задающих воздействий; x ** ( t ) - задающие воздействия, которые необходимо найти из системы уравнений
Fj(u
Пусть имеется обучающая выборка (ul, pi, xi, i = 1,s). В конкретный момент времени t на вход поступают неуправляемые, но контролируемые переменные pt, при этом управляющие воздействия ut и выходные переменные xt пока неизвестны. Далее из всей первоначальной выборки (ui, pi, xi, i = 1, s) выбираются те строки, в которых значения pi наиболее близки к вновь поступившим значениям pt, и из этих строк формируется новая выборка. Задающие воздействия x * * находятся из новой сформированной выборки x ** е A (Xj), а именно из решения системы (7). Решение системы (7) сводится к последовательности алгоритмов, изложенной ниже.
Для задающего воздействия X * берем произвольные значения из области Q , ( X 1 ) . Вторую переменную х 2 * определяем с учетом выбранной компоненты x* из следующего выражения:
X *”
s 1
Е х 2 Ф i=1
i
X 1 - X 1
< m >
П Ф к=1
i uk uk
V cuk
s 1
Е ф i =1
i
X 1 - X 1

< m >
П Ф к=1
u k - u k
где $ 1 cfi ( X 1 ) , т. е. суммирование проводится не по всей первоначальной выборке, а только по тем значениям, которые были наиболее близки к вновь поступившим значениям ц t.
В общем виде алгоритм принимает следующий вид:
** $ xj
$ j - i j - 1
Е X i П i = 1 j = 1
x
x

< m >
П Ф k=1
i uk- uk
V c u k
A< p>( i
П
J v= 1 V c ц
$ j - 1 j - 1
ЕП
** i
Xj - Xj cxj
< m >
П Ф
J k = 1
i uk- uk
V cuk
A < p > ( i
П '
J v= 1 V c $ ц
После определения задающих воздействий можно приступать к нахождению прогнозных значений управляющих воздействий для многомерной системы. Для этого воспользуемся следующим непараметрическим алгоритмом. Входную переменную и 1 ( t ) берем произвольно из области Q ( и 1 ) . Входная переменная u 2 ( t ) может быть определена в соответствии со следующим алгоритмом:
и 2 =
s
Е и 2 ф
V
u 1 - u 1 ^ П ф c U 1 J j =1
i
Ц у - ц V
s
Е Ф i=1
u 1 - u 1 J fr Ф c U 1 J j =1
x
**
x ij

p
П Ф
V=1
Цу -ц V ^
V C Ц v J
где ( u i , ц i , X i , i = 1, $ ) - обучающая выборка; ц у - поступившие входные неуправляемые, но контролируемые переменные.
Для входной переменной и 3 ( t ) алгоритм управления будет выглядеть следующим образом:
и з —
si
U] - U]
и3Ф 1
i = 1 V c u 1
i
Ф u iz u !
c u 2
ПФ
J j = 1 V
i цу -цv
С ц у j
s
Е ф i=1
i
U 1 - U 1
Ф
u 2
-
i ^ u 2
V
c u 1
V
c u 2
J
П [ r“ _ Y i ) P
П Ф XjTJX1- П Ф j = 1 V cX j J v = 1 V
i ц у -ц v
С ц у j
и так далее для каждой компоненты входа и ( t ) объекта. В общем виде для многомерной системы алгоритм управления будет выглядеть следующим образом:
s
k - 1
Z uk П Ф
uk uk
x
^^^^^^^B
x
k
s
i = 1
k = 1
cu k
c
: • p
j ПФ
v= 1
k v
к
^^^^^^^B
i ^ k v
c
k v
x k - 1
uk uk
x
••
^^^^^^^B
x
i = 1 k = 1
c uk
c
: . p г П Ф
v= 1
k v
^^^^^^^B
i
Ц у
k = 1, m .
к
c
k v
В реальных задачах часто число компонент вектора входных переменных u больше числа компонент вектора выходных переменных x . В этом случае в число компонент вектора ц включают компоненты вектора u ,, с тем, чтобы размерность вектора u и x сделать одинаковой.
Настраиваемыми параметрами будут параметры размытости cu , cx и с , для них можно k j * v использовать следующие формулы: cuk =а |uk - u*k |, cxj = в| x * * - xj| и c*v = y|*v -Ц v |, где а, в и y некоторые параметры большие 1, а > 1, в > 1, y > 1. Следует заметить, что выбор c , cx. и kj с осуществляется на каждом такте управления. При этом если сначала определен cu , то оп-kv k ределение cxj и сkv осуществляется с учетом этого факта. Однако может быть и наоборот, например, сначала определяется cxj. или сkv, а потом остальные.
Вычислительные эксперименты
Для примера был взят объект с 4-мя входными переменными u ( t ) = ( u 1 ( t ) , u 2 ( t ) , u 3 ( t ) , u 4 ( t ) ) и тремя выходными переменными x ( t ) = ( x 1 ( t ) , x 2 ( t ) , x 3 ( t ) ) . Подобные объекты характерны для реальных производств, например, для производства цемента, нефтепереработки, металлургии и т. д., где протекают только многомерные процессы. Для данного объекта была сформирована выборка входных и выходных переменных и найдены прогнозируемые значения выходных переменных при известных входных с использованием алгоритма (4) и (6). Для вычисления использовался объем выборки s = 1000, параметры размытости csu = 0,4; cs £ = 0,2, помеха, действующая на компоненты вектора выходных переменных а = 0,1 , запаздывание т = 2 такта (где 1 такт равен 1 минуте либо иной). Описание объекта с точностью до параметров было принято только для проведения компьютерного исследования и оставалось неизвестным для изложенной выше теории. Представим полученные результаты для третьей компоненты выхода многомерного объекта.
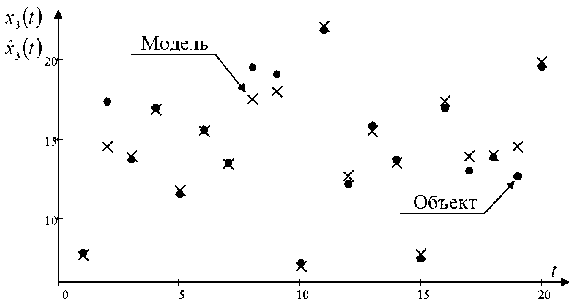
Рис. 5. Прогноз выходной переменой x 3 ( t ) объекта, измеренный с равномерной помехой 10 %, 5 3 = 0,07
Fig. 5. The predicted output variable x 3 ( t ) of the object, measured with a uniform noise of 10 %, 5 3 = 0,07
На рис. 5 представлены полученные прогнозируемые значения x 3 ( t ) для третьей компоненты выхода x 3 ( t ) . Погрешности определения переменных обусловлены наличием помех. Как видно из рис. 5, прогноз значений выходных переменных x 3 ( t ) многомерного объекта по известным входным переменным u ( t ) с учетом 10 % помехи достаточно удовлетворителен с точки зрения многих задач практики (например, процесс измельчения клинкера). Обратим еще раз внимание на то, что исследователю неизвестен вид системы уравнений, описывающий управляемый объект. В качестве информации о последнем используются измерения входных и выходных переменных ( и1 , ц i , x i , i = 1, s ) .
Далее приводятся результаты вычислительных экспериментов для данного объекта для первой компоненты выхода при использовании алгоритма управления (12). В данном вычислительном эксперименте число компонент вектора u больше числа компонент вектора х . Если же размерность вектора u превышает размерность вектора х , т. е. m > n , то сделаем замену: и 4 ( t ) ^Ц 1 ( t ) , чтобы размерность вектора и и x сделать одинаковой. Далее значения задающих воздействий x** ( t ) , которые были найдены при помощи алгоритма (9), представим в виде ступенчатой функции, как показано на рис. 6.
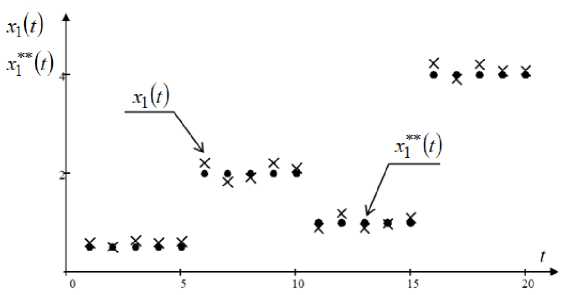
Рис. 6. Зависимость выхода объекта x 1 ( t ) от задающего воздействия x ** ( t )
Fig. 6. Dependence of the output of the object x 1 ( t ) on the setting action x ** ( t )
Как видно из рис. 6, выход объекта x 1 ( t ) достаточно близок к задающему воздействию x ** ( t ) при наличии 10 % помехи и не превышает 1,7 % от значений x ** ( t ) , что удовлетворяет большинству практических задач.
Таким образом, непараметрический алгоритм управления многомерным объектом со стохастически зависимыми выходными переменными x ( t ) показывает достаточно точные результаты с точки зрения многих практических задач.
Заключение
В настоящей статье рассматриваются задачи идентификации и управления многомерным объектом в условиях неполной информации об объекте исследования, т. е. в условиях, когда параметрическая модель процесса не определена. Такие многомерные объекты часто встречаются на практике, например в металлургии, энергетике, нефтепереработки и в других отраслях. Отличительная особенность моделей этих объектов и алгоритмов от известных состоит в том, что задачи ставятся в условиях непараметрической неопределенности, т. е. в условиях, когда многомерная система не описывается с точностью до вектора параметров из-за недостатка априорных данных.
Еще основной особенностью является то, что и при задаче идентификации и задаче управления вводятся последовательности непараметрических алгоритмов. Сущность непараметрических алгоритмов идентификации и управления состоит в том, что для задачи идентификации прогноз выстраивается как условное математическое ожидание компонент вектора выходных переменных x ( t ) при известных компонентах входных u ( t ) , а при управлении - как условное математическое ожидание входных переменных u ( t ) при найденных задающих воздействиях x "(t ) .
Исходя из полученных прогнозируемых значений в вычислительном эксперименте, в процессе использования непараметрических алгоритмов, получаются достаточно хорошие с практической точки зрения результаты, которые можно использовать и при решении реальных задач на производствах [17].
Список литературы Непараметрические алгоритмы идентификации и управления для Т-процессов
- Медведев А. В. Основы теории непараметрических систем. Красноярск : СибГУ им. М. Ф. Решетнева, 2018. 727 с.
- Васильев В. А., Добровидов А. В., Кошкин Г. М. Непараметрическое оценивание функционалов от распределений стационарных последовательностей. М. : Наука, 2004. 508 с.
- Методы классической и современной теории автоматического управления: в 5 т. Т. 1: Математические модели, динамические характеристики и анализ систем управления / под. ред. К. А. Пупкова, Н. Д. Егупова. М. : МГТУ им. Н. Э. Баумана, 2004. 748 с.
- Методы классической и современной теории автоматического управления: в 5 т. Т. 2: Статистическая динамика и идентификация систем автоматического управления / под. ред. К. А. Пупкова, Н. Д. Егупова. М. : МГТУ им. Н.Э. Баумана, 2004. 640 с.
- Rozenblatt M. Remarks on some nonparametric estimates of density function // Ann. Math. Statist. 1956. Vol. 27. P. 832-837.
- Parzen E. On estimation of probability density function and mode // Ann. Math. Statist. 1962. Vol. 33. № 3. P. 1065-1076.
- Тарасенко Ф. П. Непараметрическая статистика. Томск : Изд-во Том. ун-та, 1976. 292 с.
- Кошкин Г. М., Пивен И. Г. Непараметрическая идентификация стохастических объектов. Хабаровск : РАН Дальневосточное отделение, 2009. 336 с.
- Медведев А. В. Н-модели для безынерционных систем с запаздыванием // Вестник Сиб-ГАУ. 2012. № 5 (45). С. 84-89.
- Medvedev A. V., Mihov E. D., Nepomnyashchiy O.V . Mathematical modeling of H-processes // Журнал Сибирского федерального ун-та. Сер. «Математика и физика». 2016. Т. 9, № 3. С.338-346.
- Медведев А. В., Ярещенко Д. И. Непараметрические алгоритмы идентификации и управления многомерными безынерционными процессами // Вестник Томского гос. ун-та. Управление, вычислительная техника и информатика. 2020. № 53. С. 72-81.
- Медведев А. В. Теория непараметрических систем. К-модели // Вестник СибГАУ. 2011. № 3 (36). С. 57-62.
- Цыпкин Я. З. Адаптация и обучение в автоматических системах. М. : Наука, 1968. 399 с.
- Терешина А. В., Ярещенко Д. И. О непараметрическом моделировании безынерционных систем с запаздыванием // Сибирский журнал науки и технологий. 2018. Т. 19, № 3. С. 452-461.
- Хардле В. Прикладная непараметрическая регрессия. М. : Мир, 1993. 349 с.
- Надарая Э. А. Замечания о непараметрических оценках плотности вероятности и кривой регрессии // Теория вероятностей и ее применение. 1970. Т. 15, вып. 1. С. 139-142.
- Прогнозная модель процесса каталитической гидродепарафинизации в условиях недостатка априорных сведений / Е. Д. Агафонов, А. В. Медведев, Н. Ф. Орловская и др. // Изв. ТулГУ. 2018. № 9. С. 456-468.
