Неустойчивость скользящего контакта с покрытием на упругой подложке при наличии трения и разогрева от трения

Автор: Зеленцов Владимир Борисович, Митрин Борис Игоревич, Айзикович Сергей Михайлович
Журнал: Advanced Engineering Research (Rostov-on-Don) @vestnik-donstu
Рубрика: Механика
Статья в выпуске: 4 (87) т.16, 2016 года.
Бесплатный доступ
Рассматривается нестационарная динамическая контактная задача термоупругости о скольжении с трением и разогревом от трения жёсткой полуплоскости по поверхности упругого покрытия, сцепленного с упругой подложкой из другого материала. Решение сформулированной начально-краевой задачи записывается в виде контурных интегралов обратного преобразования Лапласа. После изучения изолированных особых точек подынтегральных функций в комплексной плоскости переменной интегрирования решение задачи строится в виде бесконечных рядов по полюсам с добавлением интегралов по берегам разреза. Определяются границы областей устойчивых и неустойчивых решений задачи на множестве её безразмерных параметров. Изучается влияние упругости подложки на границу области неустойчивых решений задачи, а также на развитие температуры и напряжений на скользящем термофрикционном контакте.
Скольжение, контакт, трение, фрикционный разогрев, упругая подложка, динамика, термоупругая неустойчивость
Короткий адрес: https://sciup.org/14250248
IDR: 14250248 | УДК: 539.3 | DOI: 10.12737/22148
Instability of sliding contact with coating on elastic substrate under friction and frictional heating
A nonstationary dynamic contact thermoelasticity problem on sliding with friction and frictional heating of the rigid half-elastic coating surface bonded to an elastic substrate made of another material is considered. The solution to the formulated initial boundary value problem is obtained in the form of contour integrals of the inverse Laplace transform. The investigation of the isolated singularities of the subintegral functions in the complex plane of the integration variable is carried out, and then the problem solution is constructed in the form of infinite series over the poles of integrands with the addition of the integrals over the banks of cut. Boundaries of the stable and unstable problem solutions are determined on its dimensionless parameter set. The influence of the compliance of the substrate on the instability boundary, and also on the development of temperature and pressure at the thermoelastic frictional sliding contact is investigated.
Текст научной статьи Неустойчивость скользящего контакта с покрытием на упругой подложке при наличии трения и разогрева от трения
Введение. Для защиты рабочих поверхностей деталей механизмов и машин широко применяются защитные покрытия — антифрикционные, антикоррозийные, противоизносные и другие. Замечено, что при увеличении скорости функционирования механизмов и машин на скользящем контакте их поверхностей достаточно часто возникает неконтролируемый рост температур и давлений, который может привести к возникновению нештатных ситуаций, предаварийному и аварийному состоянию оборудования. В связи с этим изучение скользящего контакта рабочих поверхностей при наличии покрытий представляет как теоретический, так и практический интерес. Математическому моделированию и решению задач о скользящем контакте с учетом сил трения и разогрева от трения уделялось достаточно много внимания [1–17]. Для определения области неустойчивых решений контактной задачи — области термоупругой неустойчивости (ТУН) скользящего контакта часто применяется метод малых возмущений [1– 8], а для определения решения задач — численные методы [9, 10]. Метод интегрального преобразования Лапласа оказался наиболее универсальным методом аналитического решения задач этого класса [11–17], который не только позволяет построить точное решение задачи, но и определить область устойчивых решений задачи, совпадающую с областью ТУН скользящего контакта. В [1–5, 11–13] исследовались области устойчивых решений квазистатических задач термоупругости о скользящем контакте, а в [6, 7, 14, 17] было показано, что область устойчивых решений динамических задач является подобластью области устойчивых решений квазистатических задач. В настоящем исследовании изучается влияние упругих свойств подложки покрытия на динамику контактных напряжений и температуры при скольжении жёсткой полуплоскости по поверхности покрытия.
Постановка задачи. Рассматривается динамическая задача термоупругости в рамках плоской деформации о скольжении с постоянной скоростью V жесткой полуплоскости I (h ≤ x < ∞) по поверхности x = h упругого покрытия (0 ≤ x ≤ h) , нижняя грань x = 0 которого сцеплена с подложкой (основанием) в виде упругой полуплоскости II (-∞ < x ≤ 0) из другого материала (рис. 1). Скольжение недеформируемой полуплоскости I по поверхности упругого покрытия происходит с учетом кулоновского трения и разогрева от трения. В начальный период времени полуплоскость I деформирует упругое покрытие, смещаясь вдоль вертикали в направлении, противоположном оси x, по закону ∆(t) . Движущаяся полуплоскость I теплоизолирована, а поток тепла, образующийся за счет трения, направлен в упругое покрытие. Кроме того, на границе покрытия и полуплоскости II выполняются условия идеального теплового контакта. Начальная температура полуплоскости II, как и покрытия, равна нулю. В начальный момент покрытие и полуплоскость II находятся в покое. На бесконечности (x → -∞) в полуплоскости II смещения и напряжения исчезают.
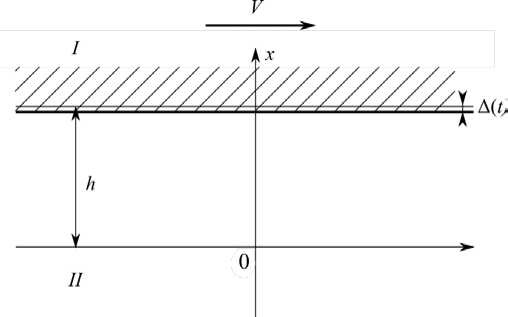
Рис. 1. К постановке задачи термоупругости о скользящем термофрикционном контакте
Представленная задача сводится к решению дифференциальных уравнений термоупругости для покрытия (0 < x < h ) и подложки ( -∞ < x < 0) совместно с уравнениями теплопроводности:
∂ 2 u 1 ∂ 2 u
-
∂ x a ∂ t
1 + ν ∂ T
= α ,0 < x < h , t > 0
1 - ν ∂ x
∂ 2 T 1 ∂ T
-
∂ x 2 κ ∂ t
= 0, 0 < x < h , t > 0
∂ 2 u 1 1 ∂ 2 u 1
-
∂ x a 1 ∂ t
1 + v ∂ T
1 α 1 1
1 - v 1 ∂ x
-∞ < x < 0 , t > 0
∂ 2 T 1 - 1 ∂ T 1 = 0 ∂ x 2 κ 1 ∂ t
-∞ < x < 0 , t > 0
2 µ (1 -ν ) ρ (1 - 2 ν ) ,
a 1 =
2 µ 1 (1 -ν 1 )
ρ 1 (1 - 2 ν 1 )
(0.1)
(0.2)
(0.3)
(0.4)
(0.5)
где µ — модуль сдвига, ρ — плотность, ν — коэффициент Пуассона, α — коэффициент линейного теплового расширения, κ — коэффициент температуропроводности, a — скорость продольной упругой волны, u ( x , t ) , T ( x , t ) — функции распределения смещений и температуры в покрытии (без индекса). Индексом 1 отмечены соответствующие параметры µ 1 , ρ 1 , v 1 , α 1 , κ 1 , a 1 , u 1( x , t ) , T 1( x , t ) подложки.
Граничные условия для дифференциальных уравнений (0.1), (0.2) на верхней поверхности покрытия x = h принимаются в форме:
механическое:
u ( h , t ) = -∆ ( t ) t > 0
(0.6)
температурное: K ^(^’ t ) =- fV с ( h , t ) t > 0 (0.7)
d x
Условие (0.7) означает, что величина потока тепла в покрытие пропорциональна работе сил трения на контакте V т , где т = f с ( h , t ) — касательные напряжения на поверхности покрытия, А ( t ) — закон внедрения, K — коэффициент теплопроводности материала упругого покрытия, f — коэффициент трения, с ( x , t ) — нормальные напряжения в покрытии.
На нижней поверхности x = 0 покрытия выполняются механические условия сцепления покрытия с упругой полуплоскостью II и температурные условия их идеального теплового контакта механические: и(0,t) = и1(0,t) c(0,t) = <^(0,t) t > 0(0.8)
температурные: T(0, t) = T1 (0, t) K ^(^ t) = K1 (^ t) t > 0(0.9)
dx где K1 — коэффициент теплопроводности материала полуплоскости II,
C ( x , t ) — нормальные напряжения в полуплоскости II .
На бесконечности в упругой полуплоскости II смещения и1 (x, t) и напряжения c1 (x, t) исчезают, также как и температура, то есть выполняются условия механические: и 1(-«, t) = 0, C1(-», t) = 0, t > 0 (0.10)
температурные: T1( -« , t ) = 0 t > 0 (0.11)
Связь между напряжениями, смещениями и температурой в покрытии и подложке определяется соотношениями Дюамеля-Неймана [18]
C x,t ) = М-Й. * - М+Й a T ( x , t ) (0.12)
1 - 2 v 8 x 1 - 2 v
d( x , t ) = Y1 " V 1) - Y1 + V 1) a T 1 ( x , t ) (0.13)
1 2 V 1 d x 1 2 V 1
Начальные условия задачи на смещения, их скорости и температура нулевые:
и ( x ,0) = ^I x 0. = и ( x ,0) = d u 1( x ,0) = T ( x ,0) = T ( x ,0) = 0, А (0) = 0 (0.14)
8 1 1 8 1 1
Закон внедрения полуплоскости I в поверхность покрытия А ( t ) имеет активную фазу внедрения на 0 < t < t £ и пассивную на t £ < t < « и принимается в виде
А ( t ) = А 0 [( - 1 + e s t ) H ( t ) H ( t £ - 1 ) + H ( t - 1 £ )] (0.15)
где А 0 , 0 < А 0 < h — глубина максимального внедрения жесткой полуплоскости I в упругое покрытие, t £ = s 1 ln2 ( s > 0) — время активной фазы внедрения, s — параметр закона внедрения, H ( t ) — функция Хэвисайда.
Таким образом, решение рассматриваемой нестационарной динамической контактной задачи термоупругости о скольжении с учетом трения и разогрева от трения жёсткой полуплоскости I по поверхности покрытия на упругой подложке в виде полуплоскости II сводится к совместному решению дифференциальных уравнений термоупругости (0.1), (0.3) совместно с уравнениями теплопроводности (0.2), (0.4) с граничными условиями (0.6) -(0.9), условиями на бесконечности (0.10) -(0.11) и начальными условиями (0.14).
Решение задачи в контурных квадратурах. Применив преобразование Лапласа к дифференциальным уравнениям (0.1) -(0.4) с учётом начальных условий (0.14), к формулам Дюамеля-Неймана (0.12) -(0.13) и граничным условиям (0.6) -(0.9), получим систему четырёх линейных обыкновенных дифференциальных уравнений второго порядка с постоянными коэффициентами относительно трансформант Лапласа искомых функций и ( x , t ), T ( x , t ). После решения системы дифференциальных уравнений относительно трансформант с учётом граничных (0.6) -(0.9) условий в трансформантах и условий на бесконечности (0.10) -(0.11) и применения к ним обратного преобразования Лапласа, получим решение задачи в виде контурных квадратур [19]
7 ~
T ( x , t ) =---- 1--L j o ( z ) NT ( x , z ) R -1 ( z ) ezt dz t > 0, 0 < x < h
1 + v a h 2 n i Г
N T ( x , z ) = V z to ( z ) to 1 ( z ) ( a * ch y z + Ц * sh y z ) x
х
R ( z ) = ( a * sh y z + Ц * ch y z ) to 1 ( z ) Q 1 ( z ) - Y V Q 2( z )
Q 2 ( z ) = —a*^*= ю ( z ) Ю 1 ( z ) + Ю 1 v * a * к *
I х
(0.1)
(0.2)
(0.3)
х
a
to ( z ) = 1 - Y 2 z ,
to 1 ( z ) = 1 -y j 2 к * z ,
a
a * = — , a * = — , к *
a i
a 1
к к
—, Y 1 = —г, Y = к /( ah ), V = a 1 h
к 1
fV a 2 ц (1 + v ) h K 1 - 2 v
_ 2ц (1 - v )/(1 - 2 v ) Ц * = 2 ^ 1 (1 - V 1 )/(1 - 2 V 1 )
, *
_ (1 + v )/(1 - v ) к
= , K = , I
(1 + v 1 )/(1 - v 1 ) K 1 к
h 2
~
t
—, t = —
к
t к
g ( x , t ) = -
2^М — ■ ( z ) (1 - 2 v ) h 2 n i Г ' '
N “ ( x ’ z ) ez7dz R ( z )
0 < x < h , t > 0
0 2 -
N a ( x , z ) = Y z ® 1 ( z ) Z G k ( x , z ) + to, ( z ) G 3 ( x , z )
(0.4)
(0.5)
G 1 ( x , z ) = -y 2 V^z ( a * ch G 2 ( x , z ) = ( a * ch ( y zxh - 1 )
+ Y 2 V 4z Цк*;
I + K * ch ( y[zxh 1 ))
l+
G з ( x , z ) = y V 7
aK
------;= to( z ) + ( YЦ * K * V z v * a *A /к*
—
где Г = { z : - i м + dt к , i м + dt к} — контур интегрирования в комплексной плоскости z, который представляет собой прямую линию, параллельную мнимой оси и отнесенную от нее вправо на величину dt к , в которой d подбирается таким образом, чтобы все полюсы подынтегральных функций в (0.1), (0.4) были бы левее dt к . Функция D ( z ) определяется через трансформанту Лапласа закона внедрения (0.15) и имеет вид
D ( z ) = А 0
2 e - z t вк - 1 1 - e - (z -е t к ) t Ек
--1-- z z -81
к
Re z > e t t к вк
t 8 t к
(0.6)
Исследование подынтегральных функций контурных квадратур в (2.1) и (2.4) показывает, что
D ( z ) N T ( x , z ) R -1( z ) = O ( z - 1/2) при | z | ^»
D ( z ) N a ( x , z ) R -1( z ) = O (1) при | z | ^ м (0.7)
Это означает, что интеграл в (0.4) понимается в обобщенном смысле [20, 21] и для получения его регулярной части необходима регуляризация подынтегральной функции на бесконечности при | z | ^ м . Регуляризация подынтегральной функции в (0.4) производится с помощью выражения
D ( z ) ( ch y zxh - 1 + ( ц * / a * ) sh y zxh 1 )( sh y z + ( ц * / a * ) ch y z ) 1 Y z (0.8)
после чего формула (0.4) для g ( x , t ) принимает вид
g ( x , t )
2 ц (1 - v ) (1 - 2 v ) h
Q ( x , t ) + 1— J D ( z ) 2 n i г
N а ( x , z ) R . ( z )
~ e z dz
0 < x < h , t > 0
(0.9)
Q ( % , t ) = A 0 - 1 t a [ “ z h ] qn [ a ( to - ( % , t ) ) + q A ( to + ( % , t ) ) ] (0.10)
n = 1
to ± ( % , t ) = a - 1 [ at - (2 n - 1) h ± % ]
N a ( % , z ) = N 0 ( % , z ) | sh y z + — ch у z l-y zR ( z ) | ch | у z — ] + — sh | у z — | l (0.11)
( a * J ( ( h J a * ( h ))
R o ( z ) = f sh y z + — ch y z J R ( z ), q = 1 Ц ** (0.12)
( a * J 1 + ц */ a *
Изолированные особые точки подынтегральных функций квадратур решения. Подынтегральные функции полученных квадратур (0.1), (0.9) удовлетворяют лемме Жордана-Гаусса [19], так как имеют алгебраическое убывание на бесконечности. Кроме того, подынтегральные функции в (0.1), (0.9) являются многозначными с точкой ветвления алгебраического типа z = 0. Для получения области однозначного представления подынтегральных функций в комплексной плоскости переменной интегрирования z = ^ + i n проводится разрез от точки z = 0 до точки z = -да вдоль отрицательной части действительной оси. Для вычисления квадратур методами теории функций комплексного переменного необходимо изучение всех изолированных особых точек в комплексной плоскости интегрирования. Полюсы и устранимые особые точки, если такие есть, определяются из трансцендентного уравнения
R ( z ) = 0 (0.1)
где R(z) определена в (0.3). При определении нулей R(z) численными методами в комплексной плоскости z = ^ + in необходимо хорошее нулевое приближение. Анализ уравнения (0.1) производится с помощью содержащихся в R(z) основных безразмерных параметров y и V . При произвольном y , положив V = 0, из (0.1) получим упрощенное уравнение to(z)to1(z)Q0(z)Q[ (z) = 0, (0.2)
где Q 0 ( z ) = a * sh y z + Ц * ch y z , Q [ ( z ) = д/к Т ch V z " + K * sh V z .
Нулями to ( z ) и to [ ( z ) в (0.2), а значит и в (0.1) при V = 0 являются z = Y 2 и z = Y - 2 к- 1 соответственно, которые, однако, не являются полюсами подынтегральных функций, а являются устранимыми особыми точками, так как являются нулями числителей — функций N T ( % , z ) (0.2), N a ( % , z ) (0.11).
Комплексные корни уравнения Q 0 ( z ) = 0 определяются формулой
± 1 1л n / Y q > 0 1 -ц* / a
(0.3)
z 0 n = nln q I ± i ) q = ——, n = 0,1,2, -
2 y [п ( n + 1)2 ) / y q < 0 1 + ц * / a *
и так как 0 < | q | < 1, то z ± n располагаются в комплексной плоскости слева от мнимой оси, а при q = 1 — на мнимой оси.
При решении уравнения Q[ (z) = 0 в комплексной плоскости z с разрезом вдоль отрицательной части действительной оси arg(z) на верхнем листе римановой поверхности изменяется от -п до п : -п < arg(z) < п. На промежуточном этапе решения получается равенство zk
= ^ ^| + i п
к Х> 0
к + 1)2 Х< 0
1 -^/К Т / K *
1 +VK 7 / к * ’
к = 0, ± 1, ± 2, _
(0.4)
при этом Rei
; (^ ) = "2 ln| Х| < 0 при д/К 7 / K * < 1, а Re (V z ) = ln| Х| > 0
ни при каких ^К 7 / K * . Таким образом, V z имеет
Re (V z ) < 0
и находится во 2-ом квадранте с
п /2 < arg
(V z )
< п
или в 3-ем квадранте с
—
п < arg
(v z )
<-п /2. При
возведении в квадрат Vz его arg(z) должен увеличиться в 2 раза, после чего z попадает на другой лист римановой поверхности с п< arg(z) < 2п или с -2п < arg(z) <-п . Ветвь Vz выбирается на верхнем листе выполнением равенства V1 = 1. Отсюда следует, что уравнение Q[ (z) = 0 на верхнем листе римановой поверхности корней не имеет.
Таким образом, z ± n являются нулевыми приближениями для определения множества нулей z n (V) V е [0, да )
при фиксированных значениях у при численном решении уравнения (0.1). При V > 0 на верхнем листе римановой поверхности присутствуют также множества нулей Z.(V) к = 0,1,2,... , V е [Vк, Vk“], где V^, V- — значения V , при котором Z.(V) выходят с нижнего листа римановой поверхности на верхний лист (+) и обратно (-) (при фиксированных остальных параметрах уравнения).
Исходя из физического смысла величин к, a, h, параметр у = к (ah)-1 может принимать только положительные действительные значения. Отношение к/а имеет размерность длины и для большинства материалов составляет величину порядка 1-30 нм. Поэтому практический интерес представляют значения 0 < у < 1.
Расположение нулей функции R(z) (0.3) при V е [0, да) и фиксированном у = 10 2 иллюстрирует рис. 2. Цвет траектории отражает значение ц*, которому соответствует траектория (значения приведены на рисунке). Множества z± (V) n = 1, 2, 3 представляются траекториями, похожими на незаконченные эллипсы (рис. 2). Начальные точки траектории z±n = z± (0) определяются формулой (0.3). Стрелки на траекториях показывают направление перемещения mzn (V) по траектории при изменении V от 0 до да и указывают на точку сгущения, к которой стремится z± (V) n = 1, 2, 3 при V ^да. При увеличении ц*, что соответствует уменьшению жесткости подложки относительно покрытия, z±n перемещаются влево, а вместе с ними смещаются и множества z± (V), что приводит к увеличению величины V, при которой zn (V) приобретает положительную действительную часть. Следует отметить, что множества z± начинаются слева от мнимой оси, а заканчиваются в точке сгущения ck. = lim z± (V) справа (ц* = 10-5) V ^да или слева (ц* = 1, 2,1, 2,3). Дальнейшее увеличение ц* приводит к тому, что траектории нулей z± (V) оказываются полностью в левой полуплоскости, и Re(z± (V^)) < 0 при любых значениях V е [0, да).
м!т(.-)
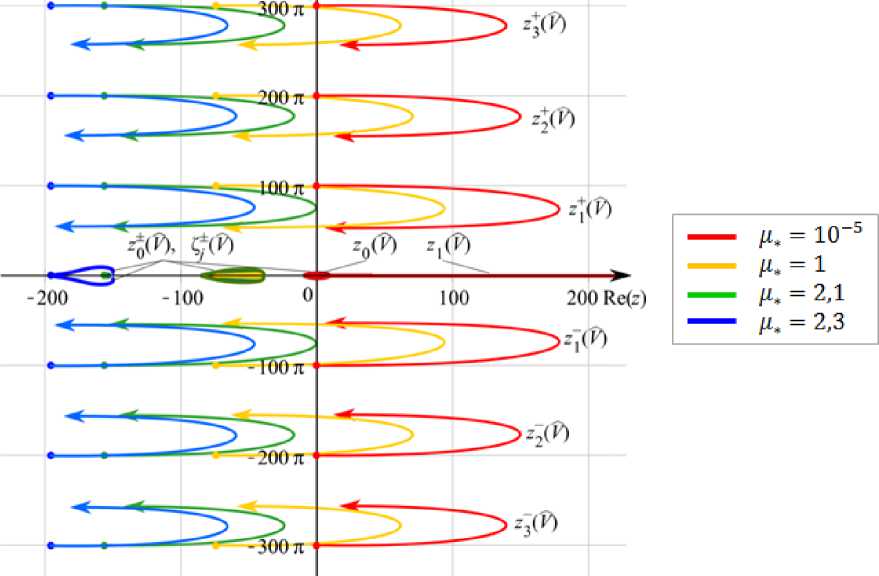
Рис. 2. Расположение нулей функции R ( z ) (0.3) в комплексной плоскости при V е [0, да ) и различных значениях ц * (обозначены цветом)
Пары нулей z + (V) = zq (V) располагаются вблизи действительной оси и при изменении V от 0 до 7 сначала отдаляются от нее, находясь слева от мнимой оси, затем пересекают мнимую ось, после чего вновь приближаются к действительной оси уже справа от мнимой оси и при некотором V переходят на действительную ось, превращаясь в нули zq (V) и z 1 (V). Первый из них при дальнейшем увеличении V устремляется по действительной оси в точку ветвления, располагающуюся в начале координат, и покидает верхний лист римановой поверхности, в то время как второй устремляется по действительной оси в положительном направлении. При этом, чем значение ц* ближе к 0, тем более «стянутой» к началу координат оказывается вся траектория zQ(V') . Таким образом, после того, как z±(V) в первый раз пересекает действительную ось, в правой полуплоскости всегда присутствует нуль, являющийся полюсом подынтегральных функций в (Q.1), (Q.9) для T(x, t), g(x, t).
Заметим, что для zn и Z ± выполняются соотношения сопряженности z„+= z„ , Z +=Zk n,k = Q,1,2,_ (Q.5)
Таким образом, нули характеристического уравнения или определителя системы (q.1), с одной стороны, являются собственными значениями начально-краевой задачи (Q.1) -(Q.14), а с другой — полюсами подынтегральных функций контурных квадратур решения задачи в (Q.1), (Q.9).
Решение задачи. Полученные сведения об изолированных особых точках подынтегральных функций в (Q.1), (Q.9) позволяют вычислить эти интегралы методами теории функций комплексного переменного [22] и представить решения задачи — температуру и напряжения в виде функциональных рядов по полюсам подынтегральных функций и несобственных интегралов по берегам разреза
Z 2
T ( x , t ) = 1--- ^V A Q I Sk ( x , ~ ) H ( ( - 1) k ( ~ - t EK ) ) Q < x < h , t > Q
(Q.1)
1 + v a h k = 1
c ( x , t ) = -
1^^ A Q Q ( x , t ) + I S k ( x ,~ ) H ( ( - 1) k ( ~ - t (1 - 2 v ) h L k = 1
k = 1
1Ек ) ) Q < x < h , t > Q
~ в которых t , Q(x, t) из (Q.3), (Q.1Q). Функции Sk (x, t) k = 1,2 вычисляются по формулам
S 1 ( x , t ) = G ( x , t ) + 5 1 ( x , t ), S 2 ( x , t ) = G ( x , t ) - 2 G ( x , t - 1 eK ) + 5 2 ( x , t )
G(x, t) = I [g- (z+ )K‘(z+, x, t)+ 0- (zk )K‘(zk, x, t)]+ k=Q
+ I [ g- ( z + ) k ‘ ( z + , x , t ) +g- ( z k ) K ‘ ( z - , x , t ) ]
k = Q
5 1( x , t ) = K ( e t K , x , t ) - K (Q, x ,Q) + J 1( x , t ), 5 2( x , t ) = K (Q, x ,Q) + J 2( x , t )
1 7 + N ( x , - i ^ , -9 N ( x , i V^ , -^ )
J ( x , t ) , 'g ©Q ( x , ^ ) d ^ , Q ( x , ^ ) = —T—/=— X— T1V —T
2 n i q R ( - i Д , -Z ) R ( i ТЁ , -Z )
(Q.2)
(Q.3)
(Q.4)
(Q.5)
N ( x , z ) / x
=-------- exp( zt )
R '( z )
e t к z ( z ±e t к )
K ( z , x , t ) = N ( x ’ z ) exp( zt ), K '( z , x , t ) = R ( z )
K (Q, x ,Q) = lim N ( x ’ z ) , G ± ( z ) = - z ^ Q R ( z ) :
В формулах (Q.5) введены обозначения
N ( x , z ) = N ( x , V z , z ) , R ( z ) = R (V z , z ) для отслеживания поведения этих функций на берегах разреза.
Области устойчивых и неустойчивых решений. Функция G ( x , t ) (Q.4) из Sk ( x , t ) (Q.3) содержит два бесконечных ряда — по z + и по Z +
G ( x , t ) = S + ( x , t ) + S - ( x , t )
(Q.1)
S + (x,t) = Ib(x,zk^ezt, S-(x,t) = Ib(x,Z +)eZ+t k =1 k =Q
N ( x , z ) ‘ ( x , z ) = 0 ( z ) —
Если все Re ( z +)< 0 и Re ( z + ) < 0 n , к = 0,1,2, . для 0 < V < V 0 , то есть все z + и Z + находятся левее мнимой оси рис. 2, а при V > V 0 хотя бы один из них - z + * или Z + * — находится справа - Re ( z + * ) > 0 или Re ( z + * ) > 0 , то область V S е [ 0, V 0 ] при фиксированных других параметрах ц * , у , a * , . называется областью устойчивых решений задачи, а V U е V 0 , да ) называется областью неустойчивых решений задачи. Если у одного из полюсов z + * (или Z + * ) Re ( z + * ) > 0 или Re ( z+ * ) > 0, то один из рядов в (0.1) становится расходящимся, а решение его содержащее — неустойчивым. Чтобы показать это, достаточно перестроить ряд S + ( x , t ) в (0.1) для z + * , у которого Re ( z + * ) > 0 , по формуле
S + ( x , t ) = b ( x , z + * J1 + £ Bn ( x , z k ) exp ( — ( z + V к = 1
—
z k ) ) ) exP ( z + * t ) , B n ( x , z ) =
b ( x , z ) b ( x , z n )
из которой видно, что ряд в скобках сходится, но за счет множителя explz+*t) lim S+ (x, t) = да и такое решение, t ^да содержащее z+*, неустойчиво.
При анализе траекторий полюсов z + и Z + n, к = 0,1,2, . , изображенных на рис. 2, при изменении V от 0 до да следует отметить, что полюса движутся по своим траекториям с разной скоростью: наибольшей скоростью среди них обладает z ( , z + или Z + ■ С увеличением V один из этих полюсов первым пересекает мнимую ось, пусть,
ˆˆ
ˆˆ
например, при V = V crit , после чего при V > V crit
Re ( z + ) > 0 и решение задачи неустойчиво, независимо от того,
пересекли или нет мнимую ось другие полюса. Вывод заключается в том, что область устойчивых решений задачи V e [ o, V crit ] , область неустойчивых решений задачи — V е ( V crit, да ) при фиксированных других параметрах задачи: Y , ц * , a * , . . Полюсы Z ± к = 1,2, . имеют Re ( z ± ( V )) < 0 при V е [ 0, да ) и не образуют неустойчивых решений.
На рис. 3 представлены графики изменения границы между областью устойчивых решений (ОУР) и неустойчивых решений (ОНР) в зависимости от параметров V =у V , ц * , у при K * = 6,5, к * = 5, V * = 1,2, а * = 2,2, р * = 0,4, a * = ^ ц * /р * . При ц * ^ 0 и ц * ^ да решения задачи II неустойчивы при сколь угодно малых V > 0 или V > 0.
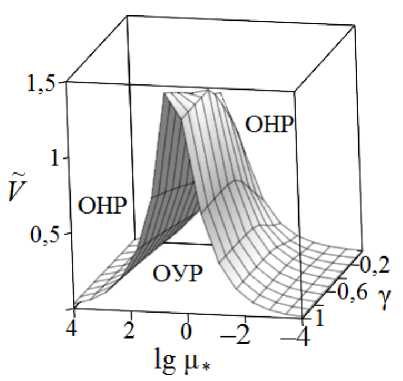
Рис. 3. Граница области устойчивых и неустойчивых решений задачи в пространстве (lg ц * , у , V )
Численный анализ решения задачи. Чтобы проиллюстрировать влияние упругих и теплопроводных свойств подложки на решение задачи, на рис. 4 а , б приведены графики температуры ( а ) и напряжений ( б ) на контакте. Графики получены при значениях параметров задачи, соответствующих покрытию из алюминия толщиной h = 2 мм. Принимались следующие значения параметров материала покрытия: μ = 25,5 ∙ 109 ГПа, ρ = 2,7 ∙ 103 кг/м3, a = 6,24 ∙ 103 м/с, ν = 0,34, K = 0,21 ∙ 103 Вт/(м ∙ К), α = 22,9 ∙ 10–6 1/К, κ = 87,4 ∙ 10–6 м/с2. Скольжение осуществляется со скоростью V = 0,15 м/с при коэффициенте трения f = 0,15. Параметры закона внедрения А( t ) (0.15): А0 = 0,01 h , v 0 =
0,05 мм/с, ε = 10 1/с, t ε = 6,93 ∙ 10–2 с. Безразмерные величины γ , V ˆ принимают следующие значения: γ = 7 ∙ 10-6, V ˆ = 1,052. При этом значения параметров подложки вычисляются через µ * , a * , K * , κ * , значения которых указаны в таблице 1. Значения остальных безразмерных параметров задачи принимаются следующими: ρ * = 0,346, ν * = 1,192, α * = 1,924 (что соответствует покрытию из алюминия на подложке из углеродистой стали).
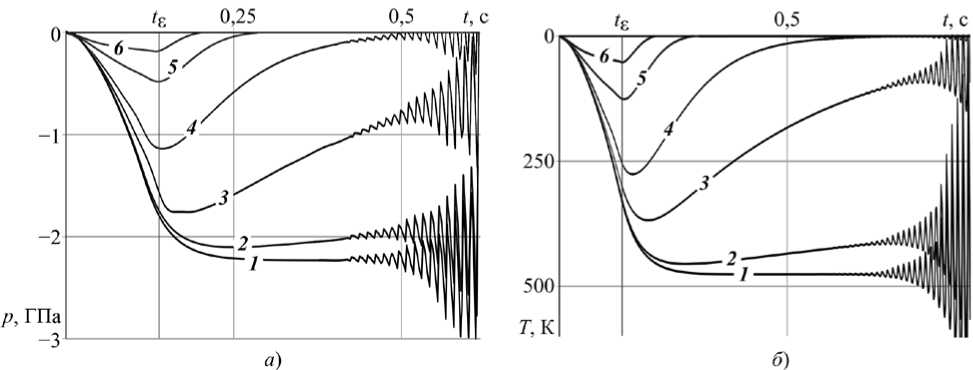
Рис. 4. Графики напряжений p(t) = -σ(h, t) и температуры T(h,t) на скользящем термофрикционном контакте при различных значениях параметров μ , a , K , κ
Таблица 1
Значения безразмерных параметров μ , a , K , κ , использовавшиеся для построения графиков на рис. 4
|
Номер графика |
μ* |
a * |
K * |
κ * |
|
1 |
4,264 ∙ 10-19 |
1,110 ∙ 10-9 |
4,610 ∙ 10-18 |
6,906 ∙ 10-18 |
|
2 |
4,264 ∙ 10-15 |
1,110 ∙ 10-7 |
4,610 ∙ 10-14 |
6,906 ∙ 10-14 |
|
3 |
4,264 ∙ 10-13 |
1,110 ∙ 10-6 |
4,610 ∙ 10-12 |
6,906 ∙ 10-12 |
|
4 |
4,264 ∙ 10-12 |
3,510 ∙ 10-6 |
4,610 ∙ 10-11 |
6,906 ∙ 10-11 |
|
5 |
8,529 ∙ 10-12 |
4,964 ∙ 10-6 |
9,220 ∙ 10-11 |
1,381 ∙ 10-11 |
|
6 |
4,264 ∙ 10-11 |
1,110 ∙ 10-5 |
4,610 ∙ 10-10 |
6,906 ∙ 10-10 |
|
* |
4,264 ∙ 10-1 |
1,110 ∙ 100 |
4,610 ∙ 100 |
6,906 ∙ 100 |
В последней строке таблицы приведены данные для основания из углеродистой стали (для сравнения).
Графики 1 решений динамической задачи, изображенные на рис. 4 а , б , совпадают с соответствующими графиками решений задачи для полосы на жестком основании [14]. С уменьшением жесткости основания (увеличением µ * ) величина напряжений и температуры на контакте стремительно падает, несмотря на ослабление теплопроводных качеств основания (увеличение K * ), что демонстрируют графики 2 – 6 рис. 4. Заметим, что на графиках 2 – 6 рост температуры и напряжений сменяется их убыванием сразу ( 5 , 6 ) или спустя некоторое время ( 2 , 3 , 4 ) после момента t ε окончания активной фазы внедрения жёсткой полуплоскости I в покрытие.
Графики 1 – 4 демонстрируют термоупругодинамически неустойчивое решение задачи, на графиках 5 – 6 изображено устойчивое решение. Заметим, что рост амплитуды напряжений σ( h , t ) несколько опережает рост температуры на контакте T ( h , t ).
Заключение. Исследование решения нестационарной динамической контактной задачи термоупругости о скользящем контакте с учётом трения и разогрева от трения жёсткой полуплоскости с поверхностью упругого покрытия на упругой подложке из другого материала показывает, что основное влияние на напряжения и температуру на контакте в первую очередь оказывают механические характеристики покрытия и подложки, и только во вторую очередь — температурные.Границы области устойчивости также наиболее существенным образом зависят от механических характеристик контакта и в первую очередь от отношения жёсткостей покрытия и подложки — параметра µ * . При приближении µ * к единице ( µ * → 1 ) ширина области устойчивых решений в плоскости µ *, V ˆ принимает наибольшее значение, тогда как при µ * → 0 или µ * → ∞ ширина области уменьшается до сколь угодно малой величины.
Правильный подбор материалов покрытия и подложки на этапе конструирования триботехнических устройств позволяет улучшить их эксплуатационные характеристики, практически исключить возможность возникновения термоупругодинамической неустойчивости и обеспечить безаварийную эксплуатацию триботехнических устройств.
Список литературы Неустойчивость скользящего контакта с покрытием на упругой подложке при наличии трения и разогрева от трения
- Dow, T. A. Thermoelastic instability of sliding contact in the absence of Wear/T. A. Dow, R. A. Burton//Wear. -1972. -Vol. 19, no. 3. -P. 315-328.
- Burton, R. A. Thermoelastic instability in a seal-like configuration/R. A. Burton, V. Nerlikar, S. R. Kilaparti//Wear. -1973. -Vol. 24, no. 2. -P. 177-188.
- Barber, J. R. Stability of Thermoelastic Contact for the Aldo Model/J. R. Barber//J. Appl. Mech. -1981. -Vol. 48, no. 3. -P. 555-558.
- Моров, В. А. Термоупругая неустойчивость фрикционного контакта штампов с полупространством/В. А. Моров, И. Н. Черский//Трение и износ. -1985. -Т. 6, № 1. -С. 27-38.
- Ciavarella, M. Interaction of thermal contact resistance and frictional heating in thermoelastic instability/M. Ciavarella //Int. J. Solids Struct. -2003. -Vol. 40, no. 21. -P. 5583-5597.
- Afferrante, L. Sliding thermoelastodynamic instability/L. Afferrante, M. Ciavarella, J. R. Barber//Proc. R. Soc. A Math. Phys. Eng. Sci. -2006. -Vol. 462, no. 2071. -P. 2161-2176.
- Afferrante, L. A note on thermoelastodynamic instability (TEDI) for a 1D elastic layer: Force control/L. Afferrante, M. Ciavarella//Int. J. Solids Struct. -2007. -Vol. 44, no. 5. -P. 1380-1390.
- Mao, J.-J. Thermoelastic contact instability of a functionally graded layer and a homogeneous half-plane/J.-J. Mao, L.-L. Ke, Y.-S. Wang//Int. J. Solids Struct. -2014. -Vol. 51, no. 23-24. -P. 3962-3972.
- Yi, Y.-B. Effect of convective cooling on frictionally excited thermoelastic instability/Y.-B. Yi, A. Bendawi//Wear. -2012. -Vol. 296, no. 1-2. -P. 583-589.
- Yi, Y.-B. Finite element analysis of thermoelastic instability in intermittent sliding contact/Y.-B. Yi //J. Therm. Stress. -2014. -Vol. 37, no. 7. -P. 870-883.
- Слоновский, Н. В. О термоупругой устойчивости при трении скольжения/Н. В. Слоновский//Прикладная математика и механика. -1969. -Т. 33, № 1. -С. 117-121.
- Пырьев, Ю. А. Анализ устойчивости термоупругого контакта в трибосистеме типа радиальных уплотнений цилиндра/Ю. А. Пырьев, Ю. И. Мандзик//Трение и износ. -1996. -Т. 17, № 5. -С. 621-628.
- Евтушенко, А. А. Влияние изнашивания на развитие термоупругой неустойчивости фрикционного контакта/А. А. Евтушенко, Ю. А. Пырьев//Известия РАН. Механика твердого тела. -1997. -№ 1. -С. 114-121.
- Зеленцов, В. Б. Термоупругодинамическая неустойчивость решения контактной задачи для покрытия с учетом тепловыделения от трения/В. Б. Зеленцов //Вестник ДГТУ. -2014. -Т. 14, № 4. -С. 17-29.
- Zelentsov, V. B. Instability of solution of the dynamic sliding frictional contact problem of coupled thermoelasticity/V. B. Zelentsov //Mater. Phys. Mech. -2015. -Vol. 23. -P. 14-19.
- Зеленцов, В. Б. Неустойчивость скользящего термофрикционного контакта жесткого тела с упругим покрытием, содержащим пьезокерамическую прослойку/В. Б. Зеленцов //Известия высших учебных заведений. Северо-Кавказский регион. Естественные науки. -2015. -№ 4. -С. 52-60.
- Зеленцов, В. Б. Динамическая и квазистатическая неустойчивость скользящего термофрикционного контакта/В. Б. Зеленцов, Б. И. Митрин, С. М. Айзикович//Трение и износ. -2016. -Т. 37, № 3. -С. 280-289.
- Новацкий, В. Вопросы термоупругости/В. Новацкий. -Москва: Изд-во АН СССР, 1962. -363 с.
- Диткин, В. А. Интегральные преобразования и операционные исчисления/В. А. Диткин, А. П. Прудников. -Москва: Физматлит, 1961. -524 с.
- Виленкин, Н. Я. Функциональный анализ/Н. Я. Виленкин ; под ред. С. Г. Крейна. -Москва: Наука, 1964. -425 с.
- Брычков, Ю. А. Интегральные преобразования обобщенных функций/Ю. А. Брычков, А. П. Прудников. -Москва: Наука, 1977. -288 с.
- Тихонов, А. Н. Уравнения математической физики/А. Н. Тихонов, А. А. Самарский. -Москва: Наука, 1977. -735 с.
