Носимые и переносные лазерные приборы для спецтехники

Бесплатный доступ
Короткий адрес: https://sciup.org/14967077
IDR: 14967077
Текст обзорной статьи Носимые и переносные лазерные приборы для спецтехники
НОСИМЫЕ И ПЕРЕНОСНЫЕ : ЛАЗЕРНЫЕ ПРИБОРЫ ДЛЯ СПЕЦТЕХНИКИ
Активно-импульсные (АИ) лазерные приборы ночного видения (АИ ПНВ) или АИ низкоуровневые телевизионные системы (АИ НТВС) используют импульсный подсвет объекта наблюдения и синхронизированное с ним импульсное управление (стробирование) электронно-оптического преобразователя изображения (ЭОП), установленного в приемной части ПНВ [1]. Их принцип действия, возможности и конкретные устройства рассмотрены в работах [1, 2]. Здесь остановимся только на тех моделях АИ ПНВ, которые не вошли в указанные выше работы. АИ НТВС Laser-illuminated viewing and ranging (LIVAR) EBCCD [3] выполнена с использованием импульсного лазерного осветителя на базе твердотельного лазеры на АИГ:Nd+ с рамановской ячейкой изменения частоты. Осветитель генерирует энергию в импульсе 6 мДж на длине волны 1,57 мкм, имеет рабочую частоту 30 Гц и расходимость излучения 1 – 50 мрад. В приемной части прибора установлен зеркально-линзовый объ- ектив (фокусное расстояние 1250 мм и относительное отверстие 1:10), сфокусированный на гибридно-модульный преобразователь (ГМП) изображения с электронной бомбардировкой матрицы ПЗС (EBCCD) [1, 2]. ГМП имеет так называемый ТЕP-фотокатод (ТЕР – Transferred Electron Photocathode), работающий в области спектра 0,9 – 1,85 мкм (рис. 1) [3]. При работе в АИ-ре-жиме прибор имеет дальность действия 5 км, разрешение по дальности 1 фут (30,48 см), минимальную длительность строба 50 нс. Разрешающая способность ГМП составляет 35 штр/мм, а квантовый выход ТЕР-фотокатода на длине волны 1,5 мкм равен 15%. АИ ТНВС объединена с тепловизионной (ТПВ) системой FLIR, выполненной на основе неохла-ждаемой матрицы микроболометров. Широкопольная ТПВ-система FLIR служит для поиска и обнаружения объектов наблюдения, а узкопольная АИ НТВС – для их распознавания. Фирма OBZERV (Канада) разработала АИ НТВС ATV-2000i, выполненную на базе ГМП (ЭОП поколения 3 или 2+ –
XD-4; XR-5, стыкованный с матрицей ПЗС 640×480 пикселей). Лазерный осветитель на основе неохлаждаемой решетки лазерных диодов излучает на длине волны 0,808 или 0,86 мкм, угол подсвета может регулироваться с помощью ZOOM-объектива, энергопотре-
– ФГУП «Альфа», ведущий научный сотрудник.
Рис. 1. Кривые спектральной чувствительности фотокатодов: 1 – на основе GaAsP;
2 – на основе GaAs;
3 – ТЕР-фотокатода
бление – 15 Вт. В приемной части АИ НТВС также установлен ZOOM-объектив с минимальным полем зрения 0,21×0,16° или 0,82×0,62° и диаметром входного зрачка 200 мм (относительное отверстие изменяется от 1:5 до 1:20). Увеличение может изменяться от 45 х до 180 х . Масса комплекта АИ НТВС составляет не более 65 кг, габариты 620×550×450 мм, энергопотребление не более 350 Вт при питании от сети ~ 100 – 240 В. В состав системы входит также дневная цветная ТВ-камера с полем зрения, изменяемым от 2 до 45°, а также система GPS [4]. Дальность распознавания ростовой фигуры человека составляет 5 км, идентификации автомашины – 10 км, считывания номера автомашины – до 2 км.
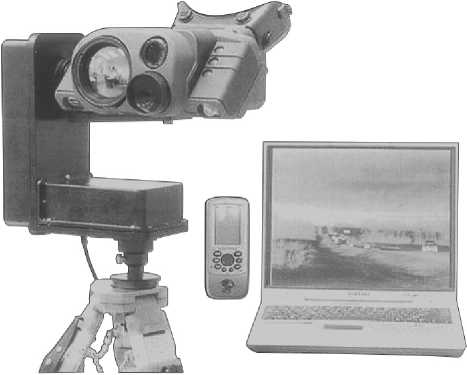
Та же фирма разработала ATV-500 в двух модификациях: ATV-500р и ATV-500i. Модель ATV-500р имеет массу 4,8 кг, габариты 330×26×140 мм, энергопотребление не более 40 Вт, время непрерывной работы 2,5 – 5 ч. Модель ATV-500i имеет массу 3,9 кг, габариты 330×190×140 мм, энергопотребление не более 25 Вт при питании от батареи =12 В. Прибор выполнен на базе ГМП (ЭОП поколения 3 или 2 + – XR-5, стыкованный с матрицей ПЗС 640×480 пикселей). Жидкокристаллический дисплей имеет диагональ 7 дюймов. Пределы стробирования составляют 50 мм – 2,5 км при длительности строба от 20 до 250 м. Приемный ZOOM-объектив имеет минимальный угол поля зрения 0,72×0,54° при увеличении 50 х и диаметре входного зрачка 89 мм. Лазерный осветитель на основе неохлаждаемой решетки лазерных диодов излучает на длине волны 0,854 мкм, угол подсвета может регулироваться с помощью ZOOM-объектива, энергопотребление – до 2 Вт. Дальность распознавания ростовой фигуры человека – 0,5 км, идентификации автомашины – 1,5 км, считывания номера автомашины – 0,3 км [5]. Двухканальный прибор обнаружения «Зарница», разработанный филиалом ИФП СО РАН «КТИ ПМ» [6] (фото 1) , содержит ТПВ-канал и канал АИ НТВС. Прибор может работать круглосуточно и при пониженной прозрачности атмосферы. Прибор имеет ручной и переносной варианты исполнения. Во втором случае прибор устанавливается на треногу – опорно-

Фото 1. Двухканальный прибор «Зарница»: а) – ручной вариант исполнения на мини-треноге; б) – вариант исполнения на опорно-поворотном устройстве с приводами и комплектом внешних устройств
поворотное устройство с приводами управления, цифровую связь с внешними устройствами по интерфейсам Ethernet и RS-432, выдачу изображения на внешний монитор в стандарте VESA. В составе внешних устройств предусмотрено применение портативного компьютера (отображение полученного изображения, управление режимами прибора, ручное наведение приводов и автоматическое сканирование заданного участка местности), GPS и пульта управления на базе карманного персонального компьютера с приемником спутниковой навигации. Вывод изображения осуществляется на псевдобинокулярный цветной микродисплей на базе двух матриц органических светодиодов (OLED) формата 800×600. Дисплей снабжен оптической системой «виртуальный сферический экран» 27×20°, обеспечивающий естественное зрительно восприятие, высокое качество изображения и меньшую утомляемость глаз вследствие размещения виртуального изображения на сферическом экране, не требующем перефокусировки глаз по полю зрения. Микродисплей не требует диоптрийной регулировки и подстройки межзрачкового расстояния. Корпус прибора выполнен из ударопрочной пластмассы с шумопоглощающим обрезиниванием. ТПВ-ка-нал выполнен на базе неохлаждаемой матрицы микроболометров с числом пикселей 384×288, работающей в области спектра 8 – 14 мкм. ТПВ-канал
б
имеет рекордно низкое энергопотребление – 1,4 Вт при общем энергопотреблении прибора 8 Вт. АИ-канал выполнен на основе ГМП: ЭОП + матрица ПЗС формата 576×784. Импульсный лазерный осветитель излучает на длине волны 0,83 мкм. Предусмотрено автоматическое и ручное стробирование наблюдаемого пространства. Угол поля зрения прибора 7×9°, дальность обнаружения подвижных транспортных средств 4 – 5 км, распознавания объекта бронетанковой техники (лоб) – 0,8 км, распознавания ростовой фигуры человека – 0,65 км. Минимально обнаруживаемая разность температур в ТПВ-канале – 0,1 °С, диапазон рабочих освещенностей ТПВ-канала и НТВС в АИ-режиме не ограничен, НТВС в пассивном режиме: 10 -4 – 10 5 лк. Масса прибора до 5 кг, диапазон рабочих температур: –30…+40 °С. АИ-канал обеспечивает обнаружение оптических приборов наблюдения по бликам, отраженным от них при воздействии зондирующего излучения лазерного осветителя. При этом дальность обнаружения оптических приборов класса ПСО-1 при окружающей освещенности 1 лк составляет 1 км. Обнаружение по бликам оптических, оптико-электронных и НТВС наблюдения и прицеливания может быть также достигнуто с помощью прибора обнаружения оптико-электронных средств, разработанного ФГУП «НПО АСРОФИЗИКА» [7]. Разведка местности осуществляется при ее сканирова-

нии вручную. Обнаружение объекта сопровождается звуковой сигнализацией. Это позволяет определить направление на бликующий объект и определить его положение на местности. Прибор состоит из блока обнаружения, блока визирования, блока питания и телефонной гарнитуры. Блок обнаружения устанавливается на блок визирования (бинокль). Блок питания соединен с блоком обнаружения кабелем. Телефонная гарнитура, выполненная в виде шлемофона с одним наушником, соединяется с блоком питания кабелем. Прибор обнаружения выполнен в двух вариантах: с биноклем Б8Мх30 и с биноклем Б10х42. Дальность обнаружения бликующих целей в полевых условиях 200…2350 м, в городских – 70…1450 м, скорость обзора по горизонту не более 15 град/с, точность определения дальности ±10 м, время непрерывной работы 8 ч, масса изделия с биноклем Б8Мх30 – 3,4 кг, габариты блока обнаружения 109×117×155,5 мм, блока питания 36,5×65×155 мм.
Фирма RAFAEL (Израиль) [8, 9] разработала комбинированный прибор обнаружения снайперов Spotline Mk-2. Прибор содержит ТПВ-канал, НТВС с ZOOM-объективом, лазерный дальномер, GPS. Прибор устанавливается на опорно-поворотном устройстве.
Прибор «Призрак-М (ТЛС 2000) фирмы «ТАЛОС» [10] для обнаружения объектов наблюдения по бликам зондирующего лазерного излучения имеет угол поля зрения 5,5×4,1°, зоны подсвета: поле подсвета 4×3°, глубина подсвета 10; 20; 50; 500 м, дальность до объектов в зоне подсвета от 10 до 2500 м, время непрерывной работы 2 ч, диапазон рабочих температур –14…+45 °С, массу 1,8 кг, габариты 235×145×70 мм, энергопотребление до 10 Вт.
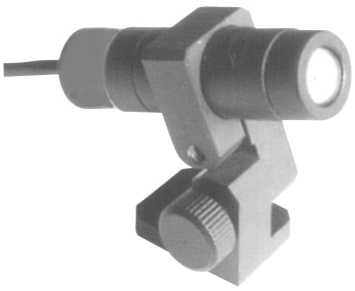
Для создания лазерных «указок» в целях применения в технике лазерных целеуказателей, медицинской технике, охранных системах, для проведения юстировочных и разметочных работ используются лазерные модули видимого синего цвета (длина волны 0,457; 0,473 мкм) зеленого цвета (длина волны 0,532 мкм), красного цвета (длина волны 0,635 – 0,66 мкм) и ИК (длины волн 0,808; 0,98 мкм) с коллимированным пучком излучения малой расходимости. Основные параметры лазерных модулей приведены в т абл. 1 [11], а типичный

Фото 2. Лазерный модуль ИК-излучения

Фото 3. Инфракрасный термометр LaserSight® внешний вид – на фото 2. На основе такого лазерного модуля был создан инфракрасный термометр LaserSight® (фото 3) [12]. Он обеспечивает профессиональное неконтактное измерение температуры в пределах –35…+900 °С. В короткофокусном режиме пирометр измеряет температуру объектов с диаметром 1 мм. При этом 2 лазерных луча точно указывают зону измерения. В длиннофокусном режиме лазерный целеуказатель с разрешением 75:1 указывает реальный размер зоны наблюдения на любом расстоянии. Минимальный диаметр измерения 16 мм на расстоянии 1,2 м. Спектральный рабочий диапазон пирометра 8 – 14 мкм, разрешение 0,1 °С, точность ±0,75% от измеряемой величины. Лазер имеет 2 класс безопасности. Питание прибора – 3 В, масса 0,42 г, время непрерывной работы 5 ч с включенным лазером. В пирометре MiniSightPlus фирмы ООО
«Сенсорика-М» [13] лазерное целеуказание обеспечивает разрешение 20:1 и точное измерение объекта диаметром 13 мм на любом расстоянии в пределах 1,4 м. Диапазон измерения –32… +530 °С, точность измерений ±1%, температурное разрешение 0,1 °С, рабочий спектральный диапазон 8 – 14 мкм, масса прибора 0,15 кг, габариты 190×38×45 мм, питание =9 В. Лазер с мощностью менее 1 мВт имеет луч сечением 9 мм и класс безопасности 2а.
Та же фирма [14] разработала лазерный датчик приближения – светоотражающий барьер со сквозным лучом (оптическая линия F 18-1). Рабочее напряжение составляет 10 – 30 В, частота 333 Гц, ток потребления менее 30 мА. Для датчика приближения красного света рабочий диапазон составляет 400 мм, для ИК-света – 800 мм. Световозвращающий барьер для ИК-света равен 2 – 4 м, для красного света с поляризующим фильтром 1 – 2 м, для сквозного лазерного датчика рабочий диапазон 8 м.
Для обнаружения очень малых объектов размером 0,2 мм используется теневой лазерный датчик FS/FE 12 RL той же фирмы [15]. Диапазон измерений 5 м, напряжение питания =10 – 30 В, частота 10 кГц, ток потребления 100 мА. Используется лазер с длиной волны 0,65 мкм, класс безопасности – 2. Для проведения строительных, деревообрабатывающих и геодезических работ используются лазерные указатели направления [16]. Они применяются для контроля высоты, соосности, наклона, при выравнивании и других работах как самостоятельно, так и совместно с промышленными уровнями, тахеометрами, нивелирами и пр. Мощность излучения может составлять от 1 – 2 до 1 – 30 мВт, длина волны 0,65/0,67 мкм, дальность действия 25 – 45 м или 30 – 150 м, диаметр пучка на расстоянии 25 м не более 10 – 15 мм, время непрерывной работы 8 – 20 ч, диапазон рабочих температур –40…+40 °С, масса 0,2 кг, габариты 150×35×30 мм.
В частности, лазерный уровень УЛ-01 ( фото 4а ) имеет высокую точность – 0,3 мм/м. Красный луч лазера строго параллелен базовой плоскости. Две призменные насадки позволяют задавать не только горизонтальную, но и вертикальную плоскости. Построитель зенитно-надирной линии ПЗНЛ-
|
ф у td У ф 3 У а С |
3 к О ф ф СО со ф в с 3 3 у а Ф со cd < СУ 3 cd а К |
у ь о 3 о ь и к У СО У |
о со о у ь о у |
у ь о У ф У В |
X к « >к ft Я О 3 |
к « >к ft ж о 3 |
>к У к ф а ф |
о о |
>к У К ф а ф |
>к У к ф а ф |
о ф |
ь о о и У У ф У У |
У н о У о н и У У ф У У |
X к « >к й к ft ж о 3 |
S к О ■о 1 1О со ф. У У а с 3 2 У и У с 3 СП с М и У с 3 3 У а ф СП 3 У и rd а « |
к В а я о |
О У 3 о g g ° к о щ У ф У Ф |
|
|
cd О >. si ЙЗ |
ь ф У |
ь ф У |
ь ф У |
у ф |
ф |
ф |
ь ф щ |
ф |
ь ф щ |
ь ф щ |
ь ф к |
ь ф У |
н ф У |
У н ф |
||||
|
3 S -я i ю |
СО Q |
о со О |
Q |
со О |
со Q |
к 1 § К S S ° m |
со CN Q |
к 1 § К S S ° m |
о СО со Q |
о СО СО Q |
со 04 Q |
со 04 Q |
ср Q |
о со со Q |
ср Q |
к 1 § К S У |
||
|
У О су ю н cd и a У < |
о |
о |
||||||||||||||||
|
cd У е |
К ft cti & у а |
К ft cti & у а 2 ' § |
g ° ф |
со, и о |
со, и |
со, и s 7 о - |
и о |
и |
у ^ н Q |
у ^ н Q |
и ф |
и ф |
и ф |
ю 04" и У ф |
1О 04" и У ф |
1О р" и У ф |
||
|
■ У н 2 « у « и ф а ф $ У о н а н cd 2 о g |
ь У |
о ф ь и |
о ф ь и |
о ф ь и |
о ф ь и |
о К ь < и К |
о ф и |
о ф и |
О ф и |
О ф и |
о ф и |
X У ь У |
X У н У |
о ф н и |
о ф н и |
о ф н и |
||
|
3 я со се |
о |
О) |
о |
со со" |
со со" |
CN |
о |
о |
о |
о |
о |
о |
||||||
|
У У Q к Cd 5 У И Я Ф ф S у 5 £ S s а |
04 о" о" |
со о" |
со о" |
со о" |
о" |
О о" |
о о" |
о" |
о" |
о" |
со о" |
со о" |
р. |
р. |
р. |
|||
|
о ® Н я У и S § |
о |
04 \ |
\ со |
со |
\ ю \ со |
04 \ |
со \ О) о |
о 04 |
о |
со |
со |
со |
о |
о 04 \ СО \ |
||||
|
У 2 2 2 У ® ж 9 ® 5 | a w |
о о со |
ю со со |
ю со со |
ю со со |
о о со |
о о со |
ю со со |
о о со |
О о со |
о о со |
ю со со |
ю со со |
о о со |
о о со |
ю со со |
о о со |
||
|
у с S |
со ю о со а |
ю X со со |
< а ю ю со со m |
ю й ю со со |
ю со о со |
X \ о о со |
ю X ю со со Q |
ю X о со Q |
о 04 \ О о со |
о со \ о о со |
ю со ю со со а |
ю со ю со со и |
ю со о со и |
ю о о ю со X |
ю со со со |
ю X о о со |

|
s к о IO ф IO со ф 2 S к S 2 S к а к РЭ СУ У со СУ РЭ м СО S с СУ Й тз СУ Е |
ст и S-. к < щ * s Й Я и Л Я s S Он К СТ \ и к g g а а у I о о < ^ ^ — И VI |
cd н < К 3 S и к и g я к й 5^ а к ^ о «- < ^ Н О 2 04 ^ О Я VI |
ст и S к * s Й Я и Л Я s S Он К СТ \ и g g а а й | о о < ^ ^ — И VI |
* s СТ 3 Л Я s S Он К \ и к g g а а й | о о < ^ Д VI |
к к о., н 5 Е-1 S U д В и к ^ Он и< о ^ 0 (^ \ у О щ ю_ ^н < § ff VI |
к к о., н 5 Е-1 S U д В и к ^ Он я< о ^ 0 СТ \ у О щ ю_ ^н < § СТ VI |
е UD Ф О СО ф а РЭ су СУ РЭ м су S С СУ а |
6 , г к К Он у Он к 6 к g о 4-1 a g S к £ и |
6 , г к К Он у Он к 6 к g о 4-1 a g S к £ и |
й СЧ со LQ с 3 СУ а СУ м су СУ СУ СУ со |
ж > к к Й » 5 ст h ° и и У СЯ СТ К g +1 о < g v 0 * а $ и й и у < |
|
04 ю ф 5 |
ф ф ф 5 |
04 СО 04 5 |
о ю Q |
04 СО 04 5 |
04 СО 04 5 |
ф § |
ф § |
ю О) о 04 Q |
|||
|
ф |
04 |
ф |
ф |
со о о" |
со о о" |
ю со" |
ю со" |
о о |
|||
|
о ф ь и |
о ф и |
о ф и |
о ф ь и |
о ф ь и |
о ф ь и |
о ф ь и |
о ф ь и |
о ф и |
|||
|
со ф- |
Cd |
Cd |
ф |
ГК |
[к |
со ф- |
со ф" |
со |
|||
|
со о" |
о" |
о о" |
ф о" |
о. |
О, |
со о" |
со о" |
04 о" о" |
|||
|
о 04 |
\ со |
о |
04 04 |
\ |
со |
\ 04 |
о \ |
ю \ о |
|||
|
со ф |
о о ф |
о о ф |
О о ф |
со ф |
о о ф |
со ф |
о о ф |
04 СО о |
|||
|
ю Ю 04 со ф о |
о |
ю ю о ф Q О |
ю 04 04 О О |
ю й со Е о |
ю со о ф Е о |
ю со ф |
ю о ю ф |
ю й 04 СО |

|
К S >S Й л к 8 18 у 8 и 5 щ +1 а § Н О и У ч^ Он |
2* 2 к а к РЭ РЭ м to S с Й Й о |
К К Д 6? 5 8 и § +1 а 5 X 7 U У ч^ |
и а к РЭ (0 у У РЭ м (О S ф ф 5 |
5? к К К Д 6? 5 8 и § +1 а 5 X 7 £ ф и У ч^ |
со о о со о СО ф 3 ф К а м со S |
В о со о ь |
S о ю о S ь и § |
к к ° >к § Й |
к 04 3 а м ty S к и (^ СЛ а Q |
S 8 , к ft и о К Я 0) щ ft И Я ft и $ ^ § 8 о § У й S S3 < я 32 g s К VI ® ю о § S 4 ° ft В д о m к ю и < |
S 8 , к ft и о К Л 0) д ft И Я ft И ^ У ° s о § 2 й S еЗ < я 32 g s К VI д ю о § s 4 х ° ft В К д о m к ю и < |
8 И S 5 к к к § * ^ и ft 0) о Я Он и И |
я 8 И S 5 к к к о * ^ Й ft 0) о Я Он и И |
||
|
ь ф щ |
ь ф щ |
ь ф щ |
ь и ф |
ф |
|||||||||||
|
к 1 § к S 8 ° m |
1 § д < к S 8 ° m |
О СО о 04 Q |
о со о 04 Q |
к 1 § д < к S 8 ° m |
о р 04 04 Q |
ю р 04 04 Q |
ю 04 04 Q |
к 1 § к S S ° m |
к 1 § к S S ° m |
К 1 § к S S ° m |
к 1 § д < к S S ° m |
||||
|
о |
о |
р со" |
|||||||||||||
|
К ft CQ X у а |
ю 04" и |
и ф |
ю 04" и |
ю р" и К ф |
|||||||||||
|
о н и |
о ф ь и |
о ф и |
о ф ь и |
о ф ь и |
о ф ь и |
о ф ь и |
о ф и |
о ф и |
о ф и |
о ф и |
о ф и |
||||
|
о |
о |
о |
а |
о |
о |
ГК |
о |
ю VI |
ю VI |
р VI |
р VI |
||||
|
о о" |
о о" |
04 о" о" |
04 о" |
р. |
о о" |
р. |
со о" |
р VI |
р VI |
р VI |
р VI |
||||
|
о \ о со \ о 04 о |
о со \ \ о |
о |
о |
о о 04 \ О 04 |
о со \ о |
о о \ о 04 |
о \ о 04 |
о о \ о |
\ о о о 04 О \ о о ^ о |
о со \ о \ 04 |
\ о X О о ^ о |
||||
|
04 со о |
04 со о |
04 СО о |
о со а |
О со а |
о со |
СО о со |
со со |
со |
со |
||||||
|
р X 04 со |
р X 04 СО ю Q О |
ю к и |
р р о со |
р X о со О) X |
ю й о со со Q |
ю й со о со m |
ю й со со X |
X \ |
X \ СО |
X \ со |
X со |

|
и CO CO IQ 3 a M fl < 0) 3 В < Ф V) & Q |
^ и 6 S rd Ф щ CT Й у о S о s S У К VI к ю о § S vi о ф g § к 00 & § s Н о m К ю и < |
ф . к ® Щ S и S д s < s и о _ и 3 VI 3 и ” g < v с 5 s щ ^^ S а ф у о m а и к g |
cd - „ о И щ g 5 cd К < § о о * И VI >s й 2 4 S в ф ^ и Н g а ф ф ° о М Он И д и |
|
о ^ |
S ё § о о S S 9 ^ со О СО И |
S ё § о О S S cd о со и |
|
|
о < X ф и |
О X ф и |
о X ф и |
|
|
ю VI |
ю, VI |
ю, VI |
|
|
ю VI |
сч VI |
сч VI |
|
|
О со o' о |
сч ^ ю со ^ о ^ ю, о“ |
сч о ° |
|
|
СО ю |
сч ю |
сч ю |
|
|
X со ю 5 |
X Х5 сч ю 5 |
X -Е сч ю 5 |

а

б
X
в
Фото 4. Лазерные строительные инструменты: а) – лазерный уровень УЛ-01; б) – построитель зенитно-надирной линии ПЗНЛ-01;
в) – лазерный модуль МЛ-04
d 8
13.04.2012 13:55:24
01 ( фото 4б ) служит для нивелирования при проведении строительных и отделочных работ. Он автоматически задает горизонтальную плоскость и строит вертикальную линию. С помощью ПЗНЛ-01 можно осуществлять угловую разбивку в угле 360° с ценой деления в 1°. Раздвижная штанга позволяет строить горизонтальные плоскости в диапазоне 0,05 – 3 м. Лазерный модуль МЛ-04 ( фото 4в ) строит линию визирования на доске, брусе, бревне длиной до 6 м, вдоль которой производится распиловка. Это позволяет использовать модуль для разметки и обеспечения точной прямолинейной распиловки досок и брусков на заданный размер по ширине на пилорамах, многопильных и ленточных станках.
Лазеры широко используются в тахеометрах и нивелирах в качестве дальномеров и определителей направления. Основные параметры лазерных тахеометров и нивелиров приведены в табл. 2, 3 соответственно, а их внешний вид – на фото 5, 6 . Лазерный тахеометр Leica TPS 1200 [17] ( фото 5 ) обладает высокоточной системой непрерывных угловых измерений с автоматической корректировкой и 2-осевым компенсатором угла наклона инструмента. Коаксиальный лазерный дальномер на основе полупроводникового лазера красного цвета свечения с несколькими режимами измерений позволяет выполнять измерения как с использованием отражателей, так и отражающих пленок. При использовании стандартной призмы точность измерения при дальности 3 км для всех моделей лазерных тахеометров фирмы Leica составляет 1 мм

Фото 5. Высокопроизводительный электронный тахеометр Leica TPS 1200
+ 1,5 ррм при разрешении 0,1 мм. Использование при этом лазерного дальномера с технологией PinPoint является идеальным для измерений углов зданий и других недоступных объектов, где невозможно установить отражатель.
Соосный с тахеометром лазерный дальномер красного цвета свечения имеет очень малый размер пятна подсвета. В связи с этим отпадает необходимость в использовании отражателя, и возможно измерение очень больших расстояний. В случае использования отражателя тахеометр сам выполнит точное наведение на центр призмы и отследит перемещения отражателя. Тахеометр позволяет найти отражатель в течение нескольких секунд. При выполнении этой функции тахеометр начинает вращаться и посылать вертикальный веерообразный лазерный луч. Как только отражатель будет обнаружен, вращение тахеометра прекратится и осуществится точное автоматическое наведение на отражатель. Для правильного ориентирования тахеометра используется спутниковая антенна, интегрированная в тахеометр. Благодаря этому отпала необходимость в контрольных точках, прокладке ходов и обратных засечек. Возможно дистанционное управление тахеометром с помощью радиомодема. Нивелир Laser 2D CONDTROL (фото 6а) [18] – самовыравнивающийся лазерный нивелир с магнитным компенсатором и лимбом, обеспечивающий построение одной вертикальной и одной горизонтальной плоскости. Нивелир не имеет подвижных компонентов, существенно компактнее и снабжен специальной призмой. При проецировании на препятствие образуется видимый крест от пересечения горизонтальной и вертикальной линий. Нивелир Laser 3D CONDTROL имеет 3 неподвижных лазерных луча, развернутых в плоскость специальной призмой. При проецировании на препятствие образуются 3 видимых креста от пересечения горизонтальной и двух вертикальных линий. GeniLaser10/20 (фото 6б) обеспечивает наиболее широкую развертку лазерной плоскости и мощность излучения лазера. Это делает нивелир удобным для работы в небольших помещениях и без использования штатива. GeniLaser 30/40/50 – это семейство многофункциональ-

г
Фото 6. Лазерные нивелиры: а) – Laser2D CONDTROL; б) – GeniLaser 10/20; в) – RotoLaser CONDTROL; г) – Nedo Benjamin


Таблица 2. Основные параметры лазерных тахеометров (по данным проспектов фирм)
|
Масса, кг/ габариты, мм |
co > co ^ CO ^ 7 co |
ио со О- О ^ £ V х 04 04 04 |
со” |
ио ио” |
ио со” |
04 со Е5 co" m |
со ио” со |
|
|
Диапазон рабочих температур, °С |
о 8 7 + |
о 8 7 + |
о 8 7 + |
о 8 7 + |
о ° 7 + |
о 8 7 + |
||
|
Лазер полупроводниковый, λ, нм/ класс |
о co |
04 \ О СО со |
04 \ О СО |
о со со |
04 \ О СО со |
>К m |
>к Он |
|
|
Напряжение питания, В |
04 |
со II |
04 II |
II |
04 |
7 |
||
|
Мин. дальность фокусировки, м |
co_ |
ио о” |
U0 о” |
ио. |
ио_ |
|||
|
Апертура, мм/ Угол поля зрения |
о co g |
04, \ |
о со \ о |
о со \ о |
О со со |
о g |
о |
|
|
Увеличение, крат |
co 04 |
о со |
О К со К ^ У S и 04 о |
о со |
о со |
о со |
||
|
". s H R u s о я S CD 4 a * S R S S н CD U r 2 а к S ° S |
В режиме DR |
CO U0 о CO ^H 04 |
со 1 7 о о СО 04 |
со 1 71 § 8 СО |
со 1 +1 ° о |
со 1 +1 8 ° |
ио 1 71 04 |
о ио |
|
По пленке |
CO 1 +1 8 о 04 co |
СО 1 +1 § 8 СО |
со 1 +1 § 8 СО |
СО 1 7 8 8 |
со 1 +1 8 § 04 со |
04 71 \ о со ио_ |
04 71 \ о ио 04 1 ио_ |
|
|
По призме |
co +1 о uo |
со 1 7 о 71 о \ о о со о ио |
со । 7 о 71 о \ о о со о ио |
71 \ о о о о о со |
04 71 \ о ио о о о со |
04 71 \ о g о 04 |
ио 71 \ о о о о |
|
|
2 и S < 3 ^ и к a |
Наименьший угловой отсчет |
^ |
о” |
^ |
■^ |
■^ |
||
|
Стандартное отклонение по DIN 18732 |
uo к со |
ио ио. |
04 |
04 |
04 |
|||
|
s |
со ф 3 н |
7 н ф 3 -S о '^ со Н со |
ф 3 .§ 3 н 8 |
0) б О Й ю Н сл |
ю 5 ^ н Е 5 'Й о Н Цн |
X Z 04 04 СО ^ |
+ о о СО 3 ф Он и н |
|
|
to U » |
ф н < 3 и |
ф н < 3 и |
ф н < 3 и |
ф 1 н < 3 и |
ф н < 3 и |
е Щ 1 g 1 d й £ и |
СО и 'ф m J Е К ™ s « СЙ ^ и о m ф 7 и |
|

Фото 7. Лазерный уровень Rugby 100
ных, полностью автоматических муль-типризменных лазерных нивелиров, обеспечивающих построение 2-/3-/4-х вертикальных и одной горизонтальной плоскости. Развертка обеспечивает пересечение вертикальных плоскостей в точке зенита. Нивелир обеспечивает 3D-разметку помещения с привязкой к точке стояния. Ротационный лазерный нивелир Nedo Primus-S комплектуется пультом-приемником и оснащен автоматическим компенсатором с сервоприводом, имеет систему компенсации микронаклонов, вызванных вибрацией, и возможность отключения компенсатора для задания наклонной плоскости. В нивелире имеется лазерный отвес.
Ротационный лазерный нивелир Rugby 55 обеспечивает автоматическое построение горизонтальной или вертикальной плоскости. В нивелире исключена ошибка определения высоты инструмента при неправильной повторной установке горизонта и из-за случайного смещения инструмента. Лазерные уровни Rugby 100 ( фото 7 ), Rugby 100LR, Rugby 200 содержат автоматический самонастраивающийся лазер для строительства и автоматического управления машинами [17]. Диапазон работы – до 300, 750 и 300 м соответственно, точность ± 2,6 мм на 30 м, ± 1,5 мм на 30 м, ± 1,5 мм на 30 м/± 2,6 мм на 30 м, масса 2,5 кг, рабочий диапазон температур –20…+50 °С.
Для решения задач построения пространственных 3-мерных моделей объектов и окружающего их простран-

|
й се и и се S |
о" |
СО о" |
о" |
04 о" |
СО о" |
04_ |
со_ |
СО |
04 СО о" |
со |
О со |
|
л и с Л У S о * < й о а < с а С |
со |
04 |
04 |
О |
о о |
со |
о со |
о со |
|||
|
S к и 5 S с |
m а со |
m а со |
m а со |
m а 04 |
m ю m |
а о н й |
а о н й |
m ю |
m ю m |
а о н й |
а о н й |
|
\ S И ч 66 аs п о £ н О К S < я ? и < < >? 5 а |
а со со 04 |
а со со о" со |
а со со о" 04 |
О СО со о" 04 |
ю со со о" ю \ \ со |
ю со со о" |
ю со со о" |
ю со со о" |
ю со со о" |
2 о" |
ю со со о" |
|
СУ я о О д н а н я с 2 у Я g ф & < S о а |
о |
о |
О +1 |
СО |
со +1 |
о +1 |
о +1 |
о +1 |
+1 |
о +1 |
о +1 |
|
и S я s я S о н |
о 04 |
о 04 |
О \ 04 +1 |
о 04 +1 |
о 04 +1 |
о \ со +1 |
о 04 +1 |
о 04 +1 |
о 04 +1 |
о о \ со +1 |
о о \ со +1 |
|
я 2 ® О R Н сп и Я й О „ я g S а с |
о |
о со |
О |
О 04 \ О |
о 04 |
о со |
О о |
О о |
О со 1 о |
о о со |
о о со |
|
с S |
о Q Н гн О й z 5 и |
о Q Н m q Й z 5 и |
о и О >н ТЗ Ф Ф й Z а |
ф й ^ О й ф о |
Ф о нй О 2 \ О со |
3 1 "° 'д’ Z m |
СХ) ° 9 "О В ф -г-Н Z а |
В о д а 5 Q о Z 5 о а и |
о Z < у Щ Г1 |
о а й ей |
ю а й ей |
|
СУ СУ СУ а и |
О s Q и Z о О a U |
о s Q и Z о О a U |
О s Q и Z о О a U |
о а s Q и Z о О a U |
о а s Q и Z о О a U |
О а s Q и Z о О a U |
О а s Q и Z о О a U |
о а s Q и Z о О a U |
2 0) - о К У К и & я о .У И 0) < а |
2 0) - о К У К и & я о .У И 0) < а |
2 0) - о К У К и & я о .У И 0) < а |
ства с высокой точностью, большой скоростью и надежностью измерений используются лазерные сканеры [19 – 28]. Технология пространственного сканирования позволяет создать цифровую 3-мерную модель объекта, представив его набором точек с пространственными координатами X, Y, Z. Лазерные сканеры измеряют координаты точек поверхности с очень большими скоростями (несколько тысяч измерений в секунду). Полученный набор сотен тысяч и миллионов точек называется «облаком точек» и впоследствии может быть представлен в виде 3-мерной модели объекта, плоского чертежа, набора сечений поверхности и пр. Процесс съемки полностью автоматизирован. Более полную картину невозможно представить никакими из других известных методов [19]. Основные параметры лазерных сканеров приведены в табл. 4 , а внешний вид – на фото 8 .
Лазерный сканер FARO LS ( фото 8а ) [42] применяется при съемке и построении планов предприятий для восстановления и уточнения проектной документации, мониторинге состояния инженерных сооружений, контроле геометрических параметров крупногабаритных объектов, для целей реставрации и сохранения памятников культуры, в криминалистике. Область сканирования 360° в горизонтальной и 320° вертикальной плоскости позволяет за минимальное время провести измерения и получить 3-мерную модель окружающего пространства. Встроенный датчик угла наклона позволяет компенсировать неточность установки сканера. Лазерный сканер FARO LS состоит из 4-х модулей: дальномерного блока, поворотного зеркала, встроенного компьютера и блока управления. Программное обеспечение позволяет в реальном масштабе времени контролировать процесс сканирования. После завершения сканирования все полученные фрагменты можно сшить, оценить точность и экспортировать во все известные системы автоматического проектирования (САПР).
Лазерный сканер ILRIS-3D компании Optech (Канада) [20] ( фото 8б ) предназначен для подробной высокоскоростной съемки объектов в целях последующего построения пространственных координатных моделей.

Таблица 4. Основные параметры переносных и носимых лазерных сканеров (по данным проспектов фирм)
|
Габариты, мм |
2 S X Ф и 04 и 5 ^ |
9 ^ 9 _ со 2 о у СО g m со и со ' |
1 |
04 Q |
9 04 Q |
9 04 Q |
||
|
Масса, кг |
L ^ _ S u ф a |
n i U 2 ^Kg |
_ X ™ о 5 о ^ |
ю О со о" |
o |
co |
||
|
Диапазон рабочих температур, °С |
. о О + |
■ 9 О + |
. о ° + |
о 9 7 + |
. о : ^3 o + |
■ 9 O + |
■ 9 О + |
|
|
Напряжение, В/ Энергопотребление, Вт |
\ |
। о ° о 2 о ф S ~ |
и |
\ ю X С° 1 СО со |
I CO 1 \ co CO I II 9 |
1 ° 2 c° I 04 |
||
|
Лазер полупроводниковый: λ, нм/ θ, мрад/РИЗЛ/ класс |
(^ co \ \ \ |
\ 04 04 Й со < |
2 О ~ О) СО о |
< / < 04 । \ |
\ \ 04 |
o’ |
Я S О О |
\ \ ° \ g co_ о |
|
Расстояние между точками, мм |
(0 ^ ^ <0 ^ ^ 1 2 S 1 8 ^ |
г о |
||||||
|
Режим сканирования, число точек гор./верт., время сканир., с |
о и о S J ^ Ю 7 S о ^ ^ 4 ft ^ СЧ |
|||||||
|
Разрешение, размер лазерного пятна, мм |
СО я 3 |
S о СО cti Щ |
/ n х Ng S 7 а о f 5 oft 2 R ■& о к О) к о |
|||||
|
Угол поля зрения, гор./верт.,град. |
о со \ о со со |
О \ со |
о со |
О со о со |
о co о co co |
о со о со со |
о 2 О ft , TH co | _|_ |
|
|
FC, скан/с |
о и । о-7 з ^ — 1 Он |
о 04 |
о 04 |
|||||
|
VC, точек/с |
о ю |
о ю |
о о ю 04" |
и S 00 S < |
1 2 |
l 2 |
1 2 00 2L |
1 о о о |
|
Dp, мм |
о |
co |
о |
о |
||||
|
D/ΔD, м/мм |
О о о со о |
1 £ 1 ^ ° m о § О1 щ СИ |
1 < о о 04 ^ О 04 6" О |
о о" |
9 § । |
о о О 1 % 2 ю |
о § § со |
|
|
ΔОПВМ, мм |
^ ь <0 of § ^ |
V |
||||||
|
ΔМП, мм |
^ Щ СО А Щ О С4 04 хГ СО |
04 +1 |
||||||
|
Модель |
о о о со о X |
X и 0) S н |
о о о со 04 Н н |
о 04 Q |
о 04 N |
о о co N |
о 04 N |
04 СО 5 Он |
|
Страна, фирма |
<0 и ft и о m ф |
ф н < 3 и |
Ы "55 fl ft s ft S G С S о 2 3 2 ft 2 б О S S и и |
ф к S |
<5 5 S x — >^ U X сл |
x — >^ U X сл |
x S § x - >■ U X сл |
x S § X - ift U X сл |
|
8 3 2 & S — 8 | |
со |
S |
S |
||
|
S — з & ^ & ^ к У О и о § eq ^_ |
со |
ю |
со о о" |
о" |
|
|
<5 8 7 + |
о 8 7 + |
: О 2 7 |
|||
|
о со |
1 < ю о СО ^ 1 СЧ |
||||
|
< \ LO ^ to CN |
< < £2 \ |
||||
|
о о" |
|||||
|
д О К 0 ^ ^ о х ф со г^ д со ХГ о н |
S со о" |
||||
|
о со о со со |
0 6^ £ 8 0 +1 1 + |
о о |
о со со о СО со |
||
|
о ю |
о |
о о о со |
о со |
о О х < со |
о со |
|
о" |
со о о" |
||||
|
% |
о с° 7 о ° |
§ § СО |
со \ со |
1 н ю от со 8-со ^ о |
ю о 71 \ |
|
СО |
|||||
|
01 и + ° N 8 |
ф ф о и Й 2 Ун Н |
Q со S |
о со со О о со Ун X |
° < и Ун со |
N ^ 01 О N 2 |
|
. ti ф ® < “ ф Н Ф £ и^ |
Д д к д § Й £1 |
д к д К ф § Й £1 |
д к д К ф § Й £ 1 |
д к д К ф § Й £ 1 |
8 5 Я к и 6 СТ н |


а

б

в
Фото 8. Лазерные сканеры: а) – FARO LS; б) – ILRIS-3D; в) – FARO Laser ScanArm


Фото 9. Лазерные сканеры: а) – TRIMBLE GX; б) – Leica Scan Station; в) – Leica HDS6000; г) – Model Maker D
Принцип действия сканера аналогичен принципу работы безотражательного электронного лазерного тахеометра, но значительно превосходит его по эффективности и основан на измерении большого количества точек, расположенных на снимаемом объекте. Измерения происходят со скоростью 2500 точек/с. Углы в данном случае не измеряются, а задаются поворотом зеркала, одновременно регистрируясь запоминающим устройством. Результат съемки – данные, содержащие 3 координаты X, Y, Z и значение интенсивности сигнала для огромного количества точек. Встроенная в сканер цифровая фотокамера позволяет получить фотоизображение области сканирования, а также истинный цвет каждой точки на скане. С помощью специализированного программного обеспечения полученные после съемки «облака точек» «сшиваются» друг с другом. Объединенное «облако точек» может быть трансформировано в любую систему координат.
Компания FARO Technologies Inc. (США) предложила мобильную коор- динатно-измерительную машину FARO Laser ScanArm [20] (фото 8в), сочетающую в себе возможности контактного и бесконтактного метода сканирования и САD-модели, сканирования и 3D-моде-лирования. Это стало возможным благодаря интеграции указанной машины и нового лазерного сканера FARO Laser Line Probe. В отличие от других сканеров, в FARO Laser ScanArm контактный щуп и сканирующая головка могут работать поочередно, без необходимости демонтажа компонентов системы. Сканер характеризуют высокая скорость сканирования (более 19 000 точек/с), автоматическая подстройка сканера под отражательную способность материала, полная совместимость всех компонентов системы.
Лазерный 3D-сканер TRIMBLE GX [21] (фото 9а) является геодезическим инструментом для быстрого измерения координат и получения цифровых изображений объектов. Прибор обеспечивает формирование видеоизображения в реальном масштабе времени, автоматическую съемку панорамного изображения, автома- тическое отображение процесса сканирования, интерактивное задание сектора сканирования на видеоизображении, фотографии или панорамном снимке, задание многоугольных секторов и секторов для нескольких сканов, автоматическое распознавание плоских и сферических мишеней, 3D-визуализацию, панорамирование и масштабирование в реальном масштабе времени непосредственно в процессе сканирования, визуализацию положения сканера, показ «облаков точек» в реальном цвете или по степени интенсивности отраженного лазерного луча, моделирование визуализации поверхностей и освещения окружающей среды, измерения и быстрое вычисление.
Новый класс лазерных сканеров Leica ScanStation фирмы Leica Geosystems [22] ( фото 9б ) обеспечивает в процессе геодезической съемки полное поле зрения, высокую точность единичных измерений, большое рабочее расстояние. Двухосевой компенсатор позволяет выполнять точные геодезические измерения, необходимые для


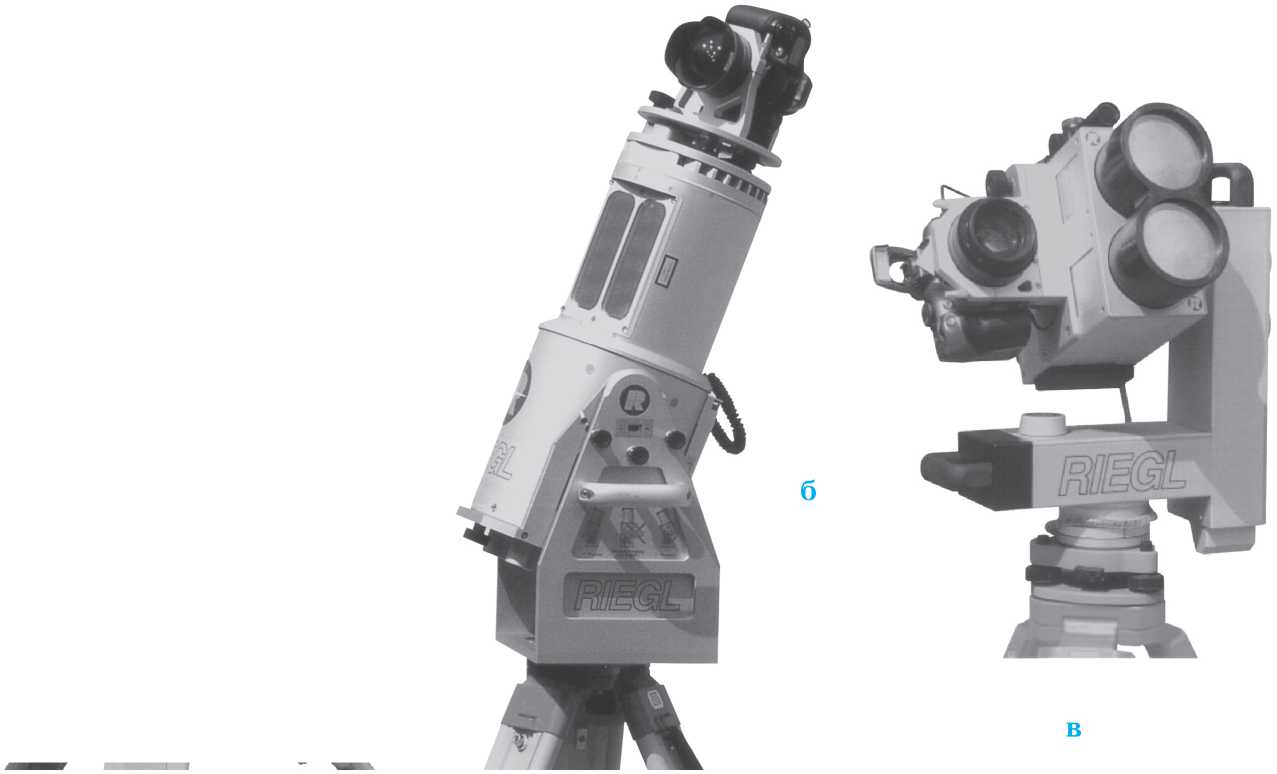
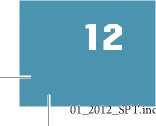
Фото 10. Лазерные сканеры: а) – RIEGL LМS-Z210ii; б) – RIEGL LMS-Z390i; в) – RIEGL LРM-321

привязки сканера, и точное проложение съемочного хода. Сканер обеспечивает совместимость со стандартом X-function, возможность управления с помощью написания сценариев, содержит встроенную камеру высокого разрешения для получения пространственной фотографии, состоящей из множества связанных маленьких кадров для быстрого выбора объекта съемки, автоматического наложения истинных цветов на «облако точек». Сканер позволяет делать съемки на расстоянии до 300 м при коэффициенте отражения поверхности 90% и 134 м при 18%. Этого достаточно для решения большинства задач при безотражательных измерениях (без использования призменных отражателей). Каждое отдельное измерение осуществляется с первого раза с максимальной точностью.
Модель Leica HDS6000 фирмы Leica Geosystems является представителем нового поколения высокоскоростных лазерных сканеров [23] (фото 9в). Сканер обладает высокой точностью измерений при ограниченном времени. Для точного уравнивания (регистрации) нескольких сканеров в единую геометрическую сеть используется Leica Cyclone REGISTER, который позволяет обрабатывать измерения как по визирным маркам, так и по идентичным точкам (метод «облако с облаком») без использования визирных марок.
Мобильная сканирующая измерительная система Model Maker D фирмы ООО «Нева Технолоджи» [24] ( фото 9г) в реальном масштабе времени создает оптимальную сетку, сохраняя особенности трехмерной геометрии. Прибор следит за изменениями параметров сканируемой поверхности (формы, цвета, отражающей способности) между полосами сканирования и изменяет настройку сенсора в реальном масштабе времени. При этом мощность лазера меняется не только между последовательными полосами, но даже в пределах одной полосы. Имеется встроенная память для хранения данных о калибровке.
Очень высоким качеством обладают лазерные сканеры Riegl LMS фир-
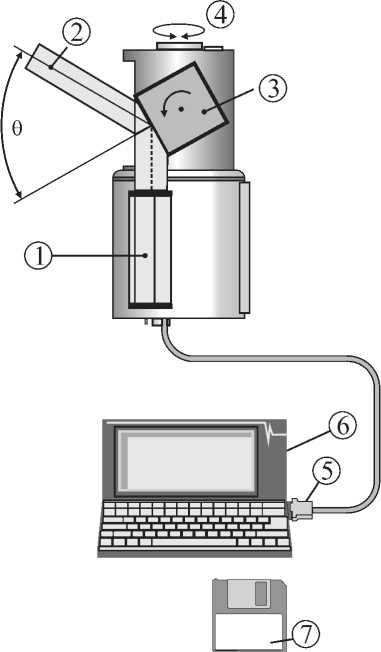
Рис. 2. Принцип действия лазерного сканера класса RIEGL

мы RIEGL Laser Measurement Systems (Австрия) [25] (фото 10 ). Принцип действия сканера поясняется рис. 2 [25]. Дальномерная система 1 3-мерного сканера LMS-ZXXX основана на лазерном дальномере REGL LD90-3, отвечающем требованиям высокоскоростного сканирования (высокая частота импульсов, быстрая обработка сигнала, быстрый интерфейс обмена данными). Быстрое линейное сканирование (угловое смещение) луча лазера 2 выполняется при помощи вращающегося многогранного зеркала 3 с определенным количеством отражающих поверхностей. Оно непрерывно вращается с регулируемой скоростью. Этим обеспечивается однонаправленное сканирование в угле 80°. Медленное сканирование (структурное сканирование) обеспечивается вращением оптической головки 4 в пределах угла 360°. Получаемая информация (расстояние, угол, амплитуда сигнала и цвет объекта) поступает по интерфейсу 5 TCP/IP на вход персонального компьютера 6 или эквивалентного ему устройства, на котором установлено программное обеспечение RiSCAN PRO 7 . Оно позволяет оператору выполнять большое количество задач, включая настройку прибора, получение данных, их индикацию, управление ими и их архивацию.
Лазерный сканер RIEGL LМS-Z210ii [25] (фото 10а) обеспечивает дальность до 650 м при классе лазера 1, обеспечивает высокую точность измерений (до 15 мм) и возможность передачи полноцветного изображения. Лазерный сканер RIEGL LMS-Z390i (фото 10б) обеспечивает автоматическое создание текстурированных сеток с высоким разрешением, фотореалистическое 3-мерное пространство, автоматическое создание ортофотоснимков, высокую точность (до 2 м) на дальности до 400 м при классе лазера 1. Лазерный сканер RIEGL LРM-321 (фото 10в) представляет собой лазерную профилирующую систему дальнего действия, допускающую без-отражательный режим работы в диапазоне до 6000 м с высокой точностью (до 25 мм) даже при неблагоприятных условиях окружающей среды. Точку «соударения» лазерного луча с поверхностью можно наблюдать при помощи встроенной в профилограф зри- тельной трубы. Возможна регистрация нескольких отраженных сигналов – до 3 отражений на одно измерение. Встроенный маршрутизатор беспроводной локальной сети позволяет подключить систему RIEGL, оснащенную цифровой камерой, к удаленному персональному или карманному компьютеру. Можно подключить цифровые камеры с USB-интерфейсом, например, NICON D 100. Дальность беспроводной связи – примерно 50 м со стандартными антеннами. Улучшенная дальность до 1000 м может быть достигнута с использованием внешних направленных антенн. Обеспечивается автоматическое переключение 10/100 М интерфейса Ethernet/бы-стрый Ethernet.
Автоматизированная система фиксации следов ДТП ЗАО «Стинс Коман» [26] обеспечивает замеры с высокой достоверностью в любое время суток и в любую погоду. Возможное удаление от объекта – до 150 м, время сканирования с одной точки – до 2 мин. Весь процесс фиксации ДТП может занимать порядка 10 – 20 мин. Применение специального программного обеспечения исключает возможность возникновения ошибок и позволяет моментально определить расстояние между объектами, вывести результат на печать, сохранять и многократно использовать данные. Для работы предусмотрено 2 окна: в верхнее загружается «облако точек», полученное с лазерного сканера и трансформируемое в вид сверху, а в нижнем окне оператор рисует схему в полуавтоматическом режиме. Для быстроты и простоты он выбирает нужные элементы из готовых библиотек пиктограмм, которые будут открыты как для редактирования, так и для пополнения самим пользователем. Все пиктограммы размещаются на схеме в едином масштабе. Абсолютная погрешность измерения на 70 м – 5 мм, масса (без ноутбука и принтера) – 15 кг, время непрерывной работы – 4 ч, скорость сбора точек – 12×10 4 точек/с.
Высокоскоростной лазерный сканер scanCONTROL 2800. MICRO-EPSILON MESSTECHNIK GmbH and Co/ KG, Германия [27] в отличие от обычных сканеров использует инновационную CMOS-матрицу с общим электронным затвором, на которую передается диф- фузно отраженный от объекта свет. Затвор матрицы делает измерительную систему практически независимой от скорости и ускорения объекта измерения. В противоположность точечным лазерным сканерам на поверхность объекта проецируется лазерная линия. Вместе с информацией о расстоянии (ось Z) регистрируется также точное положение каждой точки лазерной линии (ось Х). Контроллер производит обработку результатов измерения и выдает значения в 2-координатной системе, привязанной к датчику. При измерении размеров подвижных объектов возможно получение 3D-изобра-жения.
Лазерные сканеры для бесконтактного съема информации Kreon ZEPHYR фирмы Kreon Technologies (Франция) [28] обеспечивают точность до ± 0,015 мм. Комплексное использование данного сканера с другим сканером, например, FARO [20], позволяет резко сократить время снятия данных. Программное обеспечение позволяет производить весь комплекс работ по сканированию объектов и подготовке результатов для передачи в различные CAD-системы для обратного инжиниринга, инспекции, прототипирования и т.д.
Таким образом, существующие портативные и переносные лазерные системы позволяют решить широкий круг задач для спецтехники, практически не выполнимые с помощью устройств другого типа ■
Список литературы Носимые и переносные лазерные приборы для спецтехники
- Гейхман И.Л., Волков В.Г. Основы улучшения видимости в сложных условиях. -М.: ООО «Недра-Бизнесцентр», 1999. -286 с.
- Гейхман И.Л., Волков В.Г. Видение и безопасность. -М.: Новости, 2009. -840 с.
- Aebi V., Vallianos P. Laser-illuminated viewing provides long-range detail./Laser Focus World, 2000. -No. 9. -PP. 147 -150.
- Unprecedented medium and long-range night surveillance capacities. Проспект фирмы OBZERV Technologies Inc. -Канада, 2009.
- Active portable night vision system. Проспект фирмы OBZERV Technologies Inc. -Канада, 2009.
- Двухканальный прибор обнаружения «Зарница». Проспект филиала ИФП СО РАН «КТИ ПМ». -Новосибирск, 2010.
- Прибор обнаружения оптико-электронных средств. Проспект фирмы ФГУП «НПО АСРОФИЗИКА». -М., 2010.
- Spotline Mk-2. Проспект фирмы RAFAEL. -Израиль, 2010.
- Spotlight Spots Snipers./Armada International, 2008. -No. 5. -P. 18.
- Прибор «Призрак-М» (ТЛС2000). Проспект фирмы «ТАЛОС». -М., 2005.
- Лазерные модули. Проспект фирмы «ФТИ-ОПТРОНИК». -С-Пб., 2010.
- Инфракрасный термометр LaserSight® c пересекающимися лазерными лучами -альтернатива дорогостоящим тепловизорам. Проспект фирмы ЗАО «ТЕККНО». -С-Пб., 2009.
- Пирометр MiniSightPlus. Проспект фирмы ООО «Сенсорика-М». -Самара, 2009.
- F 18-1. Датчик приближения. Светоотражающий барьер со сквозным лучом. Проспект фирмы ООО «Сенсорика-М». -Самара, 2009.
- FS/FE 12 RL. Теневой лазерный датчик. Проспект фирмы ООО «Сенсорика-М. -Самара, 2009.
- Лазерные строительные, деревообрабатывающие и геодезические приборы. Сборник проспектов «СКАТ-Р» (НИИ «Полюс»). -М., 2007.
- Необходимые инструменты для любой строительной площадки. Каталог Leica Geosystems. -Австрия, 2007.
- Лазерные инструменты. Каталог фирмы CONDTROL. -М., 2005.
- Технология лазерного сканирования в съемке промышленных объектов. Проспект НПП «Навгеоком». -М., 2007.
- Лазерные сканеры. Сборник проспектов фирмы НПК Йена Инструмент. -М., 2010.
- Лазерный 3D сканер TRIMBLE GX. Проспект НПП «Навгеоком». -М., 2007.
- Новый класс лазерных сканеров Leica ScanStation. Проспект фирмы Leica Geosystems. -Австрия, 2007.
- Leica HDS6000. Новое поколение высокоскоростных лазерных сканеров. Проспект фирмы Leica Geosystems. -Австрия, 2007.
- Мобильная сканирующая измерительная система Model Maker D. Проспект фирмы ООО «Нева Технолоджи». -С-Пб., 2007.
- Трехмерные лазерные сканирующие системы. Каталог фирмы «ГЕОПОЛИГОН». -М., 2009.
- Автоматизированная система фиксации следов ДТП. Проспект ЗАО «Стинс Коман». -М., 2007.
- Высокоскоростной лазерный сканер scanCONTROL 2800. MICRO-EPSILON MESSTECHNIK GmbH and Co/KG. -Германия, 2007.
- Лазерные сканеры для бесконтактного съема информации Kreon ZEPHYR Проспект фирмы Kreon Technologies. -Франция, 2009.
