Нестационарные одномерные динамические задачи разномодульной упругости с кусочно-линейной аппроксимацией краевых условий

Автор: Дудко О.В., Лаптева А.А., Рагозина В.Е.
Статья в выпуске: 4, 2019 года.
Бесплатный доступ
Объектом исследования является разномодульная упругая среда, подверженная динамическому деформированию. Разномодульность (зависимость связи «напряжения - деформации» от направления деформирования) является характерной особенностью множества природных и конструкционных материалов: горных пород, пористых и связных сыпучих сред, волокнистых и зернистых композитов, некоторых металлических сплавов и т.д. Перечисленные материалы проявляют свойство разномодульности уже на стадии упругого деформирования, что особенно необходимо учитывать при решении задач их ударной динамики. Для описания разномодульного поведения упругой среды в терминах малых деформаций в работе используется физически нелинейная модель В.П. Мясникова. Принятое предположение об одномерном характере деформации сводит нелинейную связь напряжений и малых деформаций к кусочно-линейным уравнениям. При динамической ударной деформации исходная нелинейность модели сосредотачивается в уравнениях, задающих скорость ударной волны, которая скачком переводит разномодульную среду из состояния растяжения к сжатию. В работе исследуются процессы возникновения, движения и возможных взаимодействий плоских одномерных волн деформации (включая ударные волны) в разномодульном упругом полупространстве. Граничные точки полупространства совершают одномерные движения по заданному нелинейному закону, соответствующему режиму «растяжение-сжатие». Нестационарное краевое условие задачи предлагается заменить на его кусочно-линейную аппроксимацию, что позволяет построить связанную последовательность аналитических решений с линейным краевым условием на каждом локальном временном интервале. Предложенный подход является основанием алгоритма численного решения краевой задачи с исходным нелинейным условием. Показано, что общее решение за ударной волной состоит из нескольких локальных слоев, число которых связано с количеством узлов кусочно-линейного разбиения краевого условия. В этих слоях деформация сжатия не только определяется соответствующей частью краевого условия, но и «хранит» информацию о предварительном растяжении, что следует считать важной особенностью динамики разномодульной среды.
Упругость, разномодульная среда, нестационарное деформирование, кусочно-линейная аппроксимация, одномерное движение, плоские волны, взаимодействие волн
Короткий адрес: https://sciup.org/146281967
IDR: 146281967 | УДК: 539.3:517.958 | DOI: 10.15593/perm.mech/2019.4.04
Nonstationary 1D dynamics problems for heteromodular elasticity with piecewise-linear approximation of boundary conditions
The paper provides the investigation of a heteromodular elastic medium under dynamic loading. The heteromodularity (when the stress - strain relation depends on the deformation direction) is a distinctive feature of many natural and structural materials: rocks, porous and cohesive bulk media, fibrous and granular composites, some metal alloys, etc. The fact that the listed materials show the heteromodular property at the stage of elastic deformation should be especially taken into account when solving problems of their shock dynamics. To describe the heteromodular behavior of an elastic medium in terms of small strains we use the physically nonlinear model of V.P. Myasnikov. The accepted assumption about the one-dimensional straining reduces the nonlinear relationship of stresses and small strains to piecewise linear equations. In the case of dynamic shock deformation, the initial nonlinearity of the model is concentrated in the equations which define the velocity of the shock wave abruptly transforming the heteromodular medium from a stretched to a compressed state. In this paper we investigate the processes of generation, motion, and possible interactions of plane one-dimensional deformation waves (including shock ones) in a heteromodular elastic half-space. The points of the half-space boundary undergo one-dimensional motions according to a given non-linear law corresponding to the “stretching-compression” mode. We suggest replacing the nonstationary boundary condition of the problem by its piecewise linear approximation and constructing a connected sequence of analytical solutions with a linear boundary condition at each local time interval. The proposed approach is the basis of the numerical solving algorithm for a boundary value problem with a given nonlinear condition. It is shown that the general solution behind the shock wave consists of several local layers, which number is related to the quantity of nodes in the piecewise linear decomposition of the boundary condition. In these layers, the compression deformation is defined by the relevant part of the boundary condition and simultaneously “stores” information on the preliminary tension, which should be considered an important feature of the heteromodular medium dynamics.
Текст научной статьи Нестационарные одномерные динамические задачи разномодульной упругости с кусочно-линейной аппроксимацией краевых условий
ВЕСТНИК ПНИПУ. МЕХАНИКА № 4, 2019PNRPU MECHANICS BULLETIN
Известно, что большинство природных и конструкционных материалов обладают существенной нелинейностью связи между напряжениями и деформациями. Разномодульные среды занимают особое место в этом ряду, поскольку их нелинейность имеет практически сингулярный характер и проявляется уже на стадии упругого деформирования. В первую очередь это касается горных пород [1-5], всевозможных пористых и связных сыпучих сред [6-8], волокнистых и зернистых композитов [9-12], а также некоторых современных сплавов [13-16]. Распространенность и промышленная ценность таких материалов являются причиной активного экспериментального и теоретического изучения их физикомеханических свойств. К настоящему времени разработан целый ряд нелинейных математических моделей разномодульных сред (например, [17-23]), поскольку классических представлений линейной теории здесь оказывается недостаточно. Учет физической нелинейности разномодульного материала достигается в модельных соотношениях самыми разными способами: зависимостью упругих модулей от типа напряженно-деформированного состояния [21, 22, 24], постулированием упругого потенциала особой формы [17-20, 23], построением различных реологических схем [25-29] и т.д. В [30] на основе компиляции подходов [17, 18, 20, 24] модельные соотношения разномодульной упругой среды в простейшем случае ее одномерного движения записаны в форме кусочно-линейных функций напряжения от деформации. Замена гладкой нелинейной связи на ее кусочно-линейную аппроксимацию существенно упрощает процедуру решения ряда нестационарных краевых задач одномерной динамики разномодульной среды. Так, в [31] представлены обобщенные решения с одиночными плоскими одномерными волнами деформаций, возникающими в разномодульной среде [18] при различных гладких нелинейных краевых условиях; в [32] для этой же модели получено решение одномерной задачи о гармоническом нагружении границы полупространства с чередованием ударных волн и жестких слоев; в [33-35] рассмотрено движение одномерных плоских и сферических волн в кусочно-линейной разномодульной среде при кусочно-гладком изменении граничной нагрузки с растяжения на сжатие или наоборот. Однако до сих пор для разномодульных материалов не затрагивался вопрос о нестационарном взаимодействии нелинейных волновых фронтов друг с другом, поскольку даже кусочно-линейные модельные соотношения не позволяют в этом случае обойтись без привлече- ния специальных приближенных методов [36]. Данную проблему можно в некоторых частных случаях снять, если в дополнение к линеаризации модельных соотношений разномодульной среды выполнить кусочнолинейную аппроксимацию нестационарных краевых условий задачи. Продемонстрируем это в настоящей статье.
1. Определяющие соотношения
Запишем систему модельных уравнений динамики деформирования разномодульной упругой среды в прямоугольных декартовых координатах, считая, что процесс адиабатический, деформации малые и массовые силы отсутствуют:
_ д W р .
° ij, = Р Vi , ° = д--- , --- = 1 - uk, к ’ д eij Ро
-
2 e ij = u i, + u j , i , v i = i t i ,
X _2
E 1 e kk , E 2 ei k e ki .
Здесь ° у - компоненты тензора напряжений Коши; e ij -компоненты тензора малых деформаций; р 0 и р - начальная и текущая плотность среды; u i и v i -компоненты вектора перемещений и вектора скорости перемещений точек среды; латинским индексом после запятой обозначена частная производная функции по независимой пространственной переменной x^ , точкой -частная производная по времени t . Различное сопротивление материала растяжению и сжатию в системе (1) постулируем упругим потенциалом среды W [18, 20], где X , ц - параметры Ламе линейной среды, дополнительное слагаемое с константой v отвечает за проявление эффекта разномодульности при смене типа деформированного состояния. Многоточием обозначены невыписанные слагаемые неаналитичного при ey = 0 разложения [20] упругого потенциала в ряд по сферическим функциям, для которого в [20] дополнительно принято W (0) = 0 и показано существование пределов lim W ( e ij ) = 0, lim д W 1 6 e ij = 0. В случае
I e ij l ^ 0 I e ij l ^ 0
одномерного движения точек среды ( u 1 = u ( x , t ), u 2 = u 3 = 0, e = u , x ) упругий потенциал W в форме (1) приводит к кусочно-линейной зависимости ° ( e ):
° ( e ) = { X + 2 ц- 2 v- sign( e )} e , ° (0) = 0, (2)
где sign( e ) = e /1 e | при e * 0 . Аналогично обобщенной модели [20] второе равенство (2) обеспечивает сохранение непрерывности связи ° ( e ) в нуле. Используя (2), из системы (1) получаем уравнение движения
2 I a = 7Р- 1 (Х + 2ц + 2v), u , x < 0,
СИ , xx = U, с = ^ -------------- (3)
[ b = уР 1 (Х + 2ц-2v), u , x > 0.
В (3) характеристическая скорость с может принимать различные значения в зависимости от типа деформации: с = а в областях сжатия среды, с = b в областях растяжения (а > b при v> 0). Решение уравнения (3) в форме Даламбера u (x, t) = f (t - x/c) + g (t + x/c) (4)
с неизвестными функциями f ( £ ( x , t )), g ( n ( x , t )) определяется для каждой конкретной задачи с учетом заданных краевых и начальных условий.
Если в обобщенном решении уравнения движения (3) возникает одномерный фронт сильного разрыва x = D ( t ), то множество краевых условий задачи необходимо дополнить условиями совместности разрывов [37] и требованием непрерывности перемещений на поверхности D ( t ):
[°] = -р+ D '( t )[ v ], [ v ] = - D '( t )[ u , x ], [ u ] = 0. (5)
В (5) и далее разрывы функций на фронте D ( t ) обозначены как [ m ] = m + - m" , где m += m l , , „,
L J ’ ID (t )+0 ’ m~ = m\D(t)-0. Из условий (5) для модели (2) можно вычислить скорость сильного разрыва:
D'(t) = u +
X + 2 ц 2 v ■ sign( u ,- ) - 2 v ■ [sign( u , x )]—■■ [ u , x I.

/ + (6) р ,
которая оказывается зависимой от деформированного состояния ( u , + , u , - ) в малых окрестностях с обеих сторон от фронта D ( t ). Как будет показано далее, такая модельная особенность приводит к существенным отличиям динамики разномодульной среды от известных результатов линейной упругости даже в простейшем случае одномерных движений.
Для классификации возможных сильных разрывов D ( t ) в обобщенном решении уравнения (3) используем терминологию, аналогичную принятой в [38]. Если u , + * 0 и u,*u , - > 0, то в среде распространяется быстрый или медленный простой разрыв x = ^ ( t ); если u , + u , - = 0 при u , + * u , - , то такая волна - быстрый или медленный полусигнотон x = у ( t ) . Из (5), (6) следует, что простые разрывы и полусигнотоны в среде (2) движутся с характеристической скоростью c , равной а для быстрых фронтов у ± a ( t ), ^ ± a ( t ) и b для медленных Y ± b ( t ), ^ ± b ( t ) [31, 38] (знаками «+» и «-» у верхних индексов а ( b ) обозначим противоположные направления движения быстрых (медленных) фронтов;
далее знак «+» будем опускать). Ударной волной x = S ( 1 ) со скоростью S' ( 1 ) = G ( 1 ) будем называть такой сильный разрыв, у которого u,*u, x < 0 . Используя (5), (6), для модели (2), (3) можно показать, что b <| G ( 1 )|< a [31, 38].
Согласно приведенной классификации, простой разрыв £ ( 1 ) и ударная волна 2 ( 1 ) распространяются только по ненулевому предварительному полю деформации u , + * 0 . Ударная волна скачком меняет тип деформации с растяжения ( u , + > 0, с + = b ) на сжатие ( u , - < 0, с - = a ). Следует отметить, что ударный переход от сжатия к растяжению невозможен в силу неэволюционности такого разрыва [39]. Простой разрыв, в отличие от ударной волны, не изменяет тип деформированного состояния среды. Полусигнотон у ( 1 ) несет ударное граничное возмущение (растяжение или сжатие) в предварительно недеформированную область ( u , + = 0). Кроме того, в разномодульной среде (2) быстрый и медленный полусигнотоны могут двигаться парой, образуя между собой жесткий слой у b ( 1 ) < x < у a ( 1 ) при переходе предварительно сжатого материала в растянутое состояние [31, 32, 38].
Перечисленные свойства сильных разрывов в обобщенном решении уравнения движения (3) далее используем для анализа возможных волновых картин в задаче нестационарной одномерной динамики разномодульной среды.
2. Движение и взаимодействие плоских одномерных волн деформациив разномодульном упругом полупространстве
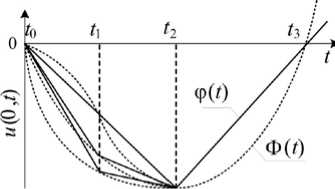
Рассмотрим задачу об одномерном динамическом деформировании разномодульного упругого полупространства под действием нестационарного граничного нагружения в режиме «растяжение-сжатие». Считаем, что изначально среда находилась в недеформированном состоянии: u 0 = 0 , e 0 = 0 , ст0 = 0. Пусть в момент 1 0 = 0 на границу x = 0 полупространства x > 0 начинает действовать нагрузка, вызывающая движение граничных точек по гладкому нелинейному закону u (0, 1 ) = Ф ( 1 ) (пунктирная линия на рис. 1): Ф ( t )| 1 0 < t < 1 3 < 0, ф ( t )| t > 1 3 > 0, ф ( 1 0 ) = ф ( 1 3 ) = 0, Ф '( 1 2) = 0, 1 0 < 1 2 < 1 3. Такое одномерное движение точек границы x = 0 приводит к растяжению среды при 1 0 < 1 < 1 2 и к сжатию при 1 > 1 2.
В [34,35] для описанного режима граничного воздействия показано, что в момент t2 в разномодульной среде (2) возникает ударная волна S(1), которая движется со скоростью G(1) > b за первичным медленным фронтом уb (t) и скачком переводит среду из растянутого состояния в сжатое. Однако временной интервал представленных в [34,35] решений не включает момент, когда ударная волна догонит идущий впереди нее медленный фронт растяжения. Здесь мы не будем накладывать таких ограничений, так как изучение взаимодействия волновых фронтов различного типа в разномодульной среде (2) является одной из основных целей нашего исследования.
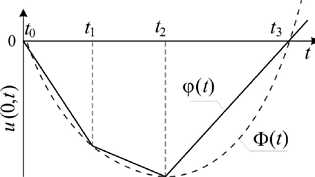
Рис. 1. Заданное перемещение граничных точек полупространства
Fig. 1. Displacement specified for boundary points of a half-space
Для заданной гладкой функции граничных перемещений u (0, 1 ) = Ф ( 1 ) можно построить ее непрерывное кусочно-линейное приближение:
y
1
(
t
),
1
0
<
t
...
. у. ( 1 ), t n - 1 < 1 ,
y. (1) = kit + pi, ti- < 1 < ti, i = 1,2,...,n, n > 2, k, = ф _ фi-1, p, = фi-1 - kt-1, ф, = ф(i,), y( tj) ‘ = yj+dtj) =Ф( tj), j = 1,2,..., n-1.
В (7) количество и расположение узловых точек t i функции ф ( 1 ) выбирается в зависимости от желаемой точности аппроксимации. Примем в (7) n = 3 и построим функцию ф ( t ) в форме трех линейных участков (сплошная линия на рис. 1):
ф ( 1 ) = •
y 1 ( t ) = k 1 1 + Р 1 , y 2( t ) = k 2 t + Р 2 , y 3( t ) = k 3 t + p 3 ,
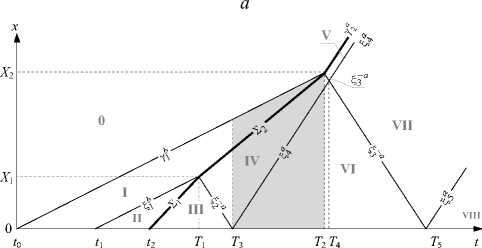
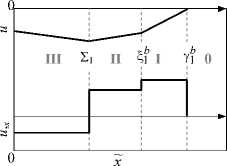
0 < 1<11, t1 < t Константы ki, pi в (8) вычисляются согласно (7). Три узловые точки функции ф(t) фиксируем при постановке задачи: 10= 0 и 13> 0 соответствуют нулям функции Ф( t), ф0=Ф( 10) = 0, ф3=Ф( 13) = 0; 12 -момент изменения граничной нагрузки с растяжения на сжатие (Ф'(12) = 0). Положение точки 11 может быть любым в интервале (0; 12). Таким образом, нестационарную начально-краевую задачу с гладкой функцией граничных перемещений u(0,1) = Ф( 1) разбиваем на несколько последовательных временных этапов, выбирая для каждого из них соответствующую часть кусочно-линейного краевого условия (8). Прогноз волновой картины на текущем этапе строим исходя из результатов предыдущего этапа. В дополнение к (8) в систему краевых условий каждого локального этапа включаем условия (5) на подвижных границах – фронтах сильных разрывов. Действуя по описанному алгоритму, получаем последовательность автомодельных решений, объединение которых составляет кусочно-гладкую аппроксимацию полей u(x,t) и u,x (x,t) во всей области деформирования на интервале t е [t0; t*]. Момент t* > t2, позже которого волновая картина уже не меняется при заданном формулой (8) движении граничной плоскости, является здесь точкой остановки вычислительной процедуры. Этап 1: нестационарное растяжение разномодульного полупространства при t е [0; t2). Согласно (8) движение точек границы x = 0 на интервалах времени t е [0; t1) и t е [t1; t2) определяется функциями у1 (t) и y2 (t) соответственно. Результатом такого граничного воздействия являются два медленных волновых фронта (рис. 2): полусигнотон yb (t) и простой разрыв Sb (t). б Рис. 2. Диаграммы сильных разрывов и областей гладкого решения: a - сценарий AB (T2< T3, b < G1 < G2< a); б - сценарий BA (T3 < T2, b < G2< G1 < a) Fig. 2. Diagrams for strong discontinuities and regions of a smooth solution: a - AB scenario (T2< T3, b < G1 < G2< a); b - BA scenario (T3 < T2, b < G2< G1 < a) Область 0 соответствует начальному (недеформиро-ванному) состоянию материала, в областях I и II среда подвергается растяжению (cI = cII = b). Полусигнотон Yb (t) (волна первичного растяжения) возникает в начальный момент 10 = 0 . Появление простого разрыва Sb (t) обусловловлено исключительно наличием излома функции ф(t) в точке t1. Здесь стоит отметить, что увеличение количества фронтов Sb (t) на этапе 1 за счет увеличения числа узловых точек ti е [0; 12) повышает точность аппроксимации всего решения, однако для наших целей достаточно одного простого разрыва Sb (t). С учетом краевого условия (8) на этапе 1 при t е [0; 12) решение в областях I и II (см. рис. 2) принимает вид и'(x,t) = A. + B.t + Cx, A = p. = 0, B, = k, C = -k / b, Sb (l )< x u" (x,‘) L<x Yb (t) = bt, Sb (t) = b(t - s). Этап 2: нестационарное сжатие разномодульного полупространства с момента t2и до первого взаимодействия разрывов различного типа. В момент t2 режим граничной нагрузки меняется с растягивающих усилий на сжимающие. Согласно (8) движение граничных точек теперь задано функцией ф(t) = у3 (t). В результате в момент t2 на границе x = 0 возникает ударная волна Z1(t) (см. рис. 2), которая движется со скоростью G1 (b < G1 < a) в предварительно растянутую область II, создавая за собой новую область сжатия III (cIII = a при 0 < x< 21(t)). Такая волновая картина существует в полупространстве до момента t = T1, когда ударная волна 21 (t) догонит медленный простой разрыв Sb (t) (см. рис. 2). Как и перемещение uIII(x,t), скорость G1 входит в число неизвестных функций задачи. Eсли условие на границе x=0 задано в форме гладкого нелинейного закона и(0,t) = Ф(t), то G1 в (5), (6) будет зависеть, кроме t , еще и от неизвестного скачка [и,x ]|z, (t) = (и,+ — и,- )|2 (t). В таком случае решение даже простой одномерной краевой задачи можно получить только численно или с привлечением специальных приближенных аналитических методов [36]. Замена нелинейной функции Ф(t) ее кусочно-линейной аппроксимацией (8) позволяет существенно упростить процедуру решения, так как перемещение граничных точек по линейному закону ф(t)|(>( = у3(t) инициирует ударную волну 21 (t), которая движется по предварительному полю и,x = const > 0 с постоянной скоростью: 2 22 k /b G, = a - (a - b )------------= const, b < G, < a, u Ш(x,t) |0 B3= k2(1 - G1 / b) + RG1 /a, C3= -R / a. Этап 3: эволюция ударной волны X, (t) в результате ее взаимодействия с медленным простым разрывом Sb (t). Область растяжения II перестает существовать при t = T1 > t1, когда ударная волна £1 (t) догоняет простой разрыв Sb (t) (см. рис. 2). Положение, которое в момент T занимают волны £1 (t) и Sb (t), определяется координатой X1 = Е,(T1) = Sb (T). В результате такого попутного столкновения £1 (t) и Sb (t) транформи-руются в два новых фронта, расходящихся от плоскости x = X 1 (см. рис. 2): быстрый простой разрыв S- a (t) и ударную волну £2 (t) со скоростью G2 ^ G1. Решение в новой области сжатия IV (cIV = a ) имеет вид u IV( x, t )| = A + B. (t - T) + Cx, v ’ ' k-a (t) S-a (t) = X1 - a (t - TO, £2 ( t) = X1 + G2( t - T), T = G1 t2 -btx 1 G1 - b ’ X1 = ^( T) = Sb (T) = bG1(12 -11) G1 - b A4 = k1 t1 - p1 -C4 X1, B4 = bG2( k3+ R) + ak1( b - G2) b (a + G2) C4 = k1( b - G2) - b (k3+ R) b (a + G2) В (12) скорость G2 ударной волны £2(t) вычисляется из (5) с учетом (8), (9), (11) по формуле G2 k1( a2- b2) k1( a + b) - b (k3+ R) = const ^ G1, b< G2< a. Этап 4: эволюция ударной волны X2 (t) в процессе нарастающего сжатия на границе полупространства. Система разрывов {S-a, £2, yb} существует до момента наступления одного из событий: A = {£2(T2) = yb (T2) = X2} - попутное столкновение ударной волны £2(t) с медленным полусигнотоном Yb (t) в момент t = T2 (X2= X 1 + G2(T2- T) = bT2); B = {S-a (T3) = 0 } - отражение быстрого простого разрыва S-a (t) от границы x = 0 в момент t = T3. Таким образом, дальнейшее решение может развиваться по различным сценариям: AB (T2 < T3) или BA (T2 > T3). Случай T2 = T3 не рассматриваем ввиду малой вероятности одновременного наступления событий A и B. Опуская подробности дальнейших вычислений, представим решения для каждого из указанных вариантов. На рис. 2, a показана диаграмма сильных разрывов для случая AB (T2 < T3), на рис. 2, б - для случая BA (T2 > T3). Области, где волновые картины различаются, отмечены штриховкой. При T2 < t < T3 (см. рис. 2, a) волновой пакет состоит только из быстрых разрывов {S-a, S-a, Ya}, разделенных областями сжатия III, IV и V (c111 = cIV = cV = a ), причем полусигнотон у a (t) и простой разрыв S-a (t) есть результат события A. В случае T3 < t < T2 (рис. 2b) волновая картина включает попутные разрывы {S4, X2’ Yb}, движущиеся с различными скоростями, и области с разными типами деформации: в IV и VI - сжатие (cIV = cVI = a), в I - растяжение (cI = b). Таким образом, ударная волна £2(t) может как закончить свое существание в самом начале этапа 4 в момент t = T2 < T3 вследствие ее трансформации в быстрые разрывы у a (t) и S- a (t) (вариант AB), так и продолжать участвовать в формировании поля деформации в областях сжатия IV, VI на всем протяжении этапа 4 вплоть до момента t = T2 > T3 (вариант ВА). Это приводит к двум различным наборам краевых условий (5) на сильных разрывах для случаев AB и BA. С учетом данного факта перемещение u(x,t) в областях V и VI вычисляется в виде u V(x, t )| E- am T2 = T1 + bt1/(G2 - b), uVI(x,t)|0< T3= T + X J a, S-a (t) = X2 - a (t - T2), у a (t) = X2 + a (t - T2), (14) S4 (t) = a (t - T3), A5 = 0.5X2(B4/a -C4), B5= 0.5(B4-aC4), C5 = 0.5(C4 -B4 /a), A6 = p 3 + k3 T3, B6 = k3, C6 = (B4 -k3)/a + C4. Константы B4, C4 в (14) известны из решения (12), (13) предыдущего этапа 3. Этап 5: продолжение сжатия на границе полупространства при t > T3 или t > T2 в зависимости от сценария предыдущего этапа (AB или BA). На данном этапе, начало которого совпадает с моментом t = T3 (вариант AB, рис. 2, a) или t = T2 (вариант BA, рис. 2, б), движение точек граничной плоскости по-прежнему определяется согласно (8) функцией ф(t) = y3 (t). В любой момент этапа 5 волновая картина состоит из трех быстрых разрывов (попутных или разнонаправленных, рис. 2), тип деформации во всех актуальных областях гладкого решения соответствует сжатию. Передним фронтом сжатия является быстрый полусигнотон у ° (t), который движется в недеформированную область 0. Помимо у ° (t), в формировании полей u (x, t) и u, x в областях V–VIII участвуют быстрые простые разрывы ^з a (t), ^4 (t), ^ (t). Неизменность типа деформации на протяжении всего этапа 5 приводит к постоянству характеристической скорости c всюду между передним фронтом у ° (t) и границей x = 0 (cV = cVI = cVII = = cVIII = a), а также к сохранению характера сильных разрывов ^±° (t) при их взаимодействии друг с другом (при t = Т4) и с границей полупространства (при t = Т5). Это позволяет легко получить решение задачи в областях VII, VIII: uVII(x, t) = A + Bn (t - T) + Cx, V ’ 71 ^a (t) u VIII (x, t )| „ = A + B8 (t - T) + Cx, o< x <^ (t) 8v 578 T4 = 0.5( T2 (a + b)/ a + T3), T5 = 2T4 -T3, ^ = a(t-T5), A = A + B5(T4 -T2) + a(T4 -T3)(C5 -C7),(15) B7 = 0.5(B4+ B5 - a (C6 - C5)), C7= 0.5(B5- B6 + a (C5+ C6)) / a, A = A7 + B7( T5 - T4), B8 = k3, C8 = (B7-k3)/a + C7. Как показано на рис. 2, в обоих случаях AB и BA при t = T5 возникает волновой пакет из попутных быстрых разрывов {^^, ^4, Ya}, который уже не изменяется с течением времени, если граничные точки продолжают двигаться по закону u (0, t) = y3(t). Таким образом, процедуру решения описанной задачи можно остановить в любой момент t* > Т5, например, руководствуясь оценкой масштаба реального граничного перемещения u(0,t*) , достигнутого к этому моменту времени.
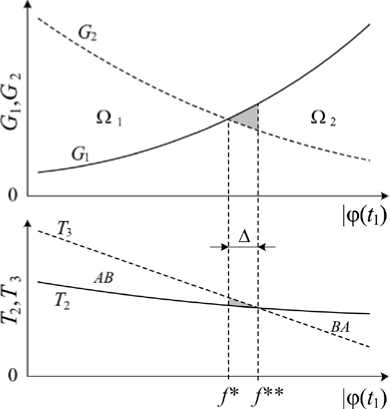
3. Анализ решения На рис. 3 схематически изображена последовательность моментальных кусочно-линейных диаграмм перемещения u(x,r) и деформации u,x (X,т) , соответствующих полученным решениям (9) – (15) при возникновении случая AB (Т2< Т3). На каждой диаграмме момент т принадлежит одному из описанных выше этапов деформирования, условная пространственная координата x имеет свой нормирующий множитель, характерный для выбранного интервала времени: (a) t1<т<12, x = x/(bт); (б) 12<т<Т1, x = x/(G1т) ; (в) T< т < T2, x = x / (G2т); (г) T2< т < T3, x = x / (a т); (д) T3< т < T4, x = x / (a т); (е) т > T5, x = x / (a т). Рис. 3. Результаты поэтапного решения краевой задачи (сценарий AB) Fig. 3. Results of the stepwise solution for the boundary value problem (AB scenario) Несомненно, рис. 3 не отражает всех возможностей развития системы разрывов и полей u , u,x в рассмотренной задаче. Так, на рис. 2 показано, что кусочнолинейная геометрия ударного фронта 21 + S2, которая определяется значениями скоростей G1 и G2 , может изменяться в зависимости от положения узловой точки t1 функции ф(t) в (8). Устремляя данную точку к началу процесса растяжения (моменту 10= 0), мы получаем вогнутую форму фронта 21 +22, так как b< G1< G2< a (см. рис. 2, a); если точка t1 расположена ближе к моменту 12, то разрыв 21 + 22 принимает выпуклую форму при b< G2< G1 < a (см. рис. 2, б). Аналогичного эффекта можно добиться при фиксированном положении узла t1 путем изменения значения ф(t1), т.е. фактически варьируя кривизну функции u (0, t) = Ф( t) на интервале растяжения t е [0;12] (рис. 4). Полученные с учетом (8), (10), (12)–(14) зависимости скоростей G1 , G2 и моментов T2 , T3 от величины | ф(tj)| схематически показаны на рис. 5, где f* = Ф(t1) | G = g2, f ** = Ф(t1) | t2=t3 ; G1 < G2 в области Q3 при | Ф(t1)|< f *, G1 > G2 в Q2 при | ф(t1)|>f *; T2< T, при | ф(t1) |< f ** (сценарий АВ), T2> Т3 при | ф(О l>f ** (сценарий BA). Отметим, что значения f * и f ** в общем случае не совпадают, т.е. существует узкий диапазон A=|f **- f *|~10-3 м, где при G1> G2 волновая картина на этапе 4 (нарастающее сжатие) может развиваться по сценарию BA при T2 > T3 (заштрихованные области на рис. 5). Рис. 4. Функция граничного перемещения с вариацией кривизны на стадии растяжения Fig. 4. Boundary displacement function with curvature variation at the stretching stage Рис. 5. Зависимости параметров решения от значения | ф(г1)| Fig. 5. Dependencies of solution parameters on the value | ф(?1)| Заключение Итак, в статье показано, что кусочно-линейная аппроксимация нелинейных краевых условий динамической задачи позволяет описать процесс возникновения, движения и взаимодействия плоских одномерных волн деформаций в разномодульной упругой среде, не обращаясь к специальным методам типа метода возмущений и др. Полученное с помощью такого подхода кусочно-линейное решение моделирует нелинейный эффект, характерный для динамики деформирования нелинейно-упругих материалов и не описываемый в рамках линейной упругости – возникновение ударной волны сжатия со скоростью, зависящей от динамического поля деформаций по обе стороны от волнового фронта. Данный подход можно использовать для решения нестационарных краевых задач упругой динамики нелинейных и разнопрочных сред с более сложными граничными условиями, чем представленное здесь (например, режимы циклической нагрузки-разгрузки или вибрации), при этом точность решения может быть улучшена путем добавления дополнительных узловых точек аппроксимирующей кусочно-линейной граничной функции. Также результаты работы могут послужить теоретическим дополнением для экспериментальных исследований нелинейного поведения реальных природных и конструкционных материалов под действием высокоскоростных динамических нагрузок. Работа выполнена при частичной поддержке Программы «Приоритетные научные исследования в интересах комплексного развития Дальневосточного отделения РАН» (проект 18-5-002). Acknowledgments This work was supported in part by the Program “Priority Scientific Research for the Comprehensive Development of the Far Eastern Branch of the Russian Academy of Sciences” (project 18-5-002).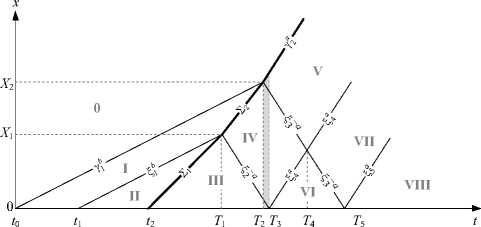
b(t) = A2 + B(‘ — t1) + C2x, A2 = p2, B2 = k2, C2 = -k2 7 b,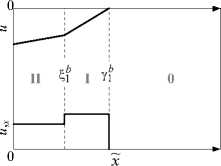
Список литературы Нестационарные одномерные динамические задачи разномодульной упругости с кусочно-линейной аппроксимацией краевых условий
- Капустянский С.М. Анизотропия геоматериалов // Итоги науки и техники. Механика деформируемого твердого тела. - 1987. - Т. 18. - С. 53-113.
- Ставрогин А.Н., Протосеня А.Г. Прочность горных пород и устойчивость выработок на больших глубинах. - М.: Недра, 1985. - 271 с.
- Experimental investigation of the anisotropic mechanical behavior of phyllite under triaxial compression / Guowen Xu, Chuan He, Ang Su, Ziquan Chen // International Journal of Rock Mechanics and Mining Sciences. - 2018. - Vol. 104. - Р. 100-112. DOI: 10.1016/j.ijrmms.2018.02.017
- Динамическое деформирование мягких грунтовых сред: экспериментальные исследования и математическое моделирование / В.В. Баландин [и др.] // МТТ. - 2015. - № 3. - С. 69-77.
- Баклашов И.В., Картозия Б.А. Механика горных пород. - М.: Недра, 1975. - 271 с.
