Непараметрическое моделирование интеллектуальных систем при неполной информации

Автор: Низамеев Анатолий Рафаилович
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Математика, механика, информатика
Статья в выпуске: 4 (11), 2006 года.
Бесплатный доступ
Приведена схема управления многосвязным технологическим процессом. Даны общая и математическая постановки задачи управления многосвязным процессом. Построены непараметрические модели идентификации входных и выходных значений управляемого процесса.
Короткий адрес: https://sciup.org/148175279
IDR: 148175279 | УДК: 62-501
Nonparametric modeling of intelligent systems under incomplete information
It is given the controlling scheme of multiply connected technological process and also general and mathematical statements of multiply connected processes controlling problem. It is constructed the nonparametric models of in-and-out values of operated process identification.
Текст научной статьи Непараметрическое моделирование интеллектуальных систем при неполной информации
НЕПАРАМЕТРИЧЕСКОЕ МОДЕЛИРОВАНИЕ ИНТЕЛЛЕКТУАЛЬНЫХ СИСТЕМ ПРИ НЕПОЛНОЙ ИНФОРМАЦИИ
Приведена схема управления многосвязным технологическим процессом. Даны общая и математическая постановки задачи управления многосвязным процессом. Построены непараметрические модели идентификации входных и выходных значений управляемого процесса.
При моделировании и управлении сложными технологическими процессами часто возникает ситуация, когда параметрическая зависимость по ряду каналов объекта неизвестна полностью или частично. В этой связи перспективным является использование теории непараметрических обучающихся систем [1]. Рассмотрим формулировку задачи идентификации и управления для одного объекта, который будем считать фрагментом технологического процесса.
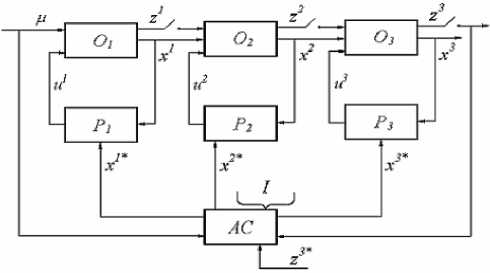
Общая постановка задачи. Рассмотрим схему (рис. 1).
Рис. 1. Схема управления процессом: О-объект;
АС - адаптивная система; ut - управляющее воздействие;
- контролируемое неуправляемое воздействие;
^ t - случайное воздействие; х,, zt - выходные переменные; hu, h " , hx, hz - помехи в каналах измерения; uth, ц ? , xth, zj -измеренные значения соответствующих переменных;
xj и zj- заданные значения выходных переменных
Следует заметить, что блок АС представляет собой достаточно сложную структуру, детализацию которой приводить не будем, лишь укажем, что в ее состав входят как модель исследуемого процесса, так и соответствующая процессу иерархия блоков управления.
Целью системы управления является поддержание заданного значения х* и z*. Отметим в связи с этим суще ственные отличия выходных переменныхxt и z. Выходная переменная х контролируется через достаточно малые интервалы времени At, как и переменные u, ц, А выходная переменная z отслеживается через существенно большие интервалы времени AT (AT>> At). С технологической точки зрения для всего технологического процесса наиболее важным является контроль именно этой переменной. Например, если выходная переменная х контролируется с помощью различного рода индукционных, емкостных и других датчиков, то выходная переменная z - по результатам химического анализа, физико-математических испытаний и др. Этим и обусловлено существенное отличие дискретности контроля выходных переменных х, и z. Если дискретность измерения х u ц. - это секунды, минуты, то дискретность z, составляет смену, сутки, недели и более. Последнее обусловлено технологией проведения самого контроля, который обычно регламентируется государственным стандартом.
Математическая постановка задачи. Пусть Ц , = { ц1„...,ц k } е R k , u , = { u t ,..., u m } е R m , x , = { x 1 ,..., x , } e R " , z , = { z , 1 ,..., z , } s R l . Характеристики объектов О1, О2и О3 взаимооднозначны по вектору управляющих переменных, т. е. одному значению utсоответствует только одно значение y.t. Имеется обучающая выборка { ц t , u,, х, Zt _ ф, t = 1, 5 }, где т указывает на запаздывание (смена, сутки ит.д.).
Сформулируем критерий оптимальности:
R ( z ) = Mu , ц { M z ( z _ z )2 | u , ц} = m i n, (1)
где zt - оценка вектора выхода z.
Используя необходимое условие минимума, т. е. приравняв производную функции R по искомой величине z к нулю, получим:
zopt = M ( z\u , ц}. (2)
Непараметрическая оценка выходной переменной zt для системы (см. рис. 1) имеет вид
s
m
k z s + 1
Z z. П ф i = 1 j = 1
u s V
^^^^^^в
j
U , 1
n
П ф
Ц р + 1
^^^^^^в
Ц p
sm
ZПФ
fu j u s + 1
^^^^^^в
us
j
ui
n
П ф
I p
Ц s +1
^^^^^^в
Ц y i c2
7 , (3)
где s - размер обучающей выборки; z ” s +1'
k
^^^^^^в
7
оценка к-й
компоненты вектора выхода, к = 1, l ; и$+1- вектор входа из экзаменующей выборки; Ф - ядро функции, и выбираемое по следующим условиям: j Ф(b)db = 1;
ОО г ви
Ф( b1 ) <Ф ( b 2 ) для | b2 | < | b | ; j bp Ф ( b ) db <^ ,р = 2,3,...;
вИ
Ъ - аргумент функции Ф ; Сй - параметр размытости ядра Ф, удовлетворяющий условиям: C n ^»_0 ; «с „ ( n ) n - >_~ .
При выполнении этих условий оценка z является асимптотически несмещенной, состоятельной, асимптотически нормально распределенной.
Параметр размытости С выбирается по условию выполнения минимума критерия:
Пусть N, О ,A - размерности векторов zt1, zt2 и zt3; N, О , A - размерности векторов zt1, zt2 и zt3; H, F и T - размерности векторов xt1, xt2, xt3; У , Г и Q - размерности векторов и 1, и 2 и и 3; D - размерность вектора ц t .
Запишем модели прогноза выходных значенииzt1,zt2, zt3 и xt1,xt2, xt3, а также модели расчета управляющих воздействий ut1, иt2, иt3 для объектов О1, О2 и О3.
Непараметрические оценки выходных переменных zt1, zt2, zt3 будут выглядеть следующим образом:
1 18 __ z s +ф =
а 25
z s +ф =
s
у
Z z 1 П ф i = 1 j = 1
й;+1в u,
u 1 s
D
Ц k + 1
в
Цк
Ц s
s У
ZПФ
Us+1 в U,
D
П ф
Ц k + 1
в
Ц k
,
u 1 s
5 = 1, N ,
Ц s
(9),
s Г
Z z25 Пф i=1 j=1
u
в й 2 i
N
1k zs +ф в
z 1 ik
u 2 s
s
R = Z ( zi в zi( C )) 2 — min, i = 1 C
s Г
ZП Ф i =1 j =1
u s +1 в u i
N
с к zs
1k1k zs+ф в zi
Н
Пф i=1
1 p x +
^^^^^е
x 1 ip
u 2 s
с к
V zs
Н
Пф p=1
A___
1 p x s +1
C p 1 xs
^^^^^в
x 1 ip
,
X
C p 1 xs
где s - размер обучающей выборки.
Критерий оптимальности для оценки управляющего воздействия выглядит так:
отсюда R ( й) = M Ц z x { M u ( u - й ) 2 | ц, z , x } = min, (6),
Ц ’ ’ й
5 = 1, О ,
(Ю)
отсюда й °р t = M ( u | ц, z , x = z * }.
~35 _ z s + ф =
sQ
Z z3 Пф i=1 j=1
u
^^^^^в
u3ij
u 3 s
О
z
/2 к
Формула оценкиу-го компонента вектора и в момент времени s+1 записывается следующим образом:
sQ
ZП Ф i =1 j =1
u s + 1 в u i
О
_
”2 к
■ s +ф в z
Ck z2s
, 2 к ^
F
- П Ф
2p x +
^^^^^в
2 p x L
u 3 s
z-CCPV z s
, 2 к ^
.z
F
p =1
p =1
j u s +
где j = 1, m .
Непараметрические модели последовательного технологического процесса. Приведем сравнительно простую схему технологического процесса (рис. 2). На это схеме опущены помехи, действующие в каналах измерения, чтобы не загромождать рисунок, хотя предполагается, что они, конечно же, действуют.
35 _ x s +1 =
£ 25 _ x s +1 =
Рис. 2. Схема последовательного технологического процесса (обозначения см. в тексте)
Содержание переменных соответствует описанному ранее. Отметим лишь, что роль неуправляемых переменных в данной схеме играют как ц t , так и z1, z2, контроль которых, производится через различные, но значительные интервалы времени. Блоки Р1, Р2 и Р3 - это регуляторы соответствующих объектов Ор О2 и О3; I- вся имеющаяся информация о процессе.
5 = 1, А .
C P A__ x A, 2 p 2 p x s +1 x i
Cp 2 xs
Непараметрические оценки выходных переменных x1, xt2, xt3 записываются таким образом:
£15 x s + 1
s
Z x,2
i =1
s
у
Z x8 П ф i = 1 j = 1
й;+1в u,
u 1 s
Г
D
Ц k + 1
в
Ц k
Цs
s у
s Г
ZП Ф i =1 j =1
u
u
в й i
u 1 s
5 = 1, Н ,
в й ‘j
Н
u 2 s
й s +1 в й i
sQ
Z x - п ф i =1 j =1
u
Н
2 us
в
D
f x 1 к
.А___ x1sk
^^^^^в
k
C 1
в
C 1 V x s
5 = 1, F,
u 3 ij
F
x 2 sk
Ц k + 1
1 k x i
x1s x1ik
в
в
Ц k
Ц s
\N
Пф
Б=1
InПф p=1
x 2 ik
,
f Z1 p z
.A_____
1p z s+1
X
^^^^^в
(12) zL '
C p 1 zs
в
z 1 ip
C p 1 zs
,
sQ
ZП Ф i =1 j =1
u s +1 в u i
F
u 3 s
C 2 x s_ f Y2 к -Y2 к x-c^ V x 2 s
5 = 1, T .
Lo_
Пф
2p z s+1
в
(13) z 2iL
О
Пф
X
CP
Л_____ z z
2p2p z s+1 z i
C p 2 zs
,
Непараметрические оценки выходных переменных ut1, иt2, иt3 записываются следующим образом:
W15 u s + 1
s N
Z 4* Пф i=1 j=1
Z . - Z s + 1 i
D
^^^^^в
Ц
Пф
1 p *
x . . 1
^^^^^в
xl
z 1 s
Ц s
p = 1
s N i =1 j=1
jj z s+1 z i
D
в
Ц i
z 1 s
Ц s
Н
0 Ф
X f r1 p *
x s + 1
Cp x 1 s
в
x 1 ip
,
c p
V xs 7
5 = 1, Т , (15)
* 25 uS^ 1
s П
Е и2 Пф i=1 j =1
ЕПф i=1 j =1
2 j . _ . +1 z
z
Пф
z Vk * _v2 k x s +1 x i
C \ x s
s +1
^^^^^™
. 2 j
z s
П ф
z 2k k * _v2 k X s +1 x i
k
■ x2 s
\
z ^ ( и ) =
sk
Е z [ s ] П о i =1 j =1
( u j - u j [ i ] . C j [ s ]
n
П о
(^ C WT j
k

( U j - U j [ i ] v C j [ s ]
П о
(
j
3 5 u s +1
sA
Е u35 Пф i=1 j=1
sA
ЕПф i=1 j=1
5 = 1, Г , (16)

\t, о ф
( V3 k * _ V3 k x s +1 x i
\
k x3 s

^^^^^™
z s
в ф
( 3 k * 3 k x s+1 - x i
k x3 s
5 = 1, Q .
Непараметрические модели и алгоритмы управления с идентификатором. Рассмотрим задачу управления объектом с идентификатором в управляющем контуре (рис. 3). Как на предыдущей схеме (см. рис. 2), на этой схеме опущены помехи, действующие в каналах измерения.
На первом этапе, когда ключ К1 разомкнут решается задача идентификации, на втором этапе, когда ключи К1 и К2, К3, К4 замкнуты, решается задача выработки управляющего воздействия, которое и подается на объект.
Далее для простоты записи будем рассматривать непараметрические алгоритмы на примере одного объекта. Для последовательной цепочки объектов алгоритмы записываются аналогичным образом.
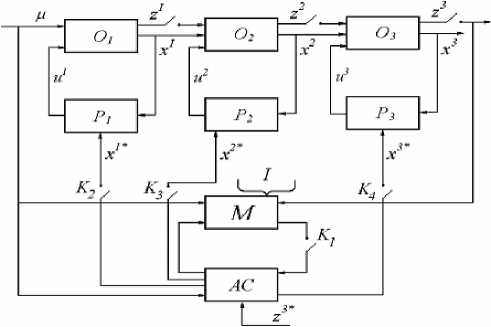
Рис. 3. Схема управления с идентификатором: модуль М - модель
Введем некоторую функцию качества о( t ) = о( z ( t ), z * ( t )). Поскольку для показателя качества о( t ) , который представляет собой меру уклонения z(t) от z*(t), естественно потребовать равенство нулю, то оптимальное управляющее воздействие, в смысле квадратичного критерия о( t ) может быть представлено в виде условного математического ожидания:
u ( t ) = M { u ( t )/p( t ) e Q(p),o( t ) = OV z ( t ) e Q(z) } , (18)
Для решения задачи идентификации в условиях непараметрической неопределенности будем использовать непараметрическую модель идентификации объектов без памяти, алгоритм который имеет вид
7 , (19)
% = 1, m , где s - объем выборки; k, n и m - количество входных
управляемых, неуправляемых и выходных переменных
соответственно.
Задача сводится к непараметрическому оцениванию
(18) на основании поступающей информации { zt , ц t , u t } , t = 1, s . Ясно, что в качестве непарамет
рической оценки (18) может быть принята статистика
U (.[ s ] = где
s - 1 k
Е u [ i ] П 0
i = 1 j = 1
s - 1 k
ЕПо i=1 j=1
( О j [ s ] C j [ s ]
( о j [ s ] C [ s ]
V j
n
) ПО
П о
I j^
C j [ s ]
z
^ i [ s ] v j
+ A u j [ s ], (20)
O[ s ] = ( O 1 [ s ],..., о m [ s ] ) ; o j [ s ] = o j ( z j *[ s ], z j [ s ] ) ;
A u j [ s ] = A u ( o j [ s ] ) , j- количество входных управляемых
переменных; A u j [ s ] - изучающая добавка, j = 1, k .
Для того чтобы использовать опыт технолога-эксперта для выбора некоторых управляющих воздействий при решении этой задачи, алгоритм (20) следует модифицировать в форме
u j [ s ] =
f u [ i ] f о (°™ 1 пт о ( ^ j l s Di^' - о ( u T v s ] u j [ i ] 1:1 j 1 = П I C j [ s ] 1 °! = П I C j [ s ] J J j = 1 I C j [ s ]
V k о ( о j [ i ] n о ( ^ j [ s ] ^ j [ i ] ” о ( uj [ s ] uj [ i ] Е J j = 1 I C j [ s ] JJ j = 1 I C j [ s ] IJ j = 1 I C j [ s ]
1, (21)
c < k , j = 1, { k - c } .
В заключение приведем некоторые типы A u [ s ] адап
тивных непараметрических систем играющих основную роль при активном обучении:
- алгоритм с обратной связью
A u [ s ] = е ( z * s , z s - 1 ) , (22)
где е - некоторая функция, представляющая собой меру уклонения одного из элементов z s - 1 от заданного значенияz*;
- градиентный алгоритм
A u [ s ] = 0 s V x Q ( z * , z s - 1 ) , (23)
где c s - некоторая случайная последовательность; Q - выпуклая функция. Для этого класса могут быть ис
пользованы различные статистические оценки градиента, в том числе и непараметрические;
- обучающийся алгоритм. Для алгоритмов такого типа A w[s] определяется так
3 k , z z, [ s ] - z ,[ i ] 1 .^T k T , z z, [ s ] - z ,[ i ] 1
A u [ s ] = E A u [ s ] П О j C s jJ / ЕП о C I s ] (24)
j I i 7 i j I j 7
Приведенные непараметрические алгоритмы предполагают последовательную схему обучения и могут носить как активный, так и комбинированный характер.
