Новые подходы к теории риска

Автор: Гальянов И.В.
Журнал: Вестник аграрной науки @vestnikogau
Рубрика: Научное обеспечение охраны труда и производственных рисков в АПК
Статья в выпуске: 5 (20), 2009 года.
Бесплатный доступ
Изложен вероятностный подход к проблеме риска. Предложены четыре класса риска для использования классов при проведении аттестации рабочих мест.
Риск, несчастный случай, вероятность, безопасность
Короткий адрес: https://sciup.org/147124528
IDR: 147124528 | УДК: 658.382.3(045):614.8-057
Текст научной статьи Новые подходы к теории риска
сельском хозяйстве, предложена следующая математическая концепция риска. Состояние системы Человек-Машина-Среда (ЧМС) рассматривается как свойство свободного изменения ее производственных факторов, вызванного любыми причинами [1,2,3]. Изменения могут быть представлены в нелинейном виде:
dy
— = Fi ( у 1 , у 2,..., У п ), i = 1,2,..., n (1) dt
Примем за безопасное состояние некоторый установившийся процесс работы системы, описываемый функцией yi x ( t ) . Отклонения от этого состояния и переход в опасное представим изменениями yi ( t ) (рис. 1). Отклонения, определяемые уравнением 1 при определенных начальных условиях yi ( to ) обозначим через yi ( t ) :
x i ( t ) = y i ( t ) - y x ( t ), i = 1 , 2 , ... , n , (2)
тогда можно написать уравнение возможного изменения в отклонениях в виде:
dx
— =Ф , ( x 1 , X 2
,...,
, X n ), i = 1,2,..., n , (3)
при этом состояние системы, соответствующее безопасному, будет при
xi ( t ) =0. Переменные
факторы Xi (x1, x 2,..., xn), i = 1,2,..., n являются координатами состояния системы в отклонениях.
В общем случае конкретный вид уравнений (3) зависит от вида процесса yi ( t ) , так как эти уравнения получаются из 1 подстановкой 2.
Состояние системы при Xi x ( t ) = 0 называется
безопасным, если приняв "трубку" сколь угодно малого n-мерного сечения ε (рис.2), система в
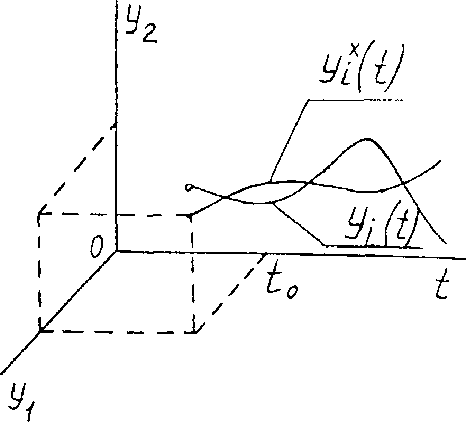
Рис. 1. Изменения параметров системы : Y x (t) - функция безопасного состояния системы, Yi(t) - функция опасного состояния системы.
начальный момент t о принимает область начальных
условий õ , зависящую от
ε
, что с увеличением
t
функция отклонений Xi(t) не выйдет из заданной "трубки" ε . Математическое понятия безопасности формулируется следующим образом: состояние
системы при X ix ( t ) =0 называется безопасным, если
при заданном (нормированном) ε > 0 сколько бы оно мало ни было, существует еще более малое õ>0 ,
зависящее от
ε
, что при начальных условиях:
| X i (t o ) | < õ, i= 1,2, ..., n, (4)
в дальнейшем изменении to < t < ∞ выполняется условие безопасности:
| X i (t no ) | < ε , i= 1,2 ..., n, (5)
Геометрически это означает, что все решения,
которые при t = t о начинаются в õ - окрестности точки
Геометрически безопасное состояние системы n-го порядка можно представить условно в виде некоторой интегральной кривой в n-мерном пространстве с добавленной осью времени t (рис. 1.) Опасное состояние yi(t ), вызванное начальным отклонением при t=t о , изобразится другой интегральной кривой yix ( t ) . В качестве начального отклонения могут быть конструктивные несовершенства рабочих мест, машин и технологий, выраженные через отклонения факторов (параметров).
В отклонениях Xi(t) , т.е. в пространстве координат, опасное состояния системы будет выглядеть так, как показано на рисунке 2.
(X10, ..., Xn) никогда не покинут ε трубку решения
Х i (t) (рис.2).
Состояние системы будет опасным, если указанное условие не выполняется, хотя бы для одного отклонения Xi . Если условия, указанные в 4,5 выполнимы и имеем Xi ( t ) → 0 при t → ∞ , то безопасность системы при X i x = 0 будет устойчивой. Если же Xi ( n ) → 0 при t → ∞ после любых начальных отклонений, то система будет безопасной всегда (абсолютно безопасной). Однако это не означает, что будут безопасны и все процессы в системе, так как свойства составляющих системы
меняются с изменением времени. Примером может
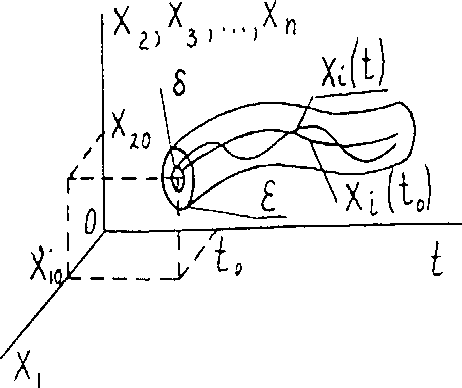
Рис. 2. Изменения параметров системы в отклонениях:
служить наличие в системе уравнений второго порядка, неустойчивых предельных нормированных значений. В этом случае состояние системы оказывается опасной при больших начальных
отклонениях, выходящих за границу
ε
т.е. система
безопасна в "малом" и опасна в "большом".
Проведенные теоретические исследования
позволяют выявить следующее состояние системы ЧМС и предложить классы опасности.
1. Класс 1. Система абсолютно безопасна, когда
параметры системы не превышают опасных
(вредных) уровней, все решения X ix ( t ) не выходят
Xi(to) - функция отклонений в начальный момент времени,
X i (t) - функция отклонений параметра при увеличении времени,
ε , õ - условия безопасного состояния системы.
Если X i x ( t ) = 0 , то функция X ix ( t ) изобразится прямой линией и совпадет с осью t .
из "трубки" õ (ПДК, ПДУ, система технически исправна). Вероятность появления опасности равна 0.
2. Класс 2. Система условно безопасна, когда параметры системы выходят из "трубки" õ , но не
покидают "трубку"
ε
. Появляется риск в работе.
Вероятность становится больше ноля, но меньше 0,5. Параметры системы в отклонениях становятся опасными (превышают ПДК, ПДУ, система требует отдельных регулировок). Для предупреждения
несчастного случая достаточно применить защитные
средства или выполнить профилактические мероприятия (выполнить регулировки, затянуть резьбовые соединения, установить защитные кожухи и другое).
3. Класс 3. Система находится в опасном
восстанавливает первоначальные функции собственными силами, без внешней помощи.
Класс 3в. Производственные факторы в абсолютных значениях или в отклонениях покидают
состоянии, когда параметры покидают
трубку" ε .
"трубку"
ε
и превышают безвредные значения на
Вероятность появления опасности равна или больше 0,5, но меньше 1. Несчастный случай может произойти в любой момент времени. Защитные средства, профилактические мероприятия не устраняют опасности. Требуется прекращение эксплуатации системы, чтобы устранить опасность.
4. Класс 4. Система находится в аварийном
такую величину, при которой, после прекращения действия фактора, организм восстанавливает первоначальные функции после лечения или после применения внешней помощи.
Класс 4в. Производственные факторы в абсолютных значениях или в отклонениях покидают
"трубку"
ε
и превышают безвредные значения на
состоянии, когда параметры системы достигли предельных значений, тогда вероятность появления опасности равняется 1. Это означает, что при включении системы в работу она перейдет в аварийное состояние и произойдет несчастный случай, если человек будет находиться в зоне действия опасности. Система или её опасный элемент должны быть заменены безопасными.
Теоретические исследования состояния системы позволяют предложить четыре класса вредностей.
Класс 1в. Производственные факторы в абсолютных значениях или в отклонениях не
такую величину, при которой после прекращения действия фактора, организм не восстанавливает первоначальных функций даже после лечения.
Развивается профессиональное заболевание.
Предложенные теоретические подходы могут послужить научной основой в разработке классов риска при проведении аттестации рабочих мест по
условиям и охране труда в отраслях агропромышленного производства.
покидают "трубки" õ и не превышают безвредных уровней (ПДК, ПДУ). Система безвредна.
Класс 2в. Производственные факторы в отклонениях или абсолютных значениях выходят из
"трубки" õ , но не покидают "трубку"
ε
и
превышают безвредные значения (ПДК, ПДУ) на
такую величину, при которой после прекращения
действия
фактора, организм человека
Список литературы Новые подходы к теории риска
- Вентцель, Е. С. Теория вероятности/Е. С. Вентцель. -М.: Наука, 1969. -576 с.
- Ляпунов А.М. Общая задача об устойчивости движения/А. М. Ляпунов. -М.:Гостехиздат, 1950. -384 с.: ил.
- Гальянов И.В. Улучшение условий и охраны труда механизаторов сельского хозяйства путем совершенствования техники и технологий.: 05.26.01.: автореф. дис. на соиск. учен. степ. докт. техн. наук/Иван Васильевич Гальянов. -С.П.: ГАУ, 1999. -46 с.
