Непараметрические многошаговые алгоритмы моделирования и управления многомерными безынерционными системами

Автор: Ярещенко Д.И.
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Информатика, вычислительная техника и управление
Статья в выпуске: 2 т.21, 2020 года.
Бесплатный доступ
В настоящей статье рассматриваются новые классы моделей многомерных безынерционных систем с запаздыванием в условиях недостатка априорной информации. Речь идет о многомерных дискретно-непрерывных процессах, компоненты вектора выходных переменных которых стохастически зависимы заранее неизвестным образом. Но также существуют процессы, по некоторым каналам которых априорная информация соответствует одновременно как параметрическому, так и непараметрическому типу исходных данных об исследуемом процессе. Математическое описание подобных процессов приводит к системе неявных нелинейных уравнений, одни из которых будут неизвестны, а другие известны с точностью до вектора параметров. Основное назначение модели объекта, имеющего стохастические зависимости выходных переменных, состоит в нахождении прогноза выходных переменных при известных входных. Для нахождения прогнозных значений выходных переменных по известным входным необходимо решить систему неявных нелинейных уравнений. И тут возникает странная ситуация, так как необходимо решить систему, которая на самом деле неизвестна, но могут быть лишь известны уравнения по некоторым каналам многомерной системы. Таким образом, возникает довольно нетривиальная ситуация решения системы неявных нелинейных уравнений в условиях, когда по одним каналам многомерной системы самих уравнений в обычном смысле нет, а по другим они известны с точностью до параметров. Поэтому модель объекта не может быть построена с помощью методов существующей теории идентификации в результате недостатка априорной информации. Основным содержанием настоящей работы является решение задачи идентификации при наличии частично-параметризованного дискретно-непрерывного процесса и при том, что этап параметризации не может быть преодолен без дополнительной априорной информации об исследуемом процессе. Алгоритм управления многомерными процессами с зависимыми выходными переменными представляет собой последовательную многошаговую алгоритмическую цепочку, позволяющую найти управляющее воздействие и привести объект в желаемое состояние. Вычислительные эксперименты по исследованию предлагаемых моделей и по управлению многомерными дискретно-непрерывными процессами показали достаточно удовлетворительные результаты. В статье приводятся результаты вычислительных экспериментов, иллюстрирующих эффективность предлагаемой технологии прогноза значений выходных переменных по известным входным, а также по управлению данными процессами. (Русскоязычная версия представлена по адресу https://vestnik.sibsau.ru/articles/?id=677)
Многомерный дискретно-непрерывный процесс, идентификация, управление, т-модели, кт-модели
Короткий адрес: https://sciup.org/148321968
IDR: 148321968 | УДК: 519.711.3 | DOI: 10.31772/2587-6066-2020-21-2-215-223
Non-parametric multi-step algorithms for modeling and control of multi-dimensional inertia-free systems
The paper discusses new classes of models of multidimensional inertia-free systems with a delay in the conditions of a lack of a priori information. The subject is multidimensional discrete-continuous processes, the components of the vector of output variables of which are stochastically dependent in an unknown way. There are also processes, through some channels of which aprior information corresponds simultaneously to both the parametric and nonparametric type of source data about the studied process. The mathematical description of such processes leads to a system of implicit nonlinear equations, some of which will be unknown, while others will be known with accuracy to the parameter vector. The main purpose of a model of an object having stochastic dependencies of output variables is to find a forecast of output variables with known input variables. To find the predicted values of the output variables from known inputs, it is necessary to solve a system of implicit nonlinear equations. The problem is to solve a system that is actually unknown, when only equations for some channels of a multidimensional system are known. Thus, a rather nontrivial situation arises when solving a system of implicit nonlinear equations under conditions when, in one channel of a multidimensional system, the equations themselves are not in the usual sense, and in others they are known accurate to parameters. Therefore, an object model cannot be constructed using the methods of the existing identification theory because of a lack of aprior information. The purpose of this work is the solution of the identification problem in the presence of a partially-parameterized discrete-continuous process, and despite the fact that the parameterization stage cannot be overcome without additional priori information about the process under study. The control algorithm for multidimensional processes with dependencies of output variables is a sequential multi-step algorithmic chain that allows finding the control action and bring the object to the desired state. Computational experiments to study the proposed models and to control multidimensional discrete-continuous processes have shown quite satisfactory results. The article presents the results of computational experiments illustrating the effectiveness of the proposed technology for predicting the values of output variables from known input variables, as well as for managing these processes.
Текст научной статьи Непараметрические многошаговые алгоритмы моделирования и управления многомерными безынерционными системами
Введение. Рассмотрение и изучение многомерных безынерционных процессов с запаздыванием, имеющих стохастическую зависимость выходных переменных, является сравнительно актуальной задачей, так как подобные процессы характерны для многих востребованных отраслей промышленности, например, в металлургии (плавка стали), стройиндустрии (производство цемента), энергетике (горение угля), нефтепереработке (повышение хладотекучести дизельного топлива) [1], а также в активных системах, таких как образовательный процесс (приобретение знаний студентами университетов) [2]. Для данных процессов характерным является отсутствие необходимой априорной информации. Исследователю, находящемуся в таких условиях, необходимо моделировать и управлять подобными многомерными дискретно-непрерывными процессами. Эти процессы динамические по своей природе, но контролируемые через дискретные интервалы времени, в том числе различные. Безынерционные системы рассматриваются с известными запаздываниями, например, когда постоянная времени объекта составляет 5–10 мин., а контроль выходной переменной измеряется раз в два часа. Это приводит к зависимости выходных переменных, например, при производстве цемента основной показатель на выходе - активность цемента (прочность при сжатии) зависит от другого показателя выхода -тонкости помола.
Процессы, у которых наблюдалась стохастическая зависимость выходных переменных, были отнесены к Т-процессам [3]. Главное здесь состоит в том, что идентификация подобных объектов должна осуществляться не традиционным для существующей теории идентификации путем [4]. Здесь также возникают случаи, когда априорная информация соответствует одновременно как непараметрическому, так и параметрическому типу исходных данных об исследуемом процессе. Такие процессы были отнесены к КТ-процессам [3].
Главной особенностью Т-процессов и КТ-процессов является то, что математическое описание объекта представляется в виде некоторого аналога системы с частично параметризованными функциями F .( u , x , а ) = 0, j = 1, n и неизвестными функциями вида Fj ( u , x ) = 0, j = 1, n . Таким образом, задача идентификации сводится к задаче решения системы нелинейных уравнений частично-параметризованного дискретно-непрерывного процесса относительно компонент вектора x = ( xx , x 2,..., xn ) при известных значениях входных переменных u = ( ux , u 2,..., um ) . Конкретные задачи идентификации будут отличаться различными объемами априорной информации по различным каналам многомерного процесса, особенностью их протекания. Здесь стоит отметить, что приходится сталкиваться с системой разнотипных, с точки зрения математики, уравнений, решение которых будет требовать развития специальных методов [5]. В этом случае целесообразно использовать теорию непараметрических систем [6; 7].
Процессы, имеющие стохастическую зависимость выходных переменных. Как было отмечено ранее, Т-процессы - это многомерные безынерционные процессы, имеющие стохастическую зависимость выходных переменных. Рассмотрим на рис. 1 исследуемую многомерную систему, реализующую Т-процесс.
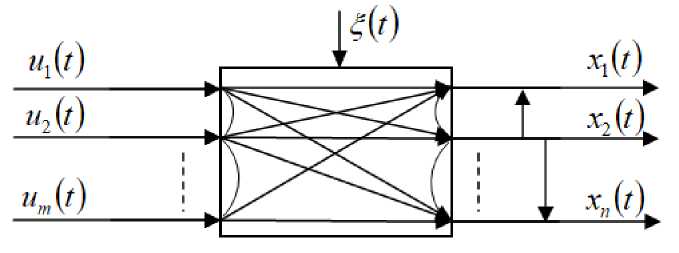
Рис. 1. Многомерная система, реализующая Т-процесс
Fig. 1. The multidimensional system that implements the T-process
На рис. 1 приняты следующие обозначения: u = ( ux ,..., ит ) - m -мерный вектор входных переменных, x = ( x ,,..., xn ) - n -мерный вектор выходных переменных, ^ ( t ) - случайные помехи, действующие на процесс. Вертикальные стрелки на выходных переменных показывают их зависимости. По различным каналам многомерного процесса зависимость j -ой компоненты вектора x может быть представлена в виде некоторой зависимости от тех или иных компонент вектора u : x < j > = f ( ц .< j > ) j = 1, n . Подобные функции определяет исследователь на основании имеющейся априорной информации. Такие соотношения называются составным вектором. Составной вектор это вектор, составленный из некоторых компонент входных и выходных переменных, в частности, это может быть любой набор, например x < 5 > = ( u 2, u 5, u 7, u8 ) , x < 6 > = (u8 , u , u 7, x^ ) [8].
Математическое описание объе кт а представляется в виде некоторой системы неявных функций вида F j ( u ( t ), x ( t )) = 0, j = 1, n . Задача идентификации сводится к задаче решения системы нелинейных уравнений
F j ( u ( t ), x ( t )) = 0, j = 1, n (1)
относительно компонент вектора x при известных значениях входных переменных u .
Заметим, что вид уравнений F ( • ) , j = 1, n продолжает оставаться неизвестным и не может интерпретироваться как модель исследуемого процесса. Задача состоит в моделировании подобных процессов, т. е. Т-процессов.
Частично-параметризованные многомерные процессы. Частично-параметризованные многомерные КТ-процессы отличаются от Т-процессов тем, что у них по некоторым каналам априорная информация может соответствовать параметрическому типу, а по другим – непараметрическому.
Особенностью идентификации многомерного объекта является то, что исследуемый процесс описывается системой неявных стохастических уравнений вида
F j ( u ( t ) , x ( t + t ), ^ ( t ) ) = 0, j = 1, n , (2)
где по некоторым каналам функции F y ( • ) - не известны, а по другим каналам известны, t -запаздывание по различным каналам многомерной системы [3]. В дальнейшем, из соображений простоты, т будет опущено путем сдвига значений в матрице наблюдений на величину т .
В этом случае система уравнений примет вид
F (u < j > , x < j > , a ) = 0,
F 2 ( u < j > , x < j > , a ) = 0, _
« ... j = 1, n , (3)
F n - i ( u j , x < j > ) = 0,
_ F n ( u < j > , x < j > ) = 0.
где F3 ( • ) частично параметризованы либо неизвестны, а - вектор параметров.
Моделирование многомерных безынерционных процессов. Многомерные КТ-модели объединяют в себе Т-модели и К-модели и представляют собой модель, в которой есть совокупность взаимосвязей входных и выходных переменных, причем по одним каналам они известны, например, ориентируясь на известные законы физики, а по другим каналам такие зависимости неизвестны, т. е. наличие априорной информации по различным каналам многомерного объекта соответствует как параметрическому, так и непараметрическому типу исходных данных. Поэтому представим систему моделей в следующем виде:
Fx (u < j > , x < j > , а ) = 0;
F
2
u <
j
>
,
x
«... j = 1, n ,
Fn — I ( u < j > , x < j > , x s , u s ) = 0;
_ F n ( u < j > , x < j > , x s , u s ) = 0.
где
xs
,
us
- временные векторы (набор данных, поступивший к s-му моменту времени),
u
Задача идентификации сводится к тому, что при заданных значениях вектора входных переменных u необходимо решить систему (4) относительно вектора выходных переменных x . По некоторым каналам многомерной системы, по которым известны уравнения с точностью до параметров, коэффициенты находятся, например, методом стохастических аппроксимаций или методом наименьших квадратов [9; 10]. По остальным каналам, где неизвестны уравнения с точностью до вектора параметров, необходимо применить следующую двушаговую алгоритмическую цепочку [3], которая позволит найти прогнозные значения вектора выходных переменных по известным входным. На первом шаге вычисляются невязки по следующей формуле:
£ ц = F j ( u < j > , x < j > ( i ) , x s , u s ), j = 1, n ,
где F ( u < j > , x < j > (i ), :xs , Hs ) принимаются в виде непараметрической оценки функции регрессии
Надарая - Ватсона [11]:
£ ,■ ( i ) = F i j ( u < j > , x J ( i ) ) = xj ( i )-
s < m >
E x j [fl O ф i = 1 k = 1 ^
u k - u k [ i ]
s < m > (
ЕПф i=1 k=1 ^
c su k у
uk - u k [ i ] '
c suk у
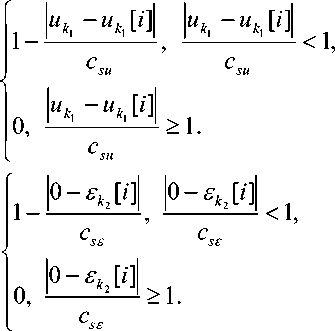
где j = 1, n, , < m > - размерность составного вектора uk, далее это обозначение используется и для других переменных. Причем размерность составного вектора может быть различной для разных каналов. Колоколообразные функции Ф(■) и параметр размытости c удовлетворяют некоторым условиям сходимости и обладают следующими свойствами [12]:
Ф0<<» ;lims ,„ cs = 0; J Ф cu (uk - uk [ i ]%u = 1;(7)
Q ( u )
lims ,, <Ф(c-1t(uk -uk[i]))= 3(uк -uk[i]); lms ,, scs = w .(8)
Второй шаг состоит в оценивании условного математического ожидания:
Xj = M {x | u
И в конечном итоге прогноз для каждой компоненты вектора выходной переменной будет находиться следующим образом:
^ x ˆ j
s < m >
£ X j [ i ] ■ П Ф i = 1 k 1 = 1
s < m >
£П ф
f ukl
f u,
V
- £ [ i ] ^ < n > f £ [ i ] )
—— ПФ — csu / k 2 =1 V cs£ )
i = 1 kx = 1 V
- u [ i ] ) < n > f £ [ i ] )
—— П Ф csu 7 k 2 =1 V cs£ /
j = 1, n
где колоколообразные функции Ф ( ■ ) могут быть взяты в виде треугольного ядра (11) и (12), и удовлетворяют условиям, представленным выше.
f uk - uk [ i ] ) ф jkк^_
V c su 7
Ф
f f k 1 [ i ] 1
V c s £ 7
Непараметрический алгоритм (6), (10) представляет собой двушаговую алгоритмическую цепочку, позволяющую находить прогнозные значения компонент вектора выхода при известных компонентах входных переменных, в случае стохастической зависимости выходных переменных.
За функцию ошибки принимается относительное среднеквадратическое отклонение
s

£( x j ( t )- x i ( u < j > ( t ) ))
j = 1, n ,
i = 1 _______________________________________
1L(x‘j(t)-Mx, f i=1
где x i ( t ) - наблюдения на объекте,
Xi,(u ">(t))
прогнозные значения выходных переменных
объекта, M – среднее значение по каждой компоненте вектора x .
Задача управления многомерными дискретно-непрерывными процессами.
Рассмотрим схему системы управления многомерным объектом (рис. 2).
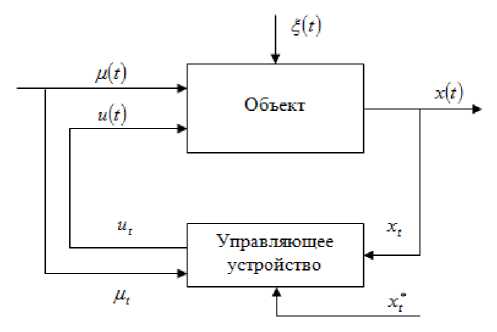
Рис. 2. Схема непараметрической системы управления безынерционным объектом Fig. 2. Diagram of a nonparametric control system of an inertialess object
На рис. 2 введены следующие обозначения: и ( t ) = ( и 1 ( t ) , и 2 ( t ),
...
управляемые переменные процесса; м ( ^ ) = ( м ( t )’ М ( t X
...
, и т ( t ))
–
входные
, m ( t ) ) — входные неуправляемые, но
контролируемые переменные процесса; x ( t ) = ( x 1 ( t ), x 2 ( t ) ,
...
, x n ( t )) - выходные переменные
процесса; x = ( x 1
,...,
x j ) e^ ( x j) c R n - задающее воздействие, ^ ( t ) - случайные помехи,
действующие на объект [13].
Управление Т-объектами рассматривается в условиях непараметрической неопределенности, т. е. в условиях, когда модель процесса с точностью до вектора параметров отсутствует полностью. В этом случае известные приемы не применимы и следует использовать другие подходы для решения задачи.
В задаче управления многомерным процессом со стохастической зависимостью выходных переменных необходимо использовать следующую многошаговую алгоритмическую цепочку: входную переменную их * ( t ) берем произвольно из области Q ( u1 ) . Произвольно из заданной области можно взять и любую другую входную переменную. Следующую входную переменную и * ( t ) находим в соответствии со следующим алгоритмом:
s
* u
Е и 2 Ф
I = 1
*
и 1
-
и 1
где < n >, < р >
–
s
Е ф i=1
V
Г и.
cu 1
* i
1- ^ 1
V Си .
< n >
п Ф
7 j = 1
< n >
п Ф
7 j = 1
j xj
V j xj
-
j
cY
xj 7
< р >
п Ф
V = 1
—
x j
c
V xj 7
< р >
п Ф
V = 1
j
M v
V
j
Mv
-
mV '
cv 7
- m V 1
V cmv 7
размерность соответствующих составных векторов x и м ,
< n > < n, < p > < р . Далее входную переменную и * ( t ) находим следующим образом:
* u
s
Е u зф
i = 1
*
u i
-
и1- ^Ф
*
u 2
-
V си 1 7
s
Е Ф i=1
*
u 1
-
ui'
Ф
V
*
u 2
cu 2
< n >
п Ф
7 j = 1
-
i u 2
V си 1 7
c
V и 2
< n >
п Ф
7 j = 1
j xj
V j xj
-
x j
c x j 7
< p >
п Ф
V = 1
-
xj'
c
V xj 7
< p >
п Ф
V = 1
j
Mv
V
Г *
j
M v
—
mV '
c m v 7
- m V 1
c
V Mv 7
.
И далее алгоритм управления продолжается для нахождения каждой компоненты входа u * ( t ) объекта, причем с каждым последующим шагом в формулу добавляются вновь найденные на предыдущем шаге значения входных переменных. Запишем алгоритм управления для многомерной системы, который будет выглядеть следующим образом:
* uk
s
5 к -1 (
Z u k П Ф i = 1 к = 1 V
*
uk
u k '
cu k
< n >
П Ф
7 j = 1
x
v
*
i
—
c
x j
x j
5 k— 1 ( zn Ф i=1 к=1 V
*i uk - uk
c
uk 7
< n >
П Ф
* xJ
—
j
< p >
ПФ
V = 1
*
M v
^-
mV )
v
c M v
j = 1 V
c
x j
< p >
ПФ
V = 1
/
J
M*
—
M v
k = 1, m .
V
c
В алгоритме управления (16) настраиваемыми параметрами остаются параметры размытости для входных и выходных переменных c , c и с , для них могут быть использованы следующие формулы: eUk = Ou * - u*| + П , cx = в x* - xil + П и с и = Дм* — Mi | + П, где а, в и Y некоторые параметры большие 1, а параметр 0 < п < 1. Следует обратить внимание на то, что выбор параметров размытости c , c и с осуществляется на каждом такте управления. При этом если сначала определен c , то определение c и с осуществляется с учетом этого факта. Очередность определения параметров размытости c , c и с несущественна.
Часто в задачах управления реальными процессами число компонент вектора u больше числа компонент вектора x . Если же размерность вектора u превышает размерность вектора x , т. е. m > n , то обычно поступают следующим образом. В число компонент вектора м включают некоторые (несущественные) компоненты вектора u с тем, чтобы размерность вектора u и x сделать одинаковой.
Вычислительный эксперимент по идентификации. Для проведения вычислительного эксперимента использовался многомерный объект с входными переменными u = ( u , u , u , u4 ) и выходными переменными x = ( X j, x 2, x 3) . Для рассматриваемого объекта была сформирована обучающая выборка входных и выходных переменных, исходя из системы уравнений из двух параметрических и одного непараметрического каналов. В результате была получена обучающая выборка u 5, xs , где Hs, xs - временные векторы. В случае, если бы перед нами находился реальный объект, обучающая выборка была бы получена в результате измерений, осуществляющихся имеющимися средствами контроля.
После получения выборки наблюдений izs, xs можно приступать к исследуемой задаче -нахождению прогнозных значений выходных переменных x по известным входным u . Прогноз для каждой компоненты вектора выходных переменных осуществляется согласно формуле (10).
Настраиваемыми параметрами будут параметры размытости с и c , которые в данном случае возьмем равным 0,4 и 0,3 соответственно (значения были определены в результате многочисленных экспериментов с целью уменьшения квадратичной ошибки между выходом объекта и модели). Объем выборки 5 = 1000, равномерная помеха, действующая на компоненты вектора выходных переменных ^ = 0,07 • По компонентно приведем графики для выходов объекта x , x и x (рис. 3–5).
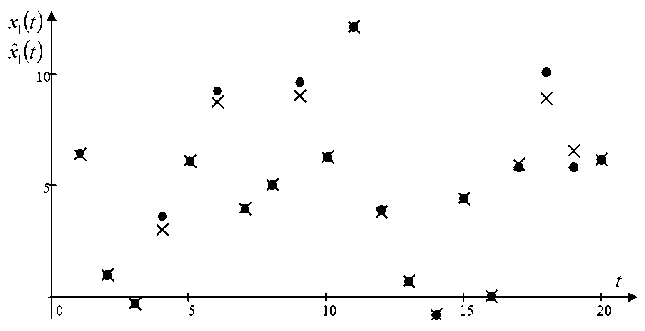
Рис. 3. Прогнозные значения выходной переменной x при помехе 7 %
Fig. 3. The predicted values of the output variable x with an interference of 7 %
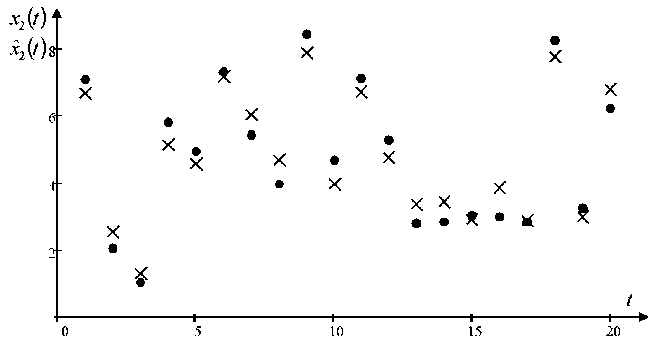
Рис. 4. Прогнозные значения выходной переменной x при помехе 7 %
Fig. 4. The predicted values of the output variable x with an interference of 7 %
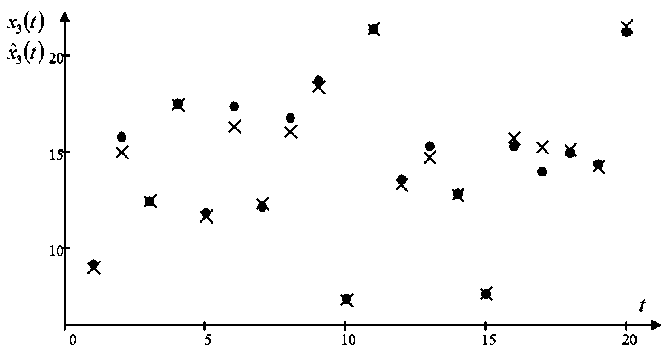
Рис. 5. Прогнозные значения выходной переменной x при помехе 7 %.
Fig. 5. The predicted values of the output variable x with an interference of 7 %
На рис. 3–5 «точкой» обозначены значения выхода объекта, а «крестиком» значения выхода модели, найденные при помощи алгоритма (5), (9). Для наглядности результатов на рисунках представлены 20 точек выборки. Стоит отметить, что модель достаточно хорошо описывает объект при помехе 7 %, действующей на компоненты выходных переменных.
Вычислительный эксперимент по управлению. Приведем результаты вычислительных экспериментов для многомерного объекта с входными переменными u = ( ux , u 2, u 3, u 4) и выходными переменными x = ( x ,, x 2, x 3) при использовании многошагового алгоритма управления (13). Для рассматриваемого объекта можно заметить, что число компонент вектора u больше числа компонент вектора x . Поэтому заменим u 4( t ) = ^ ( t ) , чтобы размерность вектора u и x сделать одинаковой. Входная неуправляемая, но контролируемая переменная ^ ( t ) е [0, 3].
Еще раз обратим внимание на то, что исследователю неизвестен вид системы уравнений, описывающий управляемый многомерный объект. В качестве информации о рассматриваемом объекте используются измерения входных и выходных переменных ( и , ^ , x , i = 1, 5 ).
Сначала приводятся результаты работы многошагового алгоритма управления (16) при изменяющемся ступенчатом задающем воздействии
x * ( t ) (рис. 6).
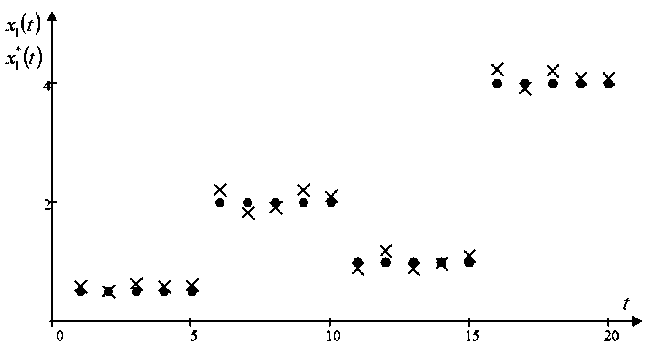
Рис. 6. Управление при задающем воздействии x 2 ( t ) в виде ступенчатой функции
Fig. 6. Control under the setting action x 2 ( t ) in the form of a step function
Как видно из рис. 6, выход объекта x ( t ) достаточно близок к задающему воздействию X j2 ( t ) . Далее приводятся результаты работы алгоритма при плавно изменяющемся задающем воздействии x * ( t ) (рис. 7) .
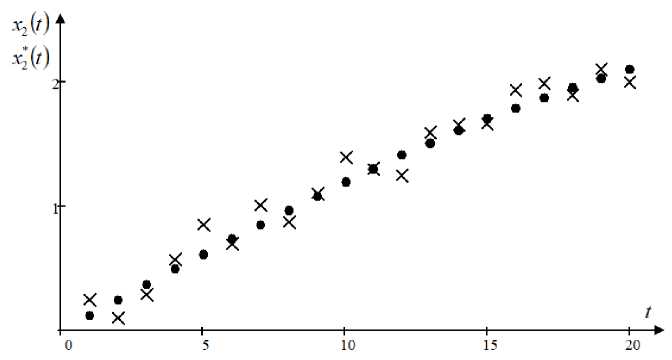
Рис. 7. Управление при задающем воздействии X2 (t ) в виде плавно изменяющейся функции Fig. 7. Control under the set action Xг (t ) in the form of a smoothly changing function
Далее приводятся результаты работы характер (рис. 8).
алгоритма, когда
задание
x * ( t ) носит случайный
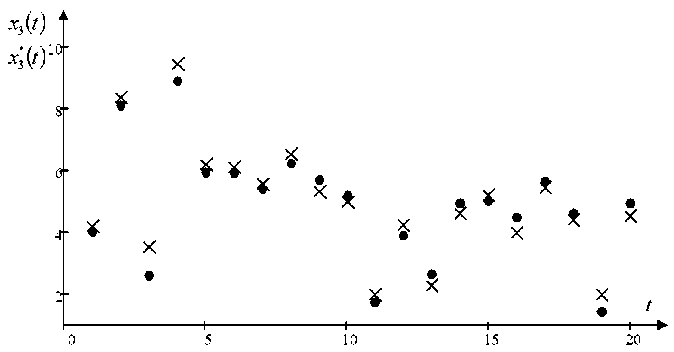
Рис. 8. Зависимость выхода объекта x 3 ( t ) от задающего воздействия x 3 ( t ) , носящего случайный характер
Fig. 8. The dependence of the output of the object x3 ( t ) on the driving influence x 3 ( t ) ,
which is random in nature
Из рис. 8 можно увидеть, что выход объекта x3 ( t ) также достаточно близок к задающему воздействию x * ( t ) . С такой задачей, когда задающее воздействие носит случайный характер, не справится ни один из известных регуляторов [14]. Но все-таки такой случай представляет интерес с теоретической точки зрения.
Заключение. В данной работе была рассмотрена задача идентификации и управления многомерными безынерционными системами с запаздыванием в условиях недостатка априорной информации. Здесь можно отметить ряд особенностей, которые состоят в том, что задачи идентификации и управления рассматриваются в условиях непараметрической неопределенности и, как следствие этого, не могут быть представлены с точностью до набора параметров. Хорошо настроенные алгоритмы моделирования и управления могут быть успешно применены в реальных системах управления, диагностики, принятия решений и др. [15].
Приведенные вычислительные эксперименты по идентификации и управлению показали достаточно удовлетворительные результаты моделирования многомерных процессов. При этом исследовались вопросы, связанные с введением различных помех, разных объемов обучающих выборок, но и объектов различных размерностей.
Список литературы Непараметрические многошаговые алгоритмы моделирования и управления многомерными безынерционными системами
- Sinyuta V. R., Yareshchenko D. I. [On nonparamet-ric modeling of the process of catalytic hydrodeparaffini-zation]. Materialy XXII Mezhdunar. nauch. konf. "Reshetnevskie chteniya" [Materials XXII Intern. Scientific. Conf "Reshetnev reading"]. Krasnoyarsk, 2Ö18, P. 16ö-162 (In Russ.).
- Yareshchenko D. I. [Some notes on the assessment of knowledge of university students]. Otkrytoe obra-zovanie. 2Ö1V, No. 4, P. 66-V2 (In Russ.).
- Medvedev A. V. Osnovy teorii neparamet-richeskikh sistem. Identifikatsiya, upravlenie, prinyatie resheniy [Fundamentals of the theory of nonparametric systems. Identification, management, decision making]. Krasnoyarsk, SibGU im. M. F. Reshetneva Publ., 2Ö18, V32 p.
- Tereshina A. V., Yareshchenko D. I. [On nonpara-metric modeling of inertialess systems with delay]. Sibir-skiy zhurnal nauki i tekhnologiy. 2Ö18, Vol. 19, No. 1, P. 3V-44 (In Russ.).
- Moiseev N. N. Matematika stavit eksperiment [Mathematics is an experiment]. Moscow, Nauka Publ., 1979, 224 p.
- Medvedev A. V. Neparametricheskie sistemy adap-tacii [Nonparametric adaptation systems]. Novosibirsk, Nauka Publ., 1983. 174 p.
- Vasil'ev V. A., Dobrovidov A. V., Koshkin G. M. Neparametricheskoe ocenivanie funkcionalov ot raspre-delenij stacionarnyh posledovatel'nostej [Nonparametric estimation of functionals of stationary sequences distributions]. Moscow, Nauka Publ., 2004, 508 p.
- Cypkin Ya. Z., Osnovy informacionnoj teorii iden-tifikacii [Fundamentals of information theory of identification]. Moscow, Nauka Publ., 1984, 320 p.
- Zarubin, V. S. Matematicheskaya statistika [Mathematical statistics]. Moscow, MGTU im. Baumana Publ., 2008, 424 p.
- Linnik Yu. V. Metod naimen'shikh kvadratov i osnovy teorii obrabotki nablyudeniy [Least Squares Method and the Basics of Observation Processing Theory]. Moscow, FIZMATLIT Publ., 1958, 336 p.
- Nadaraya Eh. A. Neparametricheskoe ocenivanie plotnosti veroyatnostej i krivoj regressii [Nonparametric estimation of probability density and regression curve]. Tbilisi, Tbilisskiy universitet Publ., 1983, 194 p.
- Zhivoglyadov V. P., Medvedev A. V. Neparametricheskie algoritmy adaptatsii [Nonparametric adaptation algorithms]. Frunze, Ilim Publ., 1974, 135 p.
- EHjkhoff P. Osnovy identifikacii sistem uprav-leniya [Basics of identification of control systems]. Moscow, Mir Publ., 1975, 7 p.
- Fel'dbaum A.A. Elektricheskie sistemy av-tomaticheskogo regulirovaniya [Electric automatic control systems]. Moscow, Gos. izd-vo oboronnoy pro-myshlennosti Publ., 1957, 808 p.
- Antomonov Yu. G., Harlamov V. I. Kibernetika i zhizn' [Cybernetics and life]. Moscow, Sov. Rossiya Publ., 1968, 327 p.
