Новые направления в разработке автоматизированных систем контроля безопасности гидротехнических сооружений

Автор: Шайдуров Георгий Яковлевич, Волошин Александрмихайлович, Ветошкин Владимирниколаевич, Гондарев Викторвикторович, Суслопаров Михаилниколаевич, Shaidurov G. Ya., Vetoshkin V.N., Gondarev V.V., Susloparov M.N.
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Математика, механика, информатика
Статья в выпуске: 6 (32), 2010 года.
Бесплатный доступ
Рассмотрены концептуальные подходы к созданию импортозамещающих технологий мониторинга крупных гидротехнических сооружений - радиотехнического створа, автоматических датчиков гидронивелиров и деформометров для контроля береговых примыканий сооружений плотины.
Мониторинг, гидротехнические сооружения, радиотехнический створ, гидронивелир, уровнемер, деформометрический контроль, примыкание
Короткий адрес: https://sciup.org/148176410
IDR: 148176410 | УДК: 621.311.21
New directions in research of hydraulic structures safety control
In the article we examine conceptual approach of competitive technologies making for big hydro engineering, structures monitoring - radio power site, automatic hydroxonium and level gauge sensors for dam structures coastal contiguity control.
Текст научной статьи Новые направления в разработке автоматизированных систем контроля безопасности гидротехнических сооружений
В районах Восточной Сибири, в частности, на территории Красноярского края, расположен ряд потенциально опасных наземных и подземных промышленных инженерных сооружений, представляющих непосредственную угрозу жизнедеятельности населения. Наибо- лее опасными и требующими всестороннего мониторинга и пристального внимания объектами, являются крупнейшие гидротехнические сооружения: Красноярская ГЭС, Саяно-Шушенская ГЭС и строящаяся Богучанская ГЭС.
Безусловно, в проектах плотин I–III классов предусматривается закладка всевозможной контрольно-измерительной аппаратуры (КИА) для проведения натурных наблюдений за работой и состоянием сооружений, их оснований и приконтактных зон береговых примыканий, какв процессе строительства, таки в период эксплуатации. Материалы этих наблюдений используются для оценки надежности объекта, своевременного выявления формирующихся дефектов, назначения ремонтных мероприятий, предотвращения аварий и улучшения условий эксплуатации. Натурные наблюдения подразделяются на контрольные и специальные.
Основными задачами натурных наблюдений за гидротехническими сооружениями являются комплексное изучение их основных показателей работы; проверка соответствия этих показателей проектным предпосылкам, критериям безопасности и нормативным требованиям регламентирующих документов. Временной период эксплуатации плотины рассчитывается достаточно длительным, и за период ее работы происходят значительные изменения как в принципах и методах измерений некоторых параметров, так и принципиальные изменения конструкций контрольно-измерительных аппаратных средств и систем [1].
Опыт эксплуатации гидротехнических сооружений показывает чрезвычайную сложностьпроцессов взаимодействия тела плотины с основанием и скальными примыканиями. Многофакторность, многоэтапность, разно-масштабность и изменчивость этих процессов делает механизм каждого взаимодействия и методы их контроля уникальными, требующими индивидуального подхода.
Проект КФ-63, выполненный в 2010 г. по гранту Красноярского краевого фонда поддержки научной и научнотехнической деятельности, включает в себя три составные части:
-
– разработку научно-технических основ нового метода дистанционного контроля деформации геометрической формы плотины – радиотехнического створа;
– разработку цифрового датчика высокоточного контроля уровня воды в гидронивелирах и технологической основы создания соответствующей автоматизированной системы;
– создание основ деформометрического метода и датчиков контроля напряженного состояния зон примыкания краевых бетонных секций плотин к массиву скального участка горных пород.
Разрабатывается принципиально новый, не используемый ранее дистанционный метод контроля геометрической формы и собственных колебаний плотины, основанный на радиотехническом способе измерения расстояния с точностью ±100 мкм с дистанции порядка 1 000 м.
Сущностьметода заключается в установке по верхней кромке плотины активных или пассивных радиоизлучателей, компенсации влияния атмосферы за счет использования базовых переизлучателей и достижении высокой точности путем исключения паразитных переотра-жений от стенки плотины параметрической модуляцией волнового сопротивления радиоизлучателей.
На этапе теоретического обоснования метода анализируются два его варианта: метод активной радиолока- ции с облучением пассивных переизлучателей и синхронизацией по времени и метод с использованием активных излучателей, расположенных по верхней кромке плотины, приемом радиосигнала в базовой точке в районе нижнего бьефа и синхронизацией по времени через космические РНС ГЛОНАСС-GPS. Будет осуществлена экспериментальная разработка оптимального из указанных двух вариантов методов.
Поскольку на всех ГЭС Российской Федерации используются неавтоматизированные гидронивелиры, обеспечивающие контрольпоперечных смещений плотины и представляющие собой трубопроводы, заполненные водой, актуальным является автоматическое измерение уровня воды в них с точностью ±20 мкм.
Автоматизированные датчики зарубежного производства, в частности немецкой фирмы «Флайбергер преци-зионс механик», имеют чрезвычайно высокую цену–до 8 000 долл. – и проблематичны в эксплуатации на отечественных ГЭС. Проект КФ-63 предполагает разработку концептуально нового датчика на основе оптоэлектронных технологий с использованием лазерного облучателя и преобразования координат с помощью матрицы ПЗС. Предварительные эксперименты подтвердили возмож-ностьреализации подобного метода.
Эффективными являются деформометрические методы исследования и контроля напряженного состояния зон примыкания краевых бетонных секций с напряженными участками скальных массивов горных пород. Долговременные наблюдения в процессе эксплуатации за техноприродными процессами в зонах взаимодействия плотин и береговых скальных упоров осуществляются с помощью визуальных и инструментальных методов. К инструментальным методам относятся геодезические, геофильтрационные (геогидравлические), геотехнические, геотермические, геофизические. Визуальные наблюдения за развитием техноприродных процессов проводятся в местах их прогнозирования и проявления в элементах сооружения. Таким образом, ведутся визуальные наблюдения за техноприродными процессами, идущими в береговых примыканиях плотин.
Наиболее серьезную опасность в настоящее время для Красноярского региона представляет сползание гребня плотины Саяно-Шушенской ГЭС вниз по течению реки. Гравитационно-арочная плотина Саяно-Шушенской ГЭС противостоит нагрузке в основном за счет упора в берега. В связи с возникшей проблемой контрользоны примыкания плотина – скальный берег является крайне актуальным. Применение визуальных и инструментальных методов требует полной автоматизации мониторинга сдвижения и деформациями приконтактных зон и береговых примыканий, что позволить выявить тенденции поведения гидросооружения. Применение деформомет-рических методов совместно с аппаратурой радиотехнического створа обеспечит выявление взаимосвязи между поведением гидросооружения и состоянием береговых примыканий.
Аппаратная реализации радиотехнического створа. Структурная схема проектируемого створа представлена системой маломощных радиопередатчиков, располагаемых равномерно вдоль верхней кромки плотины на расстоянии между собой 20…30 ми синхронизируемых опорными сигналами, поступающими с приемного устройства, располагающегося в районе нижнего бьефа на расстоянии, рекомендуемом используемыми в настоящее время методиками геодезических измерений створа: r1 =1 000иr2 = 3 000 (рис. 1).
Для компенсации изменений параметров атмосферы в двух опорных точках по обоим берегам устанавливаются передатчики опорных радиоканалов, служащие для оперативной оценки скорости распространения радиоволн и внесения поправок в результаты измерения дальности основных каналов.
Все передатчики створа работают в импульсном режиме и дистанционно включаются командами, поступающими от наземного приемника по каналу синхронизации.
Приемник по очереди принимает сигналы передатчика, которые после детектирования фазовым детектором преобразуются в цифровой код и запоминаются в оперативной памяти микроконтроллера (МК).
Одновременно в памятьМК поступают данные измерений скорости распространения радиоволн (РРВ), получаемые из опорных радиоканалов.
Расчет приращений дальности A r , получаемых по каждому измерительному радиоканалу, и ввод атмосферных поправок на скоростьРРВ производится в МК, в качестве которого может быть использован персональный компьютер.
Антеннаприемникаснабжаетсяэлектроприводомдляосу-ществленияугловогосканированияпередатчиковствора.
При использовании простых антенн типа «волновой канал» небольших габаритов возможно использование для каждого передатчика створа персональной антенны. В этом случае можно исключитьмеханическое перемещение приемной антенны.
Временная эпюра включения передатчиков створа показана на рис. 2. В этом варианте в течение цикла обзора сначала излучает опорная береговая станция, затем с периодом повторения Т = 60 мкс включаются попарно передатчики 1, 2 створа в течение времени Т 2 , равного, например, 1 с. В следующий цикл работают передатчики 2, 3, затем 3, 4 и далее с текущими номерами i , i +1.
Опорный передатчик привязывается по времени и частоте к величинам систем ГЛОНАСС/GPS, так что на приемной стороне с помощью местного генератора, управляемого напряжением (ГУН), формируется сигнал опорной частоты f 0 .
Далее, при подключении очередной пары фазовых детекторов ( i , i + 1), на интеграторах, подключенных к их выходу, вырабатываются напряжения, пропорциональные сдвигу фаз радиосигналов, поступающих от соседней пары створных передатчиков ( ф , , ф 1 ).
Первая разностьэтих фазовых сдвигов дает приращение расстояния между антеннами створных передатчиков:
z , . A r
( Аф, -Аф i + 1 ) = 2 я f— . (1)
c
Возможно либо прямое преобразование этой разности в цифровой код, либо с промежуточным преоб-
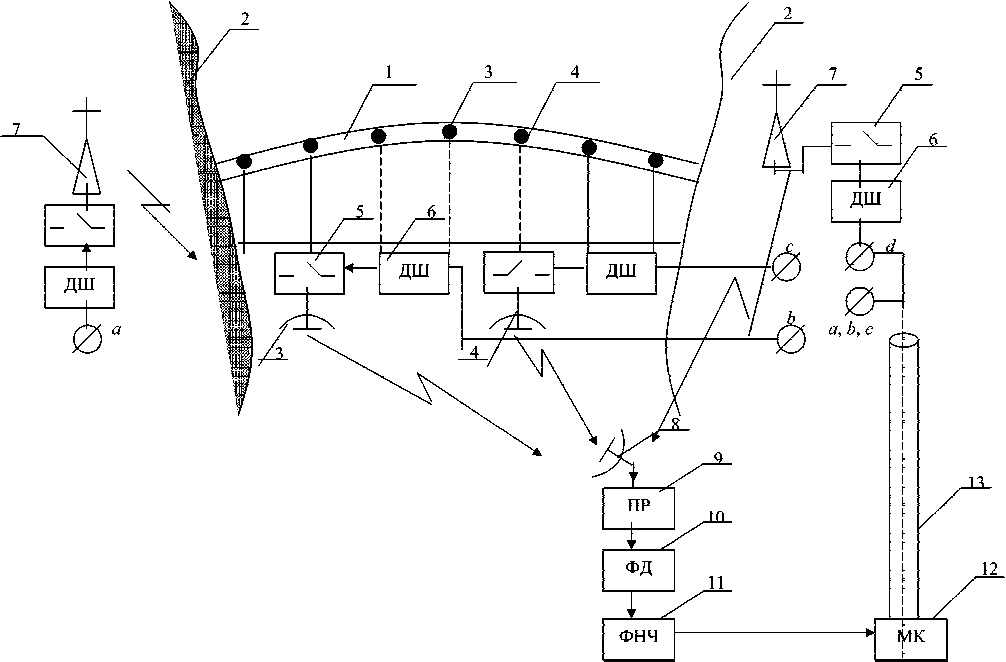
Рис. 1. Структурная схема реализации радиотехнического створа: 1 – верхний створ арочной плотины;
2 – береговая черта; 3, 4 – антенны створного передатчика; 5 – коммутатор; 6 – дешифратор команд;
7 – опорные передатчики; 8 – приемная антенна; 9 – приемник; 10 – фазовый детектор; 11 – фильтр нижних частот;
12 – микроЭВМ; 13 – оптоволоконная линия связи
разованием частотного сдвига с помощью дополнительных ГУНов.
Таким образом, за счет сближения до минимума измерительных трасс, высокой точности привязки по частоте и времени опорного передатчика под сигналы КРНС ГЛОНАСС/GPS, обеспечивается компенсация изменений скорости РРВ за счет метеоусловий среды. В этом случае набег времен запаздывания радиосигнала на всей длине радиотрассы r исключается из данных измерений, а погрешность, вносимая изменяемой скоростью РРВ, зависит лишь от приращения расстояний между точками i , i + 1, что на три порядка меньше величины r .
Автоматизация гидронивелиров. Определение осадки бетонных плотин и их оснований производится нивелированием разного вида в зависимости от допустимой погрешности измерений.
Размещение марок на плотине должно даватьинфор-мацию о распределении осадки в продольном и поперечном направлениях. Количество марок определяется классом сооружения, его геометрическими размерами и конструктивными особенностями.
Могут применяться следующие методы нивелирования: геометрический – для измерений на гравитационных и контрфорсных плотинах; тригонометрический – для определения осадки марок арочных плотин, а также при контроле состояния берегов (оползни, обвалы); гидростатический – для измерения осадки отдельных точек, доступ к которым затруднен.
Для определения наклонов плотины целесообразно использовать поперечные гидронивелиры.
Основным достоинством гидронивелиров является возможностьосуществления полной автоматизации измерений сравнительно простыми и в то же время эффективными средствами.
В рамках проекта КФ-63 ведется разработка и изготовление лабораторного макета концептуально нового датчика на основе опто-электронных технологий с использованием лазерного облучателя и преобразования координат на основе матрицы ПЗС. Выполнена проверка метода измерений и проведены лабораторные испытания основанного на этом методе макета.
Принцип действия датчика основан на отражении лазерного луча от поверхности жидкости на линейное многоэлементное фотоприемное устройство (ФПУ) с последующей оценкой положения его на линейке ФПУ. Режимами работы ФПУ управляет микроконтроллер, используемый также для первичной обработки результатов измерений.
Световой поток, отраженный от поверхностного слоя жидкости в резервуаре датчика, попадает через защитное стекло на фотоприемное устройство (рис. 3).
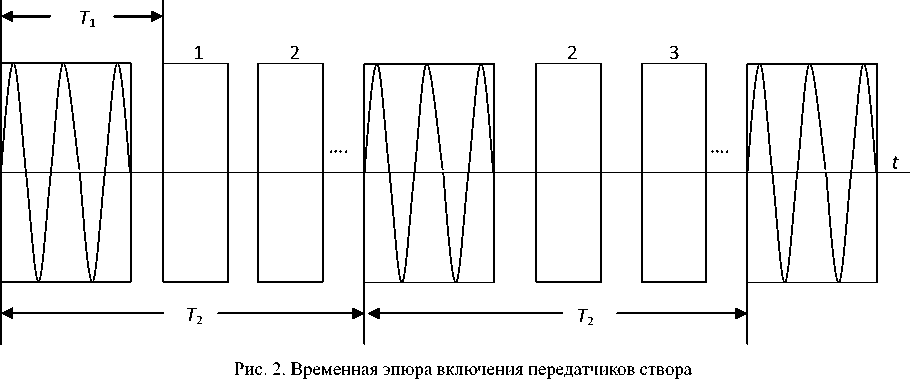
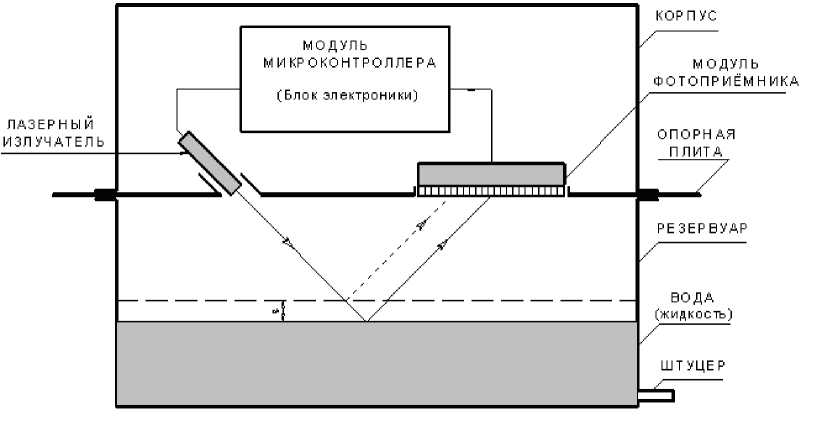
Рис. 3. Принцип работы датчика
Фотоприемное устройство преобразует отраженный световой поток лазерного источника в электрический сигнал, из которого с помощью микроконтроллера выделяется полезная частьи определяется координата положения луча (в пикселях). Полученные измерения передаются через магистральную линию связи на компьютер, где пересчитываются в фактические значения уровня и выводятся на экран монитора.
Для проведения замеров была создана экспериментальная установка (рис. 4).
К станине 1, закрепленной на фрезерном станке 5, с помощью регулируемого крепления присоединяется датчик уровня жидкости 2. Натойже станине 2 закрепляется индикатор 4, опирающийся измерительной рейкой на подвижный в вертикальной плоскости стол 6 фрезерного станка. На стол 6 так же неподвижно устанавливается емкость3.
Принцип работы экспериментальной установки заключается в следующем: при перемещении стола 6 в вертикальной плоскости происходит изменение расстояния между датчиком и поверхностью жидкости в емкости 3. Фактические показания изменения расстояния отсчитываются по индикатору 4. Измеренное в соответствии с принципом работы датчика значение уровня жидкости передается на ПК для дальнейшей обработки.
Конструктивно датчик (рис. 5) состоит из двух закрепленных на опорной плите из дюралюминия толщиной 10 мм модулей:
– модуля электронного блока, размещенного в герметичном пластиковом корпусе G368 фирмы GAINTA, установленного на опорной плите;
– водоналивного съемного резервуара (емкости), закрепленного на нижней поверхности плиты.


Рис. 4. Фото экспериментальной установки: 1 – крепежная станина; 2 – датчик; 3 – емкость с жидкостью; 4 – индикатор часового типа ИЧ-50; 5 – станина фрезерного станка; 6 – подъемный стол фрезерного станка
Опорная плита имеет крепежные отверстия для установки изделия на базовые опорные конструкции объекта измерений.
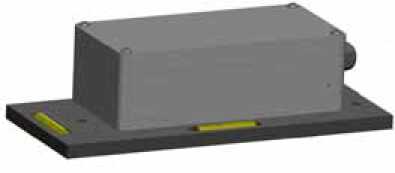
Рис. 5. Общий вид датчика 1 – плита опорная; 2 – корпус датчика; 3 – гермоввод; 4 – уровни установки датчика по горизонтали
Координатно-временная зависимостьрезультатов измерения при фиксированном уровне жидкости в течение длительного времени представлена на рис. 6.
По результатам экспериментов было отмечено влияние окружающих факторов (вибрации, колебаний возду-хаит. д.) на показания датчика с течением времени. Данное явление связано с низкой вязкостью воды и долгим временем затухания колебаний поверхности воды, вызванных воздействием окружающих факторов.
Результаты измерений приведены в таблице.
Разработка метода деформометрического мониторин га плотин. В процессе выполнения работ по проекту пред- полагается разработка эффективной автоматизированной системы деформометрического обследования и мониторинга потенциально опасных зон береговых примыканий правого и левого берега плотины Саяно-Шушенской ГЭС, для оценки их состояния и предупреждения возможных аварийных ситуаций и принятия превентивных мер по их предотвращению.
Основными задачами мониторинга береговых примыканий являются следующие:
– определение характера развития процесса подвижек, величин линейных изменений сдвижений и деформаций примыканий изон скальных пород;
– определение форм и размеров приконтактных зон сдвижения и деформирования прилегающих скальных пород и надскальной земной поверхности в области береговых примыканий;
– определение общей продолжительности и декремента процесса сдвижения горных пород в периоды опасных деформаций;
– установление взаимосвязи линейных сдвижений и деформаций горных пород в зонах береговых примыканий с процессами колебаний гребня плотины и величин линейных изменений размеров створа;
– определение величин допустимых и предельных деформаций для скальных пород примыканий и расчет их предельных напряженностей;
– оценка эффективности применяемых мер и методов деформометрического мониторинга зон береговых при-

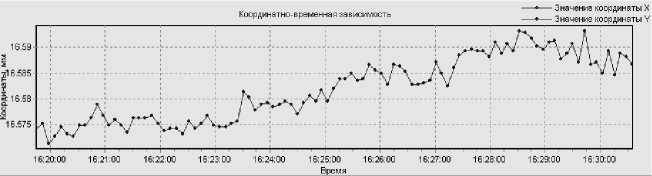
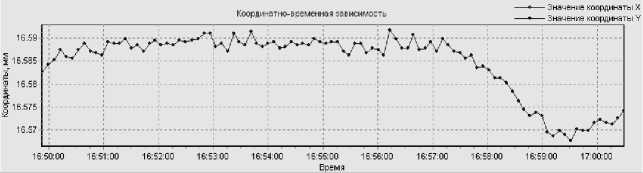
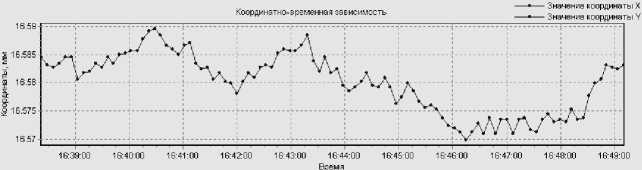
Рис. 6. Результаты измерения уровня рабочей жидкости (воды) с использованием емкости типа «а»
мыканий, своевременная их корректировка и разработка новых методик и аппаратно-программных средств систем.
Измерительная система деформометрического мониторинга должна включать:
– автоматическое многоточечное измерение расстояний, смещений, деформаций, конвергенций, а также градиентов скоростей и ускорений с помощью индуктивных бесконтактных датчиков;
– проведение скважинных измерений деформаций краевых участков массивов горных пород и фундаментов;
– контрольфлуктуаций и раскрытия трещин в обделке тоннелей, массивах горных пород и береговых примыканиях;
– измерение микросмещений несущих элементов конструкций плотины, измерение деформаций и микросмещений ответственных узлов инженерных сооружений;
– организацию сети наблюдения за состоянием потенциально опасных объектов, создание локальных измерительных участков, обеспечивающих проведение измерений различными типами датчиков, аналого-цифровое преобразование и регистрацию данных, объединенных общей системой сбора данных наблюдений;
– организацию телеметрической сети сбора информации и управления измерительными пунктами как распределенной радиально-параллельной, цифровой системы с использованием интеллектуальных устройств сбора, предварительной обработки и накопления данных наблюдений;
– подключение и использование в сети мониторинга, кроме штатных измерителей, других датчиков и прибо- ловиях реальных техногенных и природных воздействий с накоплением информации в локальной базе.
Итак, в процессе работы по проекту было установлено, что оптимальными рабочими частотами радиотехнического створа можно считатьчастоты 2,4 и 8 ГГц, соответствующие разрешенным участкам радиодиапазона для индустриальных применений при мощности излучения не более 5 МВт.
Определено, что для снижения влияния метеоусловий на погрешностьизмерения расстояния целесообразным является метод последовательного измерения приращений дальности вдоль створа с начальной привязкой к опорной береговой радиолинии и системе оценки координаты опорного передатчика с помощью космических радионавигационных систем ГЛОНАСС/GPS.
В дальнейших работах по проекту необходимо выб-ратьоптимальные размеры антенн, разработатьи реализовать опытную радиолинию, произвести экспериментальные наблюдения и определить пути реализации опытного образца системы.
Разработаны конструктивные решения оптического датчика уровня жидкости в гидронивелирах, создан макетный образец датчика, изготовлен и испытан стенд для проведения экспериментальных работ по исследованию параметров данного изделия. В результате проведенных экспериментов была уточнена конструкция изделия, получены решения, позволяющие получать требуемую точностьизмеренийуровня жидкости в гид- ров, позволяющих проводитьнаклономерные измерения, ронивелирах.
измерения радиоактивности и других медленно меняю щихся процессов. Библиографическая ссылка
Деформометрический мониторинг должен обеспечи вать автоматическое, долговременное непрерывное на- 1. Шайдуров Г. Я. Автоматизированный контрольгид- блюдение за состоянием контролируемых объектов вус- ротехнических сооружений. Новосибирск : Наука, 2009.
Результаты измерения уровня рабочей жидкости (воды)
|
Уровеньпо показаниям контрольного индикатора, мм |
Измеренный уровень, мм |
Отклонение, мм |
|
0 |
0,080 |
0,08 |
|
5 |
4,986 |
–0,014 |
|
10 |
9,988 |
–0,012 |
|
15 |
15,005 |
0,005 |
|
20 |
19,990 |
–0,01 |
|
25 |
25,011 |
0,011 |
|
30 |
30,017 |
0,017 |
|
35 |
35,02 |
0,02 |
|
40 |
39,998 |
–0,002 |
G. Ya. Shaidurov, V. N. Vetoshkin, V. V. Gondarev, M. N. Susloparov
NEW DIRECTIONS IN RESEARCH OF HYDRAULIC STRUCTURES SAFETY CONTROL
In the article we examine conceptual approach of competitive technologies making for big hydro engineering, structures monitoring – radio power site, automatic hydroxonium and level gauge sensors for dam structures coastal contiguity control.
